

- Что это?
- Почему не передатчик имеет никакой реакции при работе?
- Почему напряжение одного элемента батареи ниже?
- Основные понятия
- Почему одна из лопастей вращаются медленнее, чем другие?
- Основное
- Почему индикатор на quadcopter мигает?
- Введение
- Dm007 rc quadcopter 6 axis gyro explorer ufo | gearbest russia
- Pixelito
- Rashvinta
- Аккумулятор
- Балансировка
- В первом варианте
- Виды лопастей
- Во втором варианте
- Дальнейшее развитие и перспективы
- Дизайн
- Если сомневаешься — ставь больше пропеллеров!
- Как отличить руль лопатки?
- Как связать quadcopter и передатчик?
- Как судить рулевое управление электродвигателем?
- Как увеличить подъемную силу дрона?
- Как это работает?
- Какие популярные бренды потребительских трутней?
- Калькулятор ecalc
- Качество
- Квадрокоптер (6-axis gyro, 2.4ггц 4ch )
- Количество
- Материал
- Методы крепления и крепежи
- Мотор
- Направление вращения
- Первые блины
- Предпосылки к появлению электрического вертикального взлета
- Пропеллер
- Развитие электрического вертолетостроения
- Регулятор
- Спецификация
- Третий вариант
- Улучшения и повышение стабилизации полета
- Эластичность
- Заключение
- Вывод уравнений движения
Что это?
Квадрокоптер Himoto HI6052 — это квадрокоптер с двумя режимами полёта. Производителем этой модели является компания Himoto, которая зарекомендовала себя на рынке производства радиоуправляемых моделей. Компания известна своим качеством выпускаемой продукции, не одно устройство не покидает фабрику, если оно не прошло проверку в отделе качества. Вся продукция Himoto отличается использованием высоких технологий, ярким и запоминающимся дизайном.
Himoto HI6052 подойдет как для новичка, так и для профессионала пилотирования. Дистанционный пульт управления имеет два режима, поэтому новички могут начать тренироваться на легком режиме, а экспертам подойдет второй режим, который позволит выполнять крутые виражи, делать флипы и резкие перевороты на 360 градусов.
Особенности модели:
- Несколько вариантов окраски корпуса: красны, желтый, синий.
- Корпус коптера изготовлен из прочного ударостойкого ABS пластика.
- Размер устройства всего 31*31*6 см.
- Квадрокоптер работает от съемной литиевой батареи, которая заряжается от USB кабеля. Полностью заряженной батареи хватает до 7 минут полета и съемки.
- Подходит как для опытных пилотов, так и для новичков.
- Имеет пульт дистанционного управления, который позволяет управлять устройством на расстоянии до 100 метров.
- Подойдет для использования в помещении и на открытом пространстве.
Почему не передатчик имеет никакой реакции при работе?
1. Проверьте и убедитесь, что батареи установлены в правильной полярности;
2. Аккумулятора недостаточно, полностью зарядите аккумулятор или замените его на полностью заряженный.
Почему напряжение одного элемента батареи ниже?
Одно дисбаланс напряжения батареи сотового нормальное явление. Большой ток разряда, как правило, приводит к разности потенциалов. Это может быть вызвано плохим контактом между батареей и зарядным устройством, и клиент должен принять режим баланса заряда для зарядки аккумулятора.
Основные понятия
- «В идеальном мире» — чисто теоретическое понятие, не берущее в расчёт побочные факторы
- Параметр «длинна», это и есть длинна пропеллера. Если точнее, то диаметр окружности, описываемой лопастями
- Параметр «шаг» можно сравнить с шагом резьбы. Это то расстояние, которое может пройти винт за один оборот (по аналогии с шурупом в дереве) . Чем больше угол атаки лопасти, тем больше это расстояние.
«Угол атаки», это Угол наклона лопасти, относительно горизонтальной плоскости - «Тяга», это сила, которая создаётся винтом. Она компенсируется остальными силами реакции (сопротивление воздуха, гравитация). Из этого следует, что пока тяга больше сопротивления – коптер будет разгоняться в направлении, противоположном вектору тяги.
Почему одна из лопастей вращаются медленнее, чем другие?
1. Проверьте герметичность лезвий;
2. Отрегулируйте ключ обрезки;
3. Перемодулируйте частоту, квадрокоптер должен быть установлен на ровной поверхности;
4. Повторно откалибруйте гироскоп.
Основное
- Тут ты выставляешь основные параметры своей сборки
- Полный вес модели можно указывать «без ВМГ» (винтомоторная группа = пропеллеры и моторы). При выборе пропеллеров и моторов калькулятор сам учтёт их вес
- Количество винтов – соосные винты, это два винта расположенных друг над другом, а одноосные это один винт на одном луче коптера. Для простоты, в нижнем правом углу, калькулятор рисует тебе конфигурацию
- Размеры рамы- По диагонали, от одного конца луча, до другого
- На остальное пока можешь забить. Оно уже стоит по стандарту. Высота, температура и давление может пригодится для расчёта полётных характеристик для разных высот
Почему индикатор на quadcopter мигает?
1. Квадрокоптер неправильно привязан к передатчику, пожалуйста, обратитесь к руководству пользователя для повторной модуляции частоты;
2. Недостаточно заряда аккумулятора, зарядите аккумулятор.
Введение

Dm007 rc quadcopter 6 axis gyro explorer ufo | gearbest russia
DM007 2.4G 4CH LCD RC quadcopter 6 axis gyro explorer with 2.0MP camera
High definition 2.0MP camera allows you to record the beautiful views from the sky angle
2.4Ghz 4 channels transmitter with trimmer. Strong anti – interference performance ensures long distance control
6 – axis gyro quad – rotor aircraft flight, strong stability, easily implement various flight movements, stronger wind resistance, easier to control
2.4G technology adopted for anti-interference, more copters fly at the same time can not interfere with each other
Agile and precise 360 degree eversion for different directions such as forward, backward, left, right
2 flight speed modes (low / fast )for both beginners and experts
With cool night light, perfect for night flight
Ready to fly indoor and outdoor
Certificate: EN71 EN62115
Copter battery: Replaceable 7.4V 380mAh li-po (included)
Flying time: 6 – 8mins
Charging time: 80 -90mins
Control distance: Approx. 150m
Pixelito
Второй схемой, разрабатываемой параллельно, стала схема с вертикальным влетом моделиста из Бельгии по имени Александр. Он назвал свой вертолет Pixelito. Александр применил в нем схему, отличную от Proxflyer, у которой был лишь один несущий винт.
Стабильности ее полёта способствовало специальное устройство на винте: за неимением приемлемых по весу электронных стабилизаторов полета, на винт ставилось массивное навершие, выполнявшее при раскрутке роль гироскопа, управляющего углом атаки лопастей.
Сверху находится балансир (flybar, Bell/Hiller bar):
Как бы в последствии конструкторы ни пытались, без этой штуки вертолеты с одним винтом летать отказывались (пока не появились электронные стабилизаторы, управляющие углом атаки лопастей — flybarless схемы вертолетов). Первой же вертолетной схеме балансир был не нужен или, может быть, его функцию частично выполняло ограничительное кольцо на лопастях из бальзового дерева.
В этой модели моторчика было тоже два: для основного винта, который позволял лететь вверх-вперед, и для стабилизирующего пропеллера, с помощью которого можно было поворачивать. Модель получилась невероятно маленького размера, о чем можно судить по фото с хомячком, оно 2003 года, так что сорри за качество. Модель весила всего 6,9 грамм.
В 2003 году Александр был уже почти у создания работоспособной модели, и нашел Питера, создателя Proxflyer. Они решили объединить усилия, и таким образом довели свои модели до рабочих прототипов.
В записи от 15 Декабря 2003 года говорится:
«Сегодня мы с Питером с удовольствием представляем результат наших последних совместных разработок. Я создал вертолет Pixelito, а Питер — Proxflyer Micron (на тот момент уже не первую модель норвежца — мое примечание). Pixelito — это вертолет с моей собственной системой контроля ротора, а дизайн Питера уже довольно хорошо известен.
Мы называем их роботами, потому что такое название характеризует их лучше всего. Примерно 2 недели назад мы с Питером провели чудесные выходные у меня дома и после этого решили, что было бы неплохо вести совместные исследования, каждый у себя дома, но двигаясь к общей цели. Это вылилось в создание модели весом всего 6,9 грамм вместе с аккумулятором, и мы оба знаем, что это не предел.
Александр и Питер»
Видео только что созданного мини-вертолета Pixelito, но в ролике им управляет друг его создателя, автор Proxflyer Peter Muren. Можно догадаться, что Александр держит камеру.
Pixelito, 2003 год.
Третьим прототипом могла бы стать нашумевшая в то же самое время разработка японской фирмы Seiko Epson. Модель могла летать только вверх и вниз.
Rashvinta
Программа для расчёта параметров пропеллера для летательного аппарата.
Она может работать с тремя наборами исходных данных.
- Мощность двигателя диаметр винта, который вам нужен
- Мощность двигателя частота вращения
- Диаметр винта шаг
Аккумулятор
- Из списка выбираешь нужный, или максимально похожий аккумулятор, и состояние заряда «номинал»
- В поле «P» пишешь количество параллельно соединенных аккумуляторов (если нужно)
Балансировка
Когда ты сэкономишь на пропеллере, ты точно удивишься тому, что он не отбалансирован. Из-за этого он будет вибрировать, на камере коптера ты будешь наблюдать эффект «желе», резьбовые соединения будут ослабевать, а моторы будут изнашиваться очень быстро. Надо балансировать.
Для этого тебе понадобится:
- Пропеллер
- Скотчсупер клей (на свой страх и риск)
- Мелкозернистая наждачная бумага
- Специальный инструмент — балансировщик пропеллеров
- Уровень
- Балансировщик устанавливаешь строго горизонтально.
- Устанавливаешь пропеллер на ось, в горизонтальное положение. Отпускаешь. Одна из лопастей падает вниз.
- Берёшь наждачку, и с внутренней стороны поднявшейся лопасти (с вогнутой) снимаешь немного материала. Не переусердствуй.
- Возвращаешь лопасти в горизонтальное положение. Если одна из них падает – повторяешь предыдущий пункт. Если нет- идём дальше
- Так как балансировщик тоже не лучшего качества- переворачиваешь ось и смотришь по новой. Нужно поймать момент, когда вне зависимости от направления оси, пропеллер будет сбалансирован.
- Молодец.
- Но не совсем. Теперь ступица. Устанавливаешь пропеллер вертикально. Если пропеллер наклоняется вправо- делаешь мазок лаком на левой стороне.
- Добиваешься баланса
- Меняешь направление горизонтальной оси пропеллера. Если всё по-прежнему в порядке- ты отбалансировал пропеллер. Надеюсь у тебя не октокоптер.
- Молодец!
В первом варианте
- Галочку на «расчёт по диаметру винта»
- Вводите нужный диаметр в см
- Вводите мощность двигателя в лошадиных силах, подсмотренную в параметрах двигателя (чтоб получить лошадей из кВт используй формулу кВт*1.36)
- Вводи максимальную скорость, которую позволит развить твой винт
- Введи среднюю скорость в поле «Скорость расчётная»
- Нажми кнопку расчёт
В результате ты увидишь необходимый шаг винта и частоту вращения.
Виды лопастей
- Normal (N) – Имеют заострённые на концах лезвия. Это уменьшает тягу, но и снижает расход энергии аккумулятора
- Bullnose (BN) – Бычий нос (Закруглённые). При равном с нормальными диаметре, имеют большую тягу и площадь. За счёт тяжести ведут себя более стабильно, и увеличивают отзывчивость дрона по рысканью. Сильно повышают расход энергии акб.
- Hybrid Bullnose (HBN) – промежуточный вариант. Имеют как и преимущества, так и недостатки предыдущих.
Во втором варианте
- Убери все галочки
- Введи мощность двигателя
- Введи частоту вращения винта (двигателя, если нет редуктора)
- Введи максимальную и среднюю скорости
На выходе ты получаешь диаметр винта в сантиметрах и шаг винта.
Дальнейшее развитие и перспективы
Благодаря совершенствованию бортовой электроники и использованию модулей GPS, модели научились удерживать свое положение в пространстве и постоянную высоту. На мультикоптеры стали ставить телеуправление, которое по-английски называется FPV — First Person View, вид от первого лица.
Проводятся гонки на мультикоптерах, чему способствует система управления с видом от первого лица.
Гонки на дронах с управлением с FPV, 2020 год
Позже одна компания при каком-то технологическом институте стала разрабатывать систему автоматического контроля не одного, а множества мультикоптеров и добилась впечатляющих результатов: они не только смогли заставить летать рой электрических устройств по заданным траекториям, не сталкиваясь.
Голограмма из дронов, 2020 год
Уже в 2020 году построили прототип мультикоптера, способного поднять над землей человека. Сейчас это направление активно развивается. Ведь для перевозки людей здесь есть преимущества перед вертолетами. Это и удобство управления, и более компактные размеры, и электричество в качестве топлива, и безопасность из-за наличия нескольких пропеллеров вместо одного-двух.
Первый мультикоптер с человеком на борту, 2020 год
Устройство дронов продолжает совершенствоваться, для них появляется все больше сфер применения. Мультикоптеры совершенствуют многие авиапроизводители, включая Boeing. Да что там Boeing — сама Почта России уже во всю экспериментирует с доставкой грузов по воздуху.
Полет на квадрокоптере с видом от первого лица, от которого захватывает дух, 2020 год.
Возможно, скоро нас ждут аэротакси, огромные пространственные трехмерные скульптуры из дронов на любом большом празднике, доставка посылок и корреспонденции вне зависимости от того, где вы находитесь, а пиццы — всего лишь за три минуты!
Дизайн
Компания Himoto славится своей любовью к яркому запоминающемуся дизайну. Модель Himoto HI6052 не исключение. Разработчики подарили летающему гаджету очень эффектный дизайн с контрастной окраской, которую заметно даже из далека. Модель имеет три цветовых решения: черно-красный, черно-желтый, черно-синий.
Пропеллеры мягкие и гибкие, имеют дополнительную съемную защиту. В комплектации устройства есть запасные винты, на случай повреждения. Квадрокоптером чрезвычайно удобно пользоваться ночью, так как он оборудовано яркой светодиодной подсветкой, поэтому не потеряется из виду.
Если сомневаешься — ставь больше пропеллеров!
Почти сразу после появления моделей вертолетов начались попытки создания многопропеллерных, если можно так выразиться, машин.
Чем больше пропеллеров было в модели, тем труднее было согласовывать их работу. Тот же вертолет Chinook с картинки выше, без гироскопа колбасило при полете так, что становилось сомнительным применение двух пар винтов. Для полета же моделей с тремя и более количеством двигателей требовалась электроника, на порядок сложнее вертолетной.
Поначалу стали экспериментировать с количеством электромоторов. Это сейчас почти всегда ставится знак равенства между дроном и квадрокоптером, но на заре их появления было совсем не так.
Изначально многомоторные модели собирали исключительно энтузиасты. Почти сразу же возникла идея ставить на модели компактные камеры, которых в то время было не много, а GoPro появилась уже позже, и удачно вписалась в тренд. Камеры собирали из собственноручно припаянных контроллеров к камерам от мобильных телефонов и так далее.
Конструкторы мультикоптеров подбирали материалы для их рам, экспериментировали с разными электродвигателями, стали паять различные модули для согласованного управления пропеллерами, писать для этого ПО и обмениваться удачными находками друг с другом. Получалось с переменным успехом.
Пока не было надежной электроники для согласования моторов и не появились миниатюрные гироскопы, смотреть на полеты таких устройств жутковато. Здесь были и поломанные рамы, и потерянные видеокамеры, и утонувшие в водоемах дорогостоящие электронные модули. Однако год от года стабильность, дальность полета, простота управления и качество снимаемых видео постоянно возрастали.
Появились коптеры с двумя, тремя, четырьмя, пятью, шестью, восемью и более пропеллерами — соответственно, бикоптеры, трикоптеры, квадро-, пента-, гекса- и октакоптеры.
Один из первых трикоптеров, 2020 год
И вот, после долгих экспериментов, модели стали уже летать стабильно. Можно было не бояться, что она завалится в воздухе на бок или что вибрация при полете будет мешать управлению.
Бикоптер
Поначалу все ставили себе столько пропеллеров, сколько хотели, но позже каждой схеме, все же, нашлось свое применение.
Пролет квадрокоптера с камерой GoPro Hero 3 на борту через фейерверк, лучше смотреть в HD, 2020 год
Машины с тремя и четырьмя моторами стали чаще применяться для развлекательных полетов, для съемки видео, а увеличенное число пропеллеров пригодилось в коптерах для перевозки грузов, а также в тех случаях, когда от мультикоптера требуется надежность. Ведь если при отказе одного из моторов в модели вертолета неизбежно происходит его крушение, то в случае моделей с несколькими двигателями нагрузку вышедшего из строя мотора можно распределить на другие и удержать машину в воздухе.
Октакоптер, специально предназначенный для перевозки грузов, 2020 год
Как отличить руль лопатки?
Лезвия, как правило, обозначены А, В или направляющих лопатках Р. Диагональные имеют одинаковое управление, смежные лопасти имеют противоположное рулевое управление.
Как связать quadcopter и передатчик?
Сначала включите выключатель питания Quadcopter, поместите его в горизонтальном положении, а затем включите передатчик. Нажмите левую дроссельный рычаг в крайнее верхнее положение, а затем вытащить его обратно в крайнее нижнее положение. Вы услышите четкий «ди, ди» звук и индикатор перестанет мигать и просто горит постоянно, то есть регулировка частоты завершена и ваш Quadcopter готов взлететь.
Как судить рулевое управление электродвигателем?
1. Обычно двигатель с красными и синими проводами обычно представляет собой передний двигатель, в то время как реверсивный двигатель имеет черно-белые провода. Двигатели диагонального направления имеют одинаковое рулевое управление, соседние двигатели имеют противоположное рулевое управление.
2. На поверхности двигателя иногда можно найти CW или CCW. CW обозначает передний двигатель, в то время как CCW обозначает реверсивный двигатель.
Как увеличить подъемную силу дрона?
Как увеличить подъемную силу дрона?
Мои ответ будет касаться беспилотных, летательных, роторных дронов, а также коптеров с произвольным количеством винтов (мультикоптер), далее – коптер.
Подъёмную силу коптера можно увеличить на 10% (цифра получена экспериментально) за счёт установки на коптере плоского аэродинамического экрана. Причём, увеличение подъёмной силы будет проявляться, как при движении коптера, так и при зависании коптера на одном месте.
Привожу рисунок размещения плоского аэродинамического экрана на коптере.
Привожу рисунок воздушных потоков вокруг плоского аэродинамического экрана.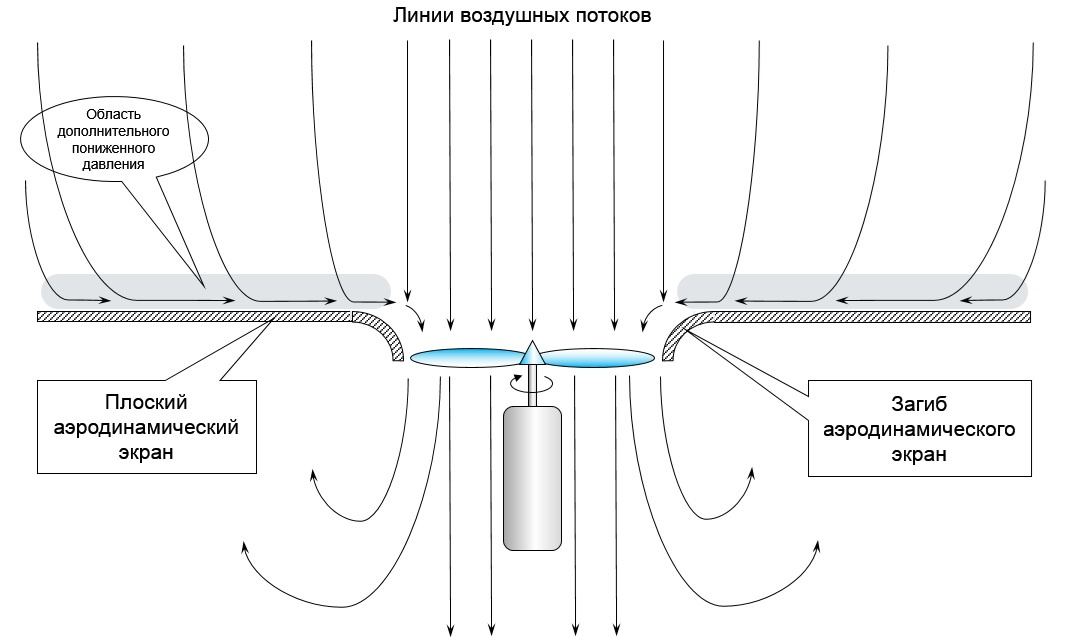
Суммарная площадь отверстий в аэродинамическом экране должна быть близка к площади поверхности аэродинамического экрана, не занятого отверстиями (зависимость получена экспериментально).
Больший эффект увеличения подъёмной силы (на 12%, цифра получена экспериментально) достигается при использовании изогнутого экрана. Привожу рисунок изогнуто аэродинамического экрана.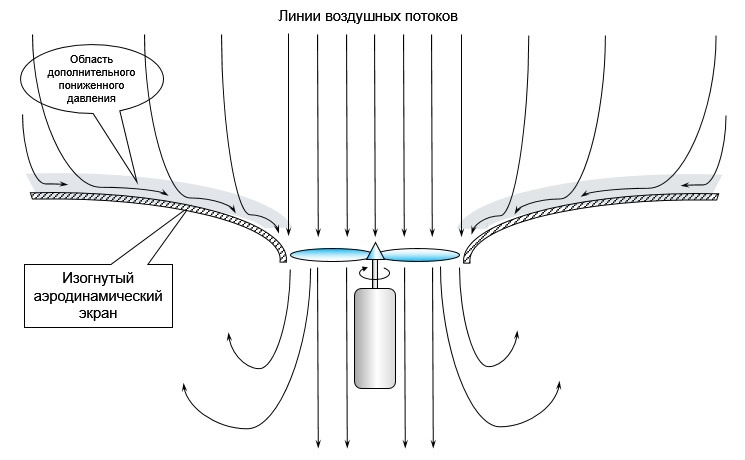
Объясняется данное явление законом Бернулли, в соответствии с которым происходит понижение давление в газовом потоке при увеличении скорости данного газового потока (показано на рисунке).
Т.е. над аэродинамическим экраном устанавливается постоянное пониженное давление за счёт постоянного оттока воздуха с поверхности аэродинамического экрана в отверстия, в которых вращаются винты. Таким образом, дополнительная подъёмная сила (плюс 10…12%) появляется за счёт пониженного воздушного давления над поверхностью аэродинамического экрана.
Как это работает?
Для старта работы подзарядите съемную батарею через USB кабель, это займет примерно 100-120 минут, подключите ее к устройству и оно будет готово к полету. Управление происходит с помощью специального пульта управления, который имеет два режима:
- Стандартный — идеально подойдет для детей и новичков, тех кто первый раз держит устройство в руках. Встроенный гирокоптер обеспечит стабильный и мягкий полет, защита пропеллеров поможет устоять коптеру перед препятствиями и неудачными посадками, которые часто случаются при первых тренировках. С него можно начать использование устройства, а потом уже перейти ко второму режиму.
- Продвинутый — этот режим специально создан для профессионалов своего дела, кто занимается пилотированием далеко не в первый раз. Он позволяет быстро набирать скорость, делать крутые повороты, кувырки на 360 градусов.
Himoto HI6052 идеально подойдет как модель для начинающих, так и для опытных любителей полетов.
Какие популярные бренды потребительских трутней?
Игрушка дроны многочисленны, и вы можете найти лучшие продавцы среди этих марок: JJRC, SYMA, Cheerson, TKKJ, я Drone, FQ777, GTeng, JXD, WLtoys …
Калькулятор ecalc
Крайне удобный калькулятор, которые находится на официальном сайте Ecalc. В нём ты сможешь задать те запчасти, которые будешь использовать для своего проекта, а он выдаст тебе (очень) примерную модель поведения коптера.
Давай рассмотрим его поближе, так как он тебе точно пригодится.
Качество
Как правило, чем дороже, тем качественнее. Тут может быть много параметров. Основной, это балансировка. Качественный пропеллер балансировать не придётся. Так же важным моментом является качество материала.
Пластик может быть упругим и эластичным, а может быть мягким и НЕ эластичным. С этим нужно быть внимательным. Не смотря на кажущуюся простоту, от качества лопастей напрямую зависят лётные качества коптера.
Квадрокоптер (6-axis gyro, 2.4ггц 4ch )
Почему стоит заказывать радиоуправляемую модель именно у нас?
Первая причина: Мы являемся официальными дилерами всех известных брендов радиоуправляемых моделей. Мы гарантируем, что ваша модель будет оригинальная на 100 процентов.
Вторая причина: Каждая модель перед отправкой проходит осмотр в сервисном центре на предмет брака. Только после этого товар передается на упаковку. Редкие магазины осуществляют предварительную проверку. Мы ценим наших клиентов и их время!
Третья причина: Ваша посылка упаковывается в дополнительную коробку, что обеспечивает ей сохранность при транспортировке в ваш город.
Четвертая причина: В нашем магазине работают грамотные специалисты, которые знают все нюансы выбора радиоуправляемых машин, квадрокоптеров и других моделей. Если у вас возникают трудности в выборе модели, мы обязательно подскажем вам, какая лучше и почему. Многие выбирают модели исходя из отзывов на различных форумах и социальных сетей. Мы не рекомендуем этого делать по одной простой причине. По нашим наблюдениям, 80 процентов тех, кто пишет комментарии, никогда не держали их в руках! очень часто комментарии оставляют дети. Вы можете прочитать отзывы людей, примерно понять в чем особенности, достоинства и недостатки той или иной модели. После прочтения различный статей и комментариев, чтобы не запутаться в выборе, рекомендуем обязательно проконсультироваться с нами.
Пятая причина: Мы всегда идем на встречу клиентам. В нашем магазине низкие цены и быстрая доставка. Всегда есть запчасти на радиоуправляемые модели любых брендов представленных в России. Если вы не нашли нужную запчасть в каталоге, напишите нам артикул. После проверки на складе, мы сообщим вам о наличии или отсутствии необходимой вам детали или модели. Если вы где-то нашли радиоуправляемую модель дешевле чем у нас, сообщите нам и мы постараемся сделать вам хорошую скидку!
Количество
Количество лопастей винта влияет на подъёмную силу, стабильность и отзывчивость коптера (в идеальном мире). Чем больше лопостей, тем эти параметры лучше. На самом деле, многолопастные пропеллеры (2 ) ставятся только на мелкие дроны. Это происходит из за дороговизны изготовления и сложности балансировки. В большом размере отбалансировать 4 лопасти очень дорого.
Чем их больше, тем стабильнее БПЛА. Малое количество негативно сказывается на управляемости.
Материал
Пластик – наиболее популярный, но не самый удачный вариант. Пластиковые пропеллеры обладают низкой ценой и очень широки ассортиментом. Обладают разной, но в основном высокой гибкостью и мягкостью. Якобы это увеличивает их устойчивость к механическим повреждениям.
Углеродное волокно – Очень дорого, но очень круто. Великолепная жёсткость, лёгкость. Легко сбалансировать. Это значит, что брака будет меньше. Не теряет форму. Да и наличие чёрных лопастей всегда радует глаз. К ним рекомендуется докупить защиту лопастей для квадрокоптера, ибо их очень легко расколоть.
Композит – внутри пластик, снаружи покрытие из углеродного волокна. Дешевизна пластика, жёсткость и износостойкость (почти) как у карбоновых пропеллеров. Также не очень высокая цена.
Методы крепления и крепежи
Пропсейвер – Хороший вариант для проведения экспериментов, когда надо часто снимать и надевать пропеллер. Выглядит как втулка, которая притягивается к валу двигателя двумя винтами. Сам пропеллер надевается сверху, и притягивается резинками к выступающим винтам. Далеко не полетит, но можно побаловаться.
Цанговое крепление – рабочий вариант. На вал насаживается цанга (та, что с прорезями), потом зажимная втулка, пропеллер и шайба. Крепление надёжное и идеальное для полётов.
Outranner – Это не крепление, это разновидность бесколлекторного мотора, в котором ротор (вращающаяся часть) находится снаружи. На их верхней поверхности обычно находится несколько резьбовых отверстий, в которые крепится переходник (коих несметное количество).
Мотор
Выбираешь производителя мотора из списка, и проверяешь по параметрам. Если похоже, то всё нормально, если нет, то продолжаешь «Охлаждение»
Направление вращения
Для электродвигателей есть два направления вращения. CW – вращение вала по часовой стрелке, CCW – вращение вала против часовой стрелки. Направления нужно или чередовать (так как каждый пропеллер создаёт реакционную силу, которая стремится развернуть то, к чему он прикреплён, в направлении вращения), или размещать соосно на одном луче (тогда реакционная сила одного компенсирует оную у второго. Это более сложная компоновка. Используется, к примеру, на вертолёте «чёрная акула»).
На направление вращения самого пропеллера указывает поднятая кромка. Она смотрит в сторону вращения.
Первые блины
Первыми попытками создания коммерческих электрических моделей стали Kalt Whisper и Kyosho EP Concept. Конструкторам некоторых из фирм-производителей девайсов для хобби удалось так подобрать вес и другие характеристики компонентов, чтобы эти первые вертолеты, еще на старых коллекторных моторах, смогли отрываться от земли.
Производство Kalt Whisper и Kyosho EP Concept наладили примерно в 1991 году. Чуть позже в воздух поднялись изделия немецкой фирмы Icarus с именами ECO 8 и ECO 16 (1995). Наиболее продвинутой стала модель GWS Dragonfly, но и появившаяся уже позже, примерно в 1998.
Однако, у первых электрических моделей вертолетов присутствовала куча неразрешимых проблем. Маломощные электродвигатели не позволяли набирать высокую скорость подъема и передвижения в горизонтальной плоскости. От старых тяжеленных никель-кадмиевых аккумуляторов с 7-8 «банками» и невысокой удельной ёмкостью удавалось добиться от 4 до 12 минут полета.
Kalt Whisper, рекламное видео 1991 года
Основной проблемой стала дороговизна в магазинах и просто непомерная цена ремонта. Пилотировать эти модели хотя бы кое-как становилось возможным только после нескольких недель упорных тренировок.
Предпосылки к появлению электрического вертикального взлета
Еще пятнадцать лет назад в небе среди компактных летающих устройств можно было наблюдать только самолеты и вертолеты с двигателями внутреннего сгорания.
И во всем мире, и в СССР основой авиамоделизма неизменно выступали самолеты. Это были кордовые, неуправляемые и радиоуправляемые модели. Про модели вертолетов ходили только слухи, кто-то хвалился, что смотрел на полет такого, но им не верили, и никто радиоуправляемые вертолеты в глаза толком не видел.
Конкурс радиоуправляемых вертолетов 1982 года в СССР
У моделей самолетов с авиадвигателями, работающими не на топливе, а от электричества, дело обстояло получше, но для вертолетостроения электромоторы на протяжении более ста пятидесяти лет, с самого момента их появления, были абсолютно непригодны. Вертолеты на видео 1982 года тоже имеют ДВС-двигатели, и все они были полностью самодельные.
Вертолетомодельной промышленности просто не существовало, так что все, из чего сделаны вертолеты на видео, было подобрано с огромным трудом от других моделей и электроприборов, было выпилено, выточено и склеено вручную.
Пропеллер
- Выбираешь тип пропеллера из списка. Угол кручения (угол атаки), диаметр винта и его шаг ты узнаешь из спецификации
- Передаточное число используешь, если твой пропеллер присоединён к мотору через редуктор
Всё, можно нажимать «рассчитать», и наслаждаться результатами с 15% погрешностью. Я не зря сказал о погрешности. Все эти расчёты годятся только для того, чтоб прикинуть – полетит, или нет. Более точной информации ты не получишь.
Если в списках нет нужной позиции, то можно воспользоваться строкой Custom, и ввести всё самостоятельно.
Развитие электрического вертолетостроения
С появлением летающих прототипов идею подхватили и другие производители игрушек, и, используя новые двигатели, аккумуляторы и подобрав более современный и легкий пластик, стали производить модели вертолетов одну за другой, сначала по норвежской схеме, ну а потом и по подобию Pixelito, по-моему, первые серийные модели так и назывались — Pixelito.
Вертолет одной из первых моделей по схеме, аналогичной Proxflyer, фирма Syma, 2007 год
Также одна из первых моделей английской фирмы Fastek Computers, 2007 год
Поначалу вертолеты были, в основном, соосные. Одним из самых плодовитых на тот момент производителей игрушечных радиоуправляемых вертолетов была китайская компания Syma. Авиамоделисты из всех стран также вовсю пробовали разные варианты построек моделей с вертикальным взлетом, и некоторые их достижения были довольно-таки выдающимися, но то, что быстрее всего дошло до конечного потребителя — это продукция фирм-производителей игрушек.
Одна из первых моделей по схеме Pixelito, 2-канальная, лишь с балансиром, 2008 год
В результате как норвежский, так и бельгийский моделисты неплохо заработали на продаже прав на производство вертолетов на дистанционном управлении, сделанных по их схемам.
В последствии разработками Питера заинтересовались DARPA и норвежское Министерство Обороны, инженер создал свою фирму Prox Dynamics и стал разрабатывать вертолет-шпион для военных целей.
Что сейчас там происходит и на какой стадии находится производство, неизвестно.
Регулятор
- Из списка выбираешь свой регулятор скорости
- В навесном оборудовании пишешь суммарное потребление и вес всей той фигни, что ты хочешь повесить на свой дрон. Камера, диоды, сервоприводы, мелкокалиберные орудия. Если ты уже указал их вес в основном весе модели, то поле вес оставляешь с нулём
Спецификация
Есть два типа обозначений.
LLPPxB
- L- длинна
- P- шаг
- B- количество лопастей (для двух лопастей может не указываться)
Например, 5045×3 – длина 5 дюймов, шаг 4.5 дюйма, 3 лопасти.
Иногда приходится гадать. Тот же пропеллер может обозначаться 0545×3.
LxPxB
Например, 5×45х3 – длина 5 дюймов, шаг 4.5 дюйма, 3 лопасти.
Иногда в конце присутствует буква R или C. Она определяет направление вращения пропеллера.
- R – по часовой стрелке
- C – против часовой стрелки
Иногда в конце присутствует обозначение профиля лопасти. (подробнее смотри выше «виды лопастей»)
- N – нормальная (заострённая)
- BN – закруглённая
- HBN – промежуточная
Третий вариант
- Установи галочку в «указать параметры винта»
- Введи диаметр винта и шаг винта
- После нажатия на кнопку расчёт, программа рассчитает профили сечения винта (форма лопастей) на различных радиусах от центра. Результат ты получишь в окне просмотра, и в виде таблицы Date.html в каталоге программы.
- Кнопками со стрелками просматриваешь сечения на различных радиусах, а ползунком меняешь масштаб.
Как ты можешь заметить, подбор и корректировка пропеллеров, это важное и не самое простое занятие. Однако, настоятельно рекомендую уделить этому время. Даже в такой, на первый взгляд, неуклюжей корове, как квадрокоптер, есть место аэродинамике. К тому же это может сэкономить тебе очень много денег на моторах.
Конечно, всё вышесказанное достаточно ситуативно. К примеру, если ты собираешь маленький дрон, или просто хочешь попробовать, то пропеллеры можно использовать и самые дешёвые, и не отбалансированные.
Это вряд ли помешает твоему дрону взлететь, да и ты сразу поймёшь, что не так, и на что нужно впредь обращать больше внимания.
Так же крайне не рекомендую начинать с соосной компоновки, если ты не знаком с миром беспилотной авиации. Там есть куча нюансов, которые базируются на более глубоком понимании темы. Идеальным вариантом для начала будет четырёх лучевая, квадратная компоновка.
Ну и нужно понимать, что если ты не крутой инженер, с богатым набором закрытых САПР программ, то всё, что ты можешь рассчитать – мало тебе поможет.
Все эти вычислительные решения дают крайне ориентировочный результат. Так что я рекомендую тебе побольше экспериментировать, хотя помощью софта пренебрегать тоже не стоит. Пробуй, учи матчасть, когда-нибудь получится очень круто!
Уф… Я старался, клавиатуру до стола стёр, выпил ведро кофе. За это ты можешь наградить меня, и поделиться этой статьёй, при помощи кнопок внизу. А если хочешь почаще узнавать что-то новое и полезное, то подписывайся на нас в социальных сетях. Удачи, пилот!
Улучшения и повышение стабилизации полета
В то время как первые игрушечные вертолеты имели всего 2 канала управления (вперед-вверх и поворот лишь в одну сторону), любители для себя делали и модели на многоканальном радиоуправлении. Чтобы управлять самыми первыми моделями дистанционно управляемых вертолетов, требовалась довольно долгая тренировка, поскольку ровно удержать его в воздухе было довольно трудно, и многое зависело от мастерства пилота.
Для самых простых игрушечных вертолетов вместо радиоуправления применялось управление по инфракрасному излучению. В более продвинутых моделях — по радиоканалу. В дешевых моделях оно было двухканальным, чем дороже — тем каналов управления становилось больше.
В самых дешевых моделях на смену двухканальному управлению добавили третий, и управление стало больше походить на полноценный полет. Вот только держаться в воздухе, несмотря на множество каналов, было все еще непросто.
Обратите внимание, как трудно пилоту совладать с удержанием модели на месте:
Одна из первых моделей вертолетов, схема типа Pixelito, 2007 год.
Появление миниатюрных гироскопов значительно улучшило эту ситуацию. После добавления в модель этого устройства полет становился прямо непривычно стабилен, не надо было постоянно держать пальцы на клавишах управления. Однако такие модели стоили гораздо дороже, чем вертолеты без гироскопа. Гироскопы стали применяться и в моделях вертолетов с ДВС.
Видео про модели вертолетов с гироскопами, 2020 год
Самой популярной из моделей с гироскопом для массового покупателя была модель Syma S107, ну а самыми надежными, выдерживавшими прямые столкновения со стенами, зубы котов и бесконечные тараны мебели, наверное, являлись вертолетики фирмы Himoto.
После своего появления, новые устройства стабилизации стали ставиться и на самые первые модели электровертолетов. В магазинах появились наборы для модернизации Kalt Whisper, Kyosho EP Concept, Icarus ECO 8 и 16 и GWS Dragonfly. На тех же самых вертолетах, после установки гироскопа, литий-полимерных аккумуляторов и легких и мощных бесколлекторных двигателей стало возможно не только нормально летать, но и даже заниматься аэробатикой.
Демонстрация возможностей электровертолета с гироскопом, 2020 год. А ваш квадрокоптер так умеет?
Эластичность
Эластичность пропеллера улучшает устойчивость оного к перегрузкам и механическому воздействию (не путать с мягкостью).
Заключение
Пост получился несколько некрасивым.
Подскажите, пожалуйста, он-лайн редактор формул? А то эти совсем отвратно смотрятся.
Вопросы-предложения приветствуются!
Вывод уравнений движения
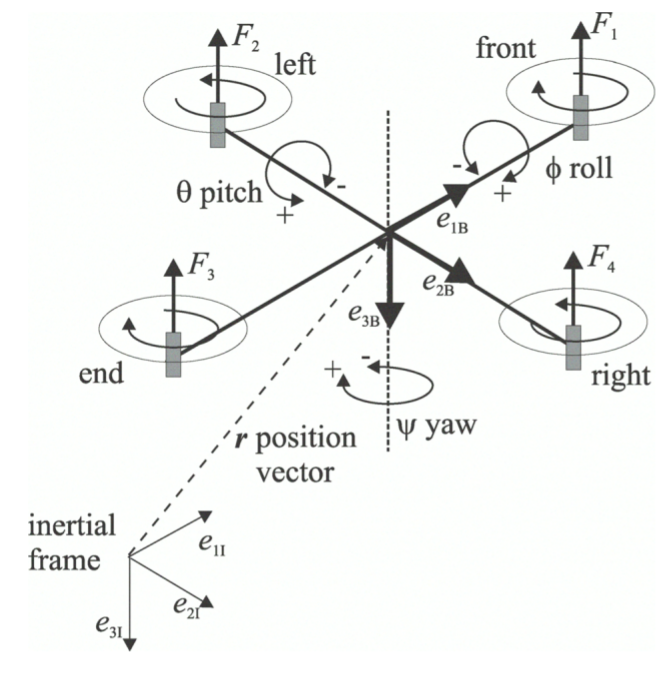
Ориентация квадрокоптера в пространстве задается тремя углами: рысканья —
ψ
, тангажа —
θ
, крена —
φ
Они вместе составляют вектор
Позиция устройства в инерциальной система отсчета задается радиус-вектором
Матрица перехода из системы координат квадрокоптера в инерциальную систему координат имеет следующий вид
Сила тяги, производимая каждым из четырех двигателей равна
Здесь
ωi
− угловая скорость двигателя, а
b
– коэффициент пропорциональности.
Теперь мы можем записать дифференциальное уравнение, описывающее ускорение квадрокоптера по вертикальной оси.
Сразу же запишем второе дифференциальное уравнение

Здесь
I
– матрица инерции,
M
– вращающий момент, приложенный к квадрокоптеру,
MG
– гироскопический момент.
Вектор
M
задается следующим образом:
Здесь
d
— коэффициент лобового сопротивления,
L
– длина плеча.
Гироскопические моменты, вызванные поворотом объекта с вращающимися роторами двигателей записываются так:



Эта система из 9 уравнений как раз и описывает динамику системы.

 (LiPo) - 94182PRO")





