

Начало полетов
Полеты начинаются в симуляторе — подключается пульт к компьютеру, настраивается, калибруется, выбирается модель и вперед — в небо.
Понятно что сразу хочется взять что нибудь типа такого:

Но все-таки лучше выбрать что-нибудь попроще, какой-нибудь самолет-тренер с верхним расположением крыла:

На таком тренере учишься взлетать, и приземляться, взлетать и приземляться, и когда после каждого взлета получается с вероятность 95% посадить модельна землю — можно задумываться о покупке реальной модели. От первого взлета в симуляторе до покупке модели лично у меня прошел месяц.
Симулятор позволяет сэкономить кучу денег и нервов, потому что вероятность вернуть модельна землю после первого взлета без подготовки в симуляторе практически равна нулю — ни один из моих знакомых моделистов не смог этого сделать, зато 70% из них пытлись началь без симулятора и у многих полетела и приземлилась только 3 модель — первые две пережили буквально несколько взлетов и ни 1 приземления.
В общем это моя первая статья, если тема интересная то дальше я мог бы рассказать про выбор авиамодели, покупку комплектующих, первый взлет в настоящем мире (который кстати закончился успешно), первое падение (где-то на 20 взлет), про то, как и на чем летают модели, из чего они сделаны и т.д.
Ну и напоследок небольшое видео того, к чему стремится та часть авиамоделистов, которым интересен не процесс изготовления летающих копий и не реактивные модели: так называемый 3d пилотаж под музыку на большой бензиновой модели:
Продолжение.
Вступление
Радиоуправляемыми самолетами я увлекся еще в 2002 году, живя в Праге. Первый самолет был с размахом крыла 1.2 м, двигатель 2-х тактный ДВС. Вот фрагмент видеозаписи тех времен. Однажды в 2008 году мне в руки попал акселерометр ADXL202E. Имея опыт разработки устройств на контроллере семейства MCS-51(это был Рубидиевый стандарт частоты и система сбора данных), я решил сделать автопилот для радиоуправляемой модели Mentor.
Первым делом я подключил акселерометр к контроллеру. Для простоты я выбрал отладочную плату с контроллером AT91SAM7, за удобство и простоту работы с ней. Надо заметить, что я решил не изучать ничего про автопилоты в интернете, а делать все самостоятельно с “0”, чтобы было интересней.

Итак, волей случая в 2008 году мне довелось полетать на самолете и иметь возможность использовать на борту ноутбук и свою платку с акселерометром. Сегодня любой владелецпланшета или смартфона может такой эксперимент провести самостоятельно, посколькуакселерометры имеются почти во всех устройствах.
Вот тут-то я и сделал для себя первое “открытие”, что для стабилизации тангажа акселерометр использовать можно (поскольку самолет не может слишком быстро набирать скорость или тормозиться), а вот для стабилизации крена он не годится. Поскольку при правильном развороте без скольжения боковые ускорения компенсируются креном самолета, и акселерометр их не чувствует.
Вспоминается фильм Ёлки-2, где крен самолета отслеживали по стакану воды, что у настоящего пилота вызовет недоумение. Зачем тогда изобретать авиагоризонт?Итак, в этих статьях я опишу то, что получилось у меня с 2008 по 2023 год, когда я в свободное время занимался этим проектом.
В июне 2023 автопилот был 1 раз испытан реально. Тогда еще без GPS. В 2023 году было выполнено несколько испытаний уже с GPS. Одно из удачных, в замедленном режиме, но с не успевшим найти свое положение по GPS можно увидеть тут. Стартом является выключение пульта.
Взлет полностью автоматически, потом попытка перехватить управление, когда стало понятно, что самолет летит не туда. Было выяснено, что GPS определил координаты в 1 км примерно от настоящего. Еще один успешный пролет по маршруту 17.10.2023.
Съемка неудачная, но видно взлет и посадку. Посадка в поле по причине разряда аккумулятора. Однако, красивая. Весь полет полностью автоматический. Разработка началась с проработки программной модели автопилота с использованием Borland C Builder и симулятора полетов XPlane 6.
В последствие программный код был адаптирован для контроллера почти без изменений. Автопилот ориентирован на простую стыковку со стандартными модулями радиоуправления. Как наиболее подходящий был выбран режим PPM (Pulse Position Modulation). Не со всеми современными пультами даже PPM на сегодня может работать: требуется чтобы последовательность импульсов PPM шла последовательно, а не начиналась одновременно как в некоторых современных пультах, таких как FlySky FS-16.
Хотя решение для управления от таких пультов также присутствует в программном обеспечении, но на сегодня не испытано и нуждается в отладке. Система проверена на пультах Robbie Futaba FC-16 и Art-Tech EFLY-100B. Один из недостатков — необходимость вывода из недр приемника непосредственно сигнала PPM до декодера — распределителя импульсов на рулевые машинки.
Авиамоделизм для начинающих
Статья “Авиамоделизм для начинающих” – это обзор материалов, для тех, кто делает первые шаги в авиамоделизме.
В ней даются ссылки на то, что стоит прочитать для начала, для того, что бы понять – как подступиться к этим увлекательным полетам на радиоуправляемых моделях самолетов. Перед тем как читать – рекомендую посмотреть статью Авиамодельные термины, тогда будет проще понять, о чем идет речь в статьях.
Первое с чего стоит начать – это решить, строить авиамодель самому или купить готовую. Про различные типы авиамоделей смотрите статью – Выбор авиамодели, там постарался расписать вкратце что к чему. Про авиамоделизм – статью С чего начать.
Если решили покупать – то читайте статьи про WingDragon (стоимость 4500-6000 рублей)

Статьи называются WingDragon как первый самолет и Тренер WingDragon. Это готовая к полету модель самолета (RTF), она включает в комплект 4-х канальную аппаратуру, но ее придется менять через полгодика, если не раньше. Так как в ней нет никаких настроек.
Если решили делать самостоятельно, то смотрите статью Цессна 150. Цессну легко сделать и легко научиться летать на ней.
Кроме указанных в статье деталей придется докупить зарядник, разъемы для регулятора и аппаратуру радиоуправления.
Про зарядники, разъемы и как соединить всю электонику в авиамодели можно почитать в статьях Электроника электролета и Обслуживание авиамодели.
Ваттметры и мониторы батареи описаны в статье здесь. Без ваттметра не подберешь воздушный винт, а без монитора батареи можно разбить авиамодель только потому, что закончился аккумулятор.
Про аккумуляторы LiPo, их эксплуатацию, зарядку и подготовку к первому полеты можно прочитать в статье Эксплуатация LiPo аккумуляторов.
Про выбор аппаратуры есть статья – Как выбрать аппаратуру радиоуправления. Я ее еще буду немного дорабатывать, но она и сейчас неплохо описывает – что есть и как сделать выбор.
Если кратко – то для новичка ограниченного в средствах два выбора:
Hobby King 2.4Ghz 6Ch Tx & Rx V2 (Mode 2), купить можно на и (линки на аппу). Обзор аппаратуры здесь, заодно смотрите раздел Похожие статьи (справа). Если кратко – 6 каналов, 3 микшера (дополнительные настройки), стоимость 24 бакса, программируется с компьютера, дисплея не имеет. Если брать в поле пару авиамоделей, то желательно взять с собой ноут.
Брать ее стоит, если вы не решили – ваше ли это хобби и не забросите ли его через пару месяцев. Иначе смотрим дальше.
Turnigy 9X 9Ch Transmitter w/ Module & 8ch Receiver (Mode 2) (v2 Firmware), купить так же можно на и (линки на аппу). Стоимость 55 басков. 9 каналов, можно перепрошивать разными прошивками. Микшеров куча! Электронные триммера, дисплей и все такое. Лучше брать ее. Менять не будете долго. Лет на 5 хватит или еще дольше. Обзор смотрите в статье Аппаратура Turnigy 9X.
Про более крутую аппу – смотрите в статье выше про выбор. Если бы я начинал только сейчас, я бы выбрал Турнигу.
Покупать все лучше с китая. Напрямую на хоббисти (требуется карточка Visa или Mastercard, не ниже classic) или через Паркфлаер. Это дешевле в 2-4 раза, чем брать в местных хобби магазинах, владельцы которых пользуются девизом – “раз хобби, значит должно быть дорого!”, а сами, фактически, перепродают тот же товар с китая.
Полеты
Перед тем, как взлетать – полетайте в пилотажных симуляторах. Вполне хватит научиться взлетать, делать круг и садиться в бесплатном FMS, дополнительные авиамодели для него можно взять тут.
Летать надо с передатчика, что бы привыкнуть к нему. Полеты на клавиатуре или джойстике ничего не дадут! Можно полетать на геймпаде, пока идет заказанная аппаратура. Про все это читайте статью Полеты в симулторах.
Разделы сайта
Краткий обзор разделов RC-Aviation.
Кроме того, что есть в статьях вы начнете обрастать дополнительными причиндалами, лучше сразу посмотреть раздел Оборудование для моделизма и решить, что вам надо.
В фотоинструкциях по изготовлению самодельных авиамоделей-пенолетов есть ссылки на статьи из раздела Технологии авиамоделизма, лучше просмотреть их заранее, там много ответов на вопросы которые возникают у новичка. Каждая статья фактически является пошаговой инструкцией.
Книги по авиамоделизму собраны здесь, я там старался собрать только то, что действительно будет полезным.
В разделе Чертежи авиамоделей выкладываются ссылки на чертежи. Там разбито по категориям. Для начала рекомендую сделать пару авиамоделей по фотоинструкциям, потом уже перейти к самостоятельному изготовлению того, что нравиться. Иначе есть риск сделать слаболетающую модель самолета и огорчаться от того, что она больше падает, чем летает.
В видеоинструкциях есть обзор изготовления 3-х авиамоделей. Рекомендую посмотреть, много интересных технических приемов, как первые авиамодели делать не рекомендую – получаются тяжелыми, в ветер летают с трудом. Многие жаловались, что сделали по ним, у них не полетело – падало. Потом сделали Цессну и поняли – авиамоделизм действительно вещь! И самодельные авиамодели – летают!! 🙂
Данная статья будет доплняться, но пока все. Удачных полетов в небе!!!
Константин, Радиоуправляемые авиамодели
Уроки управления радиоуправляемой модели самолета для начинающих
На чем учиться?
Прежде всего, посмотрите на свою радиоуправляемую модель самолета. Без сомнения он отвечает вашим эстетическим требованиям. Но подходит ли он для первоначального обучения или открытия сезона? В идеальном случае это должен быть аппарат с двухтактным двигателем рабочим объемом до 6,5 см3 1,5 мм (бальза 1,5 мм). Крыло – без сужения, с выраженным поперечным углом “V” и с профилем с плоской нижней поверхностью.
Удельная нагрузка на крыло не должна превышать 60 г/дм2. Желательно (но вовсе не обязательно), чтобы это был высокоплан, имеющий трехстоечное шасси. Если вы собираетесь эксплуатировать модель с травяного покрытия, установите колеса несколько большего диаметра, чем принято.
Если вы сторонник использования готовых моделей, учтите следующее. Особое место среди учебных аппаратов, изготавливаемых промышленным образом в виде наборов, занимают самолеты фирмы U.S. AirCore, выполненные из пластикового гофрокартона. В отличие от бальзовых, эти машины выдерживают практически любые удары, но имеют худшую аэродинамику, тяжелы, а главное – постоянно изменяют форму, что требует триммирования при каждом выезде на поле.
Регулировка
Уделите должное внимание регулировке (отметим, что многие фирменные модели заводской сборки имеют несоответствующую чертежам центровку даже в рекомендуемой комплектации). Чтобы проконтролировать центровку, поднимите самолет на уровень глаз или над головой, поддерживая его за нижнюю поверхность крыла в районе корневых нервюр. Теперь найдите точку, опираясь о которую, можно было бы удерживать модель в состоянии равновесия. Отметьте ее маркером или фломастером – это центр тяжести.
Измерьте расстояние от передней кромки крыла до центра тяжести, разделите его на средний размер длины хорды и умножьте на 100%. Так получится величина центровки модели, выраженная в процентах от САХ (средней аэродинамической хорды). Она должна находиться в пределах 20-30%. При более передней центровке может не хватить руля высоты для выравнивания при посадке. При более задней – модель будет недостаточно устойчива, а при центровке более 33% модель, как правило, неустойчива и опасна для полетов.
Кстати говоря, рекомендуемый диапазон летных центровок в 20-30% полезно заранее разметить на нижней поверхности крыла с помощью полоски цветного скотча (длина полоски должна быть равна диапазону в 10% хорды). При модернизации и ремонте модели следите, чтобы центр тяжести не вышел за допустимые пределы. Перед первым полетом модели еще проверьте центровку с полностью заправленным баком.
Отрегулируйте расход рулей в точном соответствии с чертежами или инструкцией. Обычно, указанные в описании расходы кажутся слишком малыми, но для тренировочных полетов этого достаточно, а большие могут сделать модель слишком “верткой”.
Первый выход на летное поле
Посчастливилось найти опытного моделиста, который на приемлемых условиях займется вашим обучением -отлично. Если нет, то не останется ничего другого, как собрать полетный ящик и следовать нашим дальнейшим инструкциям.
Приехав на поле в первый раз, прежде всего, проверьте дальность действия аппаратуры. С убранной антенной передатчика медленно отходите от модели, работая ручками. Когда рули начнут беспорядочно дергаться, остановитесь и измерьте расстояние. Оно должно быть не меньше 25 м.
Обкатав двигатель на земле, дозаправьте бак, дайте двигателю немного остыть и вновь запустите его. Поднимите нос модели вверх под углом 30°-45°. Если двигатель начинает терять обороты, значит, смесь бедная и необходимо открыть иглу большого газа на 1/8 оборота. Повторите эту проверку и добейтесь устойчивой работы двигателя, иначе модель может свалиться на крыло сразу после отрыва от земли.
Перед взлетом
Проверьте правильность направления движения рулей, уделив особое внимание элеронам (отклонение правого элерон вниз дает левый крен). Повторяйте эту операцию перед каждым взлетом, так как бывает, что после смены модели переключатели реверса на передатчике остаются в неправильном положении. Если ваш передатчик имеет переключатели расходов рулей, проверьте правильность их положения, поскольку тумблеры очень легко задеть, беря, передатчик дрожащей рукой.
Оцените направление ветра по лавсановой ленточке, которую стоит привязать на антенну.
Сориентируйте модель против ветра. Если модель будет взлетать с грунта, в этом направлении разбега должна быть ровная грунтовая дорога или низкий травяной покров. Зажав хвостовую часть фюзеляжа модели между ногами, проверьте приемистость двигателя. Посмотрите, нет ли в направлении взлета людей. Имейте в виду, что при разбеге возможны неконтролируемые развороты.
Теперь – взлетать.
Но… продуман ли заранее план полета? Не обольщайтесь на тот счет, что удастся точно ему следовать, но в любом случае составить его просто необходимо. Это может быть несложный полет по кругу, либо полет по базе с разворотами на 180°. И для начала ничего больше! Почти все аварии у новичков происходит из-за того, что, впав в эйфорию после первого удачного разворота, начинающий пилот вдруг решает выполнить бочку или обратную петлю, не имея ни малейшего представления о динамике модели.
Взлет
Установив малые обороты двигателя, отпустите модель и плавно прибавьте газ до большого. Второй вариант: помощник держит самолет за кончик киля на максимальном газу, и по вашей команде отпускает его без толчка вперед. Имейте в виду, что все самолеты, а в особенности с двухстоечным шасси, имеют тенденцию к развороту влево вследствие реакции винта. Поэтому будьте готовы компенсировать разворот отклонением руля направления.
Из-за малых моментов инерции модели это сложнее чем кажется, поэтому руль луче отклонить до начала движения, а потом уточнить угол отклонения, действуя быстро. В целом, задача удержать модель на узкой грунтовой или бетонной дорожке походит на балансирование канатоходца, поэтому не расстраивайтесь, если первые пять-десять раз модель уедет в траву (именно поэтому многие предпочитают взлет с рук или с бетонки немереной ширины).
Модель с двухстоечным шасси имеет также тенденцию к капотированию на разбеге. Поэтому, если вы видите, что модель разбегается с хвостом, поднятым выше горизонтального положения, дайте немного руль на себя. Модель нужно разогнать по земле до скорости, несколько превосходящей скорость отрыва.
Если по какой либо причине этого сделать не удалось, а дистанция для разбега почти исчерпана (приближается кромка высокой травы), сбросьте газ и не пытайтесь преждевременно оторвать модель от земли.
Для взлета дайте руль высоты на себя настолько. Резких движений ручкой не делайте – угол отклонения руля должен быть достаточным лишь для набора высоты под небольшим углом. Одновременно будьте готовы скомпенсировать крен элеронами. Крен после отрыва возникает практически всегда и может быть вызван моментом винта, турбулентными вихрями у земли или перекосом крыла.
Если модель раскачивается по крену и плохо реагирует на элероны – это верный признак того, что взлет произведен рано. Тогда единственный выход – не задирать модель вверх и отчаянно бороться с кренами, пока самолет не наберет достаточную скорость, и только после этого начать нормальный набор высоты. Никогда не взлетайте по крутой траектории, как бы хорошо вы не пилотировали. Дело в том, что в случае отказа двигателя не останется ни малейшей возможности перевести модель на планирование, и неизбежно произойдет сваливание на крыло с одновременной потерей эффективности рулей.
Кроме того, каждый самолет имеет свой оптимальный угол набора высоты, при котором достигается максимальная скороподъемность. При превышении этого угла скорость начинает падать, а при более крутом “задирании” модели возможно сваливание.
В случае отказа двигателя на взлете сразу же отдайте ручку управления от себя так чтобы перевести модель на планирование и приготовьтесь к посадке без изменения направления полета.
Полет на высоте
Набрав примерно 50 метров высоты, сделайте левый разворот на 90°. Для этого элеронами введите модель в крен (примерно 45°) и возьмите руль высоты на себя. Модель войдет в вираж. Контролируйте крен элеронами, не давая ему увеличиваться. После разворота верните руль высоты в нейтральное положение и устраните крен. Теперь закройте дроссельную заслонку двигателя наполовину, – этого должно быть достаточно для горизонтального полета. Повернитесь так, чтобы солнце было у вас за спиной и, выполнив, если необходимо, еще один разворот, выведите модель в зону перед собой. Теперь летайте по базе слева направо, выполняя левые развороты на 180°.
Наступило самое время оценить
свое психологическое состояние. Большинство начинающих испытывают сильное волнение сразу после запуска мотора, остальные – после взлета, когда осознают, что… модель ведет себя совсем не так как представлялось. Страх, вызывающий рефлекторное замедление реакции, становится одной из причин аварий. Поэтому, набрав высоту, попытайтесь расслабиться, продолжая, тем не менее, управлять полетом по базе.
Очевидно, вскоре вы заметите, что модель постоянно крениться в ту или иную сторону или набирает высоту сама по себе. Попросите помощника переместить ручку триммера на несколько щелчков в нужную сторону.
Если помочь некому, делайте это левой рукой, предварительно выровняв модель в горизонтальный полет. После окончания триммирования по высоте и элеронам, вы сразу почувствуете некоторое облегчение, так как модель не будет больше летать “на ручке”.
Во время первых полетов не опускайте самолет ниже 100 м, и не удаляйте его от себя слишком далеко, модель должна быть хорошо видима. В случае потери ориентировки немного отклоните элероны влево (или вправо), и по реакции модели оцените, летит ли к вам или от вас. При управлении особую трудность представляет обратный эффект управления элеронами, когда модель летит на вас.
Здесь поможет такой прием: повернитесь к модели правым плечом и представляйте, что движетесь как бы вместе с моделью.
Альтернативным упражнением для первоначального обучения является полет по кругу вокруг пилота. Однако в этом случае самолет неизбежно будет периодически пролетать с солнечной стороны. Также труднее будет триммировать модель, так как из траектории полета исчезнут прямолинейные участки.
Освоив левые развороты на 180°, отработайте правые. Имейте в виду, что модель отрегулирована на режим 50% мощности двигателя, и при увеличении тяги будет возникать тенденция к набору высоты, а на малом газу – к пологому снижению. Отрабатывайте горизонтальный полет до тех пор, пока не будете чувствовать себя уверенно и непринужденно. Только после этого приступайте к выполнению более сложных фигур.
Посадка
Не дожидаясь, пока кончиться все топливо, приступайте к посадке. Классическим в большой авиации считается заход ” по коробочке”. Но для начала можно поступить проще. Выполните пролет по ветру со снижением. Через 200-300 м разверните модель на 180° и сбросьте газ. Выдерживайте угол планирования, при котором скорость остается неизменной. Модель теперь должна лететь против ветра.
Следующий этап посадки – выравнивание – самый сложный. Нужно точно определить высоту выравнивания, чтобы модель перешла в горизонтальный полет на высоте около 1 м. Боязнь опоздать с выравниванием обычно приводит к высокому выравниванию на высоте 2-3 м.
Пилот “подвешивает” модель, результатом чего становиться парашютирование с грубым приземлением, либо сваливание и удар носовой частью фюзеляжа. Если же самолет долго сохраняет скорость, набранную на планировании, то высокое выравнивание не опасно – достаточно лишь слегка отдать ручку от себя. Модель опять перейдет на планирование.
Заключительный горизонтальный полет с постепенной потерей скорости называется “выдерживание”. Задача его – погасить скорость модели до посадочной.
Если покрытие полосы хорошее, то первые посадки лучше делать с небольшим избытком скорости. Для этого как бы притирайте рулями модель к земле после выравнивания.
Посадка на самолете с двухстоечным шасси сложнее по сравнению стрехстоечным и, одновременно, интереснее. Если посадка выполняется на траву, модель нужно выдерживать на минимальной высоте дольше. После заметного увеличения угла атаки, она начнет парашютировать и в этот момент коснется земли, выполнив “трехточечную” посадку. Если вертикальная и горизонтальная скорости великоваты, модель начнет “козлить” (удар колесами о землю увеличивает угол атаки крыла настолько, что модель опять отрывается от земли).
При повторном снижении модели надо дать руль на себя, чтобы смягчить очередной удар, иначе подскок повторится. Грубые посадки часто приводят к капотированию – опрокидыванию модели через нос; но это редко сопровождается поломками. Если трава высокая, есть шанс скапотировать даже после идеальной посадки, так что особенно не расстраивайтесь по этому поводу. Для уменьшения тенденции к капотированию можно сместить стойки шасси вперед или сделать центровку более задней.
Идеальная посадка с трехстоечным шасси характерна тем, что полосы сначала касаются основные стойки, после чего модель сама опустит переднюю ногу.
Всегда нужно стремиться к тому, чтобы точка приземления модели находилась в пределах хорошей видимости. Но не заходите на посадку строго “на себя”. Траектория движения модели должна пройти от вас не ближе 5 м. Если вы ошиблись с расчетом на посадку, лучше приземлить самолет на большом удалении, не делая разворотов на планировании.
Варианты для более “продвинутых” пилотов: плавно дайте полный газ и уйдите на второй круг или сделайте разворот на планировании. Последний нужно делать с запасом скорости и высоты, так как скорость сваливания модели увеличивается пропорционально углу крена. При этом постоянно помните, что после всех разворотов необходимо сесть против ветра. Если ветер слабый, то, в крайнем случае, можно сесть и по ветру, но ни в коем случае не с боковым.
Полезное упражнение – выполнить заход на посадку и снижение с последующим уходом на второй круг. Так за несколько полетов удастся имитировать десятки посадок, не изнашивая самолет лишними нагрузками. Эффектно смотрится “конвейер” – посадка и последующий взлет без полной остановки модели.
Пилотаж в горизонтальной плоскости
Фигура, часто присутствующие в программе соревнований “свободного класса” – это разворот на 90° и 270°. Сделав разворот на 90°, сразу же переложите крен на другую сторону и развернитесь на 270°. При этом стремитесь к тому, чтобы модель возвращалась к вам по той же прямой, по которой она двигалась до ввода в фигуру.
Вираж, или несколько виражей на 360° – очень характерные фигуры для копий маневренных истребителей.
Трудность заключается в том, чтобы радиус виража и крен были постоянными. При выполнении нескольких виражей легко непреднамеренно набрать или потерять высоту. Делая горизонтальную восьмерку, следите за тем, чтобы виражи имели одинаковый и не слишком маленький радиус. Все эти фигуры лучше выполнять с небольшой скоростью.
Петля Нестерова
Разгоните модель на полном газу и дайте ручку на себя. Сделайте восходящую часть петли, по возможности большего радиуса. В верхней точке сбросьте газ до малого и завершите петлю с тем же радиусом. На выходе не забудьте вернуть ручку газа в нужное положение.
Бочка
Сразу заметим, что на учебном самолете тяжело сделать красивую бочку. Набрав высоту на максимальной скорости, слегка задерите нос модели и почти одновременно полностью дайте элероны в нужную сторону. Когда самолет перевернется на спину, немного дайте руль высоты от себя, выравнивая фюзеляж в горизонтальное положение. Закончите бочку. При выполнении этой фигуры модель стремиться уйти вниз, – нужна высота и готовность парировать тенденцию к пикированию.
Обратная петля
Сразу предупреждаем: лучше не делайте ее на модели с несущим, явно несимметричным профилем крыла. Выполнив нисходящую полупетлю, учебная машина с таким крылом не всегда может “выкарабкаться” наверх. В результате – полет на спине, да еще и с большой потерей высоты. Здесь поможет только резкий возврат с помощью элеронов в нормальный полет. Для моделей же с симметричным профилем обратная петля почти не отличается от прямой.
Иммельман
Набрав скорость, сделайте полупетлю и переверните модель элеронами в нормальный полет. Кстати – это удобный способ сменить направление полета на обратное.
Штопор
Очень интересная и зрелищная фигура. Наберите 150-300 м высоты и сбросьте газ до малого. Выполняйте выдерживание модели, как при посадке, до начала парашютирования. В этот момент полностью дайте рули высоты на себя и направления в желаемую сторону, и затем удерживайте их полностью отклоненными. Модель
должна войти в штопор, вращаясь вокруг одного из концов крыла.
Если при выдерживании самолет самопроизвольно начинает “валиться” в крен с потерей эффективности элеронов, добавьте руль направления в ту же сторону, одновременно взяв руль высоты на себя.
Для выхода из штопора верните ручки в нейтральное положение. Все фирменные и грамотно спроектированные самодельные модели при этом выходят из штопора. Не штопорите слишком низко – как для самого штопора, так и для выхода из него требуются значительные запасы высоты.
Модели с передней центровкой не удается ввести в штопор, – вместо него получается спираль.
Плохо штопорящая модель, сделав несколько витков, разгоняется и также переходит в спираль. Чтобы ваш самолет хорошо штопорил, сделайте центровку более задней. Если и это не помогает, постепенно подрезайте киль, уменьшая его площадь. Иногда, срезав всего 6-7 мм, можно получить желаемый результат. Если самолет штопорит уверенно, то можно сменить направление штопора перекладкой руля направления.
(Автор: Я.Галустов. источник жкрнал Моделизм спорт и хобби)
Программно-аппаратная модель
Функциональная схема автопилота представлена на рис.1. Сердцем автопилота является блок LEVEL1. Этот модуль является высокоприоритетной функцией и выполняется независимо от других событий каждые (15.625 мс испытанный вариант) 46.875 мс. Его задача — удержание самолета в правильном полетном положении
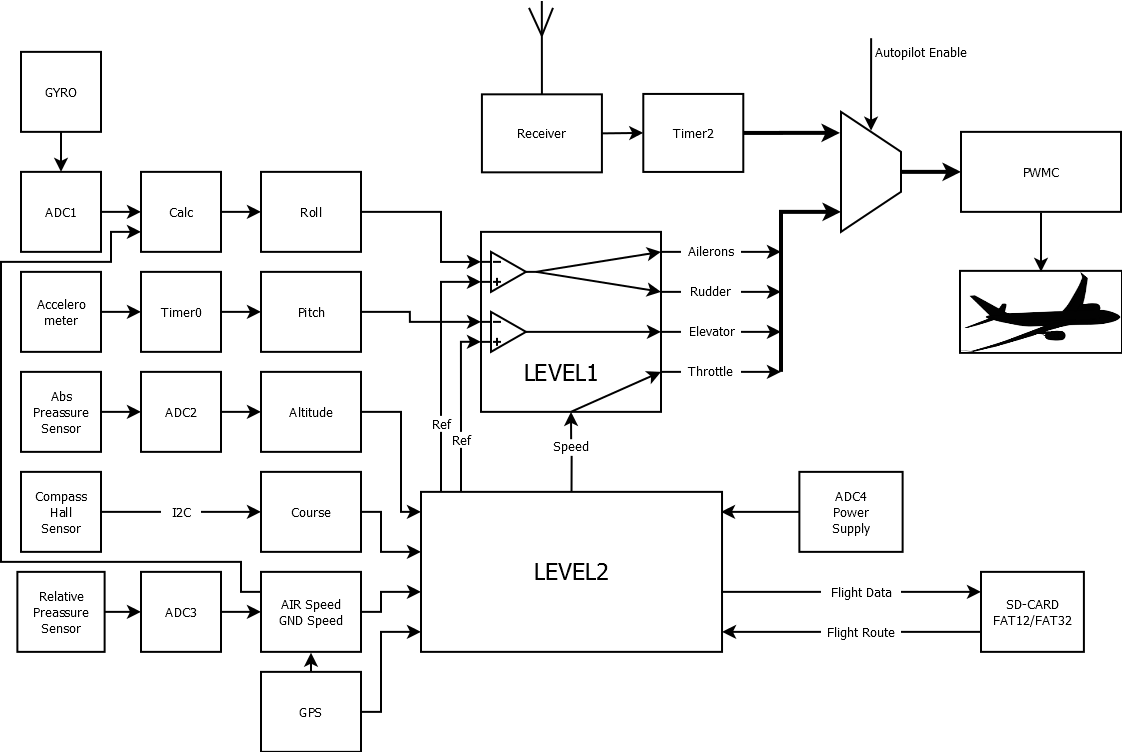
Рис. 1Входными данными для модуля является структура FSSi, которая содержит параметры крен (Roll), тангаж (Pitch) и воздушную скорость (Air Speed). Правильным положением считается при отсутствии сигналов Ref крен = 0 и тангаж = 0. Также этот модуль управляет контроллером двигателя самолета и обеспечивает удержание скорости, полученной от блока LEVEL2 в соответствие с полетным заданием.
Модуль Level2 вносит возмущение в модуль LEVEL1 и таким образом заставляет его удерживать уже не нулевые значения крена и тангажа, а рассчитанные в соответствие с полетным заданием. Параметр скорости непосредственно передается из полетного задания. Выходом модуля является структура данных, которая содержит текущее положение элеронов(ailerons), руля высоты(elevator), руля направления или рысканья(rudder)
и РУД (Ручка управления двигателем, Throttle). Эта структура в программе названа FSSo, Модуль имеет имя FltStSys (flight stabilization system). Она может быть подана в PWMC (Pulse Wide Modulation Controller) если активирован режим автопилота. В противном случае на PWMC подается структура, заполненная таймером в соответствие с измеренными значениями, полученными от приемника ВЧ.
Это режим управления традиционный для радиоуправляемых моделей.Модуль Level2 работает медленнее, 1 раз в секунду он формирует управляющие воздействия — смещает нулевые точки — для модуля Level1. Данные, передаваемые в Level1, помечены словом keep в программе. Т.е. это то, что должен удерживать модуль Level1.
Этот модуль выполняет все остальные функции:1) реализация взлетного режима.2) Удержание высоты3) Удержание курса4) Расчет маршрута и проведение самолета по маршруту, заданному на SD карточке.5) Запись полетных параметров на SD карту один раз в секунду.
(Функция черного ящика)6) При подключенном к одному из COM портов модуля bluetooth выдача телеметрической информации.Основная идея построения LEVEL1 автопилота заключается в построении полностью инерциальной системы пилотирования самолета, не использующей внешние сигналы, такие как фотодатчики цветовой температуры неба и земли или например NAVSTAR или ГЛОНАСС для удержания самолета в нормальном полетном положении.
- Roll. Значение крена вычисляется по значению угловой скорости разворота самолета и его линейной скорости в предположении, что разворот происходит без скольжения. Аналоговый сигнал от датчика угловой скорости GYRO оцифровывается встроенным в контроллер АЦП(ADC1) и далее модуль Calc вычисляет крен.
- Pitch. Значение тангажа (pitch) контроллер получает путем измерения таймером длительности импульса от датчика-акселерометра. Это позволительно делать, поскольку как правило слишком быстрого изменения скорости (кроме взлетного режима) у самолетов обычно не бывает.
- Altitude. Для измерения высоты используется датчик абсолютного давления. Данные получаем в виде напряжения, которое оцифровывается одним из каналов АЦП(ADC2) контроллера.
- Course. Для получения значения курса используется либо GPS модуль, либо, при его недоступности или при нулевой скорости (перед стартом контроль курса), цифровой компас Honeywell c датчиками Холла. Подключение к контроллеру по интерфейсу I2C.
- Speed. Датчик воздушной скорости на трубке Пито. Используется датчик относительного давления. Напряжение с датчика измеряется одним из каналов АЦП(ADC3) контроллера. Также для некоторых вещей используется значение скорости с модуля GPS.
- GPS. Модуль GPS подключен через com порт. Служит для получения маршрутных данных и скорости относительно земли (GND speed).
- SD card. Не является датчиком, однако с нее считываются данные о настройках модулей (коэффициенты для формул), данные о маршруте. На нее записываются полетные данные раз в секунду.
2 Гироскоп
Ключевым элементом панели любого самолета является прибор авиагоризонт. Он обычно строится на базе механического гироскопа. Он показывает крен и тангаж самолета в режиме полета по приборам. В данном проекте используется полупроводниковый гироскоп MEV-50A для измерения крена самолета.
Однако, в отличие от классического гироскопа полупроводниковые гироскопы измеряют не абсолютный крен, а его производную — угловую скорость. Именно это является главной причиной, почему нельзя использовать полупроводниковый гироскоп для измерения крена самолета.
Дрейф подобной системы измерения ничем не определен при небольших угловых скоростях. Если, например, в шлеме VR (виртуальной реальности), в котором гироскоп выполнен не на основе магнитного компаса с датчиками Холла, а на полупроводниковом приборе, попробуете очень медленно поворачивать голову, вы обнаружите, что он “не замечает” поворота головы.
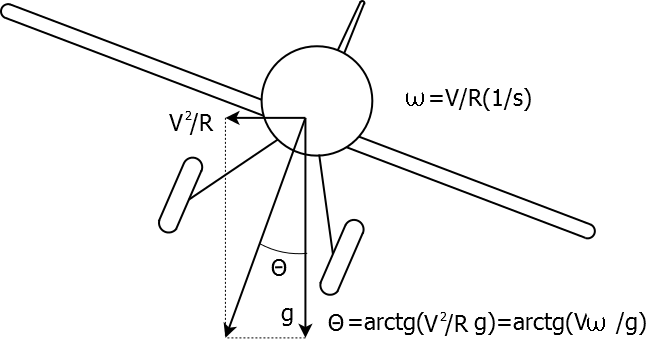
Здесь R — радиус разворота самолета, g — ускорение свободного падения (9.8 м/с2), V -скорость относительно земли (истинная воздушная скорость), ω — угловая скорость, рад/с. Истинную скорость выдает GPS, или ее необходимо вычислять исходя из курса, скорости и направления ветра.
В данном проекте используется скорость по GPS. Для исключения умножения на 0, минимальная скорость для расчета ограничена снизу 10 км/ч. К гироскопу, установленному таким образом, предъявляются очень серьезные требования по точности измерения. Так, первый гироскоп, который был опробован привел к потере самолета.
Видеозапись полета можно посмотреть тут, данные “черного ящика” также доступны. Самолет бы поднят с пульта на высоту около 150м и был включен автопилот. Однако, как видно из графиков, с самого начала гироскоп давал неверные данные — Gyr на картинке — и, как только на 97 секунде полета был включен автопилот, самолет ожидаемо вошел в штопор.
К сожалению, вывести его благополучно не удалось из-за ошибки эргономики: ручное управление включалось с пульта при среднем положении тумблера, которое вовремя от волнения найти не удалось:). Это был гироскоп от простого соосного вертолетика. Вообще, мне было понятно с самого начала, что так и будет, поскольку температурные испытания в холодильнике показали огромный дрейф этого прибора.
Уход за 15 минут составил около 15гр./c, хотя нормальные рабочие значения этого параметра обычно не превышают нескольких градусов в секунду во всем диапазоне кренов (до 30 гр.). А точность должна быть не хуже 0.1o/c.Посмотреть на данные тестирования и на процесс измерения можно здесь.
Сравнение характеристик гироскопов представлено на рис.5 Можно видеть, что в общем и нельзя было ожидать от noname гироскопа нормального полета, если его дрейф за 15 мин. в морозильной камере составил примерно 24 °/с. Сейчас используется гироскоп MEV-50A. Видно, что его дрейф за 25 минут порядка 0.6 °/с.

Рис.5
5 Цифровой компас
Цифровой компас позволяет определять направление полета при отсутствии сигнала или приемника GPS. Изначально система строилась как инерциальная. Программа полета записывалась не в виде координат GPS, а задавалось направление, скорость и время полета до следующей точки.
В качестве компаса был применен 2-х осевой компас HMC6352. Если бы тогда разработчик был умнее он бы применил конечно 3-х осевой компас. Но сделано пока так. Компас имеет интерфейс I2C. Этот прибор может выдавать непосредственно курс, либо уровни составляющих магнитного поля.
Для увеличения точности необходимо иногда, или при изменении внешней магнитной обстановки производить его калибровку. Для калибровки необходимо при включении питания автопилота удерживать кнопку калибровки, поле чего контроллер на 1 минуту входит в режим калибровки.
Режим калибровки индицируется особым миганием индикатора режима работы (J9, BLUE-LED, 4 раза в секунду). В это время необходимо в строго горизонтальном положении самолета произвести несколько полных разворотов самолета. Для того чтобы можно было пользоваться датчиком, для корпуса автопилота нельзя применять магнитные материалы.
К сожалению, первые же эксперименты показали, что точность измерения хороша только в случае строго горизонтального положения прибора. На самолете это требование выполнить невозможно. Причем точность не просто падает, а ее нет вообще. При наклоне даже на небольшой угол, несколько градусов получаем на выходе все -180°.
Поэтому пришлось отказаться от получения непосредственно курса от компаса, а получать значения компонентов магнитного поля, и вычислять курс применяя насколько это возможно компенсацию. За неимением третьей оси Z пришлось принять значение этой компоненты константой.
Результат работы компаса с компенсацией и без показан на рис.9. HDGn — некомпенсированный компас, HDGc — компенсированный. Как видно из графиков, компенсация значительно улучшает качество измерений курса, однако о точности в десятые доли градуса речи конечно не идет.
Также работу компаса можно увидеть на полетных данных без GPS 11.09.2023. Здесь полет совершался в Вохоново. Нужно заметить, что в полетах в 2009 г. еще не было компенсации компаса. Как видно на рисунке старт действительно происходит с курсом близким к 120 градусам, и завершается в лесу с курсом около 300 градусов.

Рис. 9.
6 Модуль GPS
Применен GPS модуль с встроенной антенной. Это небольшая платка, располагающаяся снаружи экранированной коробки автопилота. (См. Рис.8). Документацию на модуль можно найти в папке GPS. Применен модуль S3126. GPS модуль подключен к контроллеру через один из UART.
Общение с модулем идет стандартным протоколом NMEA0183. На испытании 2023_09_02 перед запуском самолета GPS сработал некорректно, и самолет очень красиво полетел не туда. Как можно было видеть из данных “черного ящика” TRACK005.LOG GPS “думал” что он в километре от заданной точки.
Это можно посмотреть в полетных данных от 2023_09_02. Надо заметить, что в этом испытании я еще не мог контролировать расстояние до следующей полетной точки, пока был включен пульт (т.е. выключен автопилот). Поэтому расстояние 134 М в лог файле не говорило о том, что место самолета определено корректно.
Расстояние до следующей точки должно было быть около 100 м, смещение около 0, а курс 323. Однако, как видно реальные данные появились только в момент взлета в 14:10:33. И курс оказался 150, расстояние 1012М, смещение 121М (отклонение от оси, по которой должен лететь самолет в соответствие с заданием).
После этого испытания в программу было внесено изменение, чтобы маршрутные данные отображались в телеметрии независимо от режима. Стало возможным видеть перед запуском, корректно ли работает GPS. Этот контроль также отражен в карте запуска.
Автопилот получает от GPS модуля следующие параметры: время, дату (используется при записи лог файла), готовность, количество видимых спутников, координаты долготу, широту и скорость в узлах(knots). Готовность GPS отображается светодиодом зеленого свечения, мигающего в моменты записи информации на карту, примерно 1 раз в секунду.
Важно понимать, что GPS модуль не может так же точно, как координаты определять высоту, поэтому высота не используется. При включении автопилота, сразу после прогрева и калибровки датчиков, контроллер производит расчет маршрута по координатам полетного задания.
Этот маршрут не записывается на карту, но выводится через BT телеметрию. По этим данным можно оценить правильность полетных данных. Программа сейчас не ждет инициализации GPS, однако это легко изменить. Вот так выглядит выдаваемый лог телеметрии:GPILOT V2.17.
0 24/Jul/2023Waiting GPS…GPS ready…Init from MMC card..Hidden sectors = 57G0,60.674983,29.173461,0,0,0,0,1G1,60.675504,29.172667,30M,50kM/h,323D,5s,2,72MG2,60.676388,29.171305,30M,50kM/h,322D,8s,3,123MG3,60.675641,29.168697,30M,50kM/h,239D,11s,4,164MG4,60.672877,29.
172249,30M,50kM/h,147D,26s,5,362MG5,60.673546,29.174448,30M,50kM/h,58D,10s,6,140MG6,60.674767,29.173783,20M,30kM/h,345D,16s,7,140MG7,60.675737,29.172313,20M,0kM/h,323D,0s,0,134MCompass calibrate skip…Sensors calibrate…Sensors calibrate complete…
Выбор аппаратуры управления
Аппаратура управления для радиомоделей выпускается несколькими крупными фирмами: Hitec, Futaba, JR, Spectrum.
И несколькими китайсиким фирмами, такими как wfly, но мое имхо — лучше брать аппаратуру более-менее известной фирмы. Хотя wfly тоже прекрасно работает, в принципе.
Аппаратура управляения классифицируется по частоте (основные — 35 МГц, 40 МГц и 2.4 ГГц) и по количеству каналов (3,4,6,7,9,10 и т.д.)
FM-частоты 35 МГц и 40 МГц — это классика, на них летают уже не один десяток лет. 2.4 ГГц — относительно новая разработка, но уже приобрела огромную популярность среди моделистов. Основное отличие Fm частот от 2.4ггц в том, что при полете на FM частоте всегда необходимо знать какой у тебя канал (у меня например 51 канал, 40.675 МГц) и следить за тем, чтобы твоя частота ни с кем не пересекалась на летном поле — иначе получите два комплекта «дров» при одновременном полете на одинаковой частоте. У 2.
4ГГц таких проблем нет — там технология позволяет поднимать в воздух огромное количество самолетов без пересечений частоты. Минус же 2.4 ггц в относительной дороговизне оборудования, особенно приемников, которые часто страдают от вибраций или при падениях самолета.
Количество каналов — тут чем больше тем лучше. Минимум необходимо 4 канала:
— руль высоты
— руль направления
— газ
— элероны
Бывают модели без элеронов или руля направления, но учиться лучше начинать на моделях с полноценным управлением чтобы сразу приобретать все необходимые навыки.
Новичкам лучше брать аппаратуру сразу с 6 каналами, потому что из 4 каналов можно быстро вырасти — после первой модельки обязательно захочется что нибудь посерьезнее, например с закрылками и убирающимся шасси — надо еще 2 канала. Из 6 же каналов можно довольно долго не вырастать.
Я для себя остановился на бюджетном варианте Hitec Optic 6 — аппаратура 6 канальная, 40Мгц, имеет возможности тонкой настройки.
Флагманские системы радиоуправления
Системы, о которых мы коротко расскажем в этой категории находятся на самом острие прогресса в сфере RC моделизма и обладают максимальными функциональными возможностями. Мы не будем выделять несколько преимуществ и особенностей – их слишком много, чтобы поместить их в формат краткой обзорной статьи. Рекомендуем ознакомиться с полными описаниями приведённых ниже систем радиоуправления!
Флагман линейки авиамодельных систем радиоуправления японской корпорации Futaba. Первая в истории бренда 18-канальная система управления. Высокочастотный модуль работает в режимах FASST, FASSTest (с телеметрией) и S-FHSS. Передатчик использует специально разработанную операционную систему и оснащён большим цветным сенсорным дисплеем.
Высокие характеристики и возможности системы 18MZ подтверждены спортсменами высочайшего уровня – эту аппаратуры используют такие пилоты, как 8-кратный Чемпион Мира в классе FAI F3A Кристоф Пьезан-Ле Ру (Cristophe Paysant-Le Roux, Франция) и наш соотечественник, трёхкратный победитель турнира Jet World Masters (Чемпион Мира в классе реактивных моделей-копий по версии IJMC), Виталий Робертус.
В 2023 году корпорация Futaba откликнулась на пожелания моделистов со всего мира, не знающих компромиссов при выборе аппаратуры радиоуправления, но при этом не готовых купить 18MZ из-за самой высокой на рынке цены. 18SZ по возможностям максимально приближается к флагману – различия в меньшем количестве микшеров, тумблеров и ручек и уменьшенном дисплее.
Меню доработано для ещё большей простоты в восприятии. Также добавлено мультикоптерное меню и новый протокол передачи данных (в дополнение к трём имеющимся) – T-FHSS, позволяющий использовать телеметрию на относительно недорогих приёмниках. Один передатчик для всех моделей, от самых простых до элитной спортивной техники – это очень удобно!
*Чтобы не уменьшать ресурс дорогой аппаратуры радиоуправления, тренируясь на симуляторе, Вы можете приобрести USB-контроллер, повторяющий эргономику и функции передатчика.

