

- Основные преимущества
- True hil-симуляция
- Беспилотный комплекс:
- Возможности бпла
- Вошли во вкус
- Гибридные бпла
- Классификация бпла
- Литература
- Масштабирование
- На поверхность кузова спецавтомобиля наносится цветографическая схема, согласно требованиям для автотранспорта мчс или другая разметка в зависимости от специфики организации.
- Преимущества бпла
- При чём здесь uavcan?
- Применение бпла
- Резервирование
- Состав оборудования:
- Сферы применения
- Технические особенности и оснащение
- Устройство бпла
- Часть 1. обзор технических средств
- Вывод
Основные преимущества
Передвижной пункт управления БПЛА значительно повышает эффективность любой миссии, благодаря целому ряду преимуществ:
- Позволяет быстро доставить персонал и все необходимые технические средства к местам проведения воздушной разведки.
- С его помощью удается более точно определить координаты зон чрезвычайных ситуаций, пострадавших объектов, очагов природных и техногенных катастроф и других происшествий.
- За счет полноприводной колесной формулы автомобиля, передвижной пункт можно доставить в самые труднодоступные места.
- Специальное оснащение автомобиля обеспечивает его полную автономность и бесперебойную работу в любых условиях.
- Освещение позволит взлетать в темное время суток.
True hil-симуляция
Сейчас активно развивается тема работы БПЛА в городской среде — Urban Air Mobility (UAM). Для реализации задач UAM нужно больше опираться на такие сенсоры, как камеры и лидары. Тут возникает необходимость разработки и отладки систем интеллектуального управления, а также повышение их надёжности.

Innopolis Simulator
Для нашего VTOL-самолета используем Innopolis Simulator в связке с Gazebo для фотореалистичной симуляции, тестирования управления и обработки сенсорных данных — лидаров и камер.
Сейчас работаем над своим модулем симуляции динамики вместо Gazebo с более точной аэродинамикой, а также над другой фишкой — true HIL симуляцией (от hardware in the loop, или программно-аппаратное моделирование, ПАМ).
В нашем решении все данные поступают от датчиков, а управления на моторы и сервы отправляются по шине UAVCAN. Почему бы не сделать модуль симуляции этих датчиков на уровне той же шины? Просто вместо устройств к контроллеру мы подключаем компьютер с симулятором.
Сейчас HIL-симуляция в PX4 делается посредством специальных HIL_* сообщений MAVLINK (протокол телеметрии, работает по последовательному порту либо UDP/TCP), которые имитируют датчики и исполнительные механизмы.
Диаграмма работы PX4 в режиме HITL. Источник
Симуляция, как она реализована сейчас в PX4, — это отдельный режим работы полётного контроллера, отличающийся от «боевой» полётной конфигурации. Мы имитируем непосредственно UAVCAN сообщения, в идеале автопилот может даже не знать, что работает в симулируемом окружении.
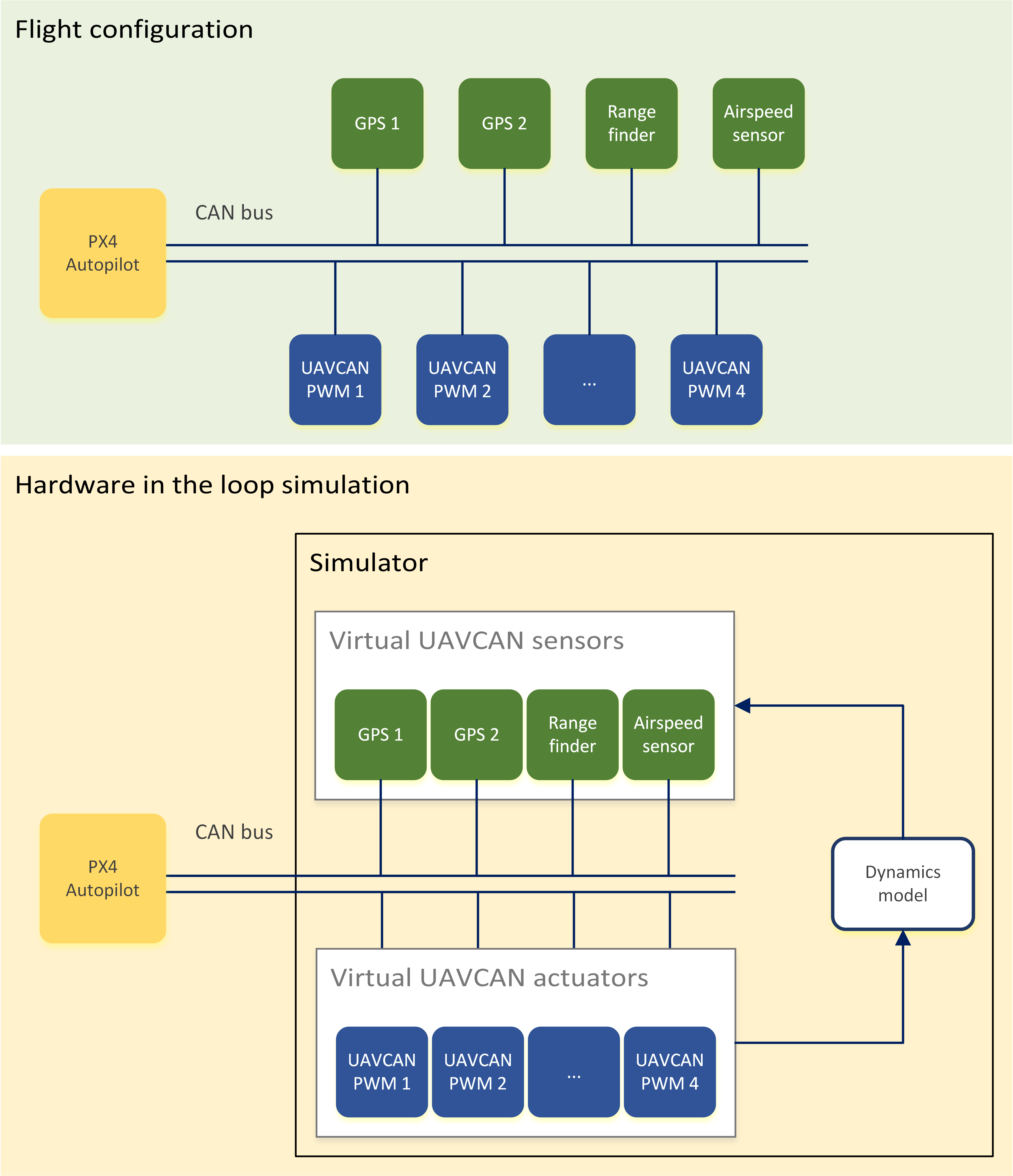
Предлагаемая схема работы PX4 в режиме HITL с использованием UAVCAN
Такое решение повышает достоверность результатов отладки на симуляторе, поэтому можно смелее переходить к лётным тестам.

Авиационный HIL симулятор. Источник
Подобный подход, когда устройства имитируются на уровне интерфейсов, используется и в большой авиации, но с UAVCAN мы делаем это доступнее и проще.
Беспилотный комплекс:
- Квадрокоптер DJI Matrice 300 RTK
- Камера DJI H20T
- Камера DJI Zenmuse Z30
- Газоанализатор Sniffer4D
- Зарядочная станция
- Громкоговоритель
- Прожектор
- Дополнительно рекомендуется включить в состав комплекса MicaSense RedEdge MX*
Возможности бпла
Согласно требованиям документа «Основные положения по аэрофотосъемке, выполняемой для создания и обновления топографических карт и планов» ГКИНП-09-32-80 носитель аэрофотосъемочной аппаратуры должен предельно точно следовать проектному положению маршрутов аэрофотосъемки, выдерживать заданный эшелон (высоту фотографирования), обеспечивать требования по соблюдению предельных отклонений по углам ориентирования фотокамеры — наклон, крен, тангаж.
Выше указывалась аппаратура, интегрированная в автопилот: это микробарометр, датчик воздушной скорости, инерциальная система, навигационная спутниковая аппаратура. По проведен-ным испытаниям (в частности, БПЛА Geoscan101) были установлены следующие отклонения реальных параметров съемки от заданных:
• уклонения БПЛА от оси маршрута — в диапазоне 5–10 метров;
• уклонения высот фотографирования — в диапазоне 5–10 метров;
• колебание высот фотографирования смежных снимков — не более 2 метров.
Возникающие в полете «елочки» (развороты снимков в горизонтальной плоскости) обрабатываются автоматизированной системой фотограмметрической обработки без заметных негативных последствий.
Фотоаппаратура, устанавливаемая на БПЛА, позволяет получить цифровые изображения местности с разрешением лучше 3 сантиметров на один пиксель. Применение коротко-, средне-, и длиннофокусных фотообъективов определяется ха-рактером получаемых готовых мате-риалов: будь это модель рельефа или ортофотоплан. Все расчеты производятся так же, как и в «большой» аэрофотосъемке.
Применение двухчастотной ГЛО-НАСС/GPSспутниковой геодезической системы для определения координат центров снимков позволяет в процессе постобработки получить координаты центров фотографирования с точностью лучше 5 сантиметров, а применение метода PPP(PrecisePointPositioning) — позволяет определять координаты центров снимков без использования базовых станций или на значительном удалении от них.
Конечная обработка материалов аэрофотосъемки может служить объективным критерием оценки качества выполненной работы. Для иллюстрации можно рассмотреть данные об оценке точности фотограмметрической обработки материалов аэрофотосъемки с БПЛА, выполненной в ПО «PhotoScan» (производства фирмы Agisoſt, г. СанктПетербург) по контрольным точкам (табл. 2).
Номера точек | Ошибки по осям координат, м | Абс, м | Абс, пикс | Проекции | ||
ΔХ | ΔY | ΔZ | ΔD | ΔD’ | ||
703 | -0,017 | -0,075 | 0,069 | 0,103 | 0,606 | 5 |
727 | 0,058 | 0,065 | 0,066 | 0,123 | 0,789 | 6 |
762 | -0,060 | 0,020 | -0,045 | 0,078 | 0,994 | 5 |
773 | -0,021 | 0,100 | -0,246 | 0,267 | 1,192 | 7 |
827 | 0,041 | -0,111 | 0,138 | 0,181 | 1,346 | 8 |
(ΔD)2= ΔХ2 ΔY2 ΔZ2 | ||||||
Вошли во вкус
Дальше мы поняли, что можем вместо десятка проводов использовать шину UAVCAN для взаимодействия не только с исполнительными механизмами, но и с большинством внешних устройств. Это ещё и хорошо сказывается на виброизоляции контроллера, установленного на специальной платформе. В итоге мы разработали ряд девайсов для собственного применения, но сейчас видим, что они интересны другим:
Гибридные бпла
Самолёт вертикального взлёта и посадки (VTOL) — это гибрид коптера и самолёта, который может работать дольше коптера за счёт аэродинамической подъёмной силы крыла и при этом не требует взлётно-посадочной полосы либо пускового устройства и парашюта, как обычные самолётные беспилотники.
Сейчас разработка таких устройств — популярное и многообещающее направление. Такой аппарат можно использовать для доставки, картографии, мониторинга и других целей. По тому же принципу конструкции устроены большинство проектов летающего такси, например:
 Самолёт вертикального взлёта и посадки Университета Иннополис
Самолёт вертикального взлёта и посадки Университета Иннополис
Мы разработали три модели небольших беспилотных аппаратов с разным размахом крыла, грузоподъёмностью и источниками питания — полностью электрические и с двигателями внутреннего сгорания. По конструкциям летательных аппаратов сотрудничаем с Казанским авиационным институтом и авиационными предприятиями Казани, а фокус наших работ — электроника, алгоритмы и автоматическое управление.
Классификация бпла
Общеизвестно, что аэрофотосъемка, как вид дистанционного зондирования Земли (ДЗЗ), — это наиболее производительный метод сбора пространственной информации, основа для создания топографических планов и карт, создания трехмерных моделей рельефа и местности.
Беспилотные летательные аппараты, как и пилотируемые, бывают самолетного, а также вертолетного типа (вертолеты и мультикоптеры — летательные аппараты с четырьмя и более роторами с несущими винтами). В настоящее время в России не существует общепринятой классификации БПЛА самолетного типа. Missiles.
Литература
1. Павлушенко М., Евстафьев Г., Макаренко И. БПЛА: история, применение, угроза распространения и перспективы развития. М., «Права человека», 2005.
2. Цепляева Т.П., Морозова О.В. Этапы развития беспилотных летательных аппаратов. М., «Открытые информационные и компьютерные интегрированные технологии», № 42, 2009.
Масштабирование
В будущем мы хотим делать большие аппараты взлётной массой больше 30 кг, хотя это и сложно сертифицировать. Масштабируемость архитектуры на базе UAVCAN позволяет строить амбициозные планы.
На поверхность кузова спецавтомобиля наносится цветографическая схема, согласно требованиям для автотранспорта мчс или другая разметка в зависимости от специфики организации.
Мобильный пункт управления дронами оснащен мачтой освещения, которая позволит осуществлять запуск дрона в темное время суток. На крышу установлена взлетная площадка со специальными огнями, которую можно использовать при осложнении ситуации и невозможности взлета (большое количество снега, бездорожье, поле) для этого на автомобиле закреплена лестница.
Преимущества бпла
Превосходством БПЛА перед пилотируемыми воздушными судами является, прежде всего, стоимость производства работ, а также значительное уменьшение количества регламентных операций. Само отсутствие человека на борту самолета значительно упрощает подготовительные мероприятия для проведения аэрофотосъемочных
работ.
Во-первых, не нужен аэродром, даже самый примитивный. Беспилотные летательные аппараты запускаются или с руки, или с помощью специального взлетного устройства — катапульты.
В-третьих, отсутствует или намного увеличен межрегламентный период эксплуатации БПЛА по сравнению с пилотируемым воздушным судном.
Данное обстоятельство имеет большое значение при эксплуатации аэрофотосъемочного комплекса в удаленных районах нашей страны. Как правило, полевой сезон аэрофотосъемочных работ короток, каждый погожий день необходимо использовать для производства съемки.
При чём здесь uavcan?
Те, кто занимаются коптерами, знают, что обычная структура системы управления выглядит примерно так:
Типовая схема БПЛА на базе автопилота PX4. Источник
Моторы управляются регуляторами оборотов (ESC), на которые посредством PWM (ШИМ) сигналов подаются уставки от автопилота. Датчики подключаются по куче разных интерфейсов — UART, I2C, SPI. Плюс телеметрия, пульт, питание — и получается такой «паук» из проводов. Но основная проблема не в этом.
Чем длиннее провода, то есть больше аппарат, тем эта схема сильнее подвержена наводкам. Нам об этом пришлось задумываться с самого начала, потому что у наших аппаратов размах крыльев 2 и 4 метра, и это не предел.
Раньше для проекта 40-метрового дирижабля мы работали с CAN (только протокол был на базе CANOpen). И решение использовать UAVCAN для нас было само собой разумеющимся: в PX4 уже есть его поддержка, даже никаких споров в команде по этому поводу не возникало.
Заменив PWM-связи на UAVCAN-связи, мы перестали беспокоиться о проблемах длинных проводов и наводок, а также значительно уменьшили количество подключений к автопилоту.
Было два варианта, как это сделать. Первый — использовать регуляторы моторов и сервоприводы с UAVCAN интерфейсом. Такие есть, например, у Zubax. Второй — сделать адаптеры UAVCAN, которые устанавливаются непосредственно возле ESC. Мы пошли по второму варианту, потому что выбор ESC с UAVCAN интерфейсом невелик.
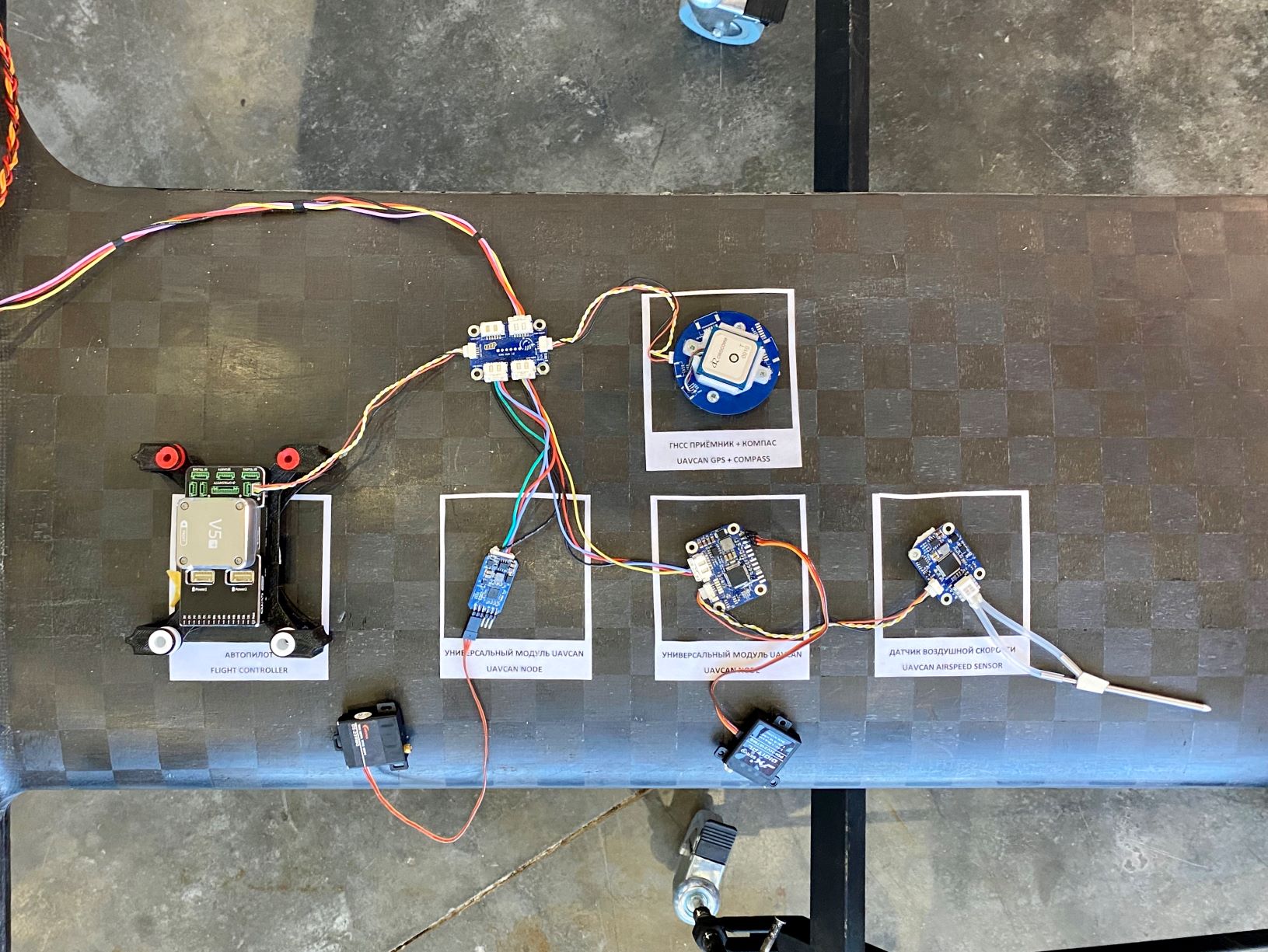
Наши устройства с интерфейсом UAVCAN
Применение бпла
В мире, а в последнее время и в России, беспилотные летательные аппараты применяются в геодезических изысканиях при строительстве, для составления кадастровых планов промышленных объектов, транспортной инфраструктуры, поселков, дачных массивов, в маркшейдерском деле для определения объемов горных выработок и отвалов, при учете движения сыпучих грузов в карьерах, портах, горнообогатительных комбинатах, для создания карт, планов и 3D-моделей городов и предприятий.
Беспилотники применяются при мониторинге линий электропередач
(определение зарастания, провисания проводов, деформации опор, повреждений изоляторов и проводов), трубопроводов (выявление врезок, незаконных построек, зарастания), дорог (выявление деформации насыпи, дефектов полотна), для мониторинга госграницы, особо охраняемых объектов, зон аэропортов (выявление изменений, выявление незаконных построек), акваторий портов и др.
Эти аппараты также применяются для обнаружения лесных пожаров, при ликвидации чрезвычайных ситуаций, отслеживании нарушителей ПДД, для проводки судов во льдах. Используют их и в потребительском секторе — для съемки спортивных соревнований, рекламных роликов, съемки для создания карт и 3D-моделей личных владений.
Резервирование
Важнейшая задача при реализации продукта на базе БПЛА — обеспечить надёжность. Мы уже начали работать над этим. Например, несколько наших GPS и датчиков воздушной скорости подключить и использовать параллельно уже получается. Но ещё многое предстоит.
Состав оборудования:
- Автомобиль цельнометаллический Ford Transit 4×4
- Кондиционер Telair
- Дизельный генератор мощностью 3 Кв.
- Инвертор 2000W
- Мачта освещения
- Телескопическая мачта для крепления антенн различного типа
- Метеостанция
- Рабочий ноутбук – 2 шт.
- МФУ (принтер, сканер, факс)
- Модем Wi-Fi
- Мониторы 22 дюйма – 2 шт.
- Выдвижная маркиза
- Стол разборный
- Дополнительный инструмент
Сферы применения
С использованием передвижного пункта управления БПЛА выполняют различные работы:
- Доставка персонала и оборудования к месту ЧП.
- Подъезд к объекту по пересеченной местности и по дороге с плохим покрытием.
- Качественное проведение аварийно-спасательных и поисковых работ на месте происшествия.
- Фото- и видеосъемка на месте аварии.
- Контроль над выполнением работ с оборудованного места руководителя.
- Сбор данных для принятия эффективных управленческих решений.
- Радиационный контроль и обследование конкретного объекта или масштабной территории.
- Контроль качества окружающей среды ( анализ воздуха )
- Мониторинг крупных промышленных объектов.
- Карбоновый мониторинг.
Технические особенности и оснащение
Передвижной пункт управления — это переоборудованный автомобиль грузопассажирский фургон Ford Transit с комплектом современного оборудования.
Для комфортной работы персонала внутри фургона выполнена отделка шумоизоляционными материалами и тонировка окон, установлены дополнительные источники света, предусмотрен автономный обогрев салона, установлен кондиционер в операторском отсеке.
В операторском отделении фургона обустроены рабочие места для операторов БПЛА, оснащенные мониторами. Управление дронами производится из этого отдела благодаря тому, что пульт управления подключен к антенне установленной на выдвижной мачте. Данное решение позволяет осуществлять полеты в комфортном месте несмотря на обстановку вокруг.
Также в этой части расположены дополнительные отсеки для хранения, МФУ, другое дополнительное оборудование, разнообразные офисные и бытовые принадлежности.
В грузовом отсеке расположены стеллажи с системой крепления для безопасной транспортировки кейсов комплекса БПЛА, различных дополнительных принадлежностей и инструментов. Установлен генератор и преобразователь напряжения 12-220В с разводкой по розеткам для подключения электрооборудования.
Устройство бпла
Две основные схемы компоновки БПЛА: классическая (по схеме «фюзеляж крылья хвост»), к которой относится, например БПЛА «Орлан-10», Mavinci SIRIUS (рис. 1) и др., и «летающее крыло», к которой относятся Geoscan101 (рис. 2), Gatewing X100, Trimble UX5 и др.
Основными частями беспилотного аэрофотосъемочного комплекса являются: корпус, двигатель, бортовая система управления (автопилот), наземная система управления (НСУ) и аэрофотосъемочное оборудование.
Корпус БПЛА изготавливают излегкого пластика (например, углепластика или кевлара), чтобы защитить дорогостоящую фотоаппаратуру и средства управления и навигации, а его крылья — из пластика или экструдированного пенополистирола (EPP). Этот материал легок, достаточно прочен и не ломается при ударе. Деформированную деталь из ЕРР зачастую можно восстановить подручными средствами.
Легкий БПЛА с посадкой на парашюте может выдержать несколько сотен полетов без ремонта, который, как правило, включает замену крыльев, элементов фюзеляжа и др. Производители стараются удешевить части корпуса, подверженные износу, чтобы расходы пользователя на поддержа-БПЛА в рабочем состоянии были минимальными.
Надо отметить, что наиболее дорогостоящие элементы аэрофотосъемочного комплекса, наземная система управления, авионика, программное обеспечение, — вообще не подвержены износу.
Силовая установка БПЛА можетбыть бензиновой или электрической. Причем, бензиновый двигатель обеспечит намного более продолжительный полет, так как в бензине, в расчете на килограмм, запасено в 10–15 раз больше энергии, чем мож-но сохранить в самом лучшем аккумуляторе.
Однако такая силовая установка сложна, менее надежна и требует значительного времени для подготовки БПЛА к старту. Кроме того, беспилотный летательный аппарат с бензиновым двигателем крайне сложно перевозить к месту работ на самолете. Наконец, он требует от оператора высокой квалификации.
Электрическая двигательная установка, напротив, очень нетребовательна к уровню квалификации обслу-живающего персонала. Современные аккумуляторные батареи могут обеспечить длительность непрерывного полета свыше четырех часов. Обслуживание электрического двигателя совсем несложно.
Преимущественно это только защита от влаги и грязи, а также проверка напряжения бортовой сети, что осуществляется с наземной системы управления. Зарядка аккумуляторов производится от бортовой сети сопровождающего автомобиля или от автономного электрогенератора. Бесколлекторный электрический двигатель БПЛА практически не изнашивается.
Автопилот —с инерциальной системой (рис. 3) — наиболее важный элемент управления БПЛА.
Автопилот весит всего 20–30 граммов. Но это очень сложное изделие. В автопилоте, кроме мощного процессора, установлено множество датчиков — трехосевые гироскоп и акселерометр (а иногда и магнитометр), ГЛО-НАСС/GPS-приемник, датчик давления, датчик воздушной скорости. С этими приборами беспилотный летательный аппарат сможет летать строго по заданному курсу.
Рис. 3. АвтопилотMicropilot[7]
В БПЛА имеется радиомодем, необходимый для загрузки полетного задания, передачи в наземную систему управления телеметрических данных о полете и текущем местоположении на участке работ.
Наземная система управления
(НСУ) —это планшетный компьютерили ноутбук, оснащенный модемом для связи с БПЛА. Важная часть НСУ — программное обеспечение для планирования полетного задания и отображения хода его выполнения.
Как правило, полетное задание составляется автоматически, по заданному контуру площадного объекта или узловым точкам линейного объекта. Кроме того, существует возможность проектирования полетных маршрутов, исходя из необходимой высоты полета и требуемого разрешения фотоснимков на местности.
Во время полета на картографической подложке монитора НСУ отображается положение БПЛА и контуры снимаемых фотографий. Оператор имеет возможность во время выполнения полета оперативно перенацелить БПЛА на другой район посадки и даже оперативно посадить беспилотник с «красной» кнопки наземной системы управления. По команде с НСУ могут быть запланированы и другие вспомогательные операции, например — выброс парашюта.
Кроме обеспечения навигации и обеспечения полета автопилот должен управлять фотоаппаратом, чтобы получать снимки с заданным межкадровым интервалом (как только БПЛА пролетит нужное расстояние от предыдущего центра фотографирования). Если заранее рассчитанный межкадровый интервал не выдерживается стабильно, приходится настраивать время срабатывания затвора с таким расчетом, чтобы даже при попутном ветре продольное перекрытие было достаточным.
Автопилот должен регистрировать координаты центров фотографирования геодезического спутникового приемника ГЛОНАСС/GPS, чтобы программа автоматической обработки снимков смогла построить модель быстро и привязать ее к местности. Требуемая точность определения координат центров фотографирования зависит от технического задания к выполнению аэрофотосъемочных работ.
Аэрофотосъемочное оборудование на БПЛА устанавливается в зависимости от его класса и цели использования.
На микро- и мини-БПЛА устанавливаются компактные цифровые фотокамеры, комплектуемые сменными объективами с постоянным фокусным расстоянием (без трансфокатора или zoom-устройства) весом 300–500 граммов. В качестве таких камер в настоящее время используются фотоаппараты SONY NEX-7
На легкие БПЛА малого радиуса действия устанавливаются зеркальные фотокамеры с большим размером светочувствительного элемента, например CanonEOS5D(размер сенсора 36×24 мм) , NikonD800 (матрица 36,8 МП (размер сенсора 35,9×24 мм)), Pentax645D(CCD-сенсор 44×33 мм, матрица 40 МП) и им подобные, весом 1,0–1,5 килограмма.
Рис. 4. Схема размещения аэроснимков (голубые прямоугольники с подписями номеров)
Часть 1. обзор технических средств
ИСТОРИЧЕСКАЯ СПРАВКА
Беспилотные летательные аппараты появились в связи с необходимостью эффективного решения военных задач — тактической разведки, доставки к месту назначения боевого оружия (бомб, торпед и др.), управления боевыми действиями и пр. И не случайно первым их применением считается доставка австрийскими войсками бомб к осажденной Венеции с помощью воздушных шаров в 1849 году [1].
Так, в 1898 году Никола Тесла разработал и продемонстрировал миниатюрное радиоуправляемое судно, а уже в 1910 году американский военный инженер Чарльз Кеттеринг предложил, построил и испытал несколько моделей беспилотных летательных аппаратов [2]. В 1933 году в Великобритании разработан первый БПЛА
многократного использования, а созданная на его основе радиоуправляемая мишень использовалась в королевском флоте Великобритании до 1943 года.
На несколько десятков лет опередили свое время исследования немецких ученых, давших миру в 1940-х годах реактивный двигатель и крылатую ракету «Фау-1» как первый применявшийся в реальных боевых действиях беспилотный летательный аппарат.
В СССР в 1930–1940 годы авиаконструктором Никитиным был разработан торпедоносец-планер типа «летающее крыло», а к началу 40-х был подготовлен проект беспилотной летающей торпеды с дальностью полета от 100 километров и выше, однако в реальные конструкции эти разработки не превратились.
После окончания Великой Отечественной войны интерес к БПЛА существенно возрос, а начиная с 1960-х годов отмечается их широкое внедрение для решения задач невоенного характера.
В целом историю БПЛА можно условно разделить на четыре временных этапа [3]:
1.1849 год–начало ХХ века — попытки и экспериментальные опыты по созданию БПЛА, формирование теоретических основ аэродинамики, теории полета и расчета самолета в работах ученых.
2.Начало ХХ века — 1945 год — разработка БПЛА военного назначения (самолетов-снарядов с небольшой дальностью и продолжительностью полета).
3.1945–1960 годы — период расширения классификации БПЛА по назначению и создание их преимущественно для разведывательных операций.
4.1960 годы — наши дни — расширение классификации и усовершенствование БПЛА, начало массового использования для решения задач невоенного характера.
Вывод
Очень здорово, что над вопросами лёгкости, надёжности и «риалтаймовости» протокола UAVCAN уже подумали за нас, как и то, что есть PX4, ROS и Linux, в конце концов. Нам было бы очень сложно делать наши коптеры, самолёты, системы управления и планировщики, если бы всего этого не было.
Стандартизация протоколов и программных средств даёт возможность разработчикам говорить на одном языке. Вместе с тем, важна не только стандартизация, но и доступность, что в высокой степени обеспечивает open-source подход. Это позволяет, стоя на плечах гигантов, быстрее переходить к своим задачам, а не строить сначала долго «инфраструктуру» для работы, что, надеюсь, мы показали на нашем примере в данной статье.

Пьём колд брю после успешных полётов


