

Beam-роботы: интервью марка тилдена
Да, у нас есть кооперирующиеся роботы, и мы работали над рядом самособирающихся и самомодифицирующихся машин в течение нескольких лет. Механизмы контроля, позволяющие им делать это, могут находиться на значительном расстоянии. Но поскольку они имеют некоторые знания друг о друге, они работают синхронно, и это действительно интересно.
Когда вы смотрите на людей, идущих по улице с одинаковой скоростью, как вы можете отличить, кто из них с кем связан? По движению ног. Те люди, кто знакомы друг с другом, идут синхронно. Муж и жена всегда идут в ногу. Посмотрите на людей, идущих не в ногу друг с другом, и вы поймете, что, хотя они и передвигаются с одинаковой скоростью, их действия не синхронны, следовательно, они не имеют друг к другу отношения. Это очень странно, но это действительно так.
Все ваши создания действующие, не так ли?
Полагаю, все. Некоторых из них мы склеили, поскольку они были сломаны или устарели и могли лишь дрожать в руках. Дисплей приклеен, чтобы он не упал при движении. Он включен сейчас. Но поскольку инцидентность света ортогональна по отношению к солнечным батареям, то робот не все время движется. Но здорово то, что вы можете оставить его в таком состоянии на 6-7 месяцев, и он будет прекрасно себя чувствовать.
Жизнь обычных роботов зависит от зарядки батарей или обновления программного обеспечения – и это всегда проблема. Но с нашими роботами все гораздо проще. Например, мой робот-уборщик нуждается лишь в том, чтобы его раз в год ставили в посудомоечную машину для очистки от грязи и пыли.
А как работают ноги у роботов? Как эти роботы двигаются?
Оригинальность способа, который мы применяем здесь, заключается в том, что сигналы, генерируемые в наших созданиях, апериодичны. Другими словами, они движутся назад и вперед. То есть если вы поставите эти создания на колеса, то получите машины, которые двигаются назад-вперед, назад-вперед… Но проблема с колесами заключается в том, что они имеют очень ограниченные возможности и размеры. Это означает, что они не могут перемещаться во всевозможных направлениях одновременно. И любой, кто когда-нибудь оказывался в инвалидном кресле, поймет это. Если у вас есть ноги, вы имеете возможность поступательного движения: вы можете перемещаться трапециоидально, боком, назад, вы можете вращаться вокруг себя на одном месте. И вы не задумываетесь над тем, как вы это делаете. Но это лишь до тех пор, пока вы не начинаете делать что-либо похожее, скажем, на то, как вы идете по коридору и какой-то парень идет вам навстречу… В этом случае вы пытаетесь не столкнуться с ним и внезапно оба понимаете, что ваше поведение походит на исполнение какого-то забавного короткого танца. И если бы вы были в инвалидном кресле, то не избежали бы столкновения, поскольку для этого требуется некоторая гибкость, то есть возможность изменения траектории движения.
И когда наши создания нуждались в большей гибкости, мы приделывали им ноги, чтобы, двигаясь по одному пути, они могли бы в случае необходимости пойти по другому пути. Это очень важно: это позволяет огибать препятствия.
Классический пример: вы видите своего приятеля в баре. Вы знаете, где он, вы видите его все время, но вы должны преодолеть расстояние до бара через множество преград, большинство из которых – движущиеся объекты, например люди. Это невероятно сложно. Подумайте о Законе удара. Вот почему расстояние между автомобилями на скоростной трассе должно быть не менее длины одной машины – в противном случае возможна авария. А люди в оживленном месте могут разойтись в миллиметрах друг от друга, и нас это не удивляет. А все потому, что люди – сложные существа, способные взаимодействовать между собой. Если бы автомобили были на это способны, то все дорожные инциденты остались бы в прошлом.
А какова ваша домашняя жизнь? У вас есть какие-нибудь из этих роботов дома?

Я думаю, что, переезжая в новый дом, люди будущего будут оставлять роботов в старом жилище так же, как оставляют электрические лампочки, не потому, что они не замечают их наличия, а просто считая, что это неотъемлемая часть дома и ни к чему брать их с собой. И дом будущего будет местом, где окна чисты, полы вымыты, тараканы выведены, и у вас стандартное освещение, и у вас нет кучи проводов для управления всем этим, поскольку всегда достаточно энергии для дистанционного контроля.
То есть ваш дом полностью самоочищается. И даже если вы долгое время отсутствуете, уборка происходит сама собой. Это характерная черта будущего, это не безумная мечта.
Роботы станут меньше по размеру, не так ли?
Не совсем. Существует размерный предел, в котором вы фактически можете делать определенные виды данных механизмов. Мы стараемся делать их наиболее эффективными и компактными, столь же эффективными, сколь и малыми по размерам. Конечно, нам хотелось бы сделать семейство роботов размером в миллиметр или около того. Нам действительно хотелось бы иметь умную пыль. Поле для применения таких роботов в медицине огромно. Представьте, вы глотаете таблетку, которая способна сделать хирургическую операцию, – таблетку, наполненную такими роботами, и они делают операцию внутри вашего тела, а затем выводятся из организма с мочой. И вам не нужно беспокоиться, что они останутся в вашем теле: все они выйдут из него. И именно такие роботы крайне популярны сейчас. Но, к сожалению, я единственный человек в мире, имеющий контроллеры достаточно маленького размера, чтобы их можно было использовать в таком мизерном роботе.
У технологий нейронных сетей есть несколько поразительных преимуществ. Например, вы не можете уменьшать компьютер до размеров человеческой клетки и управлять его операционной системой. Но вы можете сконструировать таких нейронных роботов, которые, хочется верить, будут проникать в тело человека и совершать там нечто осмысленное…

Для большинства людей область робототехники ассоциируется лишь с поражающими воображение движущимися куклами, и они хотят сконструировать Джонни 5, C3PO, то есть некое подобие монстра Франкенштейна. Но когда вы смотрите на все это, вы должны помнить, что Айзек Азимов – писатель-фантаст. Все роботы из художественных произведений жанра научной фантастики таковы, чтобы при помощи спецэффектов в стиле Джима Хенсона выглядеть живыми марионетками на экране. И когда вы видите робота на веревках, скрытых за занавесом, то вы смотрите лишь на что-то подобное представлениям Волшебника из страны Оз. “Не обращайте внимания на суперкомпьютер за кулисами, я великий и всемогущий повелитель роботов Оз!” И если вы не видите этих веревок за кадром, вам начинает казаться, что куклы-роботы движутся сами, и вам представляется, что они действительно могут существовать в реальном мире, выполняя для вас какую-либо работу.
Как некоторые из BEAM-роботов расширяют наши представления об интеллекте?
Они не расширяют этих представлений. Да, подобная дискуссия в области искусственного интеллекта и общих когнитивных исследований сейчас актуальна. Но искусственный интеллект основан на концепции рациональности, которая предполагает, что человек – врожденно рациональное существо. Но если вы когда-либо попытались проанализировать поведение женщины, то вы, думается, убедились, что данная концепция ошибочна!
Человеческое поведение многовариантно. Мы стоим на тех позициях (и они очевидны!), что человек – существо иррациональное. И именно это свойство человеческой природы дает нам потенциал для творчества и является фундаментальным качеством нашего сознания. Что собой представляет мыслящее живое существо? Какова основополагающая особенность человеческого сознания? Это способность заставить себя что-то делать произвольно, чтобы удовлетворить жизненные потребности. Это не только способность выживать, это способность находить оптимальные пути для существования. То есть создавать различные вещи для этого – строить машины, которые делают различные виды работы для вас, оптимизировать их таким образом, чтобы они, сосуществуя в одном мире с вами, могли сделать вашу жизнь счастливой.
И это действительное будущее робототехники, а не то, что вы ожидаете от нее, программируя машины. Роботы, которые будут находиться в реальном мире, будут совсем не такими, какими вы их себе представляете. И все это начнется с изменения парадигмы нашего преставления о разумных машинах. И это потому, что мы – иррациональные существа.
А какая память у этих созданий?
У них нет памяти. Все, что у них есть, – это изменение состояния между комплексами различных областей деятельности. Когда у вас есть нелинейный осциллятор, он заставляет робота двигаться по очень сложной орбите.

Фундаментальное свойство наших моделей состоит в том, что у них нет памяти в общепринятом понимании и мы не сможем ее создать, если, конечно, не найдем такого гениального математика, который нашел бы способ упорядочить N-ное количество нелинейных дифференциальных производных и привести их в соответствие с классической нейронной сетью Хебиана. Это то же самое, что пытаться смешать яблоки и апельсины и получить шоколадный сок, – этого просто не получится.
Ваши BEAM-роботы полностью аналоговые, или в них все же есть цифровой аспект?
Мы стараемся акцентироваться на аналоговых механизмах. Мы берем цифровую электронику и заставляем ее работать в аналоговом режиме. Это дает нам такую совместимость, что мы можем поместить в наши создания цифровой контроллер. И для большинства наших заказчиков это как раз то, что им надо. Они уже имеют определенный вид устройства, то есть компьютер, который дает им определенный отклик на то, что они хотят. Но они не знают, как приспособить его к условиям реальной жизни. Таким образом, они приходят к нам и говорят: “Мы хотели бы достичь взаимодействия с реальным миром, то есть преодолеть разрыв между интерфейсом компьютера, нервной сетью, корпусом и окружающей действительностью”. Это фактически и есть цифровой аспект. Мы никогда не игнорировали его, и практически все, что мы делаем, можно назвать нейросетевым инженирингом.
Но когда мы ведем исследования, наш основной интерес составляет попытка найти в максимальной степени удобную оболочку для того компетентного поведения, которое можно ожидать от минимального по размеру функционирующего контроллера. Я могу продемонстрировать вам нечто подобное. Этот механизм на 24 транзисторах ведет себя, как маленький Франкенштеин. Он меньше, чем даже можно было себе представить. Но этого достаточно, чтобы понять, что он из себя представляет. Это совсем не то, что могло бы сказать о себе: “О, я совершенство, я могу запомнить все, что заложено в последней операционной системе Windows”, – это нечто с мигающими огнями, которое вы видите перед собой, так странно выглядит, что его почти невозможно анализировать. Но когда вы видите нечто, чьи ноги передвигаются, – даже ребенок способен понять это. И это ближе к тому, что мы называем новой генерацией робототехнических стандартов в отношении способностей.
Тест Тьюринга – это тест, созданный Аланом Тьюрингом, который сказал, что компьютер представляет собой некую форму жизни, если он может беседовать с вами в вопросно-ответной форме. Мы подошли к тому, что можно назвать “мурлыкающим тестом”, суть которого в том, что если робот имеет реальные способности для того, чтобы подражать кошке, то вы на пути создания действительно автономной формы жизни.
Я несколько удивлен, что вы не работаете в Santa Fe Institute [center of the artificial life movement – центр развития искусственных форм жизни].
Это на самом деле была моя мечта. В 1993 году я сделал кое-что ставшее весьма известным, и кто-то сказал мне тогда: “Тебе бы следовало поехать в Штаты”. (В то время Тилден жил и работал в Канаде – прим. radiocopter.ru.) Тогда я загрузил свой грузовик и отправился туда. И я действительно надеялся, что я начну работать на людей из Santa Fe Institute. Но вот что произошло… Они продемонстрировали мне некоторые из их искусственных форм жизни и сказали: “Конструируй подобных роботов”. Я посмотрел на их вещи и вдруг понял, что все, что они используют, хорошо для компьютерной модели: вся эта оснастка, бесконечные источники питания, все эти математические идеализмы, которые очень хорошо работают внутри компьютера, но совсем не могли бы работать в реальном мире, не ломаясь… В нашем мире нет ничего прямолинейного, – того, что есть внутри компьютера. Так что я поступил, как Скотти из “Звездного похода” (“Star Trek”), сказав: “Мне жаль, Капитан, но я не могу изменить законов физики!” Они подумали, что я слишком упрям.
Но фактически получается, что, на какую из разработок Santa Fe Institute ни посмотришь, – все они жизнеспособны лишь внутри компьютеров. И когда разработчики из Santa Fe Institute говорят, что их создания имеют отношение к реальной жизни, а ты начинаешь анализировать это с физической точки зрения, то вдруг понимаешь, что они хотят уподобить наш мир большим компьютерам, внутри которых их вещи будут хорошо работать.
Но реальность основана совсем на других правилах. И их целый ряд: внутри компьютера чрезвычайно регулярные условия, которые Santa Fe Institute постоянно пытается навязать реальным комплексным системам. Реальный мир – сложная среда, которую SFI (Santa Fe Institute – прим. radiocopter.ru) пытаются регламентировать. Проблема в том, что Windows не может работать в этой реальности. Но даже если бы у них получилось создать такую операционную систему, вы вряд ли захотели бы этого, поскольку компьютер с возможностями ее обслуживания должен быть размером с Луну. Мы не сможем учесть все возможные случайности иррационального мира. Поскольку, если вы видите что-то на экране монитора, это совсем не означает, что нечто подобное можно осуществить в реальности. Именно эта особенность делает всю работу SFI просто складом игрушек. Это утомительный труд, обреченный на неудачу. SFI делает много действительно замечательных созданий. Они существенно изменили лицо науки. Но факт остается фактом: до тех пор пока они смотрят на мир через экран монитора, я боюсь, они не будуть нуждаться в том, что делаю я.
Это роботы, над которыми вы работаете для правительства, ведь для ваших конструкций есть масса областей применения в военных и правительственных целях?
Нет, в действительности мы не имеем большого количества военных и правительственных заказов, хотя мне хотелось бы этого. Но проблема в том, что то, над чем мы работаем, основано на принципиально новой концепции робототехники, и, к сожалению, она еще не получила достаточной популярности. Я представил зрительской аудитории свои машины, не имеющие отдельного компьютера внутри, и она отвергла их. Я привык к ужасу большинства международных соревнований – соревнований роботов-мышей, передвигающихся роботов – транспортных средств, самодельных роботов вроде этого и т.д. И я выставлял свои модели, а они топали по головам MIT-овских роботов (MIT – Масачусетский Технологический Институт – прим. radiocopter.ru). И потом я размышлял над этой ситуацией и понял, что я не заработаю большой популярности. Представьте, вы пришли с роботом, который по существу самодостаточен, и вы только сидите, засунув руки в карманы. И это раздражает большинсто людей, потому что, когда кто-то провел последние 10 лет, конструируя шестиногого жука, а вы построили что-то из пары вышедших из употребления Walkmans и это нечто столкнуло их робота с арены сумо, – это действительно бесит людей, ведь они любят свои компьютеры. Я тоже люблю свой компьютер, но я знаю, что я никогда не буду приделывать к нему ноги.
Вы упомянули, что один из этих роботов взаимодействовал с вашей кошкой. Были ли еще какие-нибудь взаимодействия с живыми существами, кроме людей?
Да, эта машина прямо здесь, вы, вероятно, еще сможете увидеть ее. На ее шее царапины. Вначале мы даже демонстрировали ее в доме друзей, она была неподвижна, но, когда ее включаешь, она походит на своего рода невероятного ходячего паука. У моего друга было три громадных сильных собаки, и первое время, когда они видели движение этого существа, они просто с ума сходили. Я был вынужден схватить одну, мой друг – другую, но мы не могли удержать третью, которая буквально изгрызла шею робота. И это удивительно, потому что, когда робот был выключен, они не обращали на него внимания, но когда он начал двигаться, всем им внезапно показалось, что он представляет угрозу.
Что было в этой вещи такого представляющего для них угрозу? Ведь в доме были радиоуправляемые машины, которые буквально ездили у собак под ногами (знаете, такие, как у маленьких мальчиков). Почему же именно наш робот вызывал у них ощущение угрозы? Мы не знаем, но это как раз то, что мы назвали “мурлыкающим тестом”. Это происходит, когда что-то движется так же, как настоящее животное, таким образом, что заставляет нас думать, что оно живое, а не предсказуемое периодическое устройство наподобие игрушки. Правда? И эта непредсказуемость движений заставляет других животных немедленно ее чувствовать. Это очень странно. Я имею в виду то, что мы можем ощущать это на себе. Мы можем видеть это каждый день, как плохой спецэффект в фильме. Посмотрите на динозавров в Jurassic Park. Я хочу сказать, что, когда видишь их впервые, – они поражают. Но потом вы вдруг понимаете, что эти животные мертвы и периодичны, и очевидно, что они походят на людей, которые делали все движения для них…
Другая крайность – это R2D2, то есть конструкция без всяких компетенций. Но поскольку он был так чужероден для нашего понимания, мы вложили в него наши собственные представления о том, как он должен себя вести. И вы больше всего ужасаетесь, когда видите человека, который пытается говорить за своего щенка. Это выглядит примерно так: “О, мистеру Фу-Фу это не нравится”. Не то чтобы мистер Фу-Фу имел какое-нибудь мнение, он только объедается и все портит, как большинство маленьких детей, как я заметил. Теперь мы также знаем, что по существу это очень интересные реакции, которые мы можем наблюдать у животных и маленьких детей, и это заставляет нас предположить, что это тоже может быть частью будущего робототехники – гораздо более приемлемым, чем сегодняшние представления о нем.
Вы обучаете вашему технологическому подходу, не так ли?
Столько, сколько могу. Мы организуем Международные Игры BEAM-роботов (International BEAM Robot Games). Сейчас в них уже принимают участие люди с 6 континентов, и мы проводим около 20-30 семинаров в год, и всегда один раз в год – серьезные официальные Игры роботов. Призеры более локальных игр приезжают и участвуют в них, а победителей показывают по национальному телевидению.

Существует масса соревнований, где вы можете увидеть 20-30 детей, соревнующихся в гонках роботов на солнечных батареях или в играх роботов-баскетболистов. Но когда вы действительно проходите между этими детьми, всеми этими предводителями болельщиков, всеми этими людьми, то вдруг где-то за их спинами вы видите какого-нибудь паренька. И вы видите, что этот паренек прекрасно умеет работать руками, но совсем не умеет держаться перед камерой. И тогда вы поворачиваетесь к нему лицом и даете ему возможность рассказать о своем роботе, и чем дальше, тем увереннее он начинает держаться, рассказывая о своей машине и высказывая свое мнение о ней. И я думаю, что такой подход просто необходим.
Двадцатый век был веком, в котором инженер всегда оставался на заднем плане, в то время как парни в костюмах и с хорошими прическами были на виду. Теперь, я хочу сказать, инженеры должны встать и заявить о себе. Если у вас есть идея, вы должны говорить о ней, показывать и реализовывать ее. Не философствуйте, не размышляйте о том, что однажды роботы уничтожат нас. Нет. Этого не случится. Я это точно знаю, потому что посвятил этим экспериментам 10 лет.
Единственная вещь, по поводу которой я беспокоюсь, – это визиты моей мамы. Тогда мне приходится подбирать всех моих роботов и бережно уносить их подальше от нее, потому что мама хорошо помнит эпизод из фильма “Doctor Who” и ей все время кажется, что роботы восстанут против нее среди ночи. И хотя я много раз говорил с ней на эту тему, я так и не смог переубедить ее. Но я знаю, что в конечном счете в реальном мире дети будут видеть таких роботов. Сначала дети будут смотреть на них, потом начнут играть с ними, потом попытаются сломать их… А после всего этого роботы просто будут убирать комнаты, а дети перестанут замечать их, выражая недовольство лишь по поводу их бренда. Вот что случится в будущем.
Мы стараемся подтолкнуть детей к тому, чтобы они начали конструировать. И не только создавать что-то самостоятельно, но и уметь общаться с людьми, демонстрируя свои умения и модели. И это основная задача Игр BEAM-роботов.
У нас есть еще масса проектов, рисунков, видеороликов и, конечно, выступлений на каналах Discovery, Learning Channel, BBC, ITV в соответствующих программах. Мы весьма популярны на телевидении благодаря нашим роботам. Я могу поставить дюжину конструкций на стол и спорить по их поводу весь день, а они будут работать. И операторам это нравится в сравнении с тем, как это делают другие… Я не буду называть имя организации, я только скажу, что она сделала 300 моделей и лишь одного действующего робота, который сломался прямо во время шоу перед камерой. И это непростительно! Но это классический пример того, что мы называем “барьером сложности”. Как много усилий было брошено на то, что так плохо работает и мало приемлемо в реальности! Хитрость должна быть в том, как добиться максимального результата, используя для этого миниум средств.
перевод radiocopter.ru
26.08.2007
Как сделать beam-робота
Алексей Будников
Еще недавно все эти Электроники, Терминаторы и прочие Железные Дровосеки рождались исключительно в бурном воображении фантастов. Однако уже сейчас сосуществование робота и человека стало уже почти обыденным, и все чаще звучат слова о том, что третье тысячелетие будет принадлежать именно этим искусственным созданиям. (Андрей Ильин)
Введение
Робототехника с каждым месяцем развивается, появляются новые виды роботов, новые возможности; количество инвестиций в сферу робототехники с каждым годом увеличивается, привлекается все больше молодых ученых, самоучки-робототехники потрясают своими безумными изобретениями…
Этот список можно продолжать еще долго. Но основная мысль все выше сказанного – РОБОТОТЕХНИКА ШАГАЕТ СЕМИМИЛЬНЫМИ ШАГАМИ.
Именно в данный момент, в настоящее время, в то время, в которое живем мы с вами, развиваются роботы! Развивается целая индустрия, которая в будущем будет многим приносить миллионы. Как говорится, океану пофиг черпаешь ты из него ложками или цистернами.
Именно сейчас нужно ловить волну!
К этому я вас призываю и помогаю. Помогаю тем, что делюсь своим опытом, своими знаниями…
Создание робота
Все…хватит всяких речей, нужно действовать!
Как вы уже поняли, будем мы делать робота, который будет ехать к источнику света и останавливаться, если такового нет. Стоит сказать, что это самый простой робот, которого может сделать каждый без какого-либо образования. Схема создания данного робота описана на многих сайтах, но ни на одном из них не написано как действительно нужно соединять все провода, микросхемы, двигатели и другое. Одно дело, когда человек видит голую схему, которую не каждый и поймет, а другое дело, когда все дотошно и понятно показано на фотографиях.
В этой статье я ничего нового не открываю, не делаю какого-то нового робота.
Я просто взял схему робота, описанную на многих сайтах рунета, сделал по ней робота. Но все свои действия я сфотографировал.
.gif)
Данная статья представляет собой небольшой пошаговый обучающий курс по созданию реального робота.
Шаг 1
Итак…наша задача сделать BEAM-робота. Что для этого нужно?
- L293D (драйвер двигателей) – 280 рублей (1 штука)
- Резистор не мене 100 Ом (я использовал 180 Ом) – 36 рублей (2 штуки)
- Фототранзистор – 23 рубля (2 штуки)
Это основные детали, которые нам понадобятся. Но нужен еще корпус робота, источник питания, двигатель и колеса.
Я не захотел изобретать велосипед и поэтому взял корпус от своей старой игрушки, два электромотора 203:1 и гусеничное шасси. И у меня получилась вот такая конструкция.

Но не думаю, что у вас есть такая же игрушка. Поэтому альтернативным вариантом будет создания корпуса из… дерева. Да-да – из дерева. Не пугайтесь. Конечно, вы можете сделать и из пластмассы, но не у каждого она есть. А вот дерево везде можно найти.
Корпус нашего робота будет состоять из прямоугольника со сторонами 100 мм на 60 мм (ширина может быть больше, если вы будете использовать электродвигатели больших размеров).

Вот такая конструкция должна получиться, если вы будете делать корпус из древесины. Цифрами обозначены:
- Электромотор с колесом
- Электромотор с колесом
- Шарик со сквозным отверстием, через которое пропущена проволока и прикреплена к корпусу
Думаю, что с корпусом вы дальше сами разберетесь, потому что это не самая главная проблема, которую нам нужно решить, да и если вы захотели сделать робота, то смекалка у вас точно должна быть.
Шаг 2
Ну что же… вы сделали корпус и теперь можно приступать к паяльным работам.
Я не буду рассказывать про всякие параметры L293D: об этом вы можете прочитать на других сайтах. Я покажу вам фотографии, на которых вы наглядно увидите, что и куда нужно подсоединять.
Поехали!
Для начала берем L293D и разгибаем входы-выходы.


Шаг 3
К двум электромоторам припаиваем четыре провода.

Шаг 4
Берем держатель батареек и припаиваем к минусу два провода.

Шаг 5
Теперь берем пять проводков, и соединяем их вот так.

К этой конструкции подсоединяем резистор, фототранзистор и еще один провод. Очень важно: резистор припаиваем к короткой ножке фототранзистора, а синий провод – к длинной.

Шаг 6
Сейчас будем все подсоединять к драйверу двигателей.
Для начала – четыре провода к ENABLE1 и Vss, Vs и ENABLE2.

Подсоединим фототранзисторы к INPUT1 и INPUT4.

Шаг 7
Ну а сейчас соединим получившуюся конструкцию с двумя двигателями.
На рисунке: верхний мотор припаиваем к OUTPUT1 и OUTPUT2, а нижний к OUTPUT4 и OUTPUT3.

Шаг 8
Вот практически и все: осталось только все это соединить с источником питания. Я использовал три батарейки типа АА на 1.5 В.
Сначала подсоединим минус (черный провод, к которому подсоединены два синих – GND и GND, GND и GND)

Ну а красный провод (плюс) – от держателя батареек к концу левого резистора.

Как видно на рисунке, я припаял красный провод не напрямую к резистору, а через выключатель.

Заключение
Вот мы с вами и сделали несложного BEAM-робота, который реагирует на световые лучи.
Конечно, можно сделать так, чтобы наш робот следовал за рукой или по линии, но это уже отдельная история, к которой мы еще вернемся.
robot-blog.ru
Проектная работа на тему: «роботы и робототехника вчера, сегодня, завтра. роботы в современном мире»
Задачи исследовательской работы:
1.Узнать суть понятия «роботы»
2.Изучить историю развития роботов.
3.Создать робота своими руками.
4.Выяснить степень развития робототехники

Роботы и робототехника вчера, сегодня, завтра. Роботы в современном мире.
Работу выполнил:
ученица 10 класса
Лямина Ксения
Учитель:
Сахарова Ольга Сергеевна
Школа – пансион «Плесково»
2023 г
О чем книга«Последнее изобретение человечества: Искусственный интеллект и конец эры Homo sapiens»
- За каких-то 10 лет искусственный интеллект сравняется с человеческим, а затем и превзойдет его. Корпорации и государственные структуры по всему миру, конкурируя между собой, вкладывают миллиарды в развитие искусственного разума. Но что ждет нас дальше? Ученые задаются вопросом: не окажется ли это изобретение последним — гибельным для нас самих? Достигнув определенного уровня развития, искусственный интеллект сможет сам себя совершенствовать, без участия человека. У нас появится соперник хитрее, сильнее и враждебнее, чем мы можем себе представить.Как именно машины будут брать власть? Существует ли наиболее вероятный, реалистичный сценарий, который нам угрожает?
Опрос учащихся
- Каково значение слова «Робот»?
- Какие виды роботов вы знаете?
- Приведите примеры использования роботов в быту и технике?
- Какие законы робототехники вы знаете?
- Как вы считаете, развитие роботов угрожает человечеству? Почему?
- Как вы считаете, есть ли необходимость использования роботов? Почему?
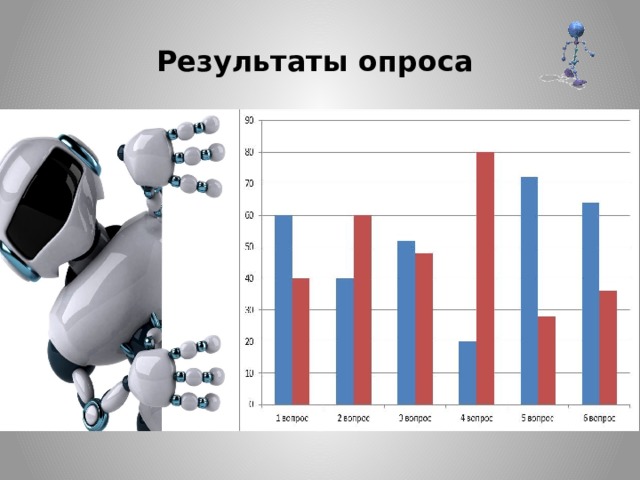
Результаты опроса

Цель исследования – смогут ли роботы полностью заменить деятельность человека в будущем?
Проблема: расширение знаний о роботах и робототехнике, их расширяющемся влиянии в жизнедеятельности человека. Техническое самообразование.
Актуальность исследования:
В современном обществе идет внедрение роботов в нашу жизнь, очень многие процессы заменяются роботами. Сферы применения роботов различны: медицина, строительство, геодезия, метеорология и т.д. Очень многие процессы в жизни, человек уже и не мыслит без робототехнических устройств (мобильных роботов): робот для всевозможных детских и взрослых игрушек, робот – сиделка, робот – нянечка, робот – домработница и т.д. Специалисты, обладающие знаниями в этой области сильно востребованы.
Объект: роботы различной модификации и робототехника.
Методы: поисковый, анализ, экскурсия, наблюдение, обобщение.
Задачи исследовательской работы:
- изучить литературу по теме « Роботы »;
- познакомиться с историей изобретения роботов;
- виды и классификация роботов;
- изучить устройство простого робота и условия, при которых он работает;
- преимущества и недостатки изобретения роботов;
- провести опыты по изучению работы роботов .

«Робостанция» на ВДНХ

«Робостанция» на ВДНХ
План проекта
- История создание роботов.
- «Законы робототехники»
- Преимущества и недостатки изобретения роботов
- Робототехника
- Классификация роботов
- Физика роботов
- Компоненты роботовСпособы перемещения
- Компоненты роботов
- Способы перемещения
- Направления развития робототехники.
- Способы контроля
- Искусственный интеллект
- Робототехника в России
- Заключение

А вдруг?

История создания роботов
Что же такое робот?
Робот
(чеш. robot, от robota — подневольный труд или rob — раб) — автоматическое устройство, созданное по принципу живого организма.

Законы робототехники
- Робот не должен причинять человеку вред или допускать, не вмешиваясь, чтобы человеку был нанесен ущерб.
- Робот должен выполнять приказания, отдаваемые людьми, за исключением тех случаев, когда они приводят к нарушению закона 1.
- Робот должен защищать свое существование, за исключением тех случаев, когда такая защита может привести к нарушению законов 1 и 2.

Преимуществаинедостаткиизобретения роботов
1. теоретическая бессмертность;
2. потенциальная приспособленность к любым условиям обитания;
3. легкость получения новых особей — можно собирать промышленным способом;
4. легкость обучения — достаточно скопировать программу другого робота в нового робота;
5. робота можно отключить, если он не нужен, и хранить в таком виде.
1. изготовление более-менее универсального и надёжного робота обходится слишком дорого;
2. настоящий искусственный интеллект не создан.

Робототехника (от робот и техника ; англ. robotics — роботика , роботехника ) — прикладная наука , занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой интенсификации производства.
Классификация роботов
- По способу передвижения
- По отрасли применения
- Наличие интеллекта
Важнейшие классы роботов
- манипуляционные
- мобильные роботы

Физика роботов
Компоненты роботов
Приводы: это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах являются электрические, но применяются и другие, использующие химические вещества или сжатый воздух.
- Двигатели постоянного тока(электродвигатели)
Двигатели постоянного тока быстро вращаются, когда через них проходит электрический ток. Если ток пустить в другом направлении, двигатели будут вращаться в обратную сторону.
Они поворачиваются пошагово на определённый угол под управлением контроллера. Такие двигатели часто используются в приводах многих роботов и станках с ЧПУ.
- Пьезодвигатели(ультразвуковые двигатели)
Принцип их работы весьма оригинален: крошечные пьезоэлектрические ножки, вибрирующие с частотой более 1000 раз в секунду, заставляют мотор двигаться по окружности или прямой. Пьезодвигатели уже доступны на коммерческой основе и также применяются на некоторых роботах.
простое, но мощное устройство для обеспечения силы тяги. При накачивании сжатым воздухом мышцы способны сокращаться до 40 % от своей длины. Так как способ их работы схож с биологическими мышцами, их можно использовать для производства роботов с мышцами и скелетом, аналогичными мышцам и скелету животного.
это вид пластмасс, который изменяет форму в ответ на электрическую стимуляцию. Они могут быть сконструированы таким образом, что могут гнуться, растягиваться или сокращаться
Это — многообещающая экспериментальная технология, находящаяся на ранней стадии разработки. Отсутствие дефектов в нанотрубках позволяет волокну эластично деформироваться на несколько процентов. Подобные компактные «мышцы» могут помочь роботам в будущем обгонять и перепрыгивать человека.

Способы перемещения
1.Колёсные и гусеничные роботы
- шестиколёсные роботы
- четырёхколёсные роботы
- двухколёсные роботы
- одноколёсные роботы
- гусеничные роботы
2.Шагающие роботы
3.Прыгающие роботы
4.Летающие роботы
5.Ползающие роботы
6.Роботы, перемещающиеся по вертикальным поверхностям
7.Плавающие роботы.

Направления развития робототехники
Промышленные роботы

Сельскохозяйственные роботы

Бытовые роботы

Персональные роботы
Персональный робот -тип роботов, которые в отличие от промышленных роботов будут компактны, недороги и просты в использовании. Прямая аналогия с понятием персональный компьютер

Военные роботы

Космические роботы

Нанороботы
молекулярный мотор

Медицинские роботы
Роботы-программное обеспечение

Социальный робот

Андроид

человекоподобный робот

Роботы-игрушки

Удивительный зоопарк механических животных
Искусственный интеллект
- 1.наука и технология создания интеллектуальных машин , особенно интеллектуальныхкомпьютерных программ ;
- 2. свойство интеллектуальных систем выполнять творческие функции, которые традиционно считаются прерогативой человека.
- ИИ связан со сходной задачей использования компьютеров для понимания человеческого интеллекта , но не обязательно ограничивается биологически правдоподобными методами

Искусственный интеллект

Робототехника в России
Будущее робототехники


