

- 20 советов пилоту dji mavic mini, чтобы уберечь свой дрон от крушений и утраты
- Введение
- Вид от первого лица (fpv)
- Видеокамера
- Подвес
- Бесколлекторный подвес
- Радиоуправляемый сервоподвес
- Видеопередатчик (vtx)
- Мощность видеопередатчика
- Частоты/каналы видеопередатчика
- 900мгц (0.9ггц)
- 2ГГц (от 1.2 до 1.3 ГГц)
- 4ГГц (от 2.3 до 2.4ГГц)
- 8ГГц
- Разъёмы видеопередатчика
- Антенна видеопередатчика
- Видеоприёмник (vrx)
- Антенна видеоприёмника
- Видеодисплей
- Жк монитор (lcd монитор)
- Fpv очки
- Отслеживание головы
- 3d/виртуальная реальность
- Smart устройства
- Экранное меню (osd)
- Соображения касательно расстояния удаления
- Питание
- Бпла/дрон
- Пилот
- Базовая станция
- Антенный трекер
- Fpv rc – пульт для дальних полетов и антенное хозяйство
- Xk-innovations x380
- Аналогия лампочки
- Как увеличить радиус действия таких квадрокоптеров
- Устройство и принцип действия
20 советов пилоту dji mavic mini, чтобы уберечь свой дрон от крушений и утраты

Адекватная цена на летающую камеру профессионального качества, компактный размер, простое управление и большой ресурс аккумуляторов уже сделали Миник «народным» дроном для фотографов, путешественников и энтузиастов.
Но этот квадрокоптер — не для рекордов высоты, дальности и скорости. Он очень лёгкий, боится ветра и темноты, теряет сигнал пульта даже при незначительных помехах. Поэтому запаситесь терпением, придержите свои амбиции пилота — покорителя высот, и желание делать крутые кадры уровня Mavic 2 Pro или Inspire.
В этой статье Вы найдёте два десятка рекомендаций, основных на моём личном опыте эксплуатации DJI Mavic Mini, которые уберегут начинающего пилота от глупых ошибок и не очевидных опасных ситуаций.
1. Подпишите свой дрон. Наклейте наклейку с Вашим WhatsApp и Email. Если Вы потеряете квадрокоптер и его найдёт кто-то другой, то есть шанс, что с Вами свяжутся и вернут потеряшку.
2. Следите за RC кабелем от смартфона к пульту. Он маленький, чёрный и поэтому его очень легко потерять, а запаски нет даже в FMC комплекте. Оригинальных кабелей на замену в магазинах DJI я не нашёл. Купил на Алиэкспресс аналог с более громоздкими штекерами. А пока ждал доставку, полтора месяца колхозил метровую «кишку» из переходников и подручных средств, чтобы хоть как-то летать.
3. Не забывайте включать авиа-режим на Вашем смартфоне при управлении квадрокоптером. Звонок друга или смс от любимой могут стоить Вам дрона.
4. Будьте внимательны при полётах над водой ниже уровня взлёта, например с высокого берега или с борта корабля. Дрон теряет позиционирование по высоте, из за бликов, отражений и волн не видит расстояние до поверхности и пытается приземлиться. Если при этом будет потеря сигнала с пультом, то до твёрдой поверхности Вы уже не дотянете и утопите свой коптер. Вообще, при любых полётах над водой — потеря дрона лишь вопрос времени.
5. Не запускайте дрон в сильный ветер. Мавик Мини очень лёгкий. Поэтому ему сложно бороться с порывами ветра. Если Вы летаете рядом с деревьями, зданиями или другими объектами, есть риск шарахнуть дрон об стену или запутаться в ветвях.
6. Планируйте направление полёта всегда против ветра, чтобы было легче возвращаться с попутным ветром. Одна из самых распространённых причин потери дронов — не хватает мощности и заряда аккумулятора, чтобы вернуться на базу против ветра.
7. Не летайте в плохо освещенных помещениях без защиты винтов. Железобетон и бытовая техника блокируют GPS, искажают радиосигнал и дают помехи на компас. Квадрокоптер ориентируется только по фото-датчикам поверхности, а в темноте ему это сложновато. Поэтому можно влететь в мебель, стену или Ваших домочадцев.
8. При полётах в городе избегайте локаций с сотовыми ретрансляторами (группы направленных прямоугольных антенн на крышах) так как они нарушают связь с пультом уже на дистанции 30 метров.
9. Заранее продумайте высоту и траекторию автоматического возврата дрона. На пути не должно быть зданий, деревьев, труб, вышек и мачт освещения. И особенно проводов.
10. Если Вы все же не смогли вернуть дрон на базу и он совершил аварийную посадку или потерпел крушение вне зоны прямой видимости, то не спешите прыгать в авто и ехать к точке на карте. При принудительной посадке на пустом аккумуляторе у Вас есть ещё около 10 минут, чтобы найти свой коптер. Если расстояние до точки меньше километра, (вряд ли Вы улетите на Минике дальше без потери сигнала), быстро идите напрямую пешком.
11. Не улетайте далеко в городе и не залетайте за здания. По моему опыту: залетел за здание — потерял связь и контроль.
12. Возвращайтесь в зону прямой видимости уже на 50% аккумулятора. При зарядке менее 20% летайте толко рядом с собой над твёрдой ровной поверхностью.
13. Не взлетайте из пыли, песка, снега или травы и не приземляйте дрон на такие поверхности. Контакт с любыми инородными частицами может привести к быстрому износу и разрушению механических и электронных частей — винтов, моторов, аккумулятора, электронной платы, подвеса стабилизатора и камеры.
14. Не взлетайте, не летайте и не приземляйте дрон рядом с животными или птицами. Небольшой размер и жужжание Мавика Мини вызывают агрессию и провоцируют нападение животного или птицы на Ваш коптер. На фото к этой статье — та самая собака, из пасти которой я буквально вырвал свой Миник!
15. Не вылетайте из окна или в форточку. При потере сигнала пульта, что не редкость рядом со зданиями, дрон поднимется на высоту возврата и, вернувшись по координатам взлёта, сядет на крыше или свалится вниз, задев какие-нибудь конструкции. Также не исключён риск краша об оконную раму при глюке GPS, порыве ветра или резком управлении.
16. Следите за тем, в каком режиме Вы управляете дроном. Я нередко ловлю себя на том, что перешёл в спорт режим и ношусь между домами и деревьями без всяких датчиков.
17. Не летайте без защиты винтов рядом с людьми. Глюк GPS, порыв ветра или ошибка управления может привести к травмам. И вообще, постарайтесь не летать над людьми.
18. Не используйте интеллектуальные режимы в лесу и в городе, где дрон может столкнуться с каким либо объектом при облёте.
19. Не снижайте скорость при пролётах через узкие места с надголовной средой — окна, трубы, под мостами, через салон автомобиля, под упавшими деревьями, насквозь опоры ЛЭП и т. д. Датчик может определить помеху снизу и коптер рванёт резко вверх.
20. Всегда надевайте защитную крышку камеры при транспортировке дрона в кейсе, чехле или в кармане, чтобы не заляпать камеру и не сломать подвес стабилизатора.
Будьте внимательны, осторожны и готовы ко всему — тогда количество нештатных ситуаций будет меньше. Пишите свои наблюдения и рекомендации по эксплуатации, пилотированию и съёмке с Мавика Мини в комментариях. Посмотрите мои фотографии с этого квадрокоптера в Инстаграм по хештегу #фото_города_с_воздуха.
Хороших Вам полётов и удачных кадров!
Введение
Первые шесть уроков рассматривают конструкторские соображения, лежащие в основе создания специального многомоторного БПЛА/Дрона. 7 урок, не раскрывает аспектов сборки, а описывает ряд дополнительных аксессуаров/устройств, используемых для реализации полёта от первого лица (FPV) и управления на большом расстоянии.
Эта статья больше ориентирована на применение радиоуправления в «полевых условиях»; в отличие от полёта внутри помещений или в местах, где розетки могут обеспечить питание. Обратите внимание, урок охватывает только очень небольшую часть информации, необходимой для правильного понимания FPV/Систем дальнего радиуса действия, и предназначена главным образом для ознакомления читателя с понятиями, терминами, продуктами и принципами, лежащими в основе FPV и управления дроном на больших расстояниях.
Вид от первого лица (fpv)
Вид от первого лица (FPV — First Person View) — одно из основных движущих сил стремительно растущей популярности мультимоторных БЛА, позволяющая получить совершенно иную перспективу («вид с высоты птичьего полёта») нашей планеты и само ощущение полёта. Несмотря на то, что добавление камеры к БПЛА не является чем-то новым, относительная простота управления, низкая цена и широкий ассортимент дронов, позволяют легко купить или создать беспилотный летательный аппарат с камерой.
Вид от первого лица (FPV) в настоящее время реализуется посредством предустановленного на коптер тандема, состоящего из FPV камеры и видеопередатчика, что позволяет в режиме реального времени отправлять видео пилоту или ассистенту. Обратите внимание, что на рынке предлагаются готовые, либо полуготовые FPV системы, где в свою очередь, готовые FPV системы обеспечивают уверенность пользователя в том, что все её элементы совместимы друг с другом.

Видеокамера
- Практически любая видеокамера, которая имеет возможность подключения к видеопередатчику, может использоваться для реализации FPV полёта, тем не менее, важно учитывать вес, так как многомоторные БЛА постоянно борются с гравитацией и не имеют преимуществ крылатого воздушного судна для обеспечения дополнительного подъёма.
- Видеокамеры бывают самых разных форм и размеров, а также могут иметь различный потенциал в качестве съёмки, тем не менее в настоящее время далеко немногие адаптированы специально для БПЛА. Из-за этих ограничений по размеру, весу и производительности, большинство камер используемых в многомоторных FPV-системах, пришло от «экшн-камер», а также от приложений видеонаблюдения и индустрии безопасности (например, скрытые камеры).
- Большие камеры, такие как DSLR (зеркальные) или крупные видеокамеры, обычно используются профессионалами, но из-за своего веса требуемый дрон имеет тенденцию быть довольно большим.
- Некоторые видеокамеры могут питаться напрямую от источника питания 5В (полезно, поскольку большинство контроллеров полёта также работают при 5В, питаясь от BEC), в то время как другим может потребоваться 12В или даже своя собственная встроенная аккумуляторная батарея.
- Самой популярной камерой, используемой в настоящее время на многомоторных БПЛА является — GoPro. Это связано с их прочностью, небольшими размерами, высоким качеством видео/фото, встроенным аккумулятором, широким ассортиментом аксессуаров и доступностью по всему миру. Камеры GoPro также имеют USB выход, который можно использовать для передачи видео, а некоторые даже имеют встроенный WiFi модуль для передачи видео на короткие расстояния.
- Учитывая успех GoPro, многие другие производители создали свои собственные аналогичные линии спортивных/экшн-камер, но их характеристики, цена, и качество разнятся. Обратите внимание, что если вам потребуется 3D-видео, вам понадобятся две камеры и видеопередатчик, способный передавать два сигнала.

Подвес
Система подвеса включает в себя механическую раму, два или более мотора (обычно до трёх для панорамирования, наклона и крена), а также датчики и электронику. Камера установлена таким образом, что двигатели не должны обеспечивать угловое усилие (крутящий момент), чтобы держать камеру под фиксированным углом («сбалансированным»).
Оси, о которых идёт речь, позволяют панорамировать, наклонять или поворачивать камеру. 1-осевая система, которая не имеет собственного датчика, может рассматриваться как система панорамирования или наклона. Наиболее популярная конструкция включает в себя установку двух моторов (обычно BLDC двигатели, специально разработанные для использования с подвесами), которая управляет наклоном и поворотом камеры. Следовательно камера всегда обращена в сторону передней части дрона, что также гарантирует, что пилот не будет дезориентирован, если камера будет смотреть в одном направлении, а передняя сторона беспилотника — в другом.
3-осевой подвес добавляет панорамирование (влево и вправо) и наиболее полезен в тандеме с двумя операторами, когда один человек управляет дроном, а другой может независимо управлять камерой. В такой конфигурации для двух человек также может быть задействована вторая (фиксированная) курсовая камера для пилота. Как правило, существует один из двух видов карданных систем:
Бесколлекторный подвес
- Бесколлекторные моторы постоянного тока (BLDC — Brushless Direct Current Motor) или (PMSM — Permanent Magnet Synchronous Motor) или (Вентильные электродвигатели (ВД)) — обеспечивают быструю реакцию с минимальной вибрацией, однако требуют присутствия отдельного (и специализированного) бесколлекторного контроллера постоянного тока.
- Чтобы автоматически поддерживать уровень камеры, где-то вокруг камеры (обычно под её креплением) устанавливается инерциальный измерительный блок (IMU), состоящий из акселерометра и гироскопа, так чтобы положение камеры (относительно земли) можно было отслеживать. Показания блока отправляются на отдельную плату бесколлекторного контроллера постоянного тока (часто устанавливаемую прямо над подвесом), который вращает моторы, так, что положение камеры остаётся в определенной ориентации, несмотря на любое перемещение дрона.
- Сама плата контроллера включает в себя встроенный микроконтроллер. Бесколлекторный контроллер постоянного тока карданного подвеса обычно можно подключить непосредственно к каналу на приёмнике (в отличие от контроллера полёта), поскольку он реагирует на изменения ориентации камеры, а не ориентации БПЛА, и, следовательно, не зависит от контроллера полёта.
- Обратите внимание, что поскольку GoPro является популярной экшн-камерой, большинство бесколлекторных подвесов созданы для использования с одной или несколькими моделями GoPro (исходя из размеров GoPro, центра масс, местоположения камеры и т.д.). Вы также заметите, что BLDC подвесы почти всегда имеют демпфирование, которое сводит к минимуму вибрацию, передаваемую от дрона к камере.

Радиоуправляемый сервоподвес
- В основе радиоуправляемого сервоподвеса — сервопривод, как правило, предлагает более медленное время отклика, по сравнению с бесколлекторными подвесами, и излишнюю вибрацию. При этом сервосистемы значительно дешевле бесколлекторных, а 3-контактные сервоприводы в большинстве случаев могут быть подключены непосредственно к полётному контроллеру, что позволяет воспользоваться встроенным в ПК — IMU, для определения уровня относительно земли, и последующего перемещения сервоприводов.

Видеопередатчик (vtx)
В настоящее время немногие контроллеры полёта (за исключением готовых к работе БЛА массового потребительского рынка) имеют встроенный видеопередатчик, это означает, что обычно требуется отдельное VTX дооснащение. Видеопередатчики, используемые в беспилотном хобби, в настоящее время популярны, так как они лёгкие и маленькие. Можно использовать и другие видеопередатчики сторонних разработчиков, но, в таком случае должны учитываться некоторые важные соображения касательно подключения питания (может потребоваться настройка, если устройство принимает питание только от «Barrel» разъёма), а также входного напряжения; Если видеоустройство работает при напряжении, которого нет на борту вашей сборки, где, вам может потребоваться дополнительная электроника, например, регулятор напряжения. Видеопередатчики не затрагивающие беспилотное хобби, редко удовлетворяют по таким параметрам как вес или размер, и как правило заключены в защитный кейс (а иногда, неоправданно тяжелый).

Мощность видеопередатчика
Видеопередатчики обычно рассчитаны на определенную выходную мощность, но не следует полагать, что кто-либо может использовать любую номинальную мощность, доступную на рынке. Беспроводные частоты и мощность тщательно отслеживаются и регулируются, поэтому настоятельно рекомендуется ознакомиться с правилами беспроводной связи в стране где вы находитесь.
Мощность, которую потребляет видеопередатчик, напрямую влияет на максимальную дальность его сигналов. В Северной Америке для работы беспроводного передатчика, который потребляет энергию выше определенной (в Ваттах), требуется, чтобы оператор имел лицензию радиолюбителя (HAM). Например, в Канаде, FPV оператору большой дальности обычно требуется пройти, по крайней мере, «Базовый квалификационный тест радиолюбителя», чтобы работать на мощности, необходимой для беспроводных приложений большой дальности.
Если вы не имеете никакой квалификации, настоятельно рекомендуется использовать видео передатчик менее 200 мВт, чтобы избежать риска судебных исков (власти могут связаться с вами, если ваш сигнал начнет мешать другим беспроводным сигналам).
Питание для видеопередатчика обычно подается от BEC от одного из ESC, который также питает остальную часть электроники. Если вы подозреваете, что вся электроника потребляет больше тока, чем может обеспечить один BEC, вы можете использовать BEC от второго ESC для питания VTX. Использовать отдельную батарею для питания видеопередатчика не рекомендуется.
Частоты/каналы видеопередатчика
Большинство видеопередатчиков работают на одной из ниже перечисленных частот. Обратите внимание, что, поскольку вы, вероятно, уже будете использовать стандартную аппаратуру управления, которая работает на определенной частоте, правильным будет выбрать видеопередатчик так, чтобы их частоты не совпадали. Например, если ваше пульт управления работает на частоте 2.4 ГГц, вам следует обратить внимание на видеопередатчик с рабочей частотой: 900 МГц, 1.2ГГц или 5.8ГГц.

900мгц (0.9ггц)
- Низкочастотный сигнал легче проникает через стены и деревья
- DIY антенны легко сделать, потому что низкие частоты подразумевают большие антенны
- Качество изображения не такое хорошее, как на 5.8ГГц
- Может оказать негативное влияние на GPS приёмники
- Считается «старой» технологией
- В целом, лучший для среднего диапазона
2ГГц (от 1.2 до 1.3 ГГц)
- Используется для дальних FPV полётов, поскольку предлагает хорошее расстояние
- Много разных антенн на рынке
- Частота, как правило, используется множеством других устройств
- Стены и препятствия оказывают большее влияние, чем более низкая частота
- Средний/длинный диапазон
4ГГц (от 2.3 до 2.4ГГц)
- Используется для FPV на большие расстояния с небольшим количеством препятствий
- Одна из наиболее широко используемых частот для беспроводных устройств
- Доступны многие аксессуары (антенны, передатчики и т.д.)
- Не следует использовать рядом с параллельно работающими на аналогичной частоте RC передатчиками или другими устройствами, которые могут создавать помехи.
- Может работать с другими частотами, но не будет рассмотрено в этом разделе.
8ГГц
Как вы, могли, заметить, многие обычные беспроводные устройства работают на частоте 2.4ГГц (беспроводные маршрутизаторы, беспроводные телефоны, Bluetooth, устройства для открывания гаражных ворот и т.д.). Во многом это связано с тем, что в государственных нормативных актах Федеральной комиссии связи, определено, что полосе частот вокруг этого диапазона не требуется лицензия для работы; то же самое для 900МГц, 1.2ГГц и 5.8ГГц (в пределах определенного диапазона мощности). К без лицензионному частотному диапазону относится так называемый свободный ISM диапазон (с англ. Industrial, Scientific, Medical: индустриальный, научный и медицинский диапазон), занимает полосу частот: от 2400 до 2483.5МГц в США и Европе и от 2471 до 2497МГц в Японии. Это означает, что любой потребитель может приобрести беспроводное устройство, которое работает на одной из этих частот, не беспокоясь о правилах или рекомендациях. Более подробную информацию о любительском распределении радиочастот можно найти в Википедии.
Разъёмы видеопередатчика
Не все видеопередатчики имеют одинаковые разъёмы, поэтому важно знать, какой разъём установлен в выбранной камере, а также, посмотреть, возможно ли подключение и работа с выбранным видеопередатчиком. Самые популярные разъёмы — композитные, мини/микро USB и 0.1-дюймовые разъёмы (аналоговые). На рынке имеется ряд адаптеров/переходников, например: 0.1″ FPV Tx разъём — miniUSB для использования с камерой GoPro, что значительно упрощает использование таких продуктов.
Некоторые видеопередатчики также могут иметь аудиовход, тем не менее в большинстве случаев шум издаваемый силовой установкой будет заглушать любой звук, который вы надеетесь записать. Если вам нужен звук, обязательно расположите микрофон как можно дальше от моторов (потребуется немало испытаний, чтобы найти макс. оптимальное место) и выберите совместимый приёмник.
Антенна видеопередатчика
Антенны видеопередатчика, используемые на беспилотных летательных аппаратах, имеют тенденцию быть либо «Duck», либо «Whip». Duck антенны являются наиболее распространёнными и имеют преимущество в том, что они являются всенаправленными, компактными, недорогими и остаются неподвижными во время полёта из-за их небольшого профиля.
Выбор антенны должен соответствовать частоте видеопередатчика. Более высокие частоты требуют небольших антенн, однако передаваемые сигналы испытывают большие трудности при прохождении через препятствия. Низкие частоты менее подвержены помехам, но требуют больших/длинных антенн. Направленная антенна не очень часто используется для передачи видео, так как БПЛА может фактически находится в любой ориентации в трёхмерном пространстве. В идеале антенна должна быть расположена где-то на БПЛА, где нет источников других беспроводных сигналов или электрических помех.

Видеоприёмник (vrx)
Видеоприёмник имеет тенденцию быть немного (физически) больше и тяжелее, видеопередатчика, потому что приёмник как правило неподвижен (подключён к экрану), в то время как передатчик устанавливается на дроне и, как таковой, должен быть маленьким и лёгким. Чтобы сэкономить место, некоторые производители ЖК-дисплеев включают в свои дисплеи стандартно частотные беспроводные приёмники.
Многие FPV энтузиасты устанавливают на свои FPV очки антенны типа «Clover Leaf» или «Pinwheel», что позволяет им ориентировать свою голову в направлении беспилотника и тем самым добиваться максимально мощного сигнала. Некоторые производители FPV очков также поддержали эту тенденцию и стали включать в комплектацию своих очков беспроводной видеоприёмник и антенну.
Очевидно, что частота, на которой работает видеоприёмник, должна соответствовать частоте передатчика. Некоторые модели приёмников, однако, предлагают широкий выбор каналов (по одному), что делает их совместимыми с различными видеопередатчиками. Выход видеоприёмника имеет тенденцию быть либо композитным (наиболее распространённый), либо HDMI. Что подключить к выходу (видео дисплей), решать вам, и некоторые варианты описаны ниже. Питание приёмника в полевых условиях всегда предполагает использование батареи, которая либо выдает выходное напряжение соответствующее рабочему напряжению приёмника, либо батареи, которая подключена к регулятору напряжения для обеспечения требуемого. Обратите внимание, на то, что нет видеоприёмников «большой дальности», поскольку диапазон сигнала зависит от мощности передатчика и правильно выбранной антенны.

Антенна видеоприёмника
Антенны, используемые на видеоприёмниках, могут быть всенаправленными (способными принимать сигнал с любого направления) или направленными. Наиболее распространённые антенны, которые можно встретить на видеоприёмнике это: Duck антенна, Cloverleaf/Pinwheel или, в редких случаях, направленная (например, «Yagi»). Направленная антенна будет актуальна только в том случае, когда БПЛА будет летать в определенном направлении по отношению к оператору, а дрон всегда будет «перед» антенной, для того чтобы не потерять сигнал. Ситуации могут включать в себя исследование конкретной зоны (например, поля) или области, которая находится на расстоянии от оператора.

Видеодисплей
Жк монитор (lcd монитор)
- При рассмотрении ЖК монитора важно знать различие между настольным/компьютерным ЖК монитором или ЖК телевизором и тем, который предназначен быть портативным. Телевизионный/компьютерный монитор почти всегда имеет разъём питания, совместимый со стандартным компьютерным кабелем питания (потребляет переменный ток напрямую), что делает его очень сложным для использования с АКБ. ЖК/OLED дисплей, который должен быть более портативным, зачастую потребляет постоянный ток и требует внешнего трансформатора для подключения к сети (A/C).
- Размер, частота обновления и качество отображения дисплея, используемого для FPV применения варьируются от небольших мониторов с зернистыми изображениями, те что обновляются несколько раз в секунду, до больших дисплеев, которые в сочетании с правильным видеопередатчиком и приёмником, отображают большие HD изображения без каких либо явных задержек. Имейте в виду, что любой выбранный вами 2D-дисплей должен быть подключен к источнику питания и установлен, либо внутри базовой станции БПЛА (описанной ниже), либо посредством крепления FPV монитора на аппаратуре управления.

Fpv очки
- 2D-очки широко используются в FPV из-за их более доступной цены, совместимости с одним источником видеосигнала (с одной видеокамеры) и простоты использования с внешним аккумулятором. Некоторые модели включают в себя видеоприёмник; комплекты приходят с камерой, видеопередатчиком, FPV очками (с встроенным видеоприёмником) и внешним аккумулятором, а также обеими антеннами.
- Качество видео, предлагаемое недорогими FPV очками, может быть довольно низким, поэтому если бюджет имеет значение, примите во внимание, что вы можете получить лучшее впечатление от ЖК-монитора большего размера по той же цене, что и FPV очки.

Отслеживание головы
- Отслеживание головы по существу тоже самое, что и отслеживание движения, а именно, измерение трехмерной ориентации/углов в отличие от линейного движения. Сенсорный комплекс составляют чипы MEMS акселерометра, гироскопов или инерциальных измерительных модулей (IMU). Датчики устанавливаются (или встраиваются) в FPV/VR очки и отправляют данные в микроконтроллер для интерпретации данных датчика в виде углов, который затем отправляет данные, либо посредством аппаратуры управления (для моделей более высокого уровня), либо через отдельное беспроводное передающее устройство. Идеальная система отслеживания головы совместима с передатчиком, таким образом углы могут быть отправлены с помощью передатчика по двум свободным RC каналам.
![]()
3d/виртуальная реальность
- Occulus Rift, Samsung Gear, Morpheus, VR-очки на базе смартфона и множество других 3D/VR-дисплеев с головным креплением могут быть адаптированы для использования с беспилотниками. Несмотря на то, что эти устройства обычно создаются для трёхмерных компьютерных/консольных игр или в качестве альтернативы телевизору, эти устройства изначально совместимы с 3D и зачастую имеют встроенные датчики трекинга головы, становясь всё более интересными для беспилотного FPV сообщества.

Smart устройства
- Смартфоны, планшеты или ноутбуки могут быть использованы для отображения видео в режиме реального времени. Их батареи являются встроенными, а сами устройства лёгкие. Сложность использования интеллектуальных устройств заключается в том, что большинство приёмников не предназначены для приёма видеосигнала от беспроводного видеоприёмника (один из двух проводной или беспроводной). Ноутбук или планшет с встроенной или USB-видеокартой может получать нормальное композитное видео. Смартфон в настоящее время лучше всего работает с видео, отправляемым по Wi-Fi (от Wi-Fi камеры к Wi-Fi адаптеру). Использование Wi-Fi видеосигнала GoPro и мобильного приложения является одним из самых простых способов реализации FPV, однако стоит отметить, что диапазон сигнала Wi-Fi камеры сильно ограничен (10-20 метров). Поскольку смартфоны широко распространены, а беспилотники — последний писк моды, производители регулярно выпускают новые продукты, из которых извлекают выгоду, поэтому прежде чем принять решение, хорошенько подумайте.

Экранное меню (osd)
- Экранное меню (OSD) позволяет пилоту видеть различные сенсорные данные, отправляемые с дрона. Одним из самых простых способов выведения данных на экран является использование камеры с аналоговым выходом и размещение экранной платы между выходом камеры и видеопередатчиком. Плата OSD адаптера имеет входы для различных сенсоров и будет накладывать данные на видео, таким образом пилот получит видео с уже наложенными данными телеметрии.

Соображения касательно расстояния удаления
- Как вы уже успели заметить, работа на большом расстоянии зависит главным образом от мощности передатчика (аппаратуры управления, а также видео, если применимо). Обычно RC-передатчики включают в себя RF-систему, состоящую из джойстиков и переключателей, электроники и RF-передатчика, и менее дорогих RC-элементов, эта система почти всегда представляет собой единое целое. Модели более высокого уровня часто имеют радиочастотный модуль, который можно заметить в виде коробки, расположенной на тыльной стороне аппаратуры управления. В Северной Америке это также законное требование, чтобы БПЛА оставался в поле зрения пилота (для информации). Тем не менее законы меняются, поэтому лучше проконсультироваться, прежде чем пытаться выполнять беспилотные операции на больших расстояниях.
Питание
Бпла/дрон
Ваш БПЛА/Дрон состоит из множества различных частей, каждая из которых требует определенного напряжения. Наиболее распространенная электроника, которую вы найдете в FPV системе или дроне дальнего действия, включает в себя:
- Двигатели: большинство двигателей БПЛА среднего размера, как правило, работают при напряжении 11.1В или 14.8В.
- Контроллер полёта, приёмник, GPS: в идеале они должны получать питание от BEC от одного из ESC.
- Приёмник отслеживающий положение головы: он будет также работать от BEC.
- Сервоподвес: Сервоприводная система подвеса может получать питание от одного из BEC на ESC и работать при напряжении 5В.
- BLDC подвес: Некоторые BLDC подвесы могут подключаться к зарядному разъёму основного аккумулятора, в то время как другим может потребоваться определенное напряжение. Проверьте характеристики подвеса, который вы покупаете.
- Камера: Камеры, используемые для FPV полёта, имеют тенденцию работать при 5В (от BEC) или 12В (от основного аккумулятора). Большинство экшн-камер имеют собственную встроенную батарею.
- Видеопередатчик: Большинство работает при 5В и может питаться от BEC.
- Дополнительная электроника (освещение, парашют и т.д.): 5В.
Рекомендуется чтобы в БПЛА была только одна основная батарея, и вам следует рассмотреть возможность использования АКБ 11.1В или 14.8В на дроне среднего размера. Если не один ESC не имеет BEC, вам понадобится внешний 5В стабилизатор напряжения для питания электроники, и убедитесь, что он сможет обеспечить достаточный ток для всего.
Пилот
В то время как обычному пользователю беспилотника нужно беспокоиться только о работоспособности аппаратуры управления, пилот полноценной FPV установки может в конечном итоге переносить большие АКБ, и разнообразное дополнительное оборудование.
- Портативная аппаратура управления: Большинство пультов по умолчанию питаются от батареи типа «AA» (4 × AA или 8 × AA), но для FPV может потребоваться питание аппаратуры от внешнего АКБ.
- Дополнительный RF-передатчик: Если вы не используете RF-передатчик/Приёмник, входящий в комплект поставки пульта дистанционного управления, модели более высокого уровня обычно имеют питающий выход, к которому можно подключить этот модуль. Кроме того, вы можете запитать его к внешней аккумуляторной батареи, питающей пульт дистанционного управления.
- Приёмник отслеживающий положение головы: Обычно это блок может питаться от 5В.
- Видеоприёмник: Большинству требуется 12В, но часто они имеют довольно широкий диапазон входного напряжения. Чаще всего приёмник поставляется с сетевым адаптером, который вы не будете использовать в полевых условиях. Проверьте диапазоны входного напряжения, чтобы увидеть, можете ли вы использовать одно напряжение для питания передатчика и приёмника (например, 7.4В или 12В).
- Видеодисплей: Обязательно выберите портативный ЖК-дисплей с «Barrel» разъёмом, что позволит использовать батарейный блок для ввода. FPV очки, как правило, также имеют вход под «Barrel» разъём, но не забудьте проверить. Наиболее распространенное напряжение для портативных ЖК-дисплеев составляет 12В, что может быть не самым лучшим для других устройств.
- Антенный трекер: Описан ниже. Это моторизованное устройство часто состоит из радиоуправляемых серводвигателей, микроконтроллера и дополнительных сенсоров /электроники. Существует очень мало коммерческих систем для рынка беспилотного хобби, поэтому если вы будете заниматься проектированием и созданием такой системы, вам нужно будет разработать настройку питания.
Базовая станция
Как уже было сказано выше, есть много оборудования, которое пилоту необходимо переносить и питать, и что оно может быть очень громоздким. Базовые станции часто используются для освобождения оператора от этого бремени/неразберихи и могут состоять из любого количества различного оборудования и отсеков, перечисленных ниже. Не трудно представить, что от того, как хорошо собрана базовая станция, проведены жгуты проводов, соединяющих все эти устройства вместе, зависит исход подготовки к полёту.

Базовая станция может включать в себя:
- Основную батарею, возможно, используемую для питания ЖК-монитора и/или FPV очков и, возможно, видеоприёмника.
- Вспомогательную батарею для передатчика и/или видеоприёмника.
- Крепление для ЖК-монитора и/или место для FPV очков.
- Крепление для видеоприёмника.
- Место для хранения аппаратуры управления.
- Крепление для антенны большой дальности (или место для переносной направленной антенны)
- Место для зарядного устройства для основного аккумулятора (ов).
- Место для запасных частей для дрона (пропеллеры, моторы, аккумуляторы, элементы рамы).
«Базовая станция» не обязательно является коммерчески произведенным продуктом, который легко может быть использован с любым беспилотным применением, напротив, она может быть спроектирована и построена пилотом-любителем самостоятельно. Обычно создание базовой станции начинается с выбора прочного футляра для переноски (например, Pelican или Nanuk), хотя также можно использовать/адаптировать рюкзак с жесткой рамой. Часто для установки антенны повыше от земли используется штатив.
Антенный трекер
Антенный трекер — это электромеханическое устройство, которое отслеживает положение дрона в трёхмерном пространстве, используя GPS координаты, и, зная местоположение GPS трекера, направляет антенну в сторону беспилотника. Антенные трекеры обычно используются в дальнобойных миссиях, и на рынке не так много коммерческих продуктов. Трекер состоит из GPS приёмника, компаса (а иногда и IMU), микроконтроллера, приёмника данных (для приёма GPS-координат дрона), одного поворотного и одного наклонного мотора, механической рамы, направленной антенны и аккумуляторной батареи. Чтобы уменьшить отрицательное влияние препятствий, системы антенного трекера поднимаются над землей с помощью штатива.

Fpv rc – пульт для дальних полетов и антенное хозяйство
Если вы увлекаетесь радио моделизмом, то статья может вам показаться интересной. Расскажу о том как я сделал свою “наземную станцию” для дальних полетов с FPV.

Уже не помню сколько было вариантов. Начиналось все с ноутбука, камеры захвата изображения, длинных проводов до машины которая питала все это хозяйство. Просто придти и полетать в поле было нельзя, нужно было тщательно готовиться и проверять по десять раз что бы ничего не забыть. Надоело.
Для полетов без камеры аппаратуре FlySky FS-T6 вполне хватало т.к. когда пропадала видимость самолета с земли тогда начинались проблемы со связью. Перебои начинались уже на 400-500 метрах. Когда была установлена fpv камера проблемы со связью стали сильно досаждать.В начале был куплен Wi-Fi бустер на 2 вата, потом заменен fpv приемник/передатчик с 5.8Ghz 200mWt на 1.2Ghz 600mWt. Но тут начались проблемы с смежными частотами RC управления на 2.4Ghz и fpv 1.2Ghz. Частично они решились переходом на 5 канал видео связи но наводки fpv передатчика заметно снижали дальность. Пришлось изобретать направленные антенны: Патч на 1.2Ghz и бабочка на 2.4Ghz. Обо всем по порядку.
Аппаратура FS-T6 имеет отсек для пальчиковых батареек. Серьезную нагрузку пальчики не выдержат. В отсек хорошо поместился Li-Po аккумулятор 1500mA/h 11.1v которого вполне хватает на несколько долгих полетов. Пришлось сделать пару отверстий для креплений и притянуть его стяжками. Питающий провод был подпаян к клеммам аппаратуры. За одно был выведен из корпуса провод питания от выключателя. Таким образом я могу при включении аппаратуры сразу подавать питание на все дополнительные потребители. Удобно!

Пока разобранный передатчик не был обратно собран нужно сделать еще одну штуку – выкинуть штатную антенну-сосиску, рассверлить отверстие где была старая антенна, поставить в нее купленный высокочастотный разъем “папа” и подпоять его к передатчику. После сборки будет выглядеть так:

Пульт был закреплен на куске винилового сайдинга 4-я стяжками. Далее было насверлено множество отверстий для крепления компонентов:
- приемник 5.8ghz
- приемник 1.2Ghz
- wi-fi бустер 2.4Ghz
- кастом преобразователь 12v – 5v (для питания бустера)
- 5” дисплей для аналогового сигнала
- площадка для крепления антенн
При подключении никаких хитростей нет. Нужно только прикупить 3 высокочастотных переходника-удлинителя типа мама-мама для подключения передающего сигнала от пульта к бустеру и от бустера к антенне; от fpv приемника к антенне.
К слову сказать, если вы любите летать вокруг себя, то направленная антенна вам не нужна. Летайте на штатных “сосисках” или “клеверах”. Они дают ровный сигнал во все стороны и не придется вертеться в след за самолетом, но дальность приема сильно упадет.
Купленный мною бустер оказался с питанием от 5 вольт.

Подключать напрямую к 12 вольтам не хотелось. Пришлось изобретать преобразователь.

Преобразователь собран на микросхеме KP142EH5A и посажен на радиатор. Схема преобразователя очень проста:
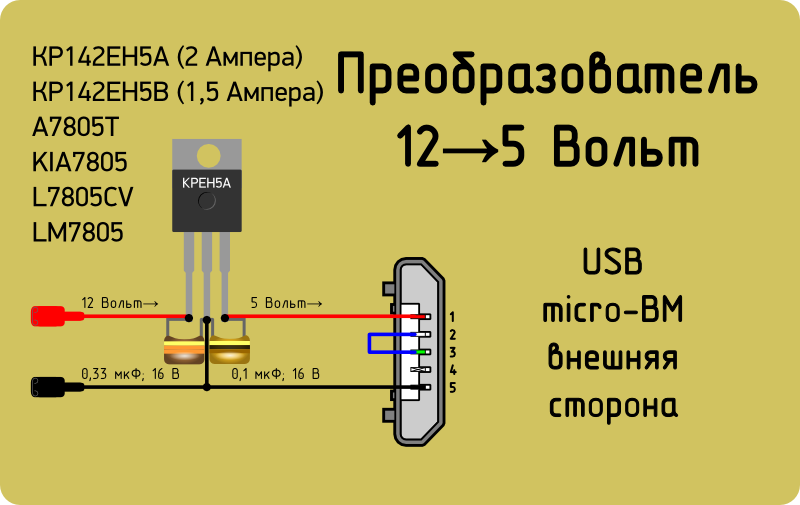
Видео приемники подключены к дисплею одновременно. Оказалось очень удобно т.к. дисплей имел два входа. Переключениями между входами штатно осуществляется нажатием кнопки V1/V2 на самом дисплее.

Антенное хозяйство выполнено на куске одностороннего текстолита. Обклеяно скотчем, что бы не ржавело. Можно было и покрасить…

Направленная патч антенна на 1.Ghz с высоким коэффициентом усиления выполнялась по этой схеме:
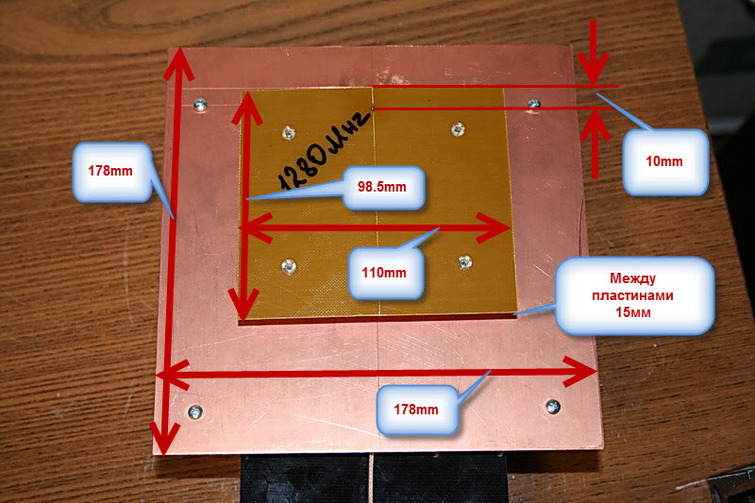
Расстояние между пластинами 11.6мм. Перемычки из диэлектрика. На задней стороне припаян высокочастотный разъем “папа”.

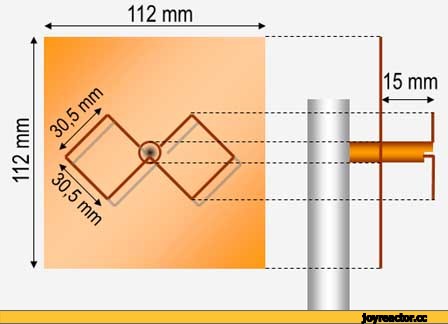
Широкополосная направленная антенна бабочка для wi-fi делалась по схеме:

Конструкция получилась увесистая (можно ею отбиваться в подворотне), но напряжения при удержании руках не испытываю. Всегда можно накинуть шнурок на проушину аппаратуры.
Xk-innovations x380
- Дальность полета:
1000 м - Время полета:
30 мин - GPS:
есть - Камера:
опционально
По качеству съемки этот девайс лишь чуть-чуть уступает крупноразмерным собратьям. Картинку здесь тоже можно писать в 4K-разрешении, но только с частотой 30 кадров/с. Видео получается очень плавным, так как здесь тоже присутствует трёхосевой подвес, пусть и достаточно маленький.
Также на помощь приходит качественный GPS-чип, благодаря которому дрон практически идеально удерживает заданную позицию. Но больше всего покупателя должны порадовать многочисленные автоматические режимы съемки. Они позволяют квадрокоптеру летать вокруг объекта съемки, взмывать над ним высоко в воздух и даже делать 30-мегапиксельные панорамы окружающей местности.
Интересно, что этим дроном можно управлять и со смартфона, используя сеть Wi-Fi. Но делать это следует только для вышеупомянутой селфи-съемки. Дальность полета в таком режиме варьируется от 50 до 80 метров.
- Дальность полета:
5000 м - Время полета:
35 мин - GPS:
есть - Камера:
опционально
Должно быть, вы видели документальные фильмы о дикой природе, где съемка ведется с достаточно большой высоты. Сейчас для получения таких кадров используются квадрокоптеры с большим радиусом действия. Если телеканал или киностудия не бедствуют, то им доступна покупка DJI Matrice 600.
Это гексакоптер, в состав устройства входят шесть винтов. Такое их количество требуется для поднятия тяжелой камеры – максимально девайс способен лететь с 6 кг подвешенного веса. Удивительно, что ёмкость использующегося здесь аккумулятора невелика – она не превышает 4500 мАч.
Тем не менее, такая батарея помогает летать в течение 35 минут (без нагрузки). Если же коптер нагрузить по полной программе, то время полета со стандартным аккумулятором сокращается до 16 минут. Впрочем, никто не запрещает приобрести пару батарей повышенной ёмкости.
Почему же для съемки дикой природы используется именно этот гексакоптер? Всё очень просто: девайс способен улетать на 5-километровое расстояние. Это позволяет эффектно снять, допустим водопад, после чего улететь вдаль против течения реки.
Стоит такой аппарат более 400 тысяч рублей. И это без камеры, которую придется покупать самостоятельно! Также придется расщедриться на трёхосевой подвес. Без него имеет смысл использовать DJI Matrice 600 только ради транспортировки груза.
Аналогия лампочки
Начнем с простой аналогии для понимания принципа работы радиосвязи. Представьте, что вы стоите посреди поля в полной темноте. У вас есть квадрокоптер, на который вы повесили лампочку. Вы ее включили, дрон взлетел и начинает летать вокруг вас. Теперь вашей целью будет поставить около себя камеру, которая всегда должна улавливать свет от лампочки квадрокоптера, при том, что он летает.
Как вы это сделаете? Сделаете лампу яркой, чтобы она лучше светила и камере было проще видеть свет? Будете использовать объектив на 360 градусов? Или может несколько объективов с поворотными механизмами? Смысл этой аналогии в том, что свет, который излучает лампа, является формой электромагнитного излучения, подобного радиоволнам. Так работают и антенны, они должны уловить радиоволны.
Мы применим эту аналогию к системе видеопередачи с квадрокоптера:
- Интенсивность источника света представляет собой выходную мощность VTX (измеряется в милливаттах или мВт/mW).
- Тип источника света (лампочка, фонарик, флуоресцентный свет и т. д.) — это тип антенны на видеопередатчике.
- Тип объектива на камере, — это тип антенны на вашем шлеме или очках.
- Чувствительность камеры (часто выраженная в мегапикселях) — это чувствительность вашего шлема или очков.
Целью антенны является преобразование осциллирующей электрической энергии в электромагнитное излучение и наоборот: преобразование электромагнитного излучения в колебания электрической энергии в цепи.
Электромагнитное излучение — это научный термин для «радиоволн», это физическое «вещество», которое несёт видео, звук и данные по радиоволнам.
В обычном квадрокоптере есть две радиосистемы: система радиоуправления для управления дроном и видеосистема для трансляции видео через FPV камеру.
Передающими элементами этих двух систем будет радиопередатчик, который вы держите в руках (пульт), и передатчик видео на борту дрона, который называется видеопередатчик или VTX. Принимают сигналы приемники.
Более простое объяснение — вы поворачиваете стик, сигнал с пульта отправляется на приемник, который есть в квадрокоптере, он обрабатывает сигнал. Камера на дроне отправляет свой сигнал на видеопередатчик, который находится на борту квадрокоптера, он отправляет этот сигнал в приемник ваших очков или шлема и вы видите видео.
Давайте поговорим конкретно о видеосистеме квадрокоптера. В этой системе передатчик видеосигнала принимает аналоговый видеосигнал от камеры в качестве входного сигнала и преобразует его в импульсы электрической энергии, которые колеблются 5 800 000 000 раз в секунду или 5,8 GHz.
Эта энергия направляется в антенну, которая преобразовывает ее в очень «яркие» радиоволны 5,8 GHz. При правильной настройке и позиционировании эти волны подхватываются второй антенной, установленной на ваших очках или шлеме FPV. В зависимости от того, насколько удален ваш квадрокоптер, эти волны будут значительно «тусклее» или «ярче».
Антенна преобразует волны обратно в электрические колебания, а затем плата управления переходит к преобразованию этой энергии обратно в аналоговый видеосигнал — противоположный процесс, который происходил в передатчике квадрокоптера — после этого вы видите видео на экране шлема.
Как увеличить радиус действия таких квадрокоптеров
Все очень просто, не нужно ничего делать с дроном, разбирать его, крепить на него внешние антенны или усилители сигнала.
Вам понадобится лишь вот такой гаджет:
Это усилитель сигнала Wi-Fi, который работает в режиме ретранслятора, увеличивая зону покрытия сети.
Его можно включить в квартире и разместить у окна, если летать возле дома либо взять с собой. Штука компактная и работает от любого PowerBank, например от такого:
Можно взять с собой и летать в любом месте.
Работает все следующим образом:
1.
Собираем квадрокоптер, устанавливаем аккумулятор и включаем его.
2.
После того, как дрон создал сеть Wi-Fi, подключаемся к ней со смартфона.
3.
В приложении Mi Home, через которое осуществляется настройка Mi Amplifier, выбираем усилитель Wi-Fi и активируем функцию ретранслятора.
Теперь «стик» Xiaomi будет усиливать сеть, раздаваемую квадрокоптером.
Имейте ввиду, что держать усилитель рядом с собой будет бессмысленно. Если дрон не достанет сигналом до смартфона, то и до репитера вряд ли добьет.
PowerBank с подключенным Mi Amplifier нужно расположить между пилотом и предполагаемой зоной полетов.
Работать все это будет при условии, что квадрокоптер управляется со смартфона. Радиус работы радиопульта не увеличится.
Некоторые модели управляются при помощи пульта ДУ, но для вывода картинки для FPV используется Wi-Fi сеть. Смартфон подключается к ней и выводит изображение с камеры дрона.
Операторов радиоуправляемых устройств интересует, как увеличить время полета квадрокоптера, поскольку эта характеристика напрямую влияет на качество пилотирования. В настоящем существует несколько эффективных методов, которые существенно увеличат длительность рабочего режима девайса, повысив его производительность.
Многие коптероводы мечтают о том, чтобы их квадрокоптер имел длительное время полета. Главной причиной является нежелание постоянно менять аккумуляторы и тратить много времени на бесконечные зарядки батарей. Ниже мы рассмотрим способы для увеличения длительности работы аккумулятора беспилотника, чтобы квадролеты дольше проводили времени в полете.
Длительность полета дрона – неоднозначный параметр, поскольку он может определяться как временем «зависания» в пространстве, так и моментом, в течение которого беспилотник активно маневрирует, выполняет флипы, перевороты и т.д. Основными факторами, которые будут влиять на увеличение данного параметра, являются:
- стиль и техника самого полета;
- коэффициент полезной нагрузки дрона;
- аккумуляторы и их емкость;
- тип двигателя и роторов;
- торможение мотора с помощью опции Damped Light.
Разработчики новых профессиональных моделей уделяют немало внимания продлению полета. Об этом свидетельствует новая версия — PHANTOM 4, обзор ее читайте .
Беспилотники, особенно высокой ценовой категории, способны осуществлять полеты в нескольких режимах. Выбор конкретного режима будет приводить к увеличению или сокращению времени, проведенного дроном в воздухе. К максимальному увеличению этого параметра приводит управление коптером в режиме стабилизации. При стабилизации модель, как правило, поддерживает одинаковую скорость и высоту.
Выполнение флипов, переворотов в 360 градусов, съемка видео/фото – факторы, которые увеличивают расход заряда батареи. Обычно эти опции используют в экспертном режиме управления.
Большое значение при расходе заряда аккумуляторов играет коэффициент полезной нагрузки. Чем большей грузоподъемностью обладает модель, тем более емкими будут ее аккумуляторы. При сбросе лишнего веса сократится расход заряда батарей. Для облегчения квадрокоптера можно:
- Укоротить провода двигателей, питания, ESC.
- Отказаться от применения цилиндрических коннекторов с позолотой.
- Снять устройство для съемки видеороликов/фото (например, камеру Mobius или GoPro).
- Использовать легкие элементы при оснащении дрона (карбоновую раму, ESC и т.д.).
Ключевыми факторами, которые определяют длительность полета девайса, являются качество и емкость аккумулятора. Многие операторы полагают, что батареи максимальной емкости автоматически повышают длительность рабочего режима, однако это не совсем так. При подборе батареи нужно учесть значение тока C у литиевых аккумуляторов – данный параметр влияет на время полета.
К примеру, если оператор израсходовал 80% заряда батареи при падении напряжения к 3.5 V на 1 ячейку, то при маленьком значении C дрон будет работать от большего тока, нежели сможет дать аккумулятор. Это приведет к быстрому падению напряжения, увеличит время полета.
Устройство и принцип действия
Схема антенны «волновой канал»:
| R — | рефлектор[en]; |
| A — | активный элемент[en] (здесь — симметричный вибратор); |
| D — | директор[en]; |
| T — | траверса. |
Излучение активного диполя (красного цвета) возбуждает ток в пассивном директоре, который переизлучает волну (синего цвета), имеющую конкретный сдвиг фазы (см. пояснение в тексте). В результате суммарное излучение активного вибратора и директора (зелёного цвета) в направлении рефлектора складывается в противофазе, а в направлении директора — в фазе, что приводит ослаблению излучения в направлении рефлектора и его усилению в направлении директора.
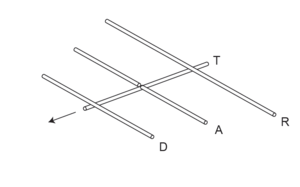
Антенна состоит из расположенных на траве́рсе (на рисунке — Т) активного (A) и ряда пассивных вибраторов — рефлекторов (R), расположенных относительно направления излучения за активным вибратором, а также директоров (D), расположенных перед активным вибратором.
Чаще всего применяется один рефлектор, число директоров меняется от нуля до десятков. Активный вибратор имеет длину около полуволны (0,5 λ), рефлектор — длину, немного большую 0,5 λ, а директоры имеют длину, меньшую 0,5 λ. Расстояния от активного вибратора до рефлектора и до первого директора составляют около 0,25 λ.
Излучение антенны можно рассматривать как сумму излучений всех составляющих её вибраторов. Ток, наведённый излучением активного вибратора в рефлекторе, наводит в нём напряжение. Для рефлектора, сопротивление которого носит индуктивный характер за счёт длины, большей 0,5 λ, напряжение отстаёт по фазе от напряжения в активном вибраторе на 270°.
В результате излучение активного вибратора и рефлектора в направлении рефлектора складывается в противофазе, а в направлении активного вибратора — в фазе, что приводит к усилению излучения в направлении активного вибратора приблизительно вдвое. Аналогично рефлектору работают директоры, однако из-за ёмкостного характера их сопротивления (что определяется их меньшей длиной) излучение усиливается в направлении директоров.
Каждый дополнительный рефлектор или директор дают прибавку усиления, но меньшую, чем предыдущий рефлектор и директор, причём для рефлектора эффект ослабления действия дополнительных элементов намного более выражен, поэтому более одного рефлектора применяют достаточно редко.

 (LiPo) - 94182PRO")





