

Бензиновые квадрокоптеры и мультикоптеры. краткий обзор
Квадрокоптеры неожиданно ворвались в нашу жизнь и распространились повсеместно. Они получили свой второй шанс на жизнь, впервые появившись в первой половине прошлого века. Однако их основная проблема так до сих пор и не решена, — над чем и бьются множество компаний и отдельных энтузиастов.
Мультикоптер (англ. Multirotor, multicopter, многороторный вертолёт, многолёт) — летательный аппарат, построенный по вертолётной схеме, с тремя и более несущими винтами
Многовинтовые вертолёты разрабатывались ещё в первые годы вертолётостроения. Один из первых квадрокоптеров (англ. quadcopter, четырёхроторный вертолёт), который реально оторвался от земли и мог держаться в воздухе, был создан Георгием Ботезатом и испытан в 1922 году.

Источник картинки: wikipedia.org
Новое рождение мультикоптеры получили в XXI веке, уже как беспилотные аппараты. Благодаря простоте конструкции квадрокоптеры часто используются в любительском моделировании, также удобны для недорогой аэрофото- и киносъёмки.
В последнее время появились миниатюрные квадрокоптеры, умещающиеся на ладони (Walkera Ladybird, WLtoys V929, Blue Arrow nano Loop и пр). Они практически безопасны (масса аппарата менее 100 г), в то же время позволяют получить основные навыки полёта на мультироторном аппарате, так как принцип их управления ничем не отличается. Квадрокоптеры такого размера возможно запускать дома, не рискуя нанести вред людям или предметам. Некоторые модели разгоняются до впечатляющих 26 м/с[13], имеют высокое качество съёмки и управляются на расстоянии более 3,5 км.
По принципу управления мультикоптеры существуют:
Мультикоптеры имеют 3 или более винтов постоянного шага (автомата перекоса, в отличие от одно- и двухвинтовых аппаратов, нет). Каждый винт приводится в движение собственным двигателем. Половина винтов вращается по часовой стрелке, половина — против, поэтому рулевой винт мультикоптеру не нужен. Маневрируют мультикоптеры путём изменения скорости вращения винтов. Например:
Микропроцессорная система переводит команды радиоуправления в команды двигателям. Чтобы обеспечить стабильное зависание, мультикоптеры в обязательном порядке снабжают тремя гироскопами, фиксирующими крен аппарата. Как вспомогательный инструмент, иногда, также используется акселерометр, данные от которого позволяют процессору устанавливать абсолютно горизонтальное положение, и бародатчик, который позволяет фиксировать аппарат на нужной высоте. Также применяют сонар для автоматической посадки и удержания небольшой высоты, а также для облёта препятствий. Использование GPS-приёмника позволят записывать маршрут полёта заранее, с компьютера а также возвращать аппарат в точку взлёта, в случае потери управляющего радиосигнала, или снимать параметры полёта оперативно или потом.
Винты могут быть установлены непосредственно на вал двигателя, либо через редуктор.
В любительских и профессиональных мультикоптерах используются коллекторные и бесколлекторные электродвигатели и литий-полимерные аккумуляторы в качестве источника энергии. Это накладывает определённые ограничения на полётные характеристики: типичная масса мультикоптера составляет от 1 до 4 кг, при времени полёта от 10 до 30 минут (30—50 минут у уникальных единичных экземпляров). Запас энергии батарей позволяет отдельным моделям мультикоптеров улетать на расстояние до 7—12 км, на практике же радиус действия (максимальное расстояние, на которое они способны улететь с последующим возвратом в точку взлёта) обычно ограничено прямой видимостью (100—200 м при ручном управлении) либо дальностью действия аппаратуры радиоуправления и видеолинка. При этом лучшие образцы подобной аппаратуры, использующие усилители мощности радиосигнала и систему направленных антенн, способны обеспечивать стабильные: радиоуправление и видеолинк на расстояния до 100 км. Таким образом, наибольшее ограничение на радиус действия мультикоптеров накладывает именно время полёта.
Эти ограничения приводят к тому, что мультикоптеры обычно используются как аппараты «ближнего радиуса действия»: для любительских полётов недалеко от себя, для фото-видеосъёмки близко расположенных объектов и так далее (для сравнения, беспилотные самолёты с аккумулятором аналогичной ёмкости могут улетать на 10—15 км при высоте полёта 1—2 км).
Поднимаемый полезный груз моделями мультикоптеров среднего размера и грузоподъёмности — от 500 г до 2—3 кг, что позволяет поднять в воздух небольшую фото- или видеокамеру (обычно экшн-камера в более дешёвых моделях, либо зеркальные камеры в профессиональных).
Существуют и достаточно крупные модели мультикоптеров, с количеством роторов порядка 6—8 (гекса- и октокоптеры), способные поднять в воздух груз массой до 20—30 кг. Для увеличения грузоподъёмности применяют соосное расположение несущих роторов, что в случае гексакоптера, например, даёт 12 моторов и 12 пропеллеров, расположенных попарно на 6 несущих лучах.
Скорость полёта мультикоптера может быть от нуля (неподвижное висение в точке) до 100—110 км/ч.
Существуют также трёх- и пятивинтовые вертолёты (три- и пентакоптеры). Один из моторов там располагается на нанизанной на ось подвижной платформе, угол поворота которой изменяется сервоприводом — так и осуществляется поворот аппарата вокруг своей оси. Отдельно стоит отметить экспериментальные аппараты: бикоптеры, квадрокоптеры с изменяемым шагом пропеллеров, квадрокоптеры с двигателями на импеллерах, однако они не получили какого-либо распространения.
Большое количество энтузиастов занимается самостоятельной сборкой коптеров.
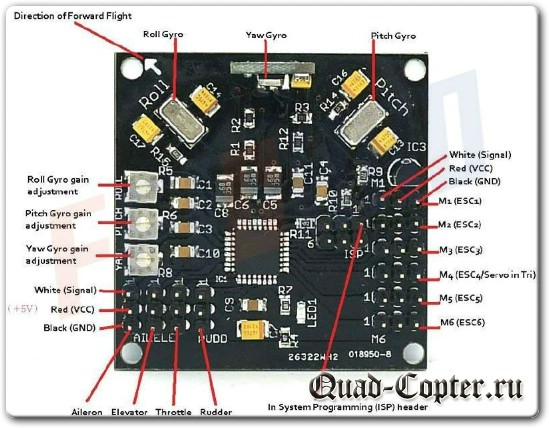
Часто для этих целей они используются широко известный недорогой полётный контроллер KK Multicopter, который имеет несмотря на свою низкую цену, достаточно широкие возможности и позволяет управлять системой, содержащий до 6 роторов включительно.
Источник картинки: www.quad-copter.ru
Следует упомянуть, что большая часть современных мультироторных систем представляет собой электрические машины, где тяговыми двигателями выступают электродвигатели, а в качестве источника энергии для них используются, в основном, литий-полимерные аккумуляторные батареи.
Исходя из всего вышесказанного, проистекает основная проблема мультироторных электрических систем: малое время работы (ввиду гораздо меньшего соотношения ёмкости аккумуляторных батарей к их весу, то есть энергоёмкости, по сравнению с любыми топливными системами) и невозможность подзарядки аккумуляторов в полевых условиях, ввиду отсутствия такой возможности.
Кроме того, грузоподъёмность мультироторных систем оставляет желать лучшего. Они вполне годятся для перевозки небольших грузов, однако стоимость системы, которая сможет стать полноценным средством передвижения или перевозки пассажиров, будет достаточно внушительной. Справедливости ради, однако, следует отметить, что в последнее время начинают практически реализовываться идеи некоего летающего городского такси, которое как раз будет построено на основе мультироторной электрической системы.
Однако, как уже было сказано ранее, мультироторные системы появились не вчера, изначально они представляли собой исключительно системы на двигателях внутреннего сгорания.
И не так давно, в середине 2023-х годов появилось достаточно интересная система, которая «возвращалась к истокам» и представляла собой квадрокоптер бензинового типа — Nitro Stingray.
В отличие от своих электрических собратьев, эта система в своей основе имела в качестве силовой установки двигатель внутреннего сгорания, от которого крутящий момент передавался на все четыре несущих ротора:
Этот квадрокоптер отличался тем, что он имел один центральный двигатель, а присущая мультикоптерам подвижность,- обеспечивалась четырьмя винтами, с изменяемым шагом:
Ввиду высокой энергоёмкости сжигаемого топлива, этот квадрокоптер имел относительно небольшой вес, если сравнивать его с электрическими собратьями, высокую удельную грузоподъёмность, а также подвижность, о чём было сказано ранее.
В это же десятилетие отметились несколько известных проектов, которые пытались решить проблему недостаточной грузоподъёмности электрических устройств таким же путем, — использованием центрального двигателя и передачи крутящего момента, в то время как управление осуществлялось регулировкой шага винтов.
Одним из таких проектов является проект Incredible HLQ (Heavy Lift Quadcopter), который даже запускал свою кампанию на kickstarter com.
Вот что говорили о нём его создатели:
«Мы — группа студентов-механиков, работающих над нашим главным проектом в Государственном университете Сан-Хосе в Сан-Хосе, Калифорния. В состав группы входят 4 участника: Ник Коновер, Крис Фулмер, Карлос Герреро и Габриэль Теллез. Каждый из нас обладает особым набором навыков и специализируется в 2 различных дисциплинах: мехатроника и конструирование.
Мы проектируем и строим квадрокоптер с большой грузоподъёмностью (HLQ), который мы называем Incredible HLQ (звучит как «Халк»). Как и супергерой, HLQ сможет поднимать и транспортировать огромное количество веса для своего размера и стоимости. HLQ сможет автономно извлекать и доставлять 50 фунтов (~22,7 кг) полезной нагрузки.
Чтобы достичь цели в 50 фунтов, HLQ будет использовать трансмиссию, приводимую в действие двумя бензиновыми двухтактными двигателями мощностью около 12,5 л.с. каждый. Подъём будет осуществляться с помощью четырёх головок несущего винта коммерческого радиоуправляемого вертолёта с четырьмя лопастями диаметром 435 мм. Выбор этих лопастей был основан на реальных испытаниях подъёмной силы на нашем испытательном стенде, которые показаны в видео. Управление достигается за счёт использования управления переменным шагом винтов для изменения подъёмной силы каждого ротора.
Управление полётом будет использовать модуль DIYDrone Ardupilot APM2.5 . Ardupilot — это плата управления на базе Arduino с открытым исходным кодом для БПЛА. Он широко используется для многих летательных аппаратов с неподвижным крылом, вертолётов и многороторных летательных аппаратов и имеет подтверждённый послужной список.
Кроме того, мы будем использовать систему компьютерного зрения для идентификации и отслеживания полезной нагрузки с помощью библиотеки OpenCV на Roboard RB-110. RB-110 — это полноценный компьютер на одной плате. Он имеет 486-совместимый процессор с тактовой частотой 1 ГГц и может работать под Windows, Linux или Dos.
HLQ — дорогостоящий проект для большинства старших инженерных проектов в SJSU (Государственный университет Сан-Хосе). Затраты выходят за рамки того, что мы, студенты, можем себе позволить, и поэтому ваша поддержка имеет решающее значение для нашего успеха».
У проекта есть свой канал на YouTube, где они публикуют последние новости о разработках.
Несмотря на большое количество затраченного времени, в данный момент проект всё также находится в стадии разработки, последнее видео о новостях проекта вышло в мае 2020 года:
Ещё одним достаточно известным проектом является Goliath Mkll.
Проект стартовал примерно в то же время, что и первый, также в 2023 году и имеет свой канал на YouTube, но так же как и первый проект, — до сих пор находится в стадии разработки:
Достаточно долгое время идея бензиновых грузоподъёмных мультироторных систем пребывала в запустении, в течение всего десятилетия 2023-х. По крайней мере, не было ничего особо заметного, что бы громко заявило о себе в блогосфере или интернете в целом.
Однако, в последние 3-4 года, ситуация похоже сдвинулась с мёртвой точки, — разработчики похоже учли сложность создания системы с изменяемым шагом винтов, и пошли другим путём: один за другим стали появляться проекты, которые сочетают в себе преимущества двух подходов,- электрического и бензинового.
Как правило, эти проекты построены приблизительно по одной и той же схеме: классическая мультироторная система, где несущие роторы базируются на основе электрических двигателей, в то время как источником энергии для питания системы являются не аккумуляторы, а используется портативная бортовая электростанция внутреннего сгорания — для выработки электроэнергии.
Такого типа дроны позиционируются как средства для опыления полей от вредителей. Ввиду своей грузоподъёмности и большого времени работы, они могут брать на борт большой бак с жидкими инсектицидами и работать долгие часы, проходя большую площадь.
Хотя, кое-кто развивает и альтернативные технологии. Как, например, проект ниже, о котором, к сожалению, ничего не известно, кроме технических характеристик, показанных в видео. Мультикоптерная система, предположительно, имеет синхронизирующие валы между парами отдельных двигателей, для выравнивания их скоростей, проходящие внутри труб — каркаса. А управление осуществляется наклоном каждого конкретного двигателя:
В качестве заключения:
Некоторое время назад, вышло видео, где сноубордист, прицепленный к квадрокоптеру, катается на фоне заснеженных ландшафтов:
Неожиданный подход, продемонстрированный в видео, произвёл впечатление на многих и широко разошёлся по блогосфере. Однако любой, более-менее близко знакомый с технической стороной «коптеростроения», понимает, что построение подобного коптера, — обойдётся в круглую сумму!
Но благодаря продемонстрированному строителями сельскохозяйственных коптеров подходу, данная затея уже не кажется такой безумной!
Предположим некий мультикоптер, который может поднимать человека, построенный по электрической схеме, и питающийся от бортовой электростанции. Ввиду мультироторной схемы, такой коптер будет обладать высокой подвижностью, в то же время, обладая высокой грузоподъёмностью, что позволит использовать его для такого интересного применения как дрон-бординг (катание за дроном, на прицепе)! Или скажем, в качестве манёвренного мощного дрона, для доставки грузов.
Для снижения шума от работы двигателя бортовой электростанции, дрон может лететь на большой высоте, поэтому это не будет проблемой.
Стартап? Why not…

Бортовой компьютер и сенсоры
Выбор полетных контроллеров для коптеров очень велик — начиная от простого и дешевого KapteinKUK и нескольких open source проектов под Arduino-совместимые контроллеры до дорогого коммерческого DJI Wookong. Если ты настоящий хакер, то закрытые контроллеры тебя не должны сильно интересовать, в то время как открытые проекты, да еще и основанные на популярной ардуинке, привлекут многих программистов. О возможностях любого полетного контроллера можно судить по используемым в нем датчикам:
• гироскоп позволяет удерживать коптер под определенным углом и стоит во всех контроллерах; • акселерометр помогает определить положение коптера относительно земли и выравнивает его параллельно горизонту (комфортный полет); • барометр дает возможность удерживать аппарат на определенной высоте.
На показания этого датчика очень сильно влияют потоки воздуха от пропеллеров, поэтому стоит прятать его под кусок поролона или губки; • компас и GPS вместе добавляют такие функции, как удержание курса, удержание позиции, возврат на точку старта и выполнение маршрутных заданий (автономный полет).
К установке компаса стоит подойти внимательно, так как на его показания сильно влияют расположенные рядом металлические объекты или силовые провода, из-за чего «мозги» не смогут определить верное направление движения; • сонар или УЗ-дальномер используется для более точного удержания высоты и автономной посадки; • оптический сенсор от мышки используется для удержания позиции на малых высотах; • датчики тока определяют оставшийся заряд аккумулятора и могут активировать функции возврата на точку старта или приземление.
Сейчас существует три основных открытых проекта: MultiWii, ArduCopter и его портированная версия MegaPirateNG. MultiWii самый простой из них, для запуска требует Arduino с процессором 328p, 32u4 или 1280/2560 и хотя бы одним датчиком-гироскопом. ArduCopter — проект, напичканный всевозможным функционалом от простого висения до выполнения сложных маршрутных заданий, но требует особого железа, основанного на двух чипах ATmega.
MegaPirateNG — это клон ArduCopter, который способен запускаться на обычной ардуине с чипом 2560 и минимальным набором датчиков из гироскопа, акселерометра, барометра и компаса. Поддерживает все те же возможности, что и оригинал, но всегда догоняет в развитии.

канальный пульт
С железом для открытых проектов аналогичная ситуация, как и с рамами для коптера, то есть ты можешь купить готовый контроллер или собрать его самостоятельно с нуля или на основе Arduino. Перед покупкой стоит всегда обращать внимание на используемые в плате датчики, так как развитие технологий не стоит на месте, а старье китайцам как-то надо распродать, к тому же не все сенсоры могут поддерживаться открытыми прошивками.
Наконец, стоит упомянуть еще один компьютер — PX4, отличающийся от клонов Arduino тем, что у него есть UNIX-подобная операционная система реального времени, с шеллом, процессами и всеми делами. Но надо предупредить, что PX4 — платформа новая и довольно сырая. Сразу после сборки не полетит.
Настройка полетных параметров, как и программы настройки, очень индивидуальна для каждого проекта, а теория по ней могла бы занять еще одну статью, поэтому вкратце: почти все прошивки для мультикоптеров основаны на PID-регуляторе, и основной параметр, требующий вмешательства, — пропорциональная составляющая, обозначаемая как P или rateP.
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета. Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах. Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение. Настрой и заранее проверь функцию fail safe твоего полетного контроллера, которая поможет приземлиться или вернуть коптер на точку старта при потере сигнала с пульта.
Дрон — функции компаса и видеонаблюдения
Встроенная в систему дистанционного управления функция компаса обеспечивает дрону точные координаты местоположения в процессе полёта.
Калибровкой компаса устанавливается точка возврата «домой» — место, куда дрону необходимо возвращаться в случае потери сигнала управления. Часто функцию компаса называют «отказоустойчивой функцией».
Одним из важных предметов оснащения дрона является вид от первого лица (FPV — First Person View). Устройство видеокамеры смонтированной на беспилотном летательном аппарате и предназначенной для трансляции видео в реальном времени диспетчеру ДУ.
Таким образом, диспетчер управления дроном наблюдает картину полёта аналогично тому, как если бы находился непосредственно на борту БПЛА и рассматривал вид Земли сверху — от фактического положения кресла пилота.

Функция и оснащение FPV позволяет беспилотным летательным аппаратам совершать перелёты на значительных высотах и на дальние расстояния, ограниченные только зарядом батареи питания. Также «First Person View» обеспечивает безопасность полётов среди препятствий.
Конструкции современных дронов имеют широкодиапазонный беспроводной передатчик FPV, который устанавливается в комплекте с антеннами.
В зависимости от конфигурации, приемником видеосигналов может выступать не только пульт дистанционного управления, но также компьютер, планшет, смартфон.
Последние разработки дронов, например, «DJI Mavic» и «Phantom 4 Pro», обеспечивают передачу видео в реальном времени на расстоянии до 7 км. Системы «Inspire 2» и «Phantom 4 Pro» используют новейшую систему передачи видеосигнала «DJI Lightbridge 2».
Дроны подобные «DJI Mavic Pro» характерны интеграцией контроллеров с интеллектуальными алгоритмами установки нового стандарта беспроводной передачи изображений.
Эта технология даёт высокий уровень разрешения путём снижения латентности и увеличения максимального диапазона частот.
Моторы и пропеллеры
Из-за вращения моторов в разные стороны приходится использовать разнонаправленные пропеллеры: прямого вращения (против часовой) и обратного вращения (по часовой). Обычно используются двухлопастные пропеллеры, их легче балансировать и найти магазинах, в то время как трехлопастные дадут больше тяги при меньшем диаметре винта, но доставят много головной боли при балансировке.
Плохой (дешевый и неотбалансированный) пропеллер может развалиться в полете или вызвать сильные вибрации, которые передадутся на датчики полетного контроллера. Это приведет к серьезным проблемам со стабилизацией и вызовет сильное смазывание и «желе» на видео, если ты снимаешь что-то с коптера или летаешь с видом от первого лица.

он же ESC
У любого пропеллера есть два основных параметра: диаметр и шаг. Их обозначают по-разному: 10 × 4.5, 10 × 45 или просто 1045. Это означает, что диаметр пропеллера 10 дюймов, а его шаг 4,5 дюйма. Чем длиннее пропеллер и больше шаг, тем большую тягу он сможет создавать, но при этом повысится нагрузка на мотор и увеличится потребление тока, в результате он может сильно перегреться и электроника выйдет из строя.
Поэтому винты подбираются под мотор. Ну или мотор под винты, тут как посмотреть. Обычно на сайтах продавцов моторов можно встретить информацию о рекомендуемых пропеллерах и аккумуляторах для выбранного мотора, а также тесты создаваемой тяги и эффективности.
Также чем больше винт, тем больше его инерция. Если нужна маневренность, лучше выбрать винты с большим шагом или трехлопастные. Они при том же размере создают тягу в 1,2–1,5 раза больше. Понятно, что винты и скорость их вращения нужно подбирать так, чтобы они смогли создать тягу большую, чем вес аппарата.

И наконец, бесколлекторные моторы. У моторов есть ключевой параметр — kV. Это количество оборотов в минуту, которые сделает мотор, на поданный вольт напряжения. Это не мощность мотора, это его, скажем так, «передаточное число». Чем меньше kV, тем меньше оборотов, но выше крутящий момент.
Чем больше kV при той же мощности, тем больше оборотов и ниже момент. При выборе мотора ориентируются на то, что в штатном режиме он будет работать при мощности 50% от максимальной. Не стоит думать, что чем kV больше — тем лучше, для коптеров с типичной 3S-батареей рекомендуемое число находится в диапазоне от 700 до 1000 kV.
Питание и контроллеры питания
Капитан подсказывает: чем больше мощность мотора, тем больше батарейка ему нужна. Большая батарейка — это не только емкость (читай, время полета), но и максимальный ток, которая она отдает. Но чем больше батарейка, тем больше и ее вес, что вынуждает скорректировать наши прикидки относительно винтов и моторов.
На сегодняшний день все используют литий-полимерные батарейки (LiPo). Они легкие, емкие, с высоким током разрядки. Единственный минус — при отрицательных температурах работают плохо, но если их держать в кармане и подключать непосредственно перед полетом, то во время разряда они сами слегка разогреваются и не успевают замерзнуть. LiPo-элементы вырабатывают напряжение 3,7 В.
При выборе батареи стоит обращать внимание на три ее параметра: емкость, измеряемую в миллиампер-часах, максимальный ток разряда в емкостях аккумулятора (С) и число ячеек (S). Первые два параметра связаны между собой, и при их перемножении ты узнаешь, сколько тока сможет отдавать этот аккумулятор продолжительное время.
Например, твои моторы потребляют 10 А каждый и их четыре штуки, а батарея имеет параметры 2200 мА · ч 30/40C, таким образом, коптеру требуется 4 • 10 A = 40 A, а батарея может выдавать 2,2 A • 30 = 66 A или 2,2 А • 40 = 88 А в течение 5–10 секунд, что явно будет достаточно для питания аппарата.
Также эти коэффициенты напрямую влияют на вес аккумулятора. Внимание! Если тока будет не хватать, то в лучшем случае батарея надуется и выйдет из строя, а в худшем загорится или взорвется; это же может произойти при коротком замыкании, повреждении или неправильных условиях хранения и зарядки, поэтому используй специализированные зарядные устройства, аккумуляторы храни в специальных негорючих пакетах и летай с «пищалкой», которая предупредит о разрядке.
Число ячеек (S) указывает на количество LiPo-элементов в батарее, каждый элемент выдает 3,7 В, и, например, 3S-аккумулятор будет отдавать примерно 11,1 В. Стоит обращать внимание на этот параметр, так как от него зависят скорость оборотов моторов и тип используемых регуляторов.
Элементы батареи объединяют последовательно или параллельно. При последовательном включении увеличивается напряжение, при параллельном — емкость. Схему подключения элементов в батарее можно понять по ее маркировке. Например, 3S1P (или просто 3S) — это три последовательно подключенных элемента.
Однако моторы подключаются к батарее не напрямую, а через так называемые регуляторы скорости. Регуляторы скорости (они же «регули» или ESC) управляют скоростью вращения моторов, заставляя твой коптер балансировать на месте или лететь в нужном направлении.
Большинство регуляторов имеют встроенный стабилизатор тока на 5 В, от которого можно питать электронику (в частности, «мозг»), можно использовать отдельный стабилизатор тока (UBEC). Выбираются контроллеры скорости исходя из потребления мотором тока, а также возможности перепрошивки.
Обычные регули довольно медлительны в плане отклика на поступающий сигнал и имеют множество лишних настроек для коптеростроительства, поэтому их перепрошивают кастомными прошивками SimonK или BLHeli. Китайцы и тут подсуетились, и часто можно встретить регуляторы скорости с уже обновленной прошивкой.
Не забывай, что такие регули не следят за состоянием аккумулятора и могут разрядить его ниже 3,0 В на банку, что приведет к его порче. Но в то же время на обычных ESC стоит переключить тип используемого аккумулятора с LiPo на NiMH или отключить уменьшение оборотов при разрядке источника питания (согласно инструкции), чтобы под конец полета внезапно не отключился мотор и твой беспилотник не упал.
Моторы подключаются к регулятору скорости тремя проводами, последовательность не имеет значения, но если поменять любые два из трех проводов местами, то мотор будет вращаться в обратном направлении, что очень важно для коптеров.
Два силовых провода, идущих от регулятора, надо подключить к батарейке. НЕ ПЕРЕПУТАЙ ПОЛЯРНОСТЬ! Вообще, для удобства регуляторы подключают не к самой батарейке, а к так называемому Power Distribution Module — модулю распределения энергии. Это, в общем-то, просто плата, на которой припаяны силовые провода регуляторов, распаяны разветвления для них и припаян силовой кабель, идущий к батарее.
Принцип действия дрона (бпла)
Типовой беспилотный летательный аппарат делается на основе облегчённых композитов, благодаря чему снижается вес и увеличивается маневренность конструкции. Эти свойства позволяют профессиональным дронам летать на значительных высотах.
Система беспилотного воздушного транспорта содержит две основы:
- Механику беспилотного летательного аппарата.
- Систему управления.
Носовая часть дрона – это, как правило, область корпуса, где установлены датчики навигационной системы. Остальная корпусная часть предназначена для размещения механики, электроники, электрооборудования.
Традиционно в конструкциях современных дронов задействованы системы GPS и ГЛОНАСС. Дроны способны летать под управлением ГНСС, но с тем же успехом поддерживают полёт в режиме без ГНСС.
Например, дроны «DJI» поддерживают полёт в режиме P-Mode (GPS и GLONASS) либо в режиме ATTI (Advanced Technology Transfer and Infusion), не предусмотренным в спутниковой навигации.

Когда дрон запускается пользователем, система машины выполняет поиск с последующим обнаружением спутников ГНСС. Высокопроизводительные системы ГНСС рассчитаны под технологию «Satellite Constellation».
В принципе, спутниковая группировка представляет собой набор аппаратов, работающих совместно, обеспечивая скоординированный охват и синхронизацию с целью качественного покрытия сигналом зоны обслуживания. Пропуск или охват — это период, в течение которого спутник видим над локальным горизонтом.
Радиолокационное оборудование дрона обнаруживает сигнал и транслирует результат на дисплее пульта дистанционного управления. В частности, показывает следующие установки:
- сигнал о достаточном числе спутников ГНСС и готовность к полету;
- отображение текущей позиции и местоположение дрона относительно пульта ДУ;
- запись отправной точки для последующего возвращения «домой»;
Большинство современных беспилотных летательных аппаратов поддерживают три способа возвращения «домой»:
- Инициировано возвращение «домой» кнопкой пульта ДУ.
- Низкий уровень заряда батареи питания дрона.
- Потеря связи между БПЛА и пультом ДУ.
Во всех трёх случаях автоматически задействуется функция «Mavic Air RTH», благодаря которой дрон эффективно обходит препятствия, встречающиеся на пути возвращения «домой».
Средства управления коптером
Когда уже понятно, как такая штука, как квадрокоптер, устроена и летает, необходимо остановиться на операторе. Ведь летающей машинкой нужно управлять. И желательно это делать комфортно, удобно и точно. Сегодня оператору предлагается несколько вариантов.
- Пульт управления, работающий по радиоканалу. Такое устройство не предусматривает обратной связи с дроном. С его помощью регулируют высоту и повороты в полете. Для этого на пульте установлены два отдельных джойстика. Один предназначен для уменьшения и увеличения высоты, другой — для плавного управления поворотами. На пульте также размещаются несколько функциональных кнопок. Например, зависание, автоматическая посадка, разворот. Главное достоинство радиопульта в большой дальности работы, а недостаток – сигнал можно перехватить или заглушить.

- Смартфон. Управлять дроном с мобильного телефона можно только в пределах действия WiFi трансмиттера. Для обычных смартфонов дальность составляет до 100 метров без преград на пути сигнала. Если в области полета есть устойчивый прием беспроводной сети глобальных провайдеров интернета, дальность управляемого полета дрона может быть неограниченной. Программы управления со смартфона могут также получать видеосигнал с камеры квадрокоптера.

Важно! Для дронов специального назначения создаются собственные программные комплексы. Они предусматривают максимальную обратную связь. Можно не только составить график полета и описать выполнение задач, но и получать данные в реальном времени об их исполнении. Конечно, такие программные комплексы отображают картинку с камеры коптера.
Сегодня в розничной продаже легко купить дрон любого класса. Это может быть недорогая игрушка размером с ладонь для развлечений в помещении. И даже такой маленький квадрокоптер сегодня оснащается веб-камерой, общается со смартфоном и умеет зависать. Легко приобрести и дорогую, грузоподъемную и функциональную модель. Главное — правильно очертить круг ее задач и приготовиться к денежным тратам.
Теория полета
В теории полета (аэродинамике) принято выделять три угла (или три оси вращения), которые задают ориентацию и направление вектора движения летательного аппарата. Проще говоря, летательный аппарат куда-то «смотрит» и куда-то двигается. Причем двигаться он может не туда, куда «смотрит».
Три эти угла принято называть крен, тангаж и рыскание. Крен — это поворот аппарата вокруг его продольной оси (оси, которая проходит от носа до хвоста). Тангаж — это поворот вокруг его поперечной оси (клюет носом, задирает хвост). Рыскание — поворот вокруг вертикальной оси, больше всего похожий на поворот в «наземном» понимании.

В классической схеме вертолета основной винт при помощи автомата перекоса лопастей управляет креном и тангажем. Так как основной винт обладает ненулевым сопротивлением воздуха, у вертолета возникает вращающий момент, направленный в сторону, противоположную вращению винта, и, чтобы его скомпенсировать, у вертолета есть хвостовой винт.
Изменяя производительность хвостового винта (оборотами или шагом), классический вертолет управляет своим рысканием. В нашем же случае все сложнее. У нас есть четыре винта, два из них вращаются по часовой стрелке, два — против часовой. В большинстве конфигураций используются винты с неизменяемым шагом и управлять можно только их оборотами.
Если мы увеличим обороты одного винта, вращающегося по часовой стрелке, и уменьшим обороты другого винта, вращающегося по часовой стрелке, то мы сохраним общий момент вращения и рыскание по-прежнему будет нулевым, но крен или тангаж (в зависимости от того, где мы сделаем ему «нос») изменятся.
А если мы увеличим обороты на обоих винтах, вращающихся по часовой стрелке, а на винтах, вращающихся против часовой стрелки, уменьшим (чтобы сохранить общую подъемную силу), то возникнет вращающий момент, который изменит угол рыскания. Понятное дело, что все это будем делать не мы сами, а бортовой компьютер, который будет принимать сигнал с ручек управления, добавлять поправки с акселерометра и гироскопа и крутить винтами, как ему надо.
Для того чтобы спроектировать коптер, необходимо найти баланс между весом, временем полета, мощностью двигателей и другими характеристиками. Все это зависит от конкретных задач. Все хотят, чтобы коптер летал выше, быстрее и дольше, но в среднем время полета составляет от 10 до 20 минут в зависимости от емкости аккумулятора и общего полетного веса.
Стоит запомнить, что все характеристики связаны между собой и, к примеру, увеличение емкости аккумулятора приведет к увеличению веса и, как следствие, к уменьшению времени полета. Чтобы узнать, сколько примерно твоя конструкция будет висеть в воздухе и сможет ли вообще оторваться от земли, существует хороший онлайн-калькулятор ecalc.ch.
Но прежде чем вбивать в него данные, нужно сформулировать требования к будущему аппарату. Будешь ли ты устанавливать на аппарат камеру или другую технику? Насколько быстрым должен быть аппарат? Как далеко тебе нужно летать? Давай посмотрим на характеристики различных компонентов.

Умная начинка
Как гласит распространенное мнение в среде специалистов по аэродинамике, заставить летать сегодня можно даже кирпич. И квадрокоптер точно соответствует данному утверждению. Модель полностью управляется электроникой. Без нее добиться предсказуемого поведения летающей конструкции в воздухе было бы невозможно.
Главную роль в работе электронной системы управления квадрокоптером играет гироскоп. Именно этот датчик определяет крен в воздухе. На основании его показаний регулируется работа двигателей для стабилизации коптера в полете. Современные гироскопы способны определить изменение позиции конструкции в 6 степенях свободы.
Немалую роль играют и другие датчики системы. Именно они обеспечивают удобство управления летающей машиной и полезный функционал.
- Акселерометр. При помощи контроля ускорения дрон отслеживает свое смещение. Это дает возможность машине зависать в заданной оператором точке, поддерживая высоту. Дорогие модели способны отслеживать смещение ветром, возвращаясь на исходную позицию.
- Барометр. Очень полезный датчик для устройств с хорошей высотой подъема и автономностью. Оператору достаточно задать высоту полета (минимум или максимум) или зависания.
- Сонар. Пара из ультразвукового излучателя и приемника, устанавливаемая в дорогих моделях, значительно снижает аварийность. Дрон может самостоятельно контролировать процесс автоматизированной посадки, обходить препятствия, останавливаться перед стенами. Сонар может работать в паре с акселерометром, помогать соблюдать точную высоту зависания.
- GPS модуль. Присутствует в моделях специального назначения или дорогих развлекательных устройствах. По сигналам этого датчика дрон определяет свое местоположение. Оператор может задать траекторию полета, формировать модель патрулирования и многое другое.
- Камера. Сегодня популярность такого оснащения непрерывно растет. Современные камеры при малом энергопотреблении могут предложить хорошее качество картинки. В зависимости от стоимости коптера, предлагается разный функционал. Камера дрона может смотреть только вперед или оснащаться поворотным и фокусирующим механизмом.
Все данные, поступающие с датчиков, обрабатываются центральным процессором. Большинство солидных производителей коптеров создают собственные решения. В дешевых дронах устанавливаются простые чипы, вся программа в которые записывается без возможности изменения.
Дорогие модели строятся с использованием флеш памяти. Владелец в некоторой степени может программировать коптер, задавая модели поведения, схемы движения и многое другое.
