

- На протяжении своей истории, от первых рассказов азимова про роботов до alphago, у ии были взлёты и падения. но на самом деле его история только начинается.
- Atlas Unplugged
- . AlphaGo обыгрывает чемпиона мира по го (2023)
- . Роботы пол-дэнсеры – Lexy и Tess
- ASIMO и P-серия от Honda
- Алан Тьюринг предложил свою «Игру в имитацию» (1950)
- Конференция по ИИ в Дартмуте (1956)
- ICub
- Poppy
- Фрэнк Розенблатт создаёт перцептрон (1957)
- Romeo
- ИИ сталкивается со своей первой зимой (1970-е)
- Приход второй зимы ИИ (1987)
- Petman
- IBM Deep Blue побеждает Каспарова (1997)
- NAO
- Нейросеть видит кошек (2023)
- Джоффри Хинтон спустил с поводка глубокие нейросети (2023)
- Aiko Chihira
- Bittle – программируемый роботизированный кот
- Marscat – домашний робот-кот
- Roybi – портативный робот-компаньон с ии
- Smartipresence – простой робот телеприсутствия
- Thimble: новая электронная игрушка каждый месяц
- Заботливый kiki
- Интеллектуальные роботы и многоагентные робототехнические системы: перспективы социальной интеграции
- Развитие искусственного интеллекта
- Робот-автомобиль zumi
- Рост индивидуализации
- Способность учиться и полная автономность: тренды в области робототехники
- Увеличение автоматизации
На протяжении своей истории, от первых рассказов азимова про роботов до alphago, у ии были взлёты и падения. но на самом деле его история только начинается.
Искусственный интеллект пока ещё очень молод. Однако в этой области произошло уже много значимых событий. Некоторые из них привлекли внимание культуры, другие породили взрывную волну, воспринятую только учёными. Вот некоторые ключевые моменты, наиболее сильно повлиявшие на развитие ИИ.
Рассказ Азимова ”
” отмечает первое появление в историях этого знаменитого фантаста «трёх законов робототехники»:
- Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
- Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
- Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому или Второму Законам.
В рассказе «Хоровод» робот Спиди ставится в положение, в котором третий закон входит в противоречие с первыми двумя. Рассказы Азимова про роботов заставили задуматься любителей НФ, среди которых были и учёные, о возможности появления думающих машин. По сей день люди занимаются интеллектуальными упражнениями, применяя законы Азимова к современным ИИ.
Atlas Unplugged
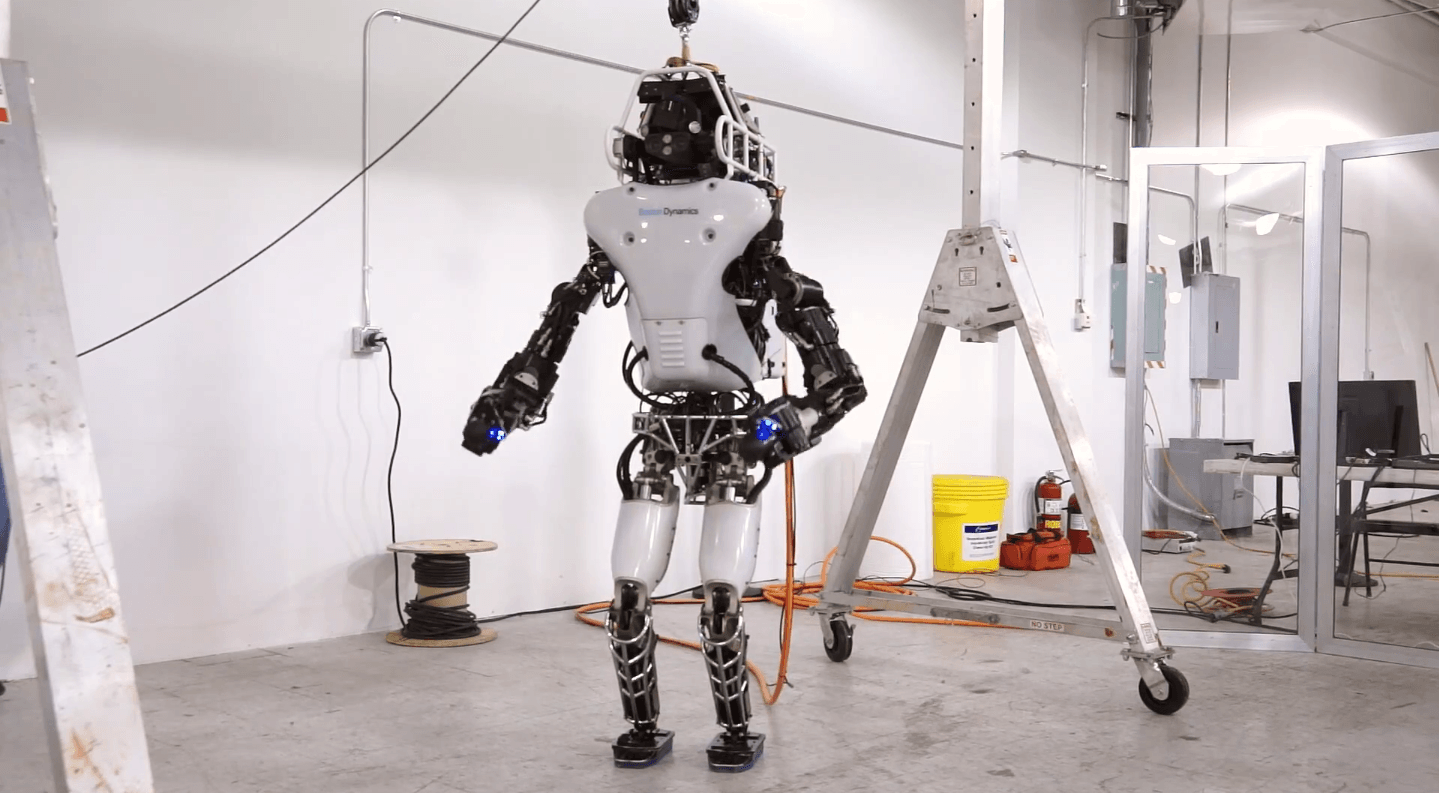
Последняя версия Atlas немного выше и тяжелее, чем предыдущая, ее высота составляет 1,88 м, а вес – 156,4 кг. По словам его создателей, 75% гуманоида обновлено — только нижняя часть его ног и стопы остались без изменений.
Робот Atlas был разработан компанией Boston Dynamics, принадлежащей Google, совместно с Управлением перспективных исследований и разработок Министерства обороны США. Atlas предназначен для перемещения по неровной открытой местности на двух ногах, он также может подняться с помощью рук и ног, как обычный человек.
. AlphaGo обыгрывает чемпиона мира по го (2023)
В 2023 году исследователи британского стартапа DeepMind опубликовали работу, где было описано, как нейросеть научилась играть и выигрывать в 50 старых игр от Atari. Под впечатлением от этого компанию купила Google – как говорят, за $400 млн. Однако главная слава DeepMind была ещё впереди.
Через несколько лет учёные из DeepMind, теперь уже в рамках Google, перешли от игр Atari к одной из самых старых задач ИИ – японской настольной игре го. Они разработали нейросеть AlphaGo, способную играть в го и обучаться во время игры. Программа провела тысячи партий против других версий AlphaGo, обучаясь на основе проигрышей и выигрышей.
И это сработало. AlphaGo обыграла величайшего игрока в го в мире, Ли Седоля, со счётом 4:1 в серии игр в марте 2023. Процесс снимали для документального фильма. При его просмотре трудно не заметить грусть, с которой Седоль воспринял проигрыш. Казалось, что проиграли все люди, а не только один человек.
Последние продвижения в области глубоких нейросетей настолько сильно изменили область ИИ, что реальная его история, возможно, только лишь начинается. Нас ждёт много надежд, шумихи и нетерпения, но сейчас уже ясно, что ИИ повлияет на все аспекты жизни XXI века – и возможно даже сильнее, чем в своё время это сделал интернет.
. Роботы пол-дэнсеры – Lexy и Tess

На выставке CeBIT в Ганновере немецкий разработчик программного обеспечения собрал стенд, на котором выставил двух танцующих роботов вместе с роботом-диджеем с мегафоном на голове. Две девушки-робота двигаются в такт музыке возле пилонов, но все удивительно культурно. По информации BBC, вы можете приобрести такого робота за $39,500.
ASIMO и P-серия от Honda
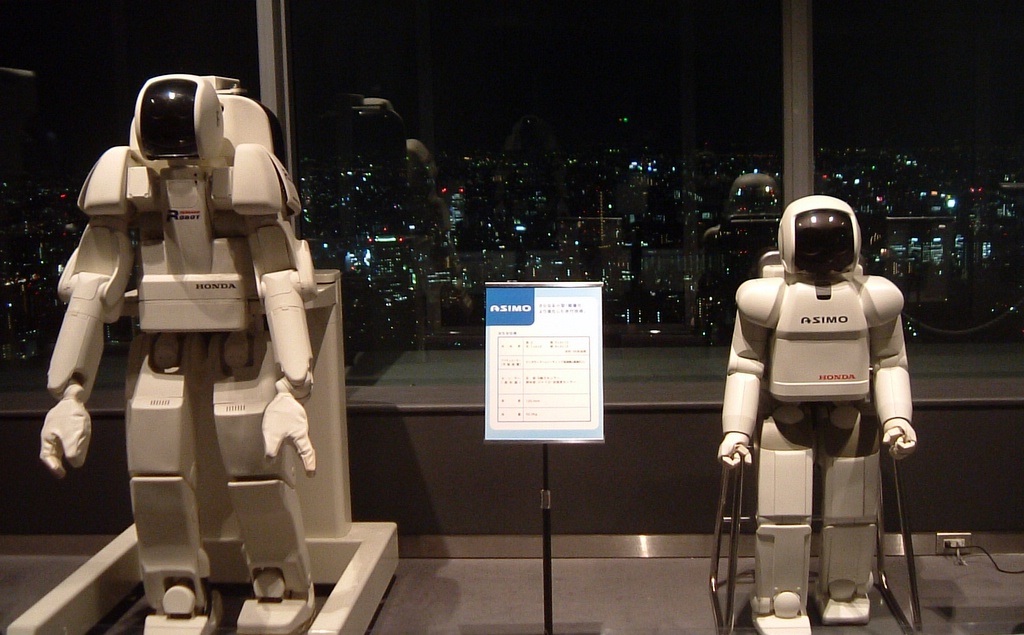
ASIMO является 11-м в линии шагающих роботов Р-серии, разработанных Honda. Представленный в 2000 году, ASIMO может ходить и бегать, как человек, что уже является удивительным. ASIMO был существенно обновлен в 2005 году, что позволило ему бегать в два раза быстрее (6 км/ч), взаимодействовать с людьми и выполнять повседневные задачи, например, держать тарелку и подавать еду. Количество текущих моделей ASIMO составляет 100 штук по всему миру, его высота — 1,28 м, а вес — около 55 кг.
ASIMO выглядит веселым и милым в своем скафандре. Он проложил путь для многих последующих моделей шагающих роботов, но все еще считается передовым и мощным роботом.
ASIMO является большим плюсом для международного брендинга Honda и помогает компании сформировать свой имидж в области инноваций и технологий. ASIMO также снимается в рекламных роликах для Honda и много выступает. Данный робот находится в этом списке из-за своего обаятельного внешнего вида, всемирной известности и передовых технологий разработки.
Алан Тьюринг предложил свою «Игру в имитацию» (1950)
 Алан Тьюринг описал первый принцип измерения степени разумности машины в 1950-м.
Алан Тьюринг описал первый принцип измерения степени разумности машины в 1950-м.
Предлагаю рассмотреть вопрос «Могут ли машины думать?» Так начиналась влиятельная исследовательская работа Тьюринга 1950 года, разработавшая систему взглядов для рассуждения о машинном разуме. Он задал вопрос о том, можно ли считать машину разумной, если она может имитировать разумное поведение человека.
Этот теоретический вопрос породил знаменитую «Игру в имитацию» [её позже назовут “Тестом Тьюринга” / прим. перев.], упражнение, в котором исследователь-человек должен определить, с кем он переписывается – с компьютером или человеком. Во времена Тьюринга не существовало машин, способных пройти этот тест, нет их и сегодня. Однако его тест дал простой способ определить наличие разума у машины. Также он помог сформировать философию ИИ.
Конференция по ИИ в Дартмуте (1956)
К 1955 году учёные всего мира уже сформировали такие концепции, как нейросети и естественный язык, однако ещё не существовал объединяющих концепций, охватывающих различные разновидности машинного интеллекта. Профессор математики из Дартмутского колледжа, Джон Маккарти, придумал термин «искусственный интеллект», объединяющий их все.
Маккарти руководил группой, подавшей заявку на грант для организации конференции по ИИ в 1956. В Дартмут-холл летом 1956 были приглашены многие ведущие исследователи того времени. Учёные обсуждали различные потенциальные области изучения ИИ, включая обучение и поиск, зрение, логические рассуждения, язык и разум, игры (в частности, шахматы), взаимодействия человека с такими разумными машинами, как личные роботы.
Общим консенсусом тех обсуждений стало то, что у ИИ есть огромный потенциал для того, чтобы принести пользу людям. Было очерчено общее поле исследовательских областей, на развитие которых может повлиять машинный интеллект. Конференция организовала и вдохновила исследования в области ИИ на многие годы.
ICub
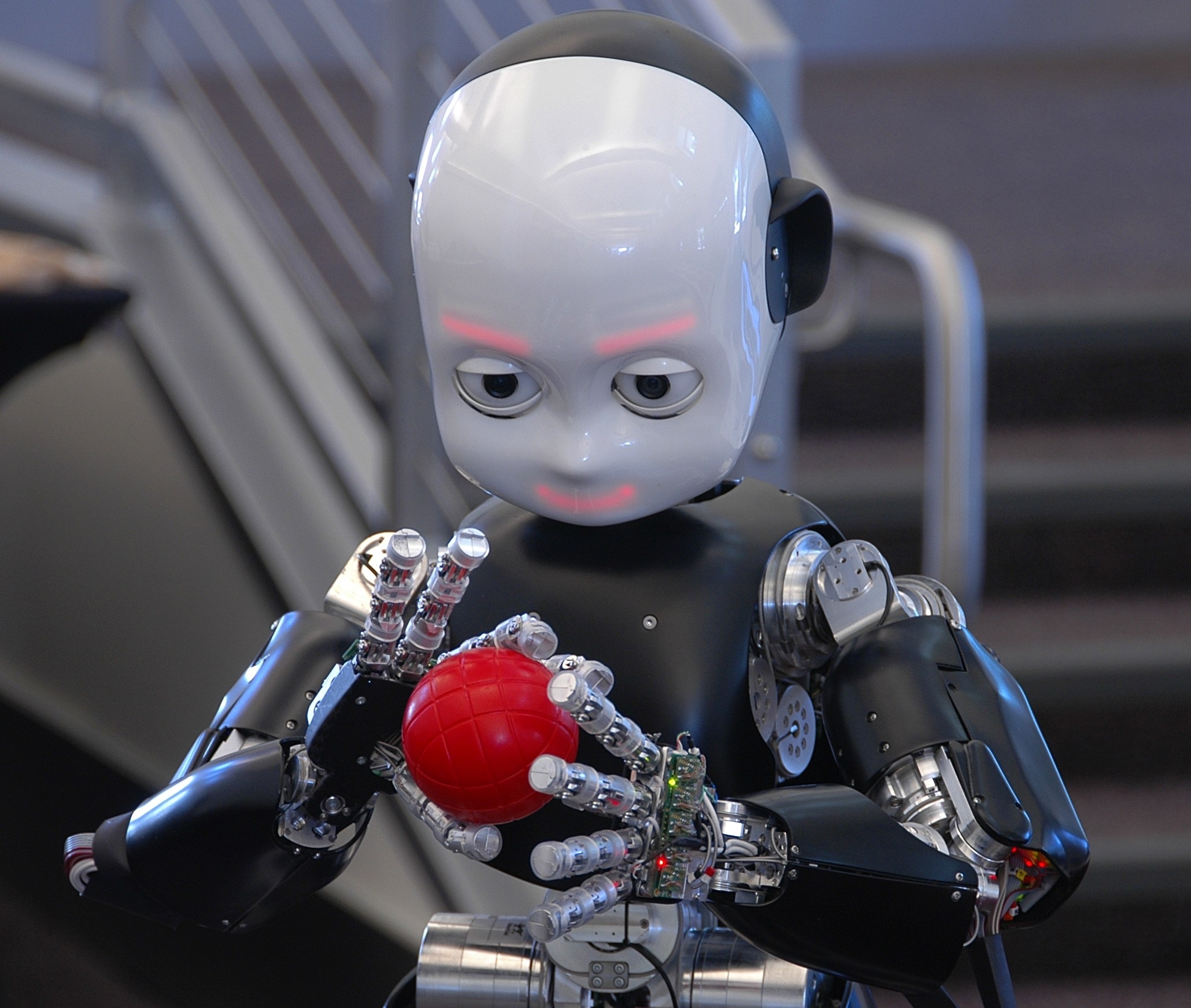
Внешность гуманоида является воплощенной гипотезой о познании.
Poppy
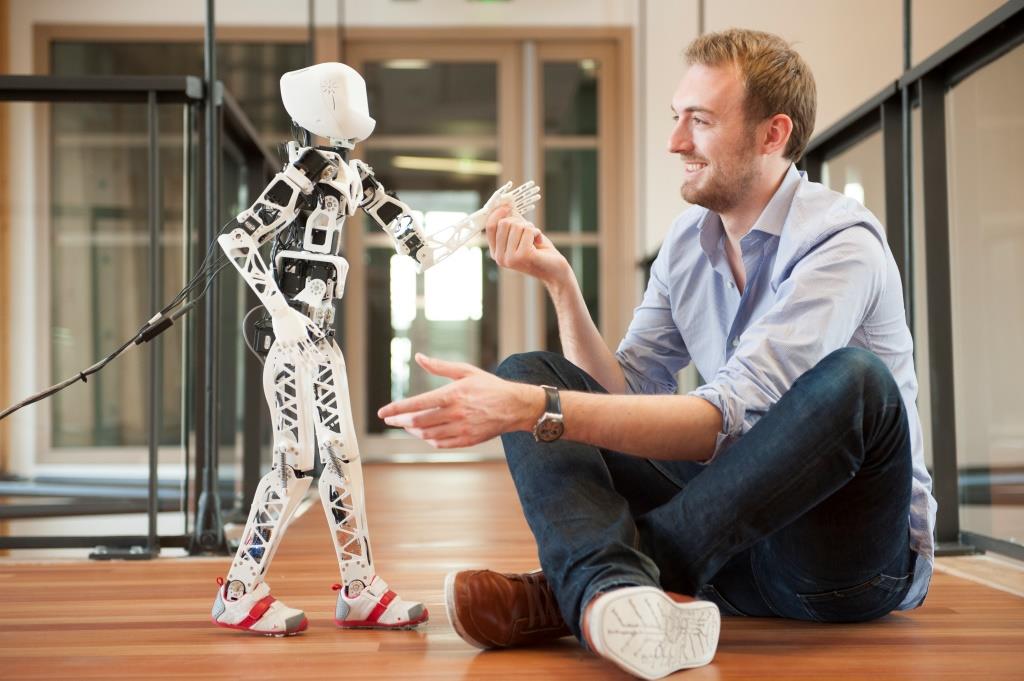
Poppy является одной из новейших разработок в сфере роботов-гуманоидов и первым в своем роде, ведь был создан с помощью 3D-принтера. Группа французских исследователей смогла сократить расходы на треть, используя новейшие 3D-технологии. Создатели Poppy сфокусировались на биологически правильной ходьбе, что, как они надеются, будет способствовать лучшему взаимодействию человека и робота.
У него есть позвоночник на шарнирах с пятью двигателями — почти неслыханное явление среди роботов такого размера. Позвоночник позволяет Poppy не только двигаться более естественно, но и помогает ему балансировать, регулируя его осанку. Дополнительная гибкость помогает при физическом взаимодействии с роботом — например, когда направляешь его своими руками, что в настоящее время необходимо, чтобы помогать роботу ходить. На видео вы можете увидеть невероятно естественную ходьбу робота – с пятки на носок.
Фрэнк Розенблатт создаёт перцептрон (1957)
 Фрэнк Розенблатт создал механическую нейросеть в Корнеллской лаборатории аэронавтики в 1957
Фрэнк Розенблатт создал механическую нейросеть в Корнеллской лаборатории аэронавтики в 1957
Базовый компонент нейросети называется “перцептроном” [это лишь самый первый и примитивный тип искусственного нейрона / прим. перев.]. Набор входящих данных попадает в узел, подсчитывающий выходное значение, и выдающий классификацию и уровень уверенности.
К примеру, входные данные могут анализировать различные аспекты изображения на основании входных данных и «голосовать» (с определённым уровнем уверенности) за то, есть ли на нём лицо. Затем узел подсчитывает все «голоса» и уровень уверенности, и выдаёт консенсус.
Однако перцептроны существовали ещё до появления мощных компьютеров. В конце 1950-х молодой психолог-исследователь Фрэнк Розенблатт создал электромеханическую модель перцептрона под названием Mark I Perceptron, хранящуюся сегодня в Смитсоновском институте.
Это была аналоговая нейросеть, состоявшая из сетки светочувствительных элементов, соединённых проводами с банками узлов, содержащих электромоторы и поворотные резисторы. Розенблатт разработал «перцептронный алгоритм», управлявший сетью, которая постепенно подстраивала силу входных сигналов так, чтобы в итоге правильно идентифицировать объекты – по сути, обучалась.
Учёные спорили о значимости этой машины вплоть до 1980-х. Она сыграла важную роль по созданию физического воплощения нейросети, которая до тех пор существовала в основном только в виде научной концепции.
Romeo
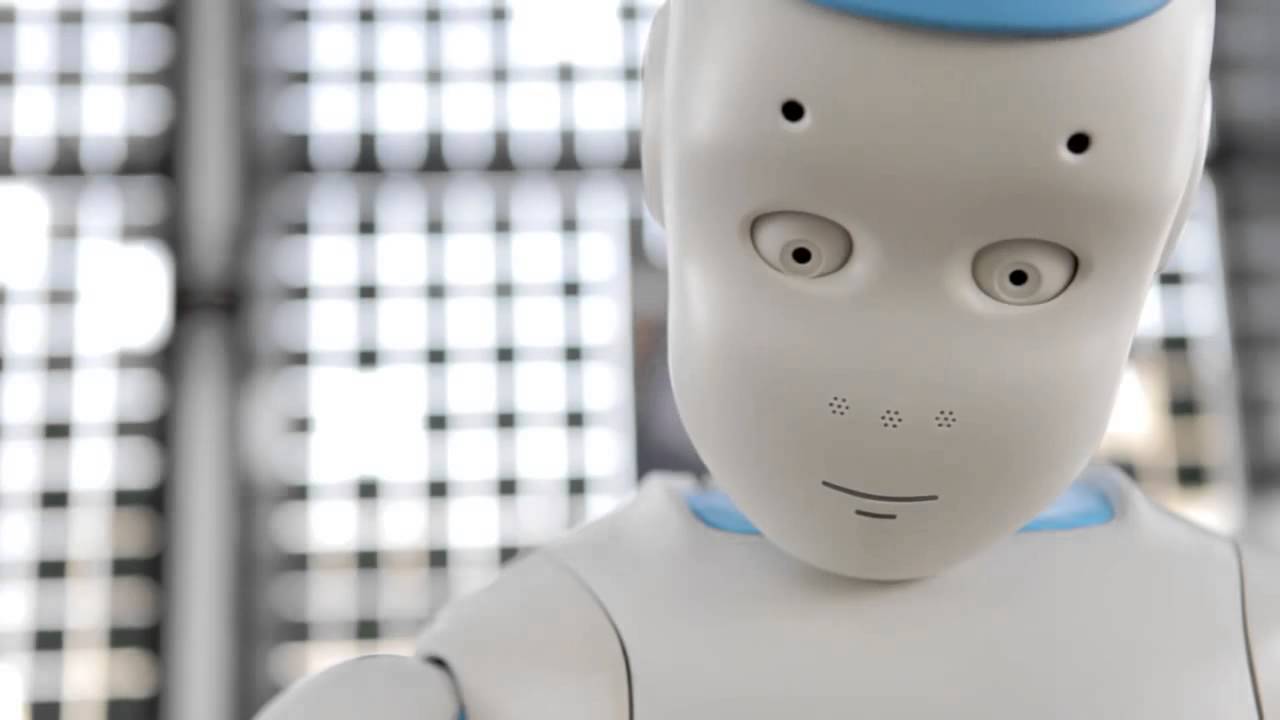
Romeo стремится стать лидером в области роботизированной помощи и личной помощи с более существенным эмоциональным компонентом. Romeo — потомок маленького человекоподобного робота по имени NAO, имеющего уже более 5000 продаж и договоров об аренде во всем мире.
Робот размером ребенка восьми лет (1,40 м), а весит немного больше (40 кг). Чтобы быть как можно более легким, его корпус выполнен из углеродного волокна и резины и был разработан таким образом, чтобы избежать риска причинения вреда человеку, которому он будет помогать. На сегодняшний день Ромео может ходить, различать трехмерное окружение, слышать и говорить.
График тестирования робота в реальных условиях планируется на 2023 год, конечная цель – готовность к использованию в домах престарелых в 2023-м или 2023 году. Разработка частично финансируется французским правительством и Европейской комиссией, проект бюджета на разработку Romeo составляет 37 млн. евро за период 2009-2023 гг.
ИИ сталкивается со своей первой зимой (1970-е)
Большую часть своей истории ИИ существовал только в исследованиях. Большую половину 1960-х правительственные агентства, в частности, DARPA, вливали деньги в исследования и практически не требовали отчёта по инвестициям. Исследователи ИИ часто преувеличивали потенциал своей работы, чтобы продолжать получать финансирование.
Всё изменилось в конце 1960-х и начале 1970-х. Два отчёта – один от рекомендательного совета по автоматической обработке языка (ALPAC) для правительства США 1966 года, второй от Лайтхилла для правительства Британии 1973 года – прагматически оценили прогресс в исследованиях ИИ и выдали весьма пессимистичный прогноз о потенциале данной технологии.
В обоих отчётах ставилось под вопрос наличие ощутимого прогресса в различных областях исследований ИИ. Лайтхилл в своём отчёте утверждал, что ИИ для задач распознавания речи будет крайне сложно масштабировать до размеров, которые смогут быть полезными правительству или военным.
В итоге правительства США и Британии начали урезать финансирование исследований ИИ для университетов. DARPA, без проблем финансировавшее исследования ИИ в 1960-х, стало требовать от проектов чётких временных рамок и подробного описания предполагаемых результатов.
Приход второй зимы ИИ (1987)
1980-е начались с разработки и первых успехов ”
“, хранивших большие объёмы данных и эмулировавшие процесс принятия решений людьми. Технологию изначально разработали в университете Карнеги-Меллона для компании Digital Equipment Corporation, а затем другие корпорации начали быстро внедрять её. Однако экспертные системы требовали дорогого спеиализированного оборудования, и это стало проблемой, когда начали появляться сходные по мощности и более дешёвые рабочие станции от Sun Microsystems а также персональные компьютеры от Apple и IBM. Рынок экспертных компьютерных систем рухнул в 1987, когда с него ушли основные производители оборудования.
Успех экспертных систем в начале 80-х вдохновил DARPA на увеличение финансирования исследований ИИ, но вскоре это вновь поменялось, и агентство урезало большую часть этого финансирования, оставив всего несколько программ. И снова термин «искусственный интеллект» в исследовательском сообществе стал почти запретным.
Чтобы их не воспринимали, как непрактичных мечтателей в поисках финансирования, исследователи начали использовать другие названия для работы, связанной с СС – «информатика», «машинное обучение» и «аналитика». Эта, вторая зима ИИ продолжалась вплоть до 2000-х.
Petman

Petman является антропоморфным роботом, предназначенным для тестирования одежды, защищающей от химического воздействия. Естественное движение очень важно для Petman, чтобы смоделировать ситуацию, когда солдат в защитной одежде подвергается внешнему воздействию в реальных условиях.
В отличие от предыдущих роботов для тестирования костюмов, которые имели ограниченный спектр движений и должны были поддерживаться механически, Petman балансирует и свободно перемещается; ходит, нагибается и выполняет разнообразные физические упражнения под воздействием химических радиоактивных веществ.
Petman также обладает имитацией физиологии человека в защитном костюме путем контроля температуры, влажности и потливости, чтобы обеспечить реалистичные условия испытаний. Система Petman была предоставлена для тестирования и в настоящее время проходит тестирование.
IBM Deep Blue побеждает Каспарова (1997)
 IBM Deep Blue победила лучшего шахматиста мира, Гарри Каспарова, в 1997.
IBM Deep Blue победила лучшего шахматиста мира, Гарри Каспарова, в 1997.
Общественное представление об ИИ улучшилось в 1997 году, когда шахматный компьютер Deep Blue от IBM победил тогдашнего чемпиона мира Гарри Каспарова. Из шести игр, проводившихся в телестудии, Deep Blue выиграла в двух, Каспаров в одной, а три окончились вничью. Ранее в том году Каспаров победил предыдущую версию Deep Blue.
У компьютера Deep Blue было достаточно вычислительных мощностей, и он использовал «метод грубой силы», или полный перебор, оценивая 200 млн возможных ходов в секунду и подбирая наилучший. Возможности людей ограничиваются оценкой лишь порядка 50 ходов после каждого хода.
И всё же победа Deep Blue над Каспаровым впечатляющим образом вернула ИИ в круг общественного внимания. Некоторые люди были очарованы. Другим не понравилось, что машина обыграла эксперта в шахматах. Инвесторы были впечатлены: победа Deep Blue на $10 подняла стоимость акций IBM, выведя их на максимум того времени.
NAO
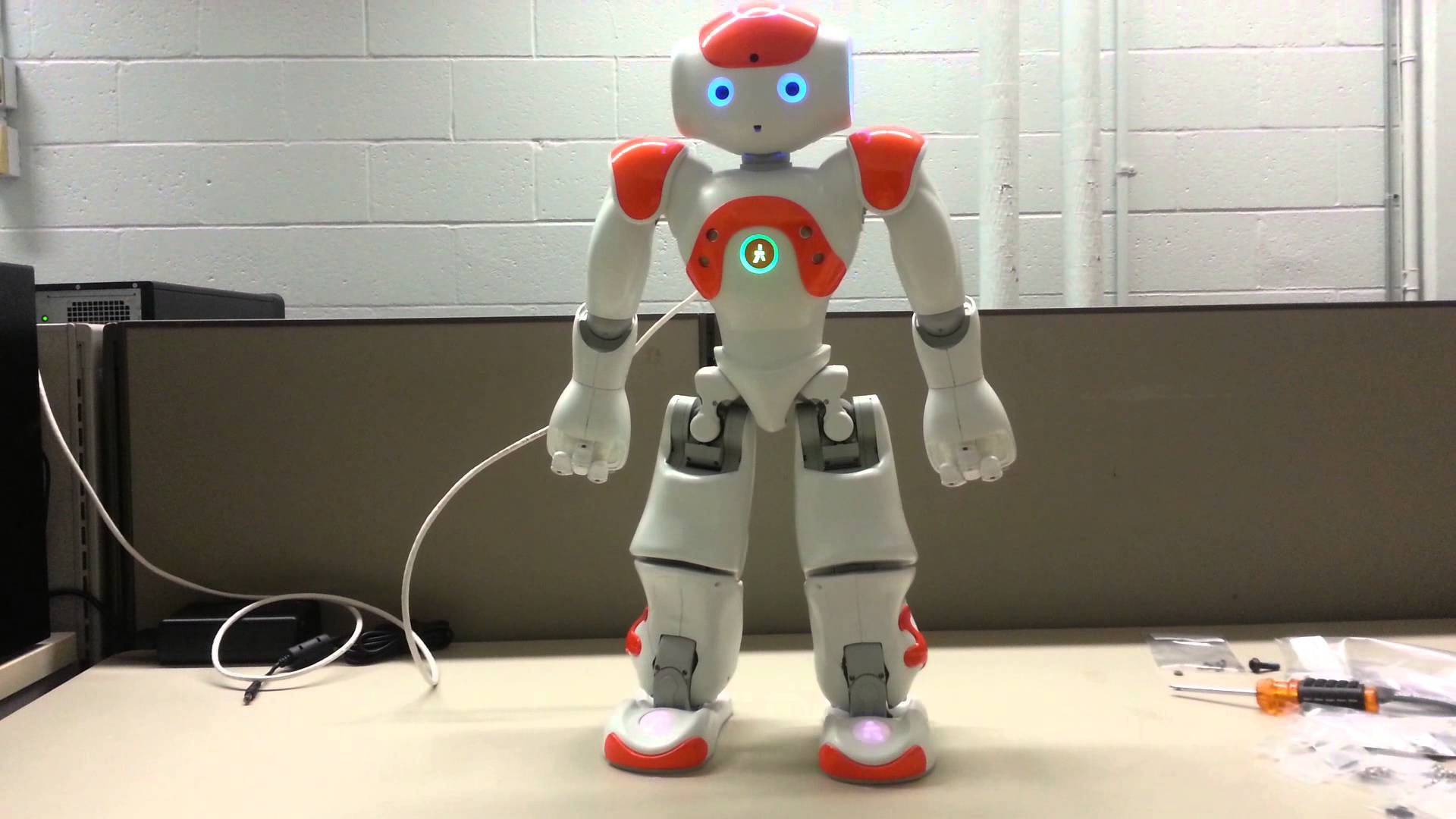
NAO представляет собой человекоподобного робота высотой 58 см. Он был создан, чтобы стать дружелюбными компаньоном для дома. С 2008 года выпущено уже несколько версий робота.
Самым известным экземпляром NAO является Nao Academics Edition, который разработан для университетов и лабораторий для помощи в научных исследованиях и образовании. Он был выпущен для учреждений в 2008 году и стал доступен для покупателей к 2023-му. Более поздние обновления для платформы Nao включают 2023 Nao Next Gen и 2023 Nao Evolution.
Роботы NAO использовались в сфере исследований и образования в многочисленных научных учреждениях во всем мире. По состоянию на 2023 год свыше 5000 роботов Nao используются в более чем 50 странах.
Нейросеть видит кошек (2023)
К 2023 году учёные из университетов всего мира говорили о нейросетях и создавали их. В том году программист
из Google познакомился с профессором информатики из Стэнфорда
. Вдвоём они замыслили создание большой нейросети, обеспеченной огромной вычислительной энергией серверов Google, которой можно будет скормить огромный набор изображений.
Джоффри Хинтон спустил с поводка глубокие нейросети (2023)
 Исследование Джоффри Хинтона помогло возродить интерес к глубокому обучению
Исследование Джоффри Хинтона помогло возродить интерес к глубокому обучению
Через год после прорыва Дина и Ына профессор Торонтского университета Джоффри Хинтон с двумя своими студентами создали нейросеть для компьютерного зрения AlexNet для участия в соревновании по распознаванию изображений ImageNet. Участники должны были использовать свои системы для обработки миллионов тестовых изображений и определять их с наивысшей возможной точностью.
AlexNet выиграла соревнование с процентом ошибок в два с лишним раза меньшим, чем у ближайшего конкурента. В пяти вариантах подписи к изображению, данных нейросетью, только в 15,3% случаев не было правильного варианта. Предыдущим рекордом было 26% ошибок.
Эта победа убедительно показала, что глубокие нейросети, работающие на графических процессорах, куда как лучше других систем могут точно определять и классифицировать изображения. Это событие, возможно, сильнее остальных повлияло на возрождение интереса к глубоким нейросетям, и заслужило Хинтону прозвище «крёстный отец глубокого обучения». Вместе с другими гуру в области ИИ, Йошуа Бенджио и Яном Лекуном, Хинтон получил долгожданную премию Тьюринга в 2023.
Aiko Chihira

Aiko Chihira может работать автономно, говорить и жестикулировать во время общения с людьми. Исследователи недавно продемонстрировали, что Aiko Chihira более продвинутее, чем среднестатистические подобные андроиды. Робот знает язык жестов и автоматически адаптируется к положению собеседника.
Bittle – программируемый роботизированный кот
Bittle – это игрушечный аналог роботов от Boston Dynamic. Он чем-то напоминает и другого робота-собаку – Sony Aibo. Но при этом Bittle продается по цене роботизированной игрушки в виде конструктора для самостоятельной сборки.
Bittle умеет ловко преодолевать препятствия, двигаясь на четырех лапах как настоящие животные. Он может запоминать десятки шаблонных движений, выполнять причудливые трюки по командам с пульта управления. А в случае потери равновесия и опрокидывания робот способен вернуться в исходное положение и продолжить движение к цели.
Bittle создан на основе доработанной платы Arduino, для сложных движений использует различные датчики и внешние устройства. Плата управления включает процессор Atmega328P/16 МГц, 2 КБ памяти SRAM и 32 КБ флэш-памяти. Кроме того есть инерциальный измерительный модуль, блок ШИМ для 12 сервоприводов, инфракрасный приемник и зуммер. Есть 4 разъема для модулей расширения.
Bittle – это открытая платформа, позволяющая объединить гаджеты разных производителей в единую систему. Добавить роботу возможности ИИ можно подключением микрокомпьютера Raspberry Pi. Написанная на Python программа может запускаться на Raspberry Pi и других поддерживаемых процессорах, управляя Bittle через проводное или беспроводное соединение.
Для упрощенного программирования есть фреймворк OpenCat. Он определяет минимальную структуру данных и алгоритмы движений для четвероногих роботов. Вы сможете научить Bittle новым навыкам и трюкам, чтобы выигрывать призы в соревнованиях международного сообщества OpenCat.
Marscat – домашний робот-кот
Полностью автономный, интерактивный MarsCat – идеальный робот-игрушка с программируемыми возможностями. Он может выражать эмоции мяуканьем, движениями тела и глаз. Сделать поведение MarsCat натуральным и выразительным помогают 16 серводвигателей.
Программируемый микроконтроллер ATMega2560 позволяет реализовать 6 программируемых шаблонов поведения, MarsCat может быть восторженным или задумчивым, энергичным или ленивым, общительным или застенчивым.
Моделировать поведение настоящего животного помогают алгоритмы ИИ, реализуемые миникомпьютером Raspberry PI. Приобретенные одним роботом навыки и шаблоны поведения хранятся в отдельном модуле памяти и могут быть легко воспроизведены в другом роботе простой заменой памяти. Программировать поведение робота MarsCat помогает специальный комплект разработчика.
Реализовать проект MarsCat в жизнь помогли 227 спонсоров, вложивших в эту идею через Кикстартер $213 198.
Roybi – портативный робот-компаньон с ии
Портативный компаньон на базе ИИ создан для обучения детей иностранным языкам и базовым навыкам точных наук. Интерактивный робот идентифицирует ребенка по лицу, распознает эмоции и демонстрирует дружелюбное поведение для вовлечения детей в процесс обучения. Система распознавания голоса позволяет оценивать точность ответов и произношения.
ROYBI взаимодействует с повсеместно доступной онлайн-платформой для обучения детей и взрослых. Контролировать и оценивать занятия помогают формируемые роботом отчеты с рекомендациями по улучшению процесса обучения.
ROYBI был включен в США по версии CNBC в список 100 наиболее перспективных стартапов в 2023 году.
Запущенный на платформе Индигого проект ROYBI привлек $120 538
Smartipresence – простой робот телеприсутствия
Конструктор Smartipresence поможет создавать собственных недорогих роботов телеприсутствия на основе любого смартфона.
Запущенное на смартфоне приложение поддерживает режим ИИ и позволяет распознавать образы с помощью облачного сервиса. По команде пользователя Smartipresence в сеансе видеосвязи будет сопровождать человека или даже домашнее животное, чтобы его лучше видел удаленный собеседник.
Этот проект английского инженера Росса Аткина уже поддержали на Кикстартер 186 спонсоров, собравших для запуска проекта $17329.
В этой подборке мы собрали наиболее интересные и перспективные модели детских роботов-игрушек, включающие технологии телеприсутствия, распознавания речи и голоса, автономность действий и поведения на основе ИИ и машинного обучения, которые еще недавно были доступны лишь «взрослым роботам».
Thimble: новая электронная игрушка каждый месяц
Электронные наборы компании Thimble предназначены для любознательных детей и взрослых. Они помогают в увлекательной форме изучать основы электроники, робототехники, мехатроники и программного обеспечения. Новые наборы деталей для создания высылаются по подписке ежемесячно.
Среди наборов Thimble представлены комплекты для сборки игровых контроллеров, музыкальных синтезаторов, устройств для Умного дома. Можно заняться сборкой более сложных программируемых роботов на микроконтроллере Arduino с управлением через Wi-Fi.
Для начинающих предназначены более простые наборы: различные световые и музыкальные игрушки, термометры, таймеры, дверные звонки. Приложение Thimble включает пошаговые руководства по сборке и позволяет обмениваться опытом и знаниями с другими сборщиками каждой игрушки.
Для развития проекта Thimble через Кикстартер собрано $295 760 от 1776 заинтересованных заказчиков.
thimble.io
Заботливый kiki
Kiki – это робот-компаньон для детей и взрослых. Он распознает эмоции и действия собеседника, способен реагировать на них. Робот развивает свои уникальные способности в зависимости от особенностей взаимодействия с окружающим миром, при этом меняется и его поведение.
Высокопроизводительный встроенный процессор позволяет Kiki запускать модели глубокого обучения, чтобы распознавать лицо и адекватно воспринимать реакции собеседника. Несколько сенсорных датчиков в разных частях корпуса помогают воспринимать поглаживания, а всенаправленные микрофоны позволяют искать человека даже вне поля обзора камеры.
Реалистичное поведение этого робота базируется на исследованиях ведущих психологов о личностных особенностях человека. Действия в соответствии с заложенными моделями поведения и обучения обеспечивают некую осмысленность и логичность поступков Kiki.
Самообучающийся робот Kiki собрал на платформе Кикстартер $105 611.
kiki.ai
Интеллектуальные роботы и многоагентные робототехнические системы: перспективы социальной интеграции
УДК 16 316.3
DOI:10.17726/philIT.2023.12.2.6
Интеллектуальные роботы и многоагентные робототехнические системы: перспективы социальной интеграции
Диане Секу Абдель Кадер,
ассистент, кандидат технических наук, Московский технологический университет (МИРЭА) Москва, Российская Федерация
Аннотация. В статье рассматриваются социальные аспекты развития интеллектуальной робототехники. Показано, что рост применения технологий интеллектуального управления и обработки информации в различных видах деятельности человека открывает новый этап в развитии робототехнических систем. Робототехнические системы применяются в целях автоматизации тяжелой или опасной для человека работы. Вместе с тем, распространение интеллектуальных робототехнических систем начинает существенно влиять на производительность труда людей, на образ жизни, мировосприятие. Повышение уровня интеллектуализации робототехнических систем выводит робототехнические системы в сферу взаимодействия с человеком. Роботы из орудий труда превращаются в субъектов общественной жизни. Показаны тенденции развития интеллектуальных робототехнических систем. Рассмотрены позитивные и негативные социальные последствия развития робототехнических систем в экономической, политической, духовной и социальной сферах общественной жизнедеятельности. Обоснована необходимость социально-гуманитарной экспертизы развития робототехнических систем. Показаны перспективы социальной интеграции многоагентных робототехни-ческих систем.
Ключевые слова: общество, интеллектуальные роботы, многоагентные робототехнические системы.
Intellectual robots and multi-agent robotic systems: perspectives of social integration
Diane Seku A. K.,
Assistant. Ph.D., Moscow Technological University, Moscow, Russia
Abstract. The article discusses the social aspects of intellectual robotics development. It is shown that the growth in the application of technologies of intelligent control and information processing in various types of human activities opens a new stage in the development of robotic systems. Robotic systems are used to automate labor that is difficult or hazardous to human health. However, the proliferation of intelligent robotic systems begins to significantly affect people productivity, as well as their lifestyle and worldview. Increasing the level of intellectualization of the robotic systems brings robotic systems into the field of human interaction. Robots are transforming from tools of labor into the subjects of social life. The trends in the development of intelligent robotic systems are discussed. Positive and negative social consequences of robotic systems development are examined in the economic, political, cultural and social realms of society. The necessity of socio-humanitarian expertise in development of robotic systems is justified. The article also shows prospects of social integration of multi-agent robotic systems.
Keywords: society, intelligent robotic systems, multi-robot system.
Введение
Стремительное развитие технологий интеллектуального управления и обработки информации на фоне научных открытий в области энергетики, машиностроения, микропроцессорной техники и телекоммуникационных систем, обуславливают новый этап в производстве и применении робототехнических систем (РТС) [1, 2].
Уже с середины XX века подобные системы применяются в целом ряде сфер хозяйственной деятельности человека в целях автоматизации выполнения тяжелой или опасной для человека работы. К числу прикладных применений робототехнических систем относятся: изготовление деталей и сборных конструкций различной сложности, обслуживание складов, проведение военных операций и аварийно-спасательных работ, работа по дому. Применяются ро-
боты и в таких областях, как освоение планет Солнечной системы, медицина, индустрия развлечений и др.
Одновременно с распространением робототехнических систем повышается и уровень их интеллектуализации. Этот процесс выводит робототехнические системы на новую ступень развития, когда из орудия труда роботы постепенно трансформируются в субъекты общественной жизни. При этом меняются и сами люди, их деятельность, производительность труда, их образ жизни, мировоззрение, жизненный мир [3]. Целью настоящей работы является анализ влияния интеллектуальных робототехнических систем на общество, и оценка перспектив социальной интеграции робототехнических систем.
В первом разделе статьи рассматриваются тенденции развития интеллектуальных робототехнических систем, во втором разделе обсуждаются позитивные и негативные последствия развития интеллектуальной робототехники, в третьем разделе перспективы социальной интеграции многоагентных робототехнических систем.
1. Тенденции развития интеллектуальных робототехнических систем
Роль интеллектуальных робототехнических систем в нашей жизни с каждым годом возрастает. Так, совсем недавно, подобные системы получили применение в сфере пассажирских перевозок, связанной напрямую с миллиардами людей. Опытная серия беспилотных автомобилей для городских условий «Google driverless car» была успешно протестирована на улицах нескольких штатов Америки. Интеллектуальная система управления подобных транспортных средств позволяла адекватно оценивать дорожную ситуацию и передвигаться в автоматическом режиме на сотни километров, как в городе, так и по пересеченной местности. Осознавая перспективы применения автономных транспортных средств, ряд крупных автомобилестроительных компаний уже заявил об их массовом производстве в течение ближайших десяти лет [4, 5].
Достаточно давно ведутся исследования в области антропоморфных роботов («ASIMO», «iCub», «Repliee Q2»). Интерес к таким роботам вызван в первую очередь потенциальной возможностью их использования для выполнения широкого спектра задач из повседневной жизни человека (в противоположность специализированным робототехническим системам). Однако на данный момент, в связи с их дороговизной, и все еще недостаточно высокой авто-
номностью этот вид роботов не получил массового распространения. Тем не менее, уже сегодня роботы-андроиды используются для проведения экскурсий, обучения детей и присмотра за людьми с ограниченными возможностями.
Весьма существенно влияние робототехнических систем в сфере здравоохранения. Большие успехи достигнуты в хирургии. Так, например, роботизированным аппаратом «Da Vinci» было проведено свыше 200 тыс. операций по всему миру. Кроме того, за последние десять лет наука подошла вплотную к интеграции средств взаимодействия с техникой непосредственно в мозг человека. Уже стали реальностью бионические протезы и системы искусственного зрения, управляемые посредством нейрокомпью-терных интерфейсов [6].
Важно отметить, что интеллект современных РТС, построенный на основе классических (символьно-логических) методов, пока еще существенно отличается по своим возможностям от человеческого [7, 8, 9]. Вопросы творчества, обобщения знаний, выявления закономерностей, планирования действий решены лишь для узкого круга задач. Однако все более очевидными становятся пути решения этих проблем с применением нейросетевого подхода. В частности, в работах Дж. Хокинса описывается многоуровневая нейросетевая структура, способная моделировать процессы восприятия, прогнозирования, генерации образов и управляющих информационных последовательностей [7]. Универсальность ней-росетевых моделей позволит интеллектуальным робототехниче-ским системам без труда обрабатывать данные различной природы, будь то видеоизображение, звук, или тактильная информация.
Стоит отметить, что любая робототехническая система, насколько бы совершенной она не была, имеет ограничения по числу выполняемых функций, скорости выполнения технологических операций, радиусу действия и т.д. В связи с этим внимание мирового научно-технического сообщества, начиная с конца прошлого века, привлечено к проблематике многоагентных робототехнических систем (МАРС), в которых ограничения отдельных робототехнических агентов восполняются функциональными возможностями, появляющимися в результате взаимодействия нескольких роботов. Подобные системы активно применяются при выполнении сельхозуборочных работ, обслуживании складов, разведке и картографировании обширных участков местности. Опыт-
ные образцы многоагентных робототехнических систем успешно справляются с задачами возведения сложных инженерных конструкций [4].
2. Социальные последствия развития робототехнических систем
Как и любая технология мирового уровня, интеллектуальные робототехнические системы открывают человечеству множество перспектив, но, в то же время, таят в себе ряд потенциальных опасностей (см. таблица 1). Очевидными последствиями развития интеллектуальных робототехнических систем представляется облегчение труда человека, увеличение количества материальных благ на душу населения. Но сложно с уверенностью говорить об альтернативах духовного развития общества, поддержания социальной справедливости, распределения экономических благ, установления баланса сил на мировой арене. Здесь многое зависит от самих людей, и от той политической обстановки, в рамках которой произойдет грядущий скачок в развитии интеллектуальной робототехники.
С другой стороны, уже сейчас способности роботов-андроидов заставляют задуматься о том, что рано или поздно интеллектуальные роботы станут субъектами политических отношений, способными влиять на жизнь общества. В ближайшие десятилетия это влияние будет по большей мере пассивным. Проявляться оно будет исключительно в применении таких систем наряду с обычными техническими устройствами. Однако в долгосрочной перспективе, при приближении интеллекта технических систем к уровню человека, возможен вариант, когда роботы заменят собой существующие структуры власти, наподобие того, как светофоры способны заменить регулировщиков дорожного движения.
Интеллектуальная робототехника хранит в себе огромный потенциал для развития духовной сферы общественной жизни. Переложив работу на плечи техники, человек сможет больше времени уделять творческим занятиям [10]. Созидательные способности людей при этом будут многократно усилены возможностями робо-тотехнических систем, управляемых посредством нейрокомпью-терного интерфейса.
Следует, однако, помнить, что возможен и альтернативный вариант, когда необдуманное использование интеллектуальных РТС приведет к обострению социально-политических проблем. Роботы
№ 2 (12), декабрь 2023
– 79
URL: http://cyberspace.pglu.ru
Таблица 1
Возможные последствия развития интеллектуальных РТС в различных сферах общественной жизни
Сфера Позитивные последствия Негативные последствия
Экономическая – интенсификация производства и экономический рост; – экспансия человечества в космическое пространство – повышение уровня безработицы; – социальное расслоение вследствие неравномерности распределения технологий
Политическая – рациональное управление государством; – устранение внутри-и внешнеполитических конфликтов – рост поражающей способности военной техники; – тоталитаризм на базе мощных средств охраны правопорядка
Духовная – освобождение времени для духовного роста человека; – появление новых шедевров искусства, созданных роботами – отсутствие духовных целеустремлений на фоне избытка материальных благ; – отказ от общения в пользу взаимодействия с РТС
Социальная – новый уровень образования, здравоохранения, коммунальных услуг; – дезурбанизация на новой технологической основе – ухудшение экологической обстановки; – угроза человечеству как более слабому виду
тогда станут причиной безработицы, материального расслоения, отстраненности людей друг от друга [11]. Возможно также, что применение робототехнических систем обострит военные конфликты, нанесет непоправимый вред окружающей среде и даже поставит под угрозу существование человечества. Избежать столь негативных последствий можно, лишь при надлежащем контроле за распространением и применением интеллектуальных робототехнических систем [12, 13].
3. Перспективы социальной интеграции многоагентных робототехнических систем
Растущие темпы разработки робототехнических систем различного типа и назначения обуславливают рост общей численности РТС и объективную возможность для их объединения
в многоагентные робототехнические системы. Подобные системы потенциально обладают большей эффективностью и надежностью и могут проявлять эмерджентные свойства, дающие значительный экономический эффект. Так, задачи, невыполнимые с привлечением сложной дорогостоящей РТС, могут быть решены многоагент-ной системой, состоящей из нескольких простых и узкоспециализированных робототехнических устройств [2]. При этом очевидно, что возможности МАРС, построенных на основе интеллектуальных роботов, многократно возрастут.
Экономические перспективы использования подобных систем связаны, в первую очередь, с возможностью координированного выполнения проектов государственной значимости в сферах промышленного производства, строительства или же с выполнением военных и аварийно-спасательных операций.
Повышение автономности интеллектуальных роботов рано или поздно приведет, с одной стороны, к широкомасштабной организации высокотехнологичных безлюдных производств, а с другой – к созданию обособленных «поселений» роботов, нацеленных на их техническое обслуживание и модернизацию. Не исключено, что подобное положение дел будет способствовать зарождению коллективного сознания РТС, нацеленного, в том числе, и на участие в политической жизни общества.
При соответствующем контроле со стороны людей-экспертов территориально разнесенные РТС, объединенные общей информационной сетью, смогут не только осуществлять экономическое планирование производственных и логистических процессов [14], но также решать задачи регионального и государственного управления.
С распространением МАРС свое развитие получит и духовная сфера жизни общества. Станет возможной организация театральных и кинематографических постановок на базе коллективов ро-бототехнических систем. Появятся новые научные исследования в области естествознания, медицины, техники – от микромира до космических масштабов – с использованием групп робото-технических агентов, оснащенных необходимыми информационно-измерительными и исполнительными устройствами.
Появление сетей роботов телеприсутствия (аватаров) с развитыми функциональными возможностями коренным образом изменит формат социальной жизни. Откроются новые возможно-
№ 2 (12), декабрь 2023
– 81
URL: http://cyberspace.pglu.ru
сти для развития социальной инфраструктуры. Повседневные действия, связанные с выходом за пределы дома, такие как прогулка или покупка продуктов будут заменены на цифровое перемещение между несколькими удаленно расположенными роботами, автономно выполняющими распоряжения человека [15]. Заключение
Перед человечеством открываются широкие перспективы развития и применения робототехнических систем в различных сферах общественной жизни. Осознать возможные последствия их использования и выбрать оптимальный путь социальной интеграции робототехнических систем необходимо уже сейчас. Дальнейшее развитие РТС не ограничится повышением скорости и качества производства продуктов потребления. Оно сулит человечеству новые открытия и достижения в энергетике, промышленности, медицине, культуре. Интеллектуальные роботы и многоагентные робототехнические системы позволят на новом технологическом уровне осваивать необитаемые территории Земли и космическое пространство. В то же время, необходимо непрестанно следить за ролью человека в этом новом, автоматизированном, мире. И стремиться к тому, чтобы безграничные возможности робототех-нических систем не тратились впустую, а использовались для личностного развития человека и решения общечеловеческих задач, которые, по большому счету, еще только предстоит определить.
Литература:
1. Конвергенция биологических, информационных, нано- и когнитивных технологий: вызов философии (материалы круглого стола) // Вопросы философии. 2023. № 12. – С. 3-23. (The convergence of biological, information, nano- and cognitive technologies: the challenge of philosophy (a round table) // Voprosy filosofii. 2023. № 12. – P. 3-23.)
2. Манько С. В., Лохин В. М., Романов М. П. Концепция построения мультиагентных робототехнических систем // Российский технологический журнал. 2023. Т. 1 № 3 (8). – С. 156-165. (Man’ko S.V., Lokhin V. M., Romanov M. P. Concept of multi-agent robotic systems // Rossijskij tekhnologicheskij zhurnal. 2023. T.1 № 3 (8). – P. 156-165.)
3. Лекторский В. А., Кудж С. А., Никитина Е. А. Эпистемология, наука, жизненный мир человека // Российский технологический журнал. 2023. № 2 (3). – С. 1-12. (Lectorsky V. A., Kudzh P. A., Nikitina E. A. Epistemology, science, the world of human life // Rossijskij tekhnologicheskij zhurnal. 2023. № 2 (3). – P. 1-12.)
4. Макаров И.М., Лохин В. М., Манько С. В. и др. Мультиагентные ро-бототехнические системы: примеры и перспективы применения //
Мехатроника, автоматизация, управление. М.: Новые технологии, 2023. № 2. – С. 22-32. (Makarov I. M., Lokhin V M., Man’ko S.V., etc. Multi-agent robotic systems: examples and prospects for application // Mekhatronika, avtomatizaciya, upravlenie. M.: Novye tekhnologii, 2023. № 2. – P. 22-32.)
5. Манько С. В., Диане С. А.К. Перспективы создания и пути разработки автономного электромобиля для городских условий на основе комплексного применения интеллектуальных технологий управления // Мехатроника, автоматизация, управление. 2023. № 12. – С. 46-52. (Man’ko S.V, Diane S. A.K. The prospects for the creation and the development of Autonomous electric vehicle for the urban environment based on the integrated application of intelligent control technology // Mekha-tronika, avtomatizaciya, upravlenie. 2023. № 12. – P. 46-52.)
6. Orenstein D. People with paralysis control robotic arms using brain-computer interface. URL: http://newP.brown.edu/pressreleases/2023/05/ braingate2.
7. Hawkins J., Blakeslee P. On intelligence. Henry Holt. New York. 2004. -261 p.
8. Алексеева И. Ю., Никитина Е. А. Интеллект и технологии. М.: Проспект, 2023. – 96 с. (Alekseeva I. Yu., Nikitina E. A. Intelligence and technology. M.: Prospekt, 2023. – 96 p.)
9. НикитинаЕ. А. Конвергентные технологии и трансформация структуры познания // Образовательные ресурсы и технологии. 2023. № 5 (8). – С. 157-166. (Nikitina E. A. Convergent technologies and the transformation of the structure of knowledge // Obrazovatel’nye resursy i tekhnologii. 2023. № 5 (8). P. 157-166.)
10. Никитина Е. А. Проблема субъекта познания в современной эпистемологии // Перспективы науки и образования. 2023. № 2 (14). – С. 1624. (Nikitina E. A. The problem of the subject of knowledge in modern epistemology // Perspektivy nauki i obrazovaniya. 2023. № 2 (14). -P. 16-24.)
11. Гречин А. А. Социальные аспекты развития интеллектуальной робототехники // Искусственный интеллект: философия, методология, инновации. Материалы III Всероссийской конференции студентов, аспирантов и молодых ученых; под ред. Д. И. Дубровского и Е. А. Никитиной. Москва, МИРЭА, 1-1 3 ноября 2009. М.: Связь-Принт, 2009. – С. 219-221. (Grechin A. A. Social aspects of the development of intelligent robot technology // Artificial intelligence: philosophy, methodology, innovation. Proceedings of the III all-Russian conference of students, postgraduates and young scientists. Ed. by D. I. Dubrovsky and E. A. Nikitina. M.: Svyaz’-Print, 2009. – P. 219-221.)
12. Рыкова С.М., Слепынина Е. А. Создание модели нормативно-правовой базы эксплуатации автономных робототехнических и мехатрон-ных систем военного назначения // Искусственный интеллект: философия, методология, инновации. Сборник трудов IX всероссийской конференции студентов, аспирантов и молодых ученых; отв. ред.
Е. А. Никитина. М.: Радио и связь, 2023. – С. 221-226. (Rykova P. M., Slepynina E. A. The Creation of a model regulatory framework operation of Autonomous robotic and mechatronic systems for military use // Artificial intelligence: philosophy, methodology, innovation. Proceedings of the IX all-Russian conference of students, postgraduates and young scientists. Resp. ed E. A. Nikitina. M.: Radio i svyaz’, 2023. – P. 221-226.)
13. Никитина Е. А. Искусственный интеллект: философия, методология, инновации // Философские проблемы информационных технологий и киберпространства. 2023. № 2. Vol. 8. – C. 108-122. doi: 10.17726/ philIT.165.12. (Nikitina E. A. Artificial intelligence: philosophy, methodology, innovation // Filosofskie problemy informacionnyh tekhnologij i kiberprostranstva. 2023. № 2. Vol. 8. C. 108-122.)
14. Ивушкин К. В., Минаков И. А., Ржевский Г. А., Скобелев П. О. Муль-тиагентная система для решения задач логистики. URL: http://www. adalius.ru/web_press_detals.php?id=23. (Ivushkin K. V, Minakov I. A., Rzhev G. A., Skobelev P. O. Multi-agent system for solving logistics problems. URL: http://www.adaliuP.ru/web_press_detalP. php?id=23.)
15. Лохин В. М., Манько С. В., Александрова Р. И., Романов М. П., Диане С. А.К. Принципы построения и программно-алгоритмическое обеспечение человеко-машинного интерфейса для автономных роботов и мультиагентных робототехнических систем // Мехатрони-ка, автоматизация, управление. М.: Новые технологии. 2023. № 9. Том 17. – С. 606-614. (Lohin V. M., Man’ko S.V., Aleksandrova R. I., Romanov M. P., Diane P. A.K. Principles of design and software and algorithmic support of human-machine interface for autonomous robots and multi-agent robotic systems // Mehatronika, avtomatizacija, upravlenie. M.: Novye tehnologii. 2023. № 9. Vol. 17. – P. 606-614.)
Развитие искусственного интеллекта
Последний сценарий. Здесь можно ожидать развития мобильных и полностью автономных интеллектуальных роботов. Они смогут справляться со сложными и динамичными задачами: работать в аэропортах, вокзалах и в отелях.
На этом рынке главную роль сыграет разработка программного обеспечения. Потенциально при развитии такого сценария компании, создающие роботов, сместятся на второй план. Они скорее превратятся в платформы для тестирования новых вариантов ПО.
Робот-автомобиль zumi
Роботизированный автомобиль Zumi помогает детям изучать основы сложных наук, писать программы с использованием блочного кодирования и языка Python. Более опытные программисты смогут создавать программы для уникальных экспериментов с беспилотными автомобилями, научатся проектировать собственные нейронные сети, чтобы обучить Zumi классифицировать объекты и распознавать лица и жесты людей.
В процессе передвижения по трассе Zumi использует Tensor Flow и Open CV – это те же самые программные инструменты, что есть и у настоящих беспилотных автомобилей.
Прототип Zumi был удостоен награды «Лучшая инновация» в категории «Роботы и дроны» на выставке CES 2023
Реализовать проект Zumi в жизнь помогли 888 спонсоров, вложивших в эту идею через $150 091
Рост индивидуализации
Этот сценарий больше всего похож на то, что происходит в области робототехники сегодня. Скорее всего, компании начнут создавать кастомизированных роботов, направленных на решение задач, требуемых отдельным потребителям. Возможно, кто-то создаст робота, собирающего клубнику, или машину, способную взять образцы крови.
Конечно, стоит учитывать, что на этом рынке изначально будет очень высокий ценник. Более того, производители роботов не смогут увеличить объемы производства, чтобы снизить затраты. В такой среде преимущество будет у специализированных маленьких или средних компаний и стартапов, которые легко адаптируются под запросы потребителей и могут создать нишевый продукт.
Способность учиться и полная автономность: тренды в области робототехники
Вырастет востребованность роботов, способных выполнять функции сервиса профессиональных услуг. Их стоимость на рынке, по расчетам исследователей, составит от $90 млрд до $170 млрд, в то время как объем рынка промышленных и коллаборативных роботов будет в два раза меньше — от $40 до $50 млрд.
Социальные тренды ускорят потребность в высокотехнологичных робототехнических решениях. С взрослением современного поколения, уже привыкшего использовать роботов, увеличится спрос на ассистентов, которые будут помогать с упражнениями, личной гигиеной, доставкой еды.
Увеличится количество роботов в низкооплачиваемых сферах. Эксперты отмечают, что нехватка ручного труда и повышение заработной платы в странах, где раньше она была низкой, приведет к достаточно быстрой замене людей роботами. Сейчас, чтобы преодолеть проблему старения населения и роста заработных плат, роботизированные технологии начали активно внедрять на предприятиях Китая. С 2008 года зарплаты работников заводов в стране увеличились на 71%.
Искусственный интеллект и другие технологические решения сблизят людей и роботов. Развитие роботизированных технологий и увеличение возможностей ассистентов значительно упростят взаимодействие с ними. Искусственный интеллект вскоре позволит роботам без помощи людей справляться с неожиданными ситуациями.
Роевой интеллект увеличит возможности мобильных роботов: они смогут распределять задачи между друг другом и даже изменять их. Системы визуализации способствуют развитию больше автономности во время анализа и проверки данных. Развитие сетей связи 5G и других коммуникационных возможностей станут толчком к увеличению радиуса действия роботов и облачных сетей, расширяющих вычислительную мощность роботов и датчиков.
Роботы начнут учиться. Сегодня решению задач реального мира роботы обучаются на специальных симуляторах, но это достаточно грубый метод, которого постепенно становится недостаточно: ситуативность и мгновенные решения роботам по-прежнему отчасти неподвластны.
Чтобы обучить этому руку, инженерам потребовалось 50 часов, в течение которых она получила опыт приблизительно в 100 человеческих лет.
Машины с условной автоматизацией освоят больше задач. Автомобили по-прежнему с помощью сигнала будут сообщать водителю о том, что необходима помощь, хотя их функционал значительно увеличится, вплоть до маневрирования без помощи человека в заранее запрограммированной местности.
Азиатские компании по производству робототехники, которые сейчас составляют малую часть рынка, начнут конкурировать с американскими и европейскими гигантами. Ретейлеры азиатских странах начинают активно модернизировать свои производства, чтобы удовлетворить растущий спрос на продукцию, поэтому производители роботов (в том числе стартапы) должны учитывать этот фактор и использовать его в качестве отправной точки для роста.
Увеличение автоматизации
Второй вероятный путь развития робототехники. В этом случае роботы смогут занять рабочие места: появятся роботы-курьеры, роботы-сборщики и роботы для зарядки электромобилей.
Лидерами на этом рынке станут компании, способные масштабировать производство за счет создания дешевых мехатронных устройств. Таких роботов можно будет выпустить в массовое производство, спроектировать и приобрести онлайн.