

Автопилот
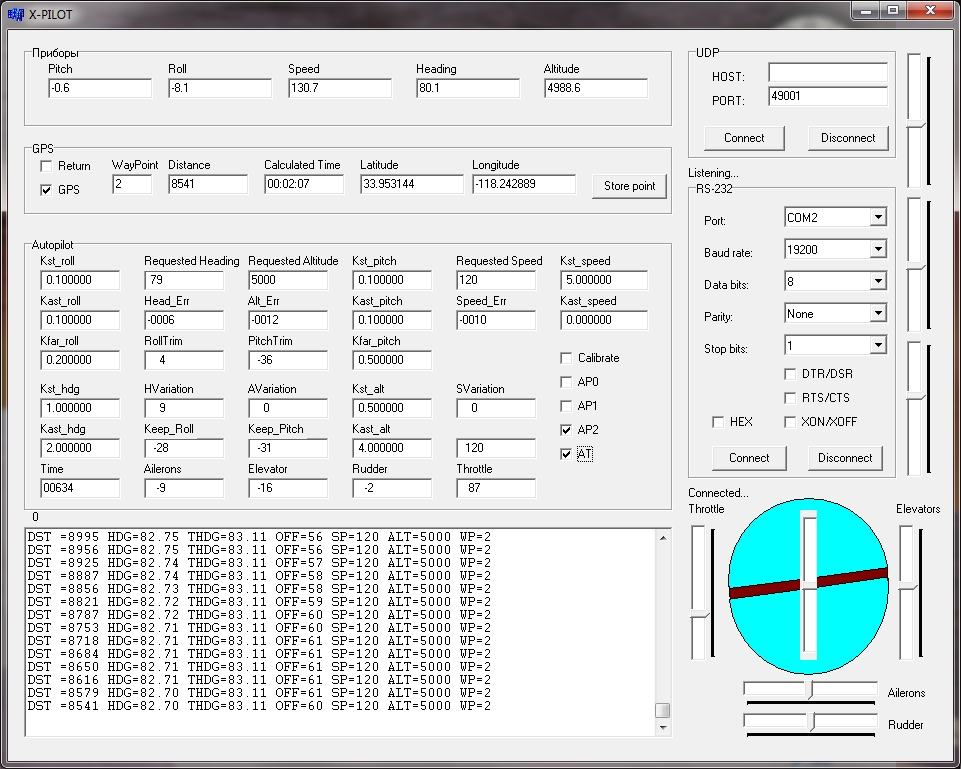
Программа автопилота написана в среде Borland C Builder 6. Поле “Приборы” (Рис.11) показывает исходные данные с датчиков, которые обновляются 20 раз в секунду. Здесь мы видим Pitch (Тангаж, градусы), который вычисляется по акселерометру в радиоуправляемом самолете, Roll (Крен, градусы), который вычисляется по продольно установленному гироскопу, измеряющему скорость разворота самолета.
при разгоне самолет сразу же приподнимает хвост. Это отличие от реальности. А вот крен действительно вычисляется по угловой скорости разворота самолета. Вычисленное значение крена и демонстрируется в виде условного авиагоризонта в правом нижнем углу программы. (Рис.2) Значение тангажа показывает слайдер в центре авиагоризонта.
Рис. 2
Checkbox GPS включает полет по маршруту, записанному в таблице. При этом поля Requested Heading, Requested Altitude и Requested Speed заполняются автоматически из структурыtypedef struct WPNT { int pid; int speed; int altitude; int heading; int latitude; int longitude; }WPNT;
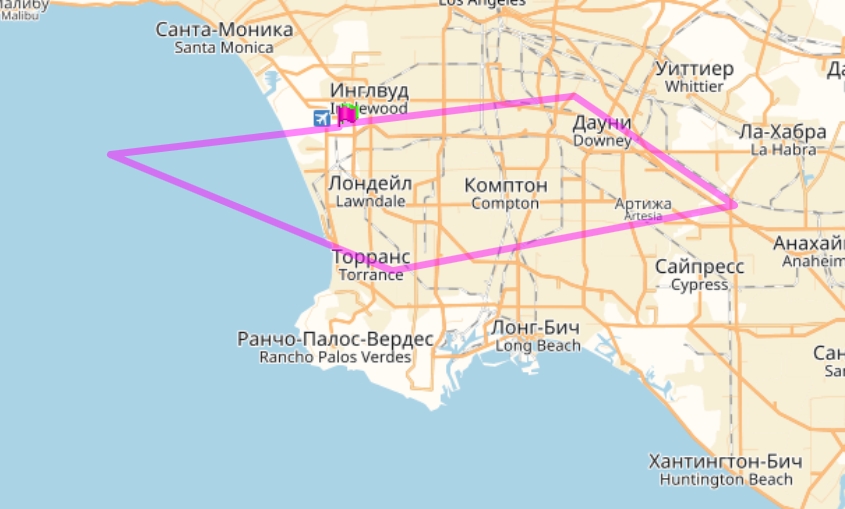
В демонстрации структура содержит пример маршрута около аэропорта Los Angeles. (Рис.3)Для изменения маршрута необходимо изменить структуру и перекомпилировать проект. Если GPS выключен, то эти поля можно заполнить вручную. Активация значения в поле происходит при двойном клике мышки. Checkbox Return позволяет вернуться к точке, запомненной при нажатии кнопки Store Point.
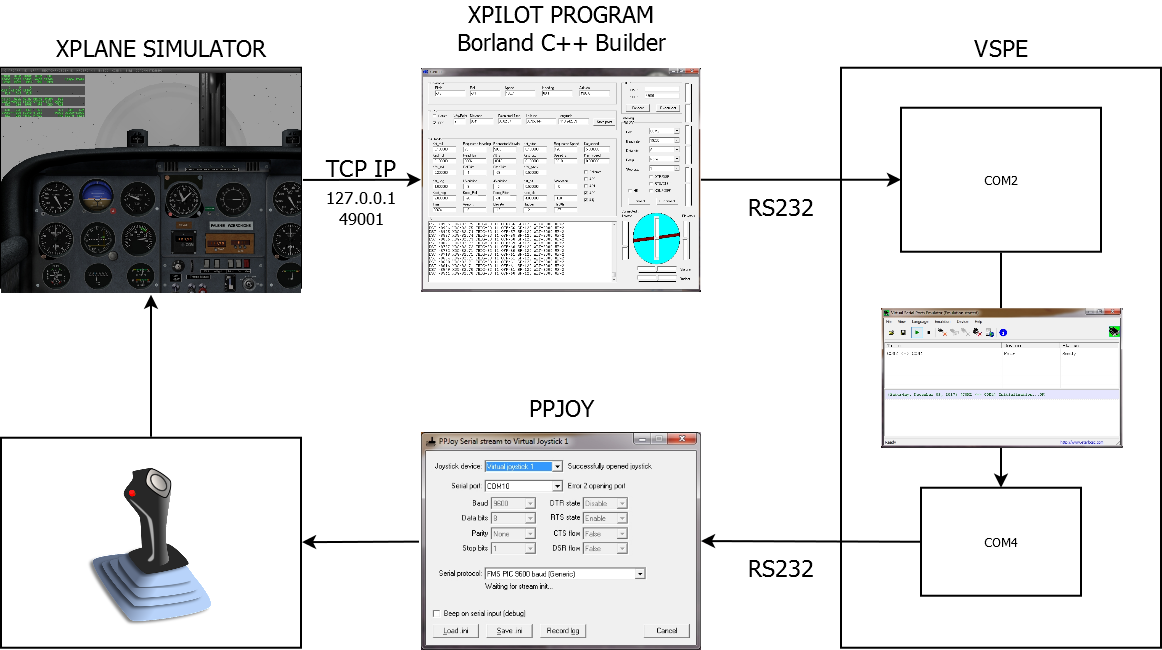
WayPoint — номер точки маршрута; Distance — дистанция до следующей маршрутной точки; Calculated Time — приблизительное время достижения следующей точки (приблизительно потому что не учитывается скорость ветра), и далее — координаты GPS широта-долгота. Справа вверху панель UDP сервера. Ниже нее панель управления портом RS232. Здесь следует менять только номер порта. Остальные параметры жестко определены взаимодействием с виртуальным джойстиком.
Легенда: RW — change allowed, RO — only for look, RWP- change allowed partiallyKst_roll (RW) — статический коэффициент усиления петли ОС (обратной связи) по кренуKast_roll (RW) -астатический коэффициент усиления петли ОС по кренуKfar_roll (RW) — коэффициент триммирования по кренуKst_hdg (RW) — статический коэффициент усиления по удержанию курсаKаst_hdg (RW) — астатический коэффициент усиления по удержанию курсаTime (RO) — время в полете, секунды.
Requested Heading(RWP) — запрошенный курс, градусы (Вручную или из таблицы если GPS вкл)Head_Err (RO) — Ошибка по курсу, градусыRollTrim (RO) — поправка триммирования по кренуHVariation (RO) — скорость изменения курса гардус/сек.Keep_Roll (RO) — удерживаемый крен, градусыAilerons (RO) — положение элеронов самолетаRequested Altitude (RWP) — запрошенная высота, футы (Вручную или из таблицы если GPS вкл)Alt_Err (RO) — Ошибка по высоте, футыPitchTrim (RO) — поправка триммирования по тангажуAVariation (RO) — скорость изменения высоты футов/сек.
Keep_Pitch (RO) — удерживаемый тангаж (градусы)Elevator (RO) — положение руля высоты самолетаKstpitch (RW) — статический коэффициент усиления петли ОС по тангажуKast pitch (RW) -астатический коэффициент усиления петли ОС по тангажуKfar_ pitch (RW) — коэффициент триммирования по тангажуKst_alt (RW) — статический коэффициент усиления по удержанию высотыKаst_alt (RW) — астатический коэффициент усиления по удержанию высотыRudder (RO) — положение руля направления самолетаRequested Speed (RWP) — запрошенная скорость, миль/час(knots) (Вручную или из таблицы (GPS вкл))Speed_Err (RO) — ошибка по скорости(knots)SVariation (RO) — скорость изменения скорости(knots)Keep_Throttle (RO) — удерживаемая скорость(knots)Throttle(RO) — положение РУДKst_speed (RW) — статический коэффициент усиления по удержанию скоростиKast_speed (RW)- астатический коэффициент усиления по удержанию скоростиCalibrate — ChechBox включения калибровки джойстикаAP0 — CheckBox режим 0 автопилота — удержание крена = 0 и тангажа = 0AP1- CheckBox режим 1 — удержание текущей высоты и текущего курсаAP2- CheckBox режим 2 — удержание курса и высоты по таблице (GPS вкл.) или по установленным значениям (GPS откл.)AT — CheckBox — автомата тяги
Около “авиагоризонта” есть слайдеры, с их помощью можно вручную управлять самолетом в случае отключения автопилота или автомата тяги. Справа с краю есть еще три слайдера, это составляющие управления рулем высоты: (выведены для отладки)
верхний — статическая составляющая TrackAltErrсредний — астатическая составляющая TrackVarErrсредний — составляющая триммирования TrackTrim
DST — дистанция до следующей точки в футах (C-B на рис. 13)HDG — курс непосредственно на следующую маршрутную точку (С-B на рис.13)THDG — курс, с которым следует подлететь к следующей точке (А-B на рис.13)OFF — смещение от требуемой траектории в футах (расстояние от точки С до линии AB Рис.13)SP — требуемая воздушная скорость полетаALT — требуемая высота полетаWP — следующая путевая точка
Виды радиоуправляемых квадрокоптеров в магазине HOBBYSTART
Для начинающих
Радиоуправляемые модели в этой категории объединяют следующие особенности:
- Доступная цена. Не каждый может или хочет тратить большие деньги, чтобы попробовать себя в RC-пилотировании.
- Умеренная манёвренность. Для начинающего оператора важнее устойчивость аппарата, нежели способность выполнять фигуры высшего пилотажа.
- Повышенная управляемость и прочность. Этим момента уделено особое внимание, потому что любой новичок совершает ошибки и попадает в аварии. Поэтому управлять такими аппаратами несложно, и они способны пережить небольшие столкновения и падения.
В нашем каталоге категория «Для начинающих» – это возможность по умеренной цене купить коптер в подарок, для ребёнка или себя (если не уверены, что сохранится страсть к пилотированию).
Гоночные
В эту группу мы собрали мощные и манёвренные модели, которые созданы, чтобы бросать вызовы себе и окружающим. Гонки на квадрокоптерах – серьёзный спорт. В мире проходит множество соревнований, а на самом престижном турнире World Dron Prix победителям раздают миллион долларов.
При сборке гоночных моделей используются детали и запчасти высшего качества, поэтому и цена на такой аппарат не может быть низкой. Тем не менее, и в этой категории есть свои премиумные и бюджетные бренды. И те и другие выпускают скоростные, прочные, манёвренные устройства с продвинутым управлением и ёмкими аккумуляторами. Но их реже оснащаются видеокамерами, потому что большое значение для скорости хода имеет вес.
Профессиональные
Эти модели используются в производственных и исследовательских целях. Они уже не являются дорогими игрушками для пилотирования в парке по выходным. Это мощные и устойчивые аппараты, которые нужны для снятия картографических или геологических данных, наблюдения за местностью с воздуха.
Сфера использования:
- водное, лесное, сельское хозяйство;
- городское и дорожное строительство;
- энергетика;
- геодезия и геология.
Для профессиональных коптеров большое значением имеют мощность и автономность. Это связано с тем, что во время работы погодные условия не всегда идеальны, нужно покрывать большие расстояния. А еще в таких условиях нужен мощный передатчик для управления и функция автопилота, чтобы при потере сигнала коптер сам автоматически возвращался на базу.
Триммирование
Как оказалось, фраза “снять усилие со штурвала” оказалась не пустым звуком. Все попытки сделать систему обратной связи по тангажу так, чтобы точно удерживать высоту, и при этом охватить весь диапазон изменений режимов полета, оказались тщетны. Либо самолет входит неустойчивый режим с колебаниями по высоте при большом усилении петли ОС, либо не точно удерживает высоту.
Кроме того, при большой скорости подъемная сила может стать настолько большой, что руль высоты не справляется (из-за недостаточного коэффициента усиления петли ОС), и самолет начинает все время набирать высоту. Либо снижается, не имея возможности выйти на большие углы атаки при маленькой скорости. Таким образом применена система триммирования руля высоты со следующим алгоритмом:
- Eсли есть задание увеличивать высоту и высота действительно растет, то триммирование не производится.
- Если есть задание увеличить высоту, но она падает, или не меняется, то начинается триммирование стабилизатора в набор, пока не начнется набор высоты.
- Если требуется снижение и происходит снижение, то триммирование не производится
- Если требуется снижение, но при этом высота не меняется или идет набор высоты, то начинается триммирование руля высоты вниз.
Триммирование производится значительно медленнее, чем управление автопилота 0, поэтому самовозбуждение петли обратной связи не происходит.
Посадка
Как известно, самым сложным элементом полета является посадка. Поскольку мой автопилот предназначен для радиоуправляемой модели, требования к посадке можно упростить. Здесь посадка выполняется в режиме планирования. При этом автопилоту дается задание при подлете к месту посадки (посадочный курс удерживается по GPS) удерживать скорость 0 и высоту, например, около 200 ft — немного больше чем высота полосы.
При этом автопилот удерживает самолет в правильном полетном положении, постепенно увеличивая при снижении угол атаки. Такая посадка не годится для тяжелых самолетов, для них нужно требовать не нулевую скорость, а минимальную для данной конфигурации самолета, не достигая при этом сверхкритических углов атаки.
В фильме можно увидеть посадку и также увидеть, как работают алгоритмы автопилота при триммировании и пролете по маршруту. Это в симуляторе. Посадку реального самолета можно увидеть в испытании 17.10.2017. Она произошла не штатно из-за разряда аккумулятора, но вполне красиво, т.е. так, как и задумано.


, цена 4600 руб")




