

Failsafe
Режим сохранения, то есть, то, что будет делать квадрокоптер, если он потеряет связь с пультом управления.
Здесь есть 2 режима:
- Падение;
- Приземление;
- GPS спасение.
- Падение — если выбрать этот режим, то через секунду (настраивается в поле «Failsafe при низком значении газа, где стоит цифра 100) после потери сигнала, дрон отключит все двигатели и упадет.
- Приземление — при потере сигнала будет плавно приземляться, двигатели будут работать. Режим достаточно опасный, к тому же, нужно хорошо настроить обороты двигателей.
- GPS спасение — если вы установили на свой квадрокоптер GPS-модуль, то с его помощью можно настроить возврат квадрокоптера.
Если кратко, функция экстренная и созданная с целью вернуть управления квадрокоптером, а не его посадить, потому что нет дополнительных датчиков. Функция сработает, если вы улетите на расстояние не менее 50 метров (если не ошибаемся, то минимум можно установить 30 метров от точки взлета). Сажать дрон с помощью данного модуля не советуем, так как он ударит дрон о землю (нет других датчиков).
Вся задача модуля — в случае потери связи или, если вы засомневались в своих силах управления на дальнем расстоянии, активируете функцию GPS Rescue (либо она автоматически активируется), дрон поднимется на определенную высоту и полетит в ПРИМЕРНУЮ точку взлета. Главное, чтобы вы смогли перехватить управления на себя и не потерять/разбить дрон.
Обычно включают режим «Падение», так как с «Приземлением» непонятно где он будет приземляться с работающими винтами, а вдруг там будут люди?
Но если выбрали «Приземление», нужно настроить скорость вращения моторов, которые позволят плавно ему спускаться.
Блок «Failsafe переключатель» выполнит действие при активации тумблера, который присваивается функции на вкладке «Режимы». ПРи активации тумблера, выполнится сценарий Этапа 2.
Pid-настройки
Сложный раздел, в котором настройки производят далеко не все пилоты, за исключением очень увлеченных и профессионалов.
Углубляться в этой статье нет смысла, так как у нас есть несколько отдельных статей по этому разделу:
Больше нет sd-карты памяти
В F3 версии память была внешней посредством подключения SD-флешки к слоту, но в F4 решили убрать слот и интегрировать флеш память в саму плату, теперь у четверки встроенная память. С картами памяти в F3 были проблемы, часто происходили ошибки распознавания и записи данных, поэтому чтобы избавиться от этой проблемы, память просто интегрировали в плату. SD-карта у полетников нужна в качестве черного ящика (BlackBox).
Вкладка blackbox
Черный ящик нужно для того, чтобы записывать все данные полета — телеметрию. По мере того, как вы будете набираться опыта, журнал черного ящика будет вашим лучшим другом по настройке своего дрона. Blackbox по умолчанию включен. Данные будут писаться либо во встроенную флеш-память, либо на внешнюю SD-карту.
У всех современных полетных контроллеров есть своя память и это как минимум 16 мегабайт. Этого вполне хватит, чтобы записывать логи полета.
Другие незначительные изменения
ESC Telemetry Pads (контакты для телеметрии с регуляторов оборотов) — если у вас регуляторы марок KISS и BLHeli_32, то вы можете напрямую подключать их телеметрию к контроллеру, не придумывая иные способы подключения.
RX Voltage — (напряжение бортовой сети) в F3 нужно было припаивать провода отдельно, а в F4 для этого сделаны специальные выходные контакты.
Наличие Voltage Regulator / BEC (Battery Elimination Circuit) который преобразовывает ток с аккумулятора в напряжение 1.5А для питания внешних устройств на квадрокоптере. Теперь видео передатчик рекомендуется подключать к этому регулятору, либо к VBAT.
Командная строка (cli)
Через командную строку можно влиять на какую-либо информацию в прошивке, вносить изменения, а также выводить информацию о каком-либо параметре или компоненте. Список команд большой и выводится по команде «help». Все рассказывать здесь не будем, так как у нас опять есть отдельная статья по командной строке, если вам интересно, то ссылка ниже.
Конфигурация
На этой вкладке выполняются базовые настройки, такие как протокол связи полетного протокола с регуляторами оборотов, протокол связи приемника с полетным протоколом, расположение платы и многое другое.
Моторы
На этой вкладке проверяется работоспособность двигателей:
Перед любыми действиями, обязательно снимайте пропеллеры с двигателей!
Перед тем, как покрутить двигатели ползунками, переключите флажок «я понимаю всю опасность», чтобы активировать функционал. Теперь можете подвигать ползунки, моторы начнут крутиться: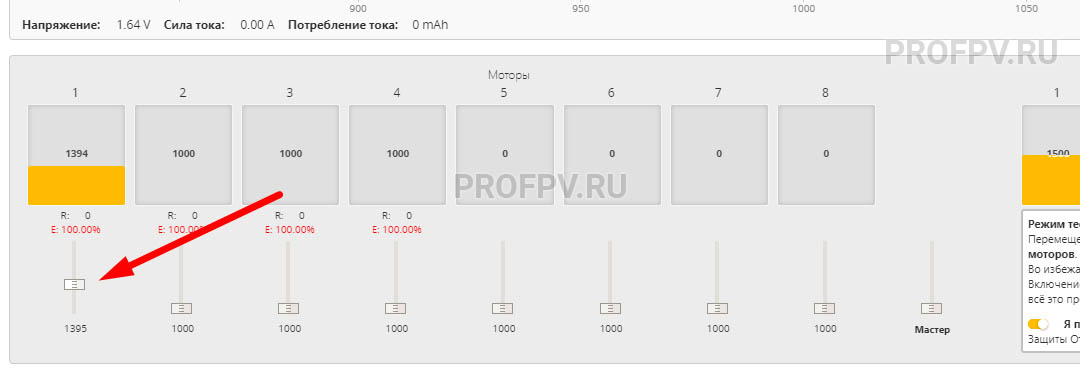 Чуть выше располагается график гироскопа, а также информация о том, сколько потребляют двигатели тока, а также силу и напряжение. Все это служит для проверки и настройки двигателей.
Чуть выше располагается график гироскопа, а также информация о том, сколько потребляют двигатели тока, а также силу и напряжение. Все это служит для проверки и настройки двигателей.
Обзор betaflight f4
На самом деле мне очень понравился обновленный контроллер, он может дать все что нужно пилоту в плане функций, которые настраиваются в Betaflight конфигураторе.
Стильный дизайн и хорошая пайка: все элементы качественно пропаяны, так как сама плата очень прочная, 6-ти слойная, такая сможет выдержать большие нагрузки и токи. При цене в 2000 рублей, этот контроллер дает возможности контроллеров за 3-4 тысячи.
Единственным недостатком я считаю то, что регуляторы подключаются снизу контроллера и могут возникнуть проблемы с подступами к этой части контроллера, особенно это будет трудно сделать, если контроллер уже будет установлен на раму. Отмерьте провода до регуляторов, припаяйте и потом уже устанавливайте полетник на раму.
Еще один недостаток, но он просто визуальный — остатки от перемычек плат, т.е. заготовку из текстолита разрезают между собой и остаются вот такие заусенцы:
Эта реликвия все еще устанавливается на платах, в том числе и на нашей новой F4. Это индуктор. К тому же, его криво припаяли:
Хоть это и не влияет на функциональность, но это наводит на мысли, что производитель может так некачественно относиться и к другим компонентам контроллера и кто знает, в какой момент это может всплыть.
Питание и батарея
В этом разделе настраивается датчик тока, а также параметры аккумулятора. Все это нужно для того, чтобы квадрокоптер по OSD передавал актуальные и правильные данные об аккумуляторе, напряжении и токе во время полета.
У нас есть отдельная статья по этому блоку, рекомендуем к прочтению: Как откалибровать датчик тока и датчик напряжения в Betaflight
Порты
На этой вкладке находятся настройки для UART-портов, то есть, для последовательных портов, которые используются для обмена данными с различными компонентами, такими как приемник, видеопередатчик, GPS-модуль и так далее. USB VCP всегда включен, это тот порт, в который вы вставляете провод, microUSB.
В этом разделе обязательно нужно включить порт, который используется для обмена информацией с приемником. У различных полетных контроллеров он может быть разным, у нас Mamba F405 и у него порт для приемника — UART1. Поэтому включен ползунок на Serial Rx. Вам нужно посмотреть документацию к своему полетному контролеру, чтобы точно знать, какой порт включать для приемника.
Процессор
Betaflight F4 как это ни странно, используется процессор F4, таким образом позволяя работать на частоте 8kHz и 8kHz с динамической фильтрацией, но в свою очередь, появляются проблемы с инвертированием UART — неизменной проблемой в контроллерах F4.
Режимы
Этот раздел сделан для настройки разных тумблеров и крутилок на пульте управления.
Мы будем настраивать 2 стика:
- Арминг — поставнока и снятие с охраны квадрокоптера;
- Включение режима стабилизации и АКРО режим (ручной режим управления).
Чтобы назначить тумблеру действие, делаем следующее:
- Наводим мышь на ARM и жмем «Добавить диапазон»;
- Выбираем канал AUX1, например, либо можете оставить «АВТО» и щелкнуть любым удобным тумблером, автоматически будет выбран канал, который привязан к этому тумблеру (каждому тумблеру в пульте нужно привязать свой канал, как это делать, смотрите в видео (на английском, но все понятно):
После того, как выбрали AUX, пощелкайте тумблером. На ваши действия, по полоске будет «бегать» желтая точка, она соответствует положению тумблера. Если переместить желтые полоски на область , где будет находиться желтая точка, то квадрокоптер начнет реагировать на это положением, в нашем случае это арминг или снятие с охраны. - Нажмите «Сохранить».
Теперь, когда вы переведете этот тумблер, моторы дрона начнут вращаться с маленькой скоростью, дрон будет снят с охраны. Это называется «Заармить».
Так как на странице Конфигурация был включен ползунок на AIRMODE, квадрокоптер сейчас находится в ручном режиме без стабилизации, то есть, в режиме АКРО.
Режим ANGLE это режим стабилизации. Его назначаем на другой тумблер. Обычно эти 2 режима назначают на один тумблер у которого 3 позиции, то есть, на вторую позицию настраивают ARM и АКРО, а на 3 позицию ANGLE режим, чтобы они не накладывались друг на друга и в случае чего, вы просто переведете в верхнее положение тумблер, чтобы включилась стабилизация.
Рекомендации: проверка безопасности
Перед установкой пропеллеров, рекомендую выполнить ряд проверок, чтобы избежать проблем перед полетом.
Проверить направление двигателей
Перейдите во вкладку «Моторы» и включите режим тестирования по кнопке «Я понимаю всю опасность»:
Теперь запустите моторы (надеюсь вы сняли пропеллеры?) и проверьте, в правильную ли сторону крутятся двигатели в соответствии с этой схемой:
Проверить загрузку процессора
Пока квадрокоптер подключен к Betaflight, посмотрите на нижний сайд-бар:
Если загрузка будет 95% и выше, то у вас будут проблемы во время полета, так как процессор перегружен и не будет успевать вовремя обрабатывать данные. Чтобы решить эту проблему, отключите некоторые функции или отключите разгон, если у вас контроллер F4. Но на современных полетных контроллерах такая проблема — большая редкость.
Проверить гироскоп
Перейдите во вкладку Система и и проверьте настройки гироскопа:
Возьмите квадрокоптер в руки и наклоняйте его во все стороны, ваши действия точь-в-точь должна повторять 3D модель на экране. Стрелка указывает на нос дрона. Если это не так, вернитесь в начало статьи, «Конфигурация», блок 2.Кроме этого, после настроек и тем более прошивки, нужно калибровать акселерометр.
Сделайте бекап настроек
Выводы
Несмотря на эти мелкие недочеты, я считаю Betaflight F4 лучшим контроллером полета на сегодняшний день. Можно смело сказать разработчикам: «Браво!». Работу они провели достойную.
Купить Betaflight F4: ЗДЕСЬ





 купить по привлекательной цене 46990 руб. в Москве")