

- Основные настройки в mission planner – apm copter team
- Condition-delay
- Condition-distance
- Condition-yaw
- Date january 19th, 2023 author vitaly agapov
- Do-change-speed
- Do-jump
- Do-repeat-servo
- Do-set-cam-trigg-dist
- Do-set-home
- Do-set-roi
- Do-set-servo
- Flight modes
- Loiter_time
- Loiter_turns
- Overview¶
- Rally points creation¶
- Return-to-launch
- Spektrum dx8 (alternate method)¶
- Transmitter configuration¶
- Spektrum DX8 (alternate method)¶
- Как настроить дополнительный тумблер на mission planer. полетные режимы
- Калибровка регуляторов оборотов моторов
- Настройка кривой газа
- Подготовка передатчика turnigy 9x
- Пробное включение
- Точка / waypoint
Основные настройки в mission planner – apm copter team
После сборки и установки всех комплектующих на коптер, приступаем к настройке программной части контроллера. Настройка осуществляется в программе Mission Planner.
На данный момент мы уже знакомы с контроллером, а именно, мы уже знаем как проверить контроллер перед первым включением, знаем как подключаться к контроллеру программой Mission Planner. Уже у нас установлена летная прошивка, организовано питание платы, подключены модули GPS и телеметрии, подключены моторы и регуляторы, все это установлено на раме, откалибрована аппаратура радиоуправления.
Далее нам предстоит выполнить ряд настроек в Mission Planner, без которых первый полет осуществлять нельзя. В эти настройки входит:
- первоначальная настройка (выбор конфигурации рамы, калибровка акселерометра)
- выбор встроенного или внешнего компаса, его настройка и калибровка
- выбор основных полетных режимов
- настройка FailSafe
Ничего сложного в этих процедурах нет и, если до этого момента все сделано правильно, то проблем возникнуть не должно.
Если вы нашли ошибку на странице, то нажмите Shift Enter или нажмите здесь, чтобы уведомить нас.
Condition-delay

Существует возможность задержки до начала следующей команды “делать” в секундах. В приведеном выше примере
команда №4 – установление “точки интереса” (у Do-Set-ROI) задерживается на 5 секунд так, что бы выполнить её, когда аппарат идет к путевой точке 2.
Примечание: эта команда не останавливает квадрокоптер.
Параметры:
Time (sec) – время в секундах, что бы задержать следующую команду “действия”.
Condition-distance
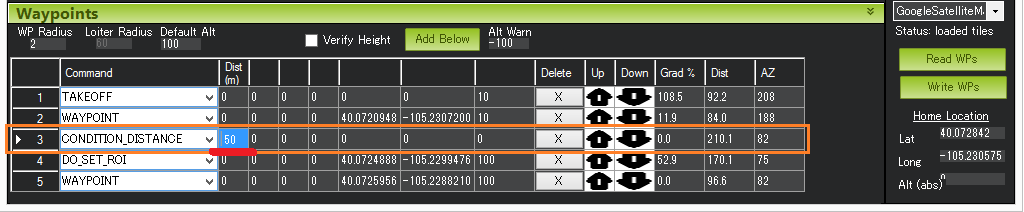
Задержка следующей команды “делать” пока квадрокоптер не находиться в пределах указанного количества метров следующей точки.
В приведенном выше примере команда 4 (Do-Set-ROI) задерживается так, что она начинается после того, как
квадрокоптер находиться в пределах 50 метров от точки 5. Примечание: эта команда не останавливает квадрокоптер во время миссии.
она только влияет на команды “Do”.
Параметры:
Dist (m) – дистанция в метрах, как близко должен находиться квадрокоптер до следующей точки, что бы выполнить команду “делать” (она же “Do”).
Condition-yaw

Эта команда направляет нос квадрокоптера на указаное направленик, когда он идет до следующей точки.
Параметры:
Deg – желаемое направление в градусах (0 = север , 90 = восток и т.д.)
Sec – не поддерживается – предназначена для ограничения скорости вращения (градусы в секунду) когда квадрокоптер поворачиваеся на
желаемое направление.
Dir (1=CW, -1=CCW) – не поддерживается. предпологает возможность контроля вращения квадрокоптера влево или вправо. Он всегда
будет поворачиваться в направлении, которое наиболее быстрое к его цели.
rel/abs – позволяет задать головное направление (т.е. Deg) как обсолютное направление (если “0”)
или по отношению к текущему курсу (если “1”)
Date january 19th, 2023 author vitaly agapov
 Квадрокоптер собран и почти готов к полёту, нужно только выполнить несколько подготовительных действий, про которые тут и пойдёт речь. Паяльник, мультиметр и прочие полезные штуки могут отправляться обратно на антресоль. А понадобится лишь компьютер (к сожалению с Windows на борту) и провод с microUSB для подключения полётной платы к этому компьютеру.
Квадрокоптер собран и почти готов к полёту, нужно только выполнить несколько подготовительных действий, про которые тут и пойдёт речь. Паяльник, мультиметр и прочие полезные штуки могут отправляться обратно на антресоль. А понадобится лишь компьютер (к сожалению с Windows на борту) и провод с microUSB для подключения полётной платы к этому компьютеру.
Do-change-speed

Команда позволяет изменить горизонтальную скорость (в метрах в секунду) у квадрокоптера.
Параметры:
speed m/s – желаемая максимальная скорость в м/сек
Примечание: В конфигурации Arducopter 3.1.2 и ранее изменение скорости вступит в силу после того, когда команда навигации (т.е. команда путевой точки) завершиться.
В версии 3.2 квадрокоптер сразу изменит скорость
Do-jump

Позволяет перейти к команде заданное число раз, прежде чем продолжить миссию. Пример выше даст квадрокоптеру команду полета обратно на
точку 1 и 2 в общей сложности 3 раза, прежде чем он полетит до точки 4.
Параметры:
WP # – номер для перехода выпонения команды миссии
Repeat – максимальное количество выполнение команды. значение -1 означает бесконечное повторение.
Примечание: эа команда не должна использоваться на прошивке 3.1.2 или ранее (она правильно работает на прошивках ArduCopter 3.2)
Do-repeat-servo

Команда позволяет многократно двигать сервоприводом назад и вперед между его
средним положением и заданным значением ШИМ. В приведенном выше примере сервопривод крепиться к 8 каналу выхода APM
и будет установлено значение 1700 ШИМ, после 4 секунд вернется в среднее положение (по умолчанию это 1500,
который устанавливается параметром RC8_TRIM) после следующих 4 секунд он будет снова перемещен в значение
1700. В конце после 4 секунд он будет перемещен назад в среднее значение.
Параметры:
Ser No – выходной канал сервопривода.
PWM – значение ШИМ для вывода на сервопривод.
Repeat # – количество раз, что бы переместить сервопривод до указанного значения.
Delay (s) – задержка в секундах между каждым движением сервопривода.
Do-set-cam-trigg-dist

Активизирование затвора камеры на основе расстояния. Например эта команда выше заставит работать затвор камеры, что бы запускать его после каждого 5м, которые
летит квадрокоптер.
Параметры:
Dist (m) – интервал растояния в метрах.
Примечание: В конфигурации ArduCopter 3.1.2 и раньше эта команда не может быть отключена. Камера будет продолжать срабатывать несколько раз
даже после того, как миссия была окончена. В версии прошивки 3.2 и выше установление значение равное нулю остановит затвор камеры от ключения.
Do-set-home

Эта команда изменит исходное положение, которое используется для возращения на старт (“Home” так же используется оригинальное положение для всех расчетов навигации).
Параметры:
Current(1)/Spec(0) – если задано “1” – использует текущее место положение в качестве нового “дома”, если “0”
использует указаную широту и долготу (см. на картинку, где пока нет описания!)
Lat, Lon – широта и долгота цели.
Примечание: В версии конфигурации ArduCopter 3.1.2 и раньше не используйте эту команду! В версиях 3.2 и выше она может быть использована
для задания местоположения RTL , хотя трудно представить себе, почему это надо.
Do-set-roi

Головное направление квадрокоптера и “подвеса камеры”
будет направленно на “область интереса” , она же ROI
В приведенном выше примеры нос и камера будут направлены на красный маркер на период выполнения команд, когда
квадрокопер летел из путевой точки 1 к путевой точке 3. Если вы хотите, что бы носовое направление / камера смотрели
на красный маркер при полете от 3 до 4 точки – вам потребуется вторая команда DO_SET_ROI , которая должна идти после
команды полета к точке 3.
Параметры:
Lat, Lon – ширина и долгота цели.
Alt – целевая высота над “домом” в метрах.
Do-set-servo

Перемещение сервопривода до конктерного значения ШИМ (PWM). В приведенном выше примере сервопривод подключен к 8 каналу
и будет установлен 1700 PWM (обычно значения в диапазоне от 1000 до 2000)
Параметры:
Ser No – выходной канал сервопривода.
PWM – значение ШИМ для вывода на сервопривод.
Flight modes
Здесь можно настроить режимы полёта квадрокоптера. По умолчанию всё настроено на использование режима Stabilize, в котором ArduCopter будет пытаться всегда удерживать себя в горизонтальном положении (при нейтральном положении всех стиков кроме газа).
Для управления режимами полёта используется 5-й канал платы. Само собой, радиоканал подключить туда можно любой, но логично подключить тоже пятый. Всего можно настроить 6 режимов для разных значений PWM, но если использовать тумблеры с чётким переключением положений (понятно, что у потенциометра можно сделать и больше шести положений, но пользоваться им будет нелегко), то получится настроить только два режима.
Или три, если есть трёхпозиционный тумблер. На Turnigy 9X он есть, но с сюрпризом – почему-то этот тумблер нельзя настроить на AUX-канал в стоковой прошивке. Скорее всего победить проблему можно, залив в аппу приличную прошивку типа ER9X, но это проверим попозже.
В стоковой же прошивке в режиме вертолёта для AUX-каналов доступны только 5 элементов управления: THRO HOLD, GEAR, PIT TRIM, HOV THR, HOV PIT.
Вот тут на картинке эти пять рычагов отмечены красным цветом. С ними и придётся работать.
Конечно, непосредственно для вертолётов у этих переключателей и потенциометров своё предназначение: управление кривой шага для настройки точки висения, выпускание шасси (gear) и т.д.
Раз уж произошло такое лирическое отступление, то перечислю ещё сами полётные режимы. Подобную информацию можно прочитать в официальной документации ArduPilot, вкратце они выглядят так:
У режимов есть два чекбокса с модификаторами Simple Mode и Super Simple Mode. Первый включает такой режим, при котором коптер всегда движется вдоль одного направления, в котором он находился при старте (задействуя компас). То есть даже если он повернулся, скажем, на 90 градусов вправо, стик тангажа заставит его лететь в прежнем направлении, то есть уже левым бортом (креном).
Второй режим (Super) уже использует GPS и пересчитывает направление в зависимости от координаты места старта. Находясь далее, чем в 10 метрах от старта, тангаж заставляет коптер летать вперёд-назад по радиусу от места старта, а крен – летать по окружности с центром в месте старта (по орбите).
Loiter_time

Квадрокоптер будет летать и ждать в указанном месте указанное количество секунд.
Это миссия эквивалентна режиму Loiter.
Параметры:
Times / Время – количество секунд, что бы оставаться на месте.
Lat, Lot – координаты ширины и долготы цели.
Alt / высота – целевая высота над “домом” в метрах. Если оставить равную нулю
то квадрокоптер будет сохранять текущую высоту.
Loiter_turns
Выполнение этой миссии эквивалентно полетному режиму Circle.
Квадрокоптер будет летать вокруг указанной точки (по координатам ширины, долготы и заданной высоты в метрах).
Радиус окружности задается параметром CIRCLE_RADIUS (т.е. не может быть установлен как часть миссии)
Параметры:
Turn – количество полных оборотов вокруг точки.
Dir 1=CW – направление вращения вокруг точки. Против часовой стрелки = – 1. Если положительное число – вращение по часовой стрелке.
Lat, Lon – ширина и долгота цели.
Alt – целевая высота над “домом” в метрах. Если оставить нулевое значение – квадрокоптер будет кружить на текущей высоте.
Overview¶
Copter has 25 flight built-in flight modes, 10 of which are regularly
used. There are modes to support different levels/types of flight
stabilization, a sophisticated autopilot, a follow-me system etc.
Flight modes are controlled through the radio (via a transmitter switch),
via mission commands, or using commands from a ground station (GCS) or
companion computer.
The table below shows for each flight mode whether it provides altitude or position control, and whether it requires valid position information from a sensor (typically a GPS) in order to arm or switch into this mode.
| Mode | Alt Ctrl | Pos Ctrl | Pos Sensor | Summary |
|---|---|---|---|---|
| Acro | – | – | Holds attitude, no self-level | |
| Airmode | – | -/ | Actually not a mode, but a feature,see below | |
| Alt Hold | s | Holds altitude and self-levels the roll & pitch | ||
| Auto | A | A | Y | Executes pre-defined mission |
| AutoTune | s | A | Y | Automated pitch and bank procedure to improve control loops |
| Brake | A | A | Y | Brings copter to an immediate stop |
| Circle | s | A | Y | Automatically circles a point in front of the vehicle |
| Drift | – | Y | Like stabilize, but coordinates yaw with roll like a plane | |
| Flip | A | A | Rises and completes an automated flip | |
| FlowHold | s | A | Position control using Optical Flow | |
| Follow | s | A | Y | Follows another vehicle |
| Guided | A | A | Y | Navigates to single points commanded by GCS |
| Heli_Autorotate | A | A | Y | Used for emergencies in traditional helicopters. Helicopter only. Currently SITL only. |
| Land | A | s | (Y) | Reduces altitude to ground level, attempts to go straight down |
| Loiter | s | s | Y | Holds altitude and position, uses GPS for movements |
| PosHold | s | Y | Like loiter, but manual roll and pitch when sticks not centered | |
| RTL | A | A | Y | Returns above takeoff location, may also include landing |
| Simple/Super Simple | Y | An add-on to flight modes to use pilot’s view instead of yaw orientation | ||
| SmartRTL | A | A | Y | RTL, but traces path to get home |
| Sport | s | s | Alt-hold, but holds pitch & roll when sticks centered | |
| Stabilize | – | Self-levels the roll and pitch axis | ||
| SysID | – | Special diagnostic/modeling mode | ||
| Throw | A | A | Y | Holds position after a throwing takeoff |
| Turtle | – | – | Allows reversing and spinning up adjacent pairs of motors in order to flip a crashed, inverted vehicle back upright | |
| ZigZag | A | A | Y | Useful for crop spraying |
| Symbol | Definition |
|---|---|
| – | Manual control |
| Manual control with limits & self-level | |
| s | Pilot controls climb rate |
| A | Automatic control |
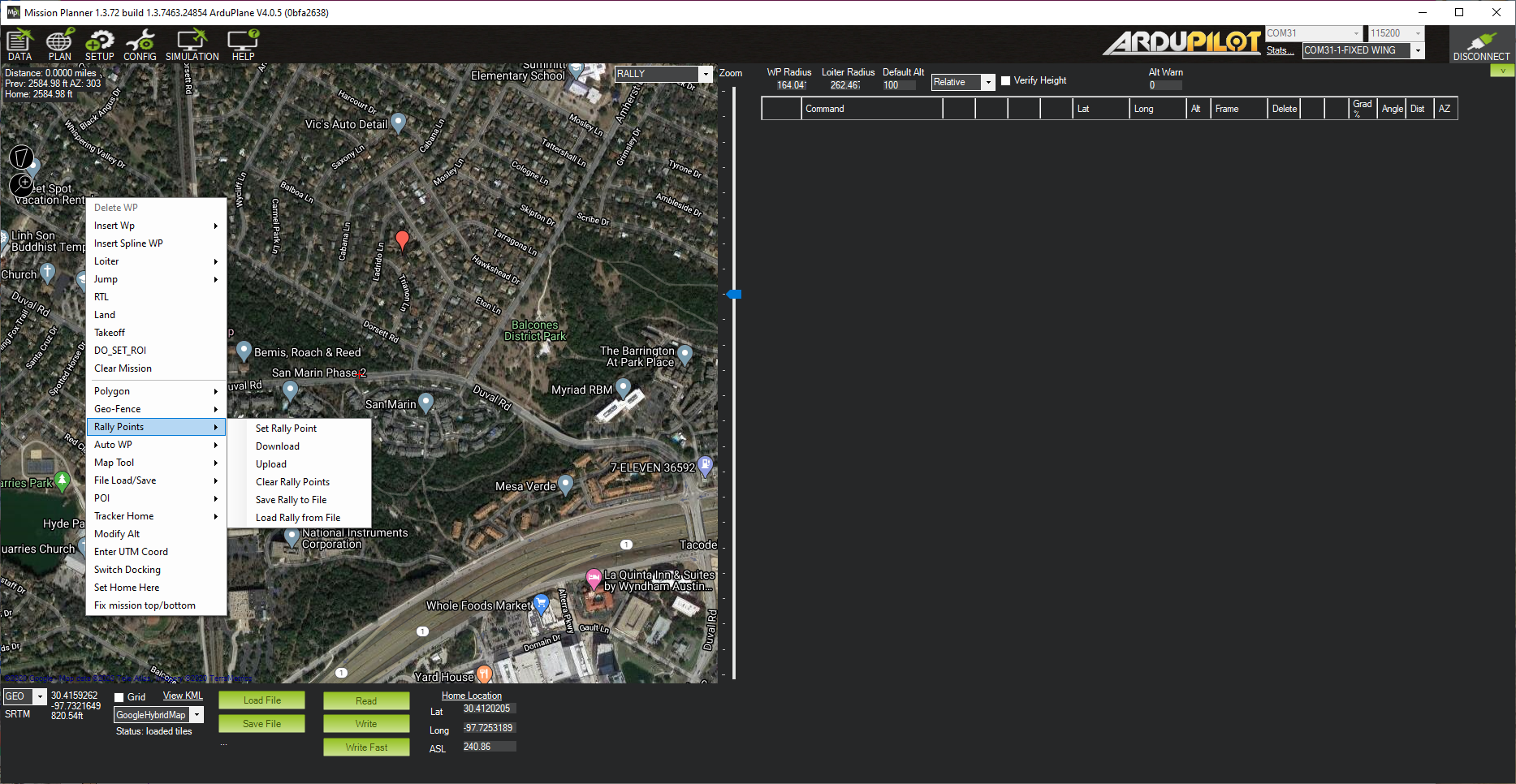
Rally points creation¶
The third option in the MISSION/FENCES/RALLY drop-down box, RALLY, allows creation of a RALLY points list. For use of RALLY points, see Rally Points.
Left clicking will create a Rally Point at the cursor, and it will appear in the mission list to the right. Just like waypoints, these can be written to and read from, the autopilot, as well as being saved or loaded to/from a file using the “Read”, “Write”, “Load File”, and “Save File” buttons.
In Plane only, saving and loading, is done from the right-click menu:
Return-to-launch

Эта миссия эквивалентра полетному режиму RTL. Как описано на этой странице квадрокоптер будет подыматься на
указанную высоту заданым параметром RTL_ALT (по умолчанию 15 метров) , прежде чем вернуться домой. Домашняя точка устанавливается там, где
он был снят с охраны (Arming). Эта команда не имеет параметров и как правило должна быть последней командой в миссии.
Spektrum dx8 (alternate method)¶
This section describes an alternative way to set 6 modes with the
Spektrum DX8. This method uses the Gear switch and the Flight mode
switch. All the other switches can be assigned as preferred. This method
also allows each mode to be set in the middle of each mode’s pulse width
range so small changes will not change modes. Use Mission Planner Flight
Modes setup to monitor the Current PWM for these adjustments.
Setup the switches (required for the 6 modes)
- Hold roller bar down, turn on DX8, scroll down to Switch Select,
Click roller bar. Set switches as follows:- Gear = Gear (Channel 5)
- FMode = Inh Not assigned to a channel – Used to mix with Gear Sw (Channel 5) for 6 modes
- Others anyway you want. One method is as follows:
- Knob to aux1 = channel 6 for camera tilt / tuning
- Mix = aux2 = channel 7 to save Way Point or RTL, auto trim or
other settings in APM configuration. - Flap to aux3 = channel 8 for other uses
- Click BACK until the normal screen appears, or turn off power,
then turn power back on.
- Hold roller bar down, turn on DX8, scroll down to Switch Select,
Set up the non-mixed servo setting for channel 5 (Gear channel
controlled by the Gear Switch)This will be the values with no mixing – F Mode switch in the 0
position and sets the lowest pulse width to 1165 us (mode 1) and
highest to 1815 us (mode 6)
Transmitter configuration¶
The transmitter must emit PWM signals in the correct range to allow us
to map a mode to a switch position.
If you want to just support three modes (using a three position switch)
then you would configure the transmitter to produce PWM pulse widths of
1165, 1425, and 1815 us for the respective switch positions.
If you want to support 6 modes then the transmitter will need to emit
PWM widths of around 1165, 1295, 1425, 1555, 1685, and 1815
us. Typically this is achieved by configuring the transmitter
to mix a two position switch and a three position switch (giving 6 modes
in total).
The sections below provide links showing how to configure transmitters
from different manufactures, and how to test (in Mission Planner) that
each switch setting is emitting the appropriate PWM signal.
Spektrum DX8 (alternate method)¶
This section describes an alternative way to set 6 modes with the
Spektrum DX8. This method uses the Gear switch and the Flight mode
switch. All the other switches can be assigned as preferred. This method
also allows each mode to be set in the middle of each mode’s pulse width
range so small changes will not change modes. Use Mission Planner Flight
Modes setup to monitor the Current PWM for these adjustments.
Setup the switches (required for the 6 modes)
- Hold roller bar down, turn on DX8, scroll down to Switch Select,
Click roller bar. Set switches as follows:- Gear = Gear (Channel 5)
- FMode = Inh Not assigned to a channel – Used to mix with Gear Sw (Channel 5) for 6 modes
- Others anyway you want. One method is as follows:
- Knob to aux1 = channel 6 for camera tilt / tuning
- Mix = aux2 = channel 7 to save Way Point or RTL, auto trim or
other settings in APM configuration. - Flap to aux3 = channel 8 for other uses
- Click BACK until the normal screen appears, or turn off power,
then turn power back on.
- Hold roller bar down, turn on DX8, scroll down to Switch Select,
Set up the non-mixed servo setting for channel 5 (Gear channel
controlled by the Gear Switch)This will be the values with no mixing – F Mode switch in the 0
position and sets the lowest pulse width to 1165 us (mode 1) and
highest to 1815 us (mode 6)
Click the roller bar, scroll down to Servo Setup, Select the Gear
channel, Select Sub Trim.Set sub trim to 0
Select Travel.
Set travel (left, position 0) for 1165 us pulse (~90%).
Set travel (right, position 1 for 1815 us pulse (~74%).
Set up Mix 1 to change the Gear Pulse width when F Mode is in
position 1Click roller, scroll down to Mixing, click roller, scroll to first
line under Mix (has xxx > xxx, AIL > RUD, or some other mix
set),click roller, Select Mix 1, Click roller.Set Mix: Gear > Gear. Gear changes Gear depending on Switch F Mode
settingSet Offset = 0, Trim = Inh.
Set SW = FM 1
Set the F Mode switch on the transmitter to position 1.
Set the Gear switch on the transmitter to position 0.
Set top Rate for pulse width of 1290 us for mode 2 (~-35%)
(change = 400 us * -90% * -35% = 126 us. Result = 1165 us 126
us = 1251 us = mode 2)Set the Gear switch on the transmitter to position 1.
Set bottom Rate for pulse width of 1685 us for mode 5 (~– 45%)
(change = 400 us * 73% *- 45% = -131 us. Result = 1815 us – 131
us = 1684 us = mode 5)
Set up a mix 2 to change the Gear Pulse width when F Mode is in
position 2
Как настроить дополнительный тумблер на mission planer. полетные режимы
Как нам уже известно, контроллер APM очень богат разнообразными полетными режимами, которые каждый пилот может использовать для своих целей. Рассмотрим эти режимы более детально и произведем их выбор в Mission Planner.
О полетных режимах начал писать в статье « », здесь продолжаю.
Без использования модуля GPS мы можем воспользоваться лишь несколькими (рассмотрю основные) полетными режимами:
- Stabilize
— основной режим, в котором рекомендуется взлетать и производить посадку. Задействованы гироскоп и акселерометр, компас дополнительно для контроля и коррекции. Управление газом производится вручную — для висения обычно действует правило — уровень газа 50% (это достигается при оптимальном подборе комплектующих, либо коррекцией уровня под тяжелые коптеры). Единственная помощь в этом режиме — удержание горизонта. При максимальном отклонении стиков крена и тангажа коптер не будет отклоняться больше 45° относительно горизонта. - Acro
— режим, при котором можно достичь более резкого и быстрого полета. Соблюдаются все те же условия, что при режиме Stabilize, только коптер может отклониться уже до 60°. - AltHold
— режим удержания высоты. В данном режиме добавляется использование бародатчика, который способствует удержанию высоты. Для наиболее правильной работы необходимо, чтобы уровень газа висения коптера был 50%. При положении стика газа в 50% и включенном режиме коптер должен сам удерживать высоту, на которой вы включили этот режим. При повышении или понижении газа происходит изменение высоты со скоростью, прямо пропорциональной величине отклонения стика вверх или вниз. - Land
— режим автоматической посадки в текущем положении. Используется бародатчик для контроля высоты. - Simple
— режим, который позволяет «забыть» об ориентации коптера относительно пилота. В данном режиме самым важным является компас. При арминге контроллер запоминает направление по компасу. При взлете и повороте коптера вокруг оси (рыскание), контролер сам учитывает, на сколько повернут коптер, и сам вносит поправку в радиоуправление так, что если, например, развернуть коптер передом к себе, то при отклонении стика тангажа от себя, коптер полетит на удаление, а не на приближение. Этот режим тоже хорош для начинающего пилота. При использовании этого режима важно не менять свое положение (не поворачиваться) и помнить, в каком направлении стоял коптер перед взлетом.
При наличии модуля GPS
можно воспользоваться дополнительными режимами:
- Loiter
– режим удержания точки (по координате и высоте). Режим хорошо подходит для обучения полетам, фото и видеосъемки. - RTL (Return To Launch)
– возврат домой, в точку взлета. Контроллер запоминает точку, где произвели Arming и позволяет вернуть коптер в эту точку. - Auto
– полет по точкам миссии. Миссия может создаваться вручную через ПО Mission Planner, а также можно добавлять точки, используя дополнительный тумблер на аппаратуре радиоуправления. - Position
– удержание позиции (только по координате). Режим хорошо подходит для фото и видеосъемки. - Circle
– полет по окружности носом к центру. Позволяет автоматически облетать какой-либо объект вокруг. - FailSafe – RTL
– режим спасения, который отправит коптер лететь домой. Режим можно настроить на включение при срабатывании одного/нескольких условий, таких как: потеря сигнала РУ, потеря сигнала телеметрии, низкий уровень заряда аккумулятора. При потере сигнала GPS можно выполнить режим Land. - Guided
— полет по команде, данной с наземной станции (компьютер с Mission Planner). Задается точка на карте и нажимается кнопка «Лететь сюда». - FollowMe
— полет «хвостиком» за ведущим. Ведущим может быть ноутбук, на котором установлен модуль GPS. Коптер будет следовать за ведущим в том же направлении и с той же скоростью. Режим будет интересен тем, кто хочет снять себя на видео, например на велосипеде. - Super Simple
— режим, который до 10м радиусе не вносит поправок в управление, а на удалении больше 10 метров работает на «притягивание к дому», т.е. если стик тангажа тянуть на себя, то коптер полетит к точке дома. Больше 10 метров также не важно, как коптер ориентирован, т.е. как в Simple. Удобно, если «зарулились».
В крайних версиях прошивки (начиная с 3.1.х) еще добавлены режимы, такие как: Sport, Drift, Hybrid. О них позже…
Пока нам этого достаточно. На первых порах нас больше всего интересуют 2 режима: Stabilize и Loiter. Stabilize — основной режим, в котором лучше всего взлетать и садиться. Если в этом режиме коптер висит и летает достаточно хорошо (никуда его не сносит, не падает, хорошо слушается стиков), то с большой уверенностью можно сказать, что все было сделано правильно или почти правильно. Loiter — режим, с помощью которого (повторюсь) лучше всего начинать учиться летать, т.к. он достаточно спокойный и подходит начинающему пилоту. Если в этом режиме коптер хорошо держит позицию (не сносит по сторонам, не крутит кругами, нет просадки по высоте), то считаем, что тоже все сделано правильно.
Прежде чем попробовать эти режимы — нам сначала их необходимо настроить. Настройка осуществляется в Mission Planner. Запускаем программу, подключаемся к контроллеру APM. Далее переходим к вкладке «CONFIG/TUNUNG» — «Flight Modes» и видим окно настроек:
На данном изображении показано, как я обычно делаю настройку режимов.
Думаю, что с переключателем режимов вы уже определились, тогда можно приступить к настройке. У меня используется , поэтому я не буду говорить «переключаем тумблер»
, а буду говорить «нажимаю кнопку»
. Еще раз проверяем, как работает переключатель, т.к. щелкаем все 6 кнопок по очереди и видим подсвеченную строку режима. Первый режим у меня — Stabilize. При включении пульта переключатель устанавливает низкий уровень импульса. Второй режим тоже Stabilize, но к нему добавлена настройка «Simple mode». Третий режим у меня для частого изменения, т.е. меняю по мере надобности. Четвертый — Alt Hold, пятый — Loiter, шестой — RTL. В итоге получается удобная для меня последовательность режимов: в начале — взлетел, по необходимости включил Simple, в центре режимы по необходимости, в конце — для висения в воздухе и возврата автоматом к дому, нажимаю соответствующую кнопку.
К данной настройке особых рекомендаций нет и делать можете, как вам удобно! После изменения настроек необходимо нажать кнопку «Save Modes» для сохранения. Перед каждым полетом советую заглядывать в Mission Planner, чтобы вспомнить ваши настройки полетных режимов.
Update 28.05.2023:
Перенес режим Super Simple в режимы, зависящие от GPS.
Если вы нашли ошибку на странице, то нажмите Shift Enter
или , чтобы уведомить нас.
Прежде чем сделать свой первый полет даже в ручном режиме мне потребовалось достаточно долго повозиться с настройкой Ardupilot APM 2.8. Надо сразу отметить, что данная версия имеет отличия от предыдущей 2.6 по расположению разъемов и их назначению. Особенно это касается подключения внешнего компаса.
После загрузки прошивки уже можно устанавливать соединение с Ardupilot и делать дальнейшие настройки через USB.
Первое что я делал в настройке Ardupilot APM 2.8 – это калибровка акселерометра и калибровка радиопередатчика. Эти настройки одни из самых простых, никаких проблем и нюансов там не возникает. Поэтому подробно описывать процесс смысла нет. Все инструкции даны на сайте разработчиков:
Чуть менее понятная, хотя на деле все так же нетрудная, калибровка регуляторов хода ESC. Чтобы подружить плату APM 2.8 с регуляторами хода и добиться точного управления моторами потребуется несложная последовательность действий:
Во-первых, снять пропеллеры с моторов из соображений безопасности.
Моторы должны быть установлены на раме, подключены к регуляторам, те в свою очередь подключены к плате Ardupilot.
Плату APM не нужно подключать к компьютеры ни по USB, ни по радиоканалу.
1. Включаем передатчик радиоуправления (на момент калибровки регуляторов радиоуправление должно быть уже откалибровано). Высталяем ручку газа на максимум.
2. Берем Li-Po аккумулятор и подключаем к разъему Power-модуля для включения автопилота. Питание регуляторов соответственно тоже будет обеспечивать этот аккумулятор.
3. После включения APM будет мигать своими синими и красными светодиодами как полицейская машина. Этим он сигнализирует готовность к калибровке при следующем включении. Отключаем аккумулятор от Power-модуля.
4. Включаем питание заново. Регуляторы издают стандартный звуковой сигнал (обычно количество сигналов равно количеству банок в батарее) и через некоторое время дважды издает короткий сигнал, что подтверждает калибровку по максимальному газу.
5. Опускаем ручку газа в минимальное положение. Регуляторы издают один долгий сигнал, что подтверждает калибровку по минимальному газу.
6. С этого момента калибровка регуляторов для APM 2.8 завершена и можно проверить работоспособность моторов.
7. Убираем газ на минимум и выключаем питание Ardupilot.
Данная процедура проводит калибровку регуляторов по схеме “все за раз”, что достаточно для большинства моделей ESC.
Что касается калибровки компаса, то тут все посложнее. На плате APM 2.8 есть встроенный внутренний магнитометр, который, в принципе, может быть использован как основной компас. Но т.к. у меня имеется внешний магнитометр в одном корпусе с GPS приемником, мне лучше использовать его. Важный момент в подключении внешнего компаса: на плате APM 2.8 для него предусмотрен отдельный разъем прямо под разъемом для GPS антенны. Поэтому подключаем его туда, а не в разъем 12C, как на более старых версиях.

Сначала я попытался провести калибровку компаса APM 2.8 по стандартной схеме, не задумываясь о совместимости внешнего и внутреннего компаса. Этого сделать не удалось. Сам процесс калибровки хоть и не выдавал ошибки и значения в трехмерной системе координат появлялись на экране, все же набор этих значений был абсолютно некорректным, я бы даже сказал неадекватным. Для нормальной калибровки потребовалось отключить внутренний компас APM 2.8 . Это делается просто: нужно вынуть перемычку справа от разъема GPS. Просто избавиться от нее.
С этого момента внутренний компас перестает работать и в калибровке участвует только внешний.
Без внутреннего компаса на экране показывает ошибку Compass 1 error: 99 , но это никак не мешает процессу калибровки внешнего.
Для первой калибровки отключите галочку Use Auto Accept внизу окна, чтобы собрать побольше значений. Набрав 2000 -2500 значений по всей сфере, можно заканчивать калибровку.
На этом основные настройки связанные с оборудованием закончены. Вся дальнейшая работа предстоит в основном по настройке параметров для корректного поведения в полете.
Примечание:
элевоны (сочетание элерон/руль высоты, используемые в “летающем крыле”) также поддерживаются “просто подключите их к первым двум каналам, точно так как это было подключено в RC приемник. Перед калибровкой радио укажите включить элевон-перемешивание в настройках “Mission Planner”, перезагрузите программу и плату и вернитесь к процедуре калибровки RC.
Если ваш аппарат имеет V-хвост, это в настоящее время не поддерживает APM на уровне программного обеспечения. Вместо этого, вы можете смешать ваши каналы крена и руля высоты при помощи внешнего аппаратного микшера. Вот хороший и очень недорогой ($ 3) за шт.
Выходы

Подключите управление сервоприводами и другими устройствами, к APM в соответствующие выходные разъемы, как показано выше.
Четырехканальная конфигурация:
- 1. aileron – элероны
- 2. elevator – руль высоты
- 3. throttle – канал газа
- 4. rudder – руль направления
элевонная конфигурация: в англоязычной вики значится по состоянию на 10.04.2023
- 1. starboard (right) elevon – правый элевон
- 2. port (left) elevon – левый элевон
- 3. throttle – канал газа
правильно так:
- 1. port (left) elevon – левый элевон (№1 на картинке)
- 2. starboard (right) elevon – правый элевон (№2 на картинке)
- 3. throttle – канал газа
Установка контроллера в фюзеляж
Когда вы размещаете APM в самолете, очень важно убедиться, что его лицо смотрит в правильном направлении. Какие приметы: Разъемы GPS и приемника должны быть обращен вперед, а серво-кабели обращены назад.
(примечание: есть небольшая стрелка на нижней части платы, которая указывает вперед, на всякий случай)

Советы по монтажу
- При установке APM в самолете, важно, чтобы убедиться, что он надежно установлен и не сдвинется в полете. Он также должен быть как можно ближе к горизонтали, при положении самолета в своем летном положении. В идеале, его разместить как можно ближе к центру тяжести, на демпфирующую вибрации платформу.
- на автопилоте установлен барометрический датчик, это означает что вентиляционные отверстия должны обеспечивать атмосферное давление внутри кабины при любом возможном обдуве
- на автопилоте установлен компас, это значит что силовые провода должны быть как можно дальше от контроллера (как минимум 10-15см) постоянный ток большой величины создает магнитное поле, влияющее на компас.
GPS модуль
- Антенна GPS модуля должна быть ориентирована строго вверх
- Место для установки следует выбрать GPS максимально далеко от радиопередающего оборудования (например, телеметрии и видео передатчиков и ESC).
- В идеале, модуль GPS не должен быть прикрыт нечем от неба. Самая верхняя точка самолета является хорошим выбором.
Вот пример того, как монтировать APM (и модуль GPS) в EasyStar с использованием шасси 3D Robotics Electronics, доступными с наклонно-поворотным узлом для монтажа камеры или без. Аналогичное шасси также доступно для HobbyKing Bixler
.
Шасси:



Первичная настройка APM
Мы рекомендуем использовать программу Mission Planner для первичной настройки APM. (Программа разработана для Windows, но будет работать в Windows VM на Mac OS или в Mono под Linux. Либо, если вы не хотите использовать ничего из перечисленного, задействуйте режим командной строки, который поддерживается в любой операционной системе.)
После того как вы скачали нужную прошивку, убедитесь что указаны правильные номер COM порта и скорость передачи (115k) и нажмите кнопку Connect в правом верхнем углу. Программа Mission Planner подключится через MAVLink.
(Если это первое использование вашего АРМ, сразу запустится форматирование флэш памяти, которое может помешать соединению через MAVLink и появлению сообщения о сбое подключения. В этом случае подождите пару минут и попробуйте подключиться снова.)
Теперь нажмите кнопку установки, выделенную красным на рисунке:

Откроется окно настройки конфигурации.
Шаги установки
1) Если у вас стандартная конструкция летательного аппарата, загрузите готовую конфигурацию
Для распространённых моделей самолётов, таких как Bixler, Skyfun and Skywalker, подготовлены конфигурационные файлы, которые учитывают особенности этих самолётов. Вы можете скачать их отсюда
и использовать программу Mission Planner чтобы записать готовую конфигурацию в APM. Однако, вам всё ещё нужно проверить настройки с учетом оборудования, которое вы используете. Продолжайте выполнять следующие шаги.
2) Откалибруйте входные сигналы вашего радио

Передатчик должен быть включен. Идеально, если вы уже облетали ваш самолет в ручном режиме и сделали необходимые регулировки, в этом случае выходные сигналы радио четко соответствуют настройкам самолёта; если вы ещё не летали на самолёте в ручном режиме и регулировки не выполнены, вам может понадобится повторная калибровка после того, как вы полетаете (перекалибровку легко сделать в поле).
Распределение каналов показано выше. Когда вы двигаете ручки передатчика, соответствующая полоска на экране также будет двигаться. Нажмите кнопку “Calibrate Radio” чтобы установить крайние положения уровней. Появятся красные полоски, и вы должны будете сдвинуть их в крайние положения. Проделать это необходимо для каждого используемого канала.
На этом же экране можно включить реверс сервомашинок, если необходимо, и установить режим элевонов.

3) Установка полетных режимов
Вы можете выбирать разные полетные режимы находясь в полете, с помощью переключателя на радио передатчике, который должен быть подключен ко входу 8 APM. Полная информация о доступных полетных режимах здесь
. (Если вам нужно иметь более трех режимов на вашем передатчике, инструкция здесь
) Когда вы меняете положение переключателя, зеленая подсветка переходит на другие уровни. Используйте выпадающий список на каждом уровне, чтобы назначить этот режим на функцию. Заметьте, что режим 6 не может быть изменен и должен остаться Manual. Это “аппаратный ручной режим”, который означает, что он контролируется контуром failsafe платы APM, таким образом реализуется возможность вернутся к радио управлению в качестве меры безопасности.

4) Конфигурация оборудования
В этой вкладке вы можете указать плате APM какие опциональные сенсоры вы подключили. Просто включите флажок соответствующий сенсору, который вы используете. (В данный момент сонар не поддерживается APM; главным образом он используется для ArduCopter)

Для магнетометра (компаса), у вас есть выбор опции калибровки, когда вы его активируете:
1. Вы можете ничего не делать, и в этом случае управляющая программа попытается выяснить смещение и магнитное склонение, сравнивая показания компаса с данными GPS и IMU во время полета. Плюс: Не требует усилий. Минус: Потребуется несколько минут полета, чтобы компас начал работать правильно, поэтому в первый запуск компас работает ошибочно.
2. Ручная калибровка в программе Mission Planner (выше). Вы можете указать ваше магнитное склонение по инструкции ниже и затем нажать кнопку “Live Calibration”, затем перемещать и поворачивать ваш самолет 30 секунд пока запишутся данные и выполнятся некоторые математические операции для калибровки сенсора. Плюсы: Это работает. Минусы: это немного затруднительно, особенно для больших самолетов. Кроме того такая калибровка не учитывает магнитных помех, которые может вызывать мотор во время полета.
3. Воспроизвести лог полета. Это классная опция, показанная выше как Log Calibration, где вы можете просто воспроизвести предварительно сохраненный лог полета (.tlog) и управляющая программа сравнит данные GPS и IMU с данными компаса и сделает необходимые корректировки. Плюсы: Работает великолепно. Минусы: Вы должны уже были летать, и если вы загрузите файл.tlog где вы в действительности не летали, вы спутаете ваши калибровки и должны будете провести их снова, или рискуете получить плохие полетные характеристики.
Чтобы вручную ввести магнитное склонение для вашего географического местоположения, вы должны найти правильное значение, нажав на ссылку и открыв браузер. Выберите ваше положение и вы получите магнитное склонение, как выделено ниже.
Не каждый собранный комплект GPS APM способен сразу и полноценно выполнять авто пилотирование, имею ввиду режимы RTL, полет по точкам или лойтер. Можно встретить много жалоб и вопросов в интернете “включил режим loiter, а коптер улетел в неизвестном направлении”. У меня была другая ситуация: самолет – включил возврат домой, а он резко направился в землю (без FPV). Выгрузил лог из APM и выяснилось, что показания высоты GPS сильно менялись каждые 2-3 минуты, с начало 450 м затем 660 м и количество видимых спутников скакало с 6 до 10, т.е. в режиме возврата домой полетный контроллер опирается на данные со спутников, вот и решил, что высота запуска (дом) 450 м, а был самолет на высоте 660 м (это город у нас на возвышенности, полет проходил на высоте 20 м от земли) и решил вернуть его на нужную высоту. Пробовал просто ходить по стадиону c GPS APM затем смотрел лог, записаные данные – ужас, то якобы на 2 метра под землей, а затем за 2 минуты как по лестнице поднялся на 80 метров! То, что GPS модуль не работает нормально это понятно, но хотелось бы, без опасения, пользоваться другими функциями APM которые не связаны с ним.
Поэтому тестируя новый (еще не опробованный) APM с GPS будет удачно использовать следующие режимы в определенной последовательности:
- MANUAL – без него никуда,
- STABILIZE – необязателен если радиоуправление не поддерживает большое количество режимов,
- CIRCLE – режим полета “по кругу” по данным встроенного гироскопа, барометра, акселерометра (доступен режим без GPS),
- LOITER или RTL – режимы навигации по ранее заданным точкам или в точку запуска,
Чтоб избежать резких смен высоты в режиме RTL необходимо в конфигурацию внести параметр ALT_HOLD_RT=-1
означающий – сохранять текущую высоту в режиме полета домой.
Возможно не все знают что, начиная с APM 2.5 можно устанавливать “вверх ногами”, точнее устанавливать можно любой стороной, это очень удобно в условиях ограниченного пространства. Параметр отвечающий за положение (ориентированность) APM в пространстве AHRS_ORIENTATION.
Чтобы установить APM 2.6 вверх ногами:
В Mission Planner – Config/Tuning – Full Parameter List – Искать (find), ищем AHRS_ORIENTATION и устанавливаем значение AHRS_ORIENTATION=8
Одна из популярнах на сегодняшний день моделей самолета для FPV это Bixler (Skywalker). Легко собирается, легок в управлении, легко поддается самому сложному ремонту. Обладая “скошенным”, полукруглым дном фюзеляжа установка APM весьма неудобна. Большая часть свободного места фюзеляжа как правило уходит под аккумуляторы (основной и для видео передатчика). Особенно удобно устанавливать APM на Бикслер вверх ногами, под крышку “кабины”.
Калибровка регуляторов оборотов моторов
После калибровки радиоканалов нужно провести калибровку ESC. Нужно это для того, чтобы ESC знали, в каких пределах будут изменяться уровни PWM на радиоканале и на выходе с платы автопилота. Можно калибровать регуляторы по отдельности, подключая их по очереди к третьему каналу радиоприёмника, а можно откалибровать все разом, тем более, что в случае ArduCopter и Turnigy Multistar здесь проблем никаких нет.
Итак,
- Снимаем пропеллеры, если они надеты.
- Отключаем USB, если он подключен.
- Включаем пульт и ставим газ (throttle) на максимум.
- Подключаем батарею к плате распределения питания на коптере.
- ArduCopter загружаеся и начинает попеременно мигать красным, синим и жёлтым диодом, сообщая, что он почти готов к калибровке.
- Отключаем батарею и снова подключаем.
- ArduCopter снова загружается, снова мигает диодами, и спустя несколько секунд все регуляторы издают серию писков. Они должны пискнуть количество банок в батарее и ещё два раза, сообщая, что верхнее значение PWM зафиксировано.
- Опускам газ в минимум, ждём ещё несколько секунд и слышим ещё один писк, сообщающий, что нижнее значение PWM зафиксировано.
- Отключаем батарею.
 Для тонкой настройки ESC потребуется программатор. Программаторы делаются разные под разные брэнды самих регуляторов. В частности, программатор для Turnigy Multistar выглядит таким вот образом.
Для тонкой настройки ESC потребуется программатор. Программаторы делаются разные под разные брэнды самих регуляторов. В частности, программатор для Turnigy Multistar выглядит таким вот образом.
Пользоваться им легко. Нужно выставить с помощью шести джамперов нужные настройки, подключить сигнальным проводом ESC к выходу программатора, который обозначен словом Controller (тут есть распиновка и даже для тугих подсказан цвет – коричневый -, который надо воткнуть в данный пин).
Вот какие настройки можно менять:
- Batt Type. Предлагает на выбор NiXX, LiXX и KiFe. Оставляем LiXX, для своих LiPo-батарей. В том случае, если мы захотим полностью выключить отсечку, сможем установить NiXX. В этом режиме нижний уровень напряжения осечки составит 0.6 В на банку. Этот вариант хорош, вероятно, для полётов над водой, но надо помнить, что при сильном понижении напряжения есть вероятность того, что запитанная от BEC плата сама перезагрузится или выключится, и коптер всё равно пойдёт камнем вниз.
- Cut off Voltage. Напряжение отсечки, даёт выбрать значения High, Medium и Low, что соответствует для LiPo-батареи соответственно 3.2, 3.0, 2.8 В на банку. Это уровень, ниже которого напряжение считается нерабочим. Для батареи вредно опускание напряжения ниже 3 В на банку, но лучше в критичной ситуации испортить батарею, чем потерять весь квадрокоптер целиком. Так что ставим Low.
- Cut off type. Тип отсечки. Это то, что будет делать ESC в случае отсечки. Hard – это полное обесточивание моторов (только хардкор, только падение камнем вниз!). Slow down – это постепенное снижение напряжения с ненулевой вероятностью плавно приземлиться. Этот вариант и оставляем.
- Rotation. Позволяет переключить направление вращения. Проще перекинуть провода.
- Brake. Останавливает моторы при минимальном значении PWM газа. В режиме Hard делает это быстро, жёстко и без раздумий. В режиме Medium останавливает моторы постепенно. В режиме Off функция отключена. Для мультикоптера функция бесполезна, нужна она для самолётов в режиме планирования и при посадке. Так что нужно ставить Off.
- Timing. С этим параметром разобраться сложнее. Тут стоит окунуться в физику процессов. В старых добрых электродвигателях постоянного тока был коллекторный узел, который с большой частотой переключал ток в обмотках ротора, обеспечивая вращение последнего. У нас же моторы бесколлекторные, и переключением напржения на обмотках занимается ESC. То есть ему нужно постоянно синхронизироваться с мотором для определения его положения (именно поэтому между мотором и ESC три провода). Увеличение тайминга позволяет ускорить синхронизацию. Но здесь нужно экспериментировать. Тем более, что это увеличение приводит и к увеличению скорости вращения мотора и увеличенному расходу энергии. Я – за опцию Auto.
- Start Up. Скорость подачи напряжения на мотор при старте. High – подача напряжения сразу, Medium – постепенное нарастание напряжения (за 1 секунду), Low – ещё более постепенное (за две секунды). Для мультикоптера смело можно ставить High.
Настройка кривой газа
Ручка газа на трансмиттере управляет довольно широким диапазоном PWM, определяющим скорость вращения пропеллеров. Причём рабочий полётный диапазон довольно узок: ниже него квад стоит на земле либо движется вниз, выше него он с большой скоростью набирает высоту.
Для начала нужно примерно определиться с самим диапазоном. Лучший способ – попробовать полетать, а затем проанализировать логи (как описано в этой статье) и выяснить в каких пределах менялся ThrIn. У меня график выглядел довольно странно (розовая линия – ThrIn, жёлтая – BarAlt, то есть высота по барометру):
Теперь можно открыть калибровку радиоканалов в MissionPlannere и настройку Throneedle в меню Turnigy 9X (речь про стоковую прошивку этой аппаратуры). Здесь нужно включить кривую (STA: ACT) и настроить саму кривую на свой вкус по пяти точкам примерно так, чтобы основной диапазон был как можно более пологим. Конкретные значения PWM можно параллельно смотреть в окне калибровке для 8-го канала, двигая стик газа туда-обратно.
Добившись каких-то результатов и не забывая о том, что эти настройки можно легко менять впоследствии, даже прямо в поле, нам остаётся только переключить 8-й канал радиоприёмника на 3-й канал APM (канал газа). При этом в запасе после настройки полётных режимов у нас остался только один свободный канал – седьмой.
Подготовка передатчика turnigy 9x
Во-первых, режим работы надо переключить в “Самолёт” (Acro). Несмотря на то, что коптер больше похож на вертолёт, ArduPilot рассчитан именно на самолётный режим. Это можно сделать в Menu -> System settings -> Type Select.
Дальше надо настроить AUX-каналы (если этого не сделали раньше, при калибровке радиоканалов). Это можно сделать в Func Settings -> AUX CH. Если режимов полёта требуется не более двух, то пятый канал (который будет переключать режимы полёта) можно настроить на GEAR или THRO HOLD и на этом закончить. Для настройки всех шести режимов идём таким путём:
1. На пятый AUX-канал, всё-таки ставим GEAR (или THRO HOLD), а на шестой – NULL. Остальные каналы – на своё усмотрение, они пока не интересны.
2. Шестой канал на выходе радиоприёмника переставляем в пятый вход на полётной плате. Пятый канал, на котором висит GEAR, можно вообще отсоединить, он теперь бесполезен.
3. Открываем в Mission Planner’е уже знакомое нам окно настройки режимов полёта.
Здесь строчка Current PWM показывает текущую длительность импульсов на пятом канале платы, то есть на шестом канале радиприёмника. А колонка справа показывает диапазоны PWM, соответствующие разным режимам. Наша задача – настроить сигналы на комбинациях стиков таким образом, чтобы их PWM попадали примерно в середину соответствующих диапазонов. Делать это будем в п.4.
4. На передатчике идём в меню Func Settings -> Prog. Mix. Открываем MIX1 и включаем его (STATE: ACT). Параметр SW ставим в NOR, то есть верхнее положение трёхпозиционного тумблера F.MODE (сам тумблер надо переключить в это же положение). MASTER ставим в GYR (то есть 5-й AUX-канал, на котором у нас стоит GEAR)
, а SLAVE ставим в FLP (то есть 6-й AUX-канал, на котором было пусто, но сейчас будет микс двух сигналов). Сам GEAR переключаем в дальнее положение и, изменяя параметр DNRATE, смотрим, как меняется PWM в окне Mission Planner’а (кому-то удобно смотреть и в консоли).
Подбираем такое значение, которое точно будет меньше, чем 1230, но лучше в районе 1165. Это будет первый режим. Затем GEAR переключаем в ближнее положение и подбираем значение UPRATE, которое даст PWM в районе 1295 (в середине между 1231 и 1360). Это будет второй канал.
Повторяем процедуру с MIX2. Тут нужно будет указать SW: ID1 (и переключить тумблер F.MODE в соответствующее положение). Меняя DNRATE и UPRATE, настроиться на 3-й и 4-й режимы. А потом повторить процедуру третий и последний раз.
5. Готово. Останется выбрать режимы по вкусу. Правда, я не знаю, почему микс нельзя настроить на пятом AUX-канале, чтобы не вводить излишнюю энтропию с подключением шестого радиоканала в пятый вход платы. Я пробовал настроить SLAVE на GYR, но ничего в таком варианте не работало.
Пробное включение
На квадрокоптере нужно подключить батарею, оставив APM подключённым через USB к компьютеру. Теперь можно активировать плату (Arm), нажав левый стик на аппе в правое нижнее положение (независимо от того, mode 1 или mode 2). Mission Planner покажет, что аппарат в режиме “Armed”:
Если этого не происходит, то можно попробовать Arm / Disarm с помощью одноименной кнопки в закладке Actions (Действия). Если и она не помогает, то в настройке Arming Check (меню Config/Tuning -> Standard Params) нужно на время тестирования выставить значение Skip GPS или Disabled.
После активации нужно увеличить газ и посмотреть, в какую сторону вращаются моторы. Направления вращения должны соответствовать схеме:
Для изменения направления вращения нужно поменять местами два любых провода между соответствующим мотором и его регулятором. Также по этой схеме нужно будет закреплять пропеллеры на моторах. На тех, которые вращаются по часовой стрелке, должны быть левостронние (LH или pusher) пропеллеры, а на остальных, соответственно – правосторонние (RH или normal).
Точка / waypoint

Квадрокоптер будет лететь по прямой линии в место указанное в качестве точки
( по координатам долготы, ширины и высоты в метрах).
Параметры:
Delay / Задержка – количество времени (в секундах) что бы
ждать в точке маршрута прежде, чем приступать к следующей команде.
Hit Rad – не поддерживается – предназначена для удержания расстояния (в метрах)
от нацеленной точки, которая будет претендовать как на “пройденную” точку. Эта команда не поддерживается.
Используйте параметр WPNAV_RADIUS (см. WP RADIUS) в скриншоте или настройче через “Parametr List”.
Даже WPNAV_RADIUS используется только когда путевая точка имеет задержку. Без задержки путевая точка будет
считаться завершенной, когда виртуальная точка будет достигаться квадрокоптером. Это может быть 10 или более
метров (от реальной координаты) по ходу движения, означающего, что квадрокоптер будет повернут в сторону следующей точки маршрута.
Yaw Ang – не поддерживается – означало угол поворота направления в градусах
(0 = север, 90 = восток). Вместо этого используйте CONDITION_YAW команду (cм. ниже).
Lat, Lon – широта и долгода цели. Если оставить как ноль – она будет остановиться на текущем
местоположении.
Alt – целевая высота над “домом” в метрах. Если оставить как ноль – будет поддерживать текущую высоту.