

- 1: строим раму
- 2: монтируем силовой агрегат и пропеллеры
- 3: устанавливаем «мозги»
- 4: калибровка полетного контроллера и пульта
- Варианты
- Выбираем тип и размер квадрокоптера
- Выбор датчиков
- Инструменты, которые нужны для сборки квадрокоптера
- Как подключить электронику всего квадрокоптера
- Камера
- Квадрокоптер на arduino
- Квадрокоптер с камерой своими руками: видео процесса сборки
- Квадрокоптер с рамой, моторами , регуляторами оборотов (esc) и пропеллерами
- Комплект arf
- Комплектующие
- Комплектующие рамы
- Моторы
- Настроить и “обучить” квадрокоптер с помощью по
- Немного о сборке
- Первый полет
- Постройка diy квадрокоптера. часть 1 теория
- Привязка и установка приемника
- Провод питания
- Процесс сборки
- Разработка
- Рама для квадрокоптера своими руками
- Рецепт сборки квадрокоптера своими руками
- С нуля
- Сборка
- Сборка рамы
- Собираем простейший квадрокоптер своими руками
- Схема проводки
- Таблица компонентов и примерные цены
- Технические характеристики собираемого квадрокоптера
- Финальная сборка
- Этап первый. сборка
1: строим раму
Независимо от габаритов или назначения каждый дрон должен иметь раму, каркас, несущую основу. Сборка готовых рам не должна вызывать сложностей ввиду того, что они снабжаются подробными инструкциями и всем необходимым крепежом.

А чтобы собрать раму самому, придется проявить конструкторские способности. Самостоятельно изготовленная рама квадрокоптера из металла, пластика, металлопластика или дерева должна быть достаточно прочной. К примеру, толщина деревянных частей каркаса, изготовленного своими руками, должна быть не менее 30 мм. Сборка своего квадрокоптера на недостаточно прочной раме – пустые усилия, потому что он будет часто ломаться.
В любом случае на выходе должно получиться заданное количество лучей одинаковой длины, которые несут на себе моторы и крепятся к центральной несущей пластине. На ней же установлены посадочные опоры или «ноги». В некоторых вариантах компоновки ноги «растут» из-под двигателей. Все зависит от особенностей, продиктованных чертежом квадрокоптера и его рамы.
2: монтируем силовой агрегат и пропеллеры
Двигатели, их контроллеры и пропеллеры играют ключевую роль в скорости, маневренности и других характеристиках полета. Поэтому следует выбирать продукцию брендов, тесно работающих в сфере квадрокоптеростроения, а не кого-нибудь, кто оказался в этом сегменте рынка случайно.
Моторы для одного проекта должны быть одной модели от одного производителя.
Да, движение происходит за счет разницы в скорости их вращения, но она должна быть строго контролируемой. Разношерстная компания двигателей нарушала бы баланс. Крепятся винтами на наружные концы «лучей».

После двигателей на плоскости их опор размещаются контроллеры оборотов и фиксируются стяжками. Соединение контроллеров с двигателями, также как с распределительной платой, осуществляется путем прямой пайки и коннекторов. При желании и бюджетных возможностях можно использовать контроллер 4-в-1, но тогда немного изменится схема компоновки квадрокоптера. В итоге получится почти готовый коптер, которому не хватает только полетного контроллера.
3: устанавливаем «мозги»
Полетный контроллер, как правило, монтируется в верхней части каркаса аппарата, над распределительной платой и отсеком для батареи. Компоновку допустимо изменять, но стоит помнить, что чем ниже центр тяжести, тем устойчивей аппарат.

Для минимизации влияния вибраций на работу полетного контроллера, его монтажная площадка часто крепится на резиновые проставки или используются более хитрые системы гашения вибраций. На этапе проектирования это хорошая возможность блеснуть инженерной смекалкой, не нанеся непоправимого вреда всей конструкции.
Только после того, как контроллер будет установлен, можно размещать оставшиеся узлы и модули: ресивер от пульта управления, GPS-датчик, магнитный компас, камеру, подвес и прочее.
И только размещать на корпусе, подключение допустимо только после первичной калибровки полетного контроллера.
Различные производители выпускают разные контроллеры, пульты управление и другие компоненты. Поэтому их калибровка – сложный и вариативный процесс, достойный отдельного рассмотрения.
Пропеллеры не рекомендуется устанавливать до полной калибровки аппарата. Исключительно во избежание травм.
4: калибровка полетного контроллера и пульта
Собранное устройство должно быть полностью откалибровано, а на пульте следует установить управление. Только после этого можно будет подыматься в воздух, не опасаясь потерять плод своих трудов. Однако точное описание процесса калибровки зависит от типа используемого контроллера и аппаратуры, поэтому следует уточнять необходимые шаги, исходя из этих данных.

Только потратив 200-300 долларов на компоненты, несколько дней на сборку, настройку и калибровку, можно наконец отправляться в полет на собственноручно построенном квадрокоптере. Нельзя не отметить, что за те же деньги доступны вполне функциональные серийные модели. Но дело ведь не в этом.
Приведенная выше инструкция достаточно поверхностна, но она дает очертания того, с чем придется столкнуться, чтобы квадрокоптер собрать. Постепенные уточнения помогут накопить хорошую теоретическую базу для последующего развития.
Подводя итоги, нужно отметить, что самостоятельно построенные дроны уступают в характеристиках моделям заводского производства, особенно если первые – дело рук начинающего конструктора.
Вот только дело в том, что самодельный квадрокоптер и не стремится конкурировать с титанами рынка. Это выбор для тех, кто любит погружаться в интересующую тему, конструировать или совершенствовать конструкции.
Варианты
Перед началом стоит вспомнить – а какие же есть способы получить свой квадрокоптер? На самом деле их пять.
RTF (ready to fly) – Просто купить готовый коптер. Тебе останется его просто достать из коробки и запустить в полёт. Это хороший вариант, если тебе не интересны эти конструкторы, и ты хочешь просто удовлетворить свою потребность в БПЛА. Однако, это далеко не так весело, как оставшиеся варианты.
Такой комплект подойдёт тем, кто хочет сделать дрон своими руками, но не собирается часами разбираться в документациях, калькуляторах и прочих тонкостях. Там всё так-же рассчитано производителем и подогнано. Нужно только собрать и настроить. Если ты сейчас выбираешь свой первый квадрокоптер, то это определённо твой выбор.
Выбираем тип и размер квадрокоптера
При сборке квадрокоптера выберите подходящий размер аппарата. Бывают такие:
- Мини квадрокоптер – маленькая модель, с небольшим радиусом действия. Помещается в ладонь, подходит для полетов в помещениях.
- Трикоптер — модель беспилотника,у которого только три пропеллера. Это делает его легче и маневреннее, однако теряется крутящий момент. Вместо этого используется механизм наклона заднего ротора. Сложно сделать своими руками.
- Обычный квадрокоптер – простой и недорогой беспилотник. Диагональный размер в среднем 35 см (без пропеллеров). Состоит из минимального набота деталей с целью уменьшения веса устройства. Характеризуется большой скоростью передвижения и маневренностью.
- Складной квадрокоптер берут в поездки, путешествия, когда важен размер и вес устройства. Складная рама облегчает транспортировку устройства. В самостоятельном изготовлении сложен.
- Большой квадрокоптер – самый дорогой и тяжелый тип беспилотника. Способен летать на дальние расстояния, оборудован емким аккумулятором, несет сложное фото- и видеооборудование. Делайте самостоятельно только если уже владеете навыками изготовления подобных устройств.
Выбор датчиков

Для управления квадрокоптером необходим акселерометр и гироскоп. Этого будет достаточно, если вы стоите устройство с простой конструкцией для полетов на небольшое расстояние. Для постройки сложного аппарата с множеством модулей, функций, поддержкой GPS придется установить дополнительные датчики. Для первой модели мы рекомендуем выбрать плату MPU-6050 — она содержит все необходимые датчики.
Инструменты, которые нужны для сборки квадрокоптера
Хоть это и довольно простая сборка, вам все равно понадобятся некоторые инструменты. Наиболее важный — это паяльник. Он нужен в нашем хобби и если вы собираетесь долго этим увлекаться, то купите какой-нибудь хороший, хотя бы такой.
Далее, вам понадобится следующее:
- Шестигранные ключи на 1,5 и 2 мм;
- Пинцет;
- Кусачки;
- Ножницы;
- Фен для пайки или зажигалка;
- Линейка;
- Мультиметр;
- Паяльник.
Дополнительные материалы:
- Термоусадка;
- Синий фиксатор резьбы (хотя я использую красный);
- Пластиковые стяжки (маленькие);
- Припой 63/37;
- Флюс.
Как подключить электронику всего квадрокоптера
Русифицированную инструкцию мне найти не удалось, спасибо моему другу который перевел с английского на русский эту инструкцию для вас.

При подключении моторов, придется продлить провода, методом наращивания. Можно использовать любые подходящие провода, но желательно “силиконовые”. Это позволит им не трескаться при низкой температуре, если вы вдруг захотите запечатлеть на видео новогодний салют зимой.
Камера
Можно использовать Runcam Eagle 2, но их уже не производят и возможно, когда вы будете читать, все уже раскупят, поэтому можно использовать любую альтернативу, в нашем случае это Runcam Micro Eagle, но для нее требуется переходник (обычно идет в комплекте) для дронов стандартных размеров.
Перед подключением камеры, вам нужно установить боковые крепления или переходник, используя винты М2, а также пластиковые прокладки. Установите камеру так, чтобы она была ровно по центру по горизонтали.
После прикрепления, подсоедините коннектор с проводами, который идет с камерой к полетному контроллеру.
Теперь можете настроить камеру. Подключите аккумулятор и проверьте, есть ли видео (у вас должен быть FPV шлем или очки. Для настроек — подключите к камере специальный джойстик.
Обычно настройки по умолчанию идеальны и не требуют изменений.
Квадрокоптер на arduino

Сегодня среди моделистов часто встречается слово Arduino. Что это значит, и какое отношение имеет к квадрокоптеру своими руками? Микроконтроллер Arduino Uno представляет собой электронное устройство небольшого размера, управляющее акселерометром, гироскопом и другими датчиками, передающее и принимающее информацию и т.д.
Оно состоит их системы устройств, отвечающих за определенную функцию. «Мозг» Ардуино это микроконтроллер. Он имеет память и способен выполнять несложные задачи. Сравнить его можно с однокристальным миникомпьютером. Следующей составляющей являются электрические выводы, которые находятся по периметру платы. Они выполняют роль рук для адруино. В завершении есть аналоговые или цифровые выводы, необходимые для управления.
Итак, нужно сделать квадрокоптер своими руками и обеспечить его базой, которая позволит коптеру взлететь в воздух и выполнять необходимые задачи. Ею и становится контроллер Arduino Uno для квадрокоптера, который обеспечит стабильность и управляемость в полете. Собирая квадрокоптер своими руками вы сэкономите до 15 000 руб., при этом создав вполне функциональный дрон.
Квадрокоптер с камерой своими руками: видео процесса сборки
Весь процесс по сборке квадрокоптера своими руками представлен в этом видео. Смотрим.
Ниже представлены фото, которые я нашел в интернете. На них представлены квадрокоптеры с камерой, которые были собраны своими руками из подручных средств.


Квадрокоптер с рамой, моторами , регуляторами оборотов (esc) и пропеллерами
А теперь давай разберёмся с тем, как собрать квадрокоптер мечты. Сразу скажу, что это обобщённый гайд, и некоторые моменты могут отличаться. Я попытаюсь систематизировать процесс, и указать на основные моменты выбора и сборки.
Сборка квадрокоптера своими руками начинается с выбора компонентов. Это самый ответственный этап.
Комплект arf
ARF (Almost Ready to Fly) – Тут всё слегка сложнее. Бывают разные степени «готовности». Где-то нужно докупить контроллер, а где-то в комплекте идёт только рама коптера. Собрать квадрокоптер, настроить и откалибровать придётся самому. Вариант для тех, кто хочет углубиться в тему и поковыряться в своём БПЛА.
Комплектующие
Детали для сборки квадрокоптера своими руками можно заказать на Aliexpress, или же распечатать некоторые из них на 3D принтере. Основные комплектующие:
- Рама.
- Винты.
- Полетный контроллер.
- Литиевые аккумуляторы (2x 3.7В)
- Пульт управления.
- Набор датчиков.
- Транзистор
- Болтики, соединительные провода.
- Зарядное устройство.
- Моторы для винтов.
- Инструменты для работы.
Если от старого компьютера осталось 4 одинаковых вентилятора (кулера), то моторчики от них годятся для сборки коптера. При первом опыте лучше отказаться от сборки квадрокоптера с камерой своими руками.
Сначала разберитесь с управлением, а только потом крепите камеру, чтобы при падении не лишиться одновременно и квадрокоптера и камеры. При сборке рекомендуется сделать широкое основание между лучами беспилотника. Тогда подвесить камеру можно будет без лишнего труда.
Простым вариантом также является квадрокоптер на 3d принтере своими руками. Для этого еще лишь нужно распечатать, скачав необходимые детали.
Комплектующие рамы
Несущая конструкция коптера крайне важна. От её характеристик зависит то, сколько лишней мощности у вас останется. Чем легче рама, тем она дороже. На счёт прочности особо напрягаться не стоит, если в ваши планы не входит постройка квадрокоптера для массивных камер.
Давайте условимся на том, что ты прочитал нашу статью про выбор набора для сборки квадрокоптера ,и воспользовался ценнейшем советом – брать раму с платой распределения. Если нет, то провода подключаем сразу к модулю управления.
Для примера рассмотрим сборку из следующих комплектующих:
- Каркас квадрокоптера Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm
- Мотор DYS D2822-14 1450KV Brushless Motor. 4 штуки
- Регулятор DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления квадрокоптером KK2.1.5 kk21evo
- Аккумуляторная батарея литий-полимерного типа Turnigy nano-tech 2200mah 4S ~90C Lipo Pack
- Устройство для зарядки аккумуляторов Hobby King Variable6S 50W 5A
- Коннектор для подключения аккумулятора XT60 Male Plug 12AWG 10cm With Wire
- Коннекторы 20 Pairs 3.5mm Bullet Connector Banana Plug For RC Battery / Motor
- Пульт управления квадрокоптером Spektrum DX6 V2 with AR610 Receiver (в комплекте с приёмником и передатчиком)
Размазываем компоненты по столу ровным слоем, и начинаем.
Моторы
Хоть это и необязательно, но я использую оплетку для проводов.
Это прибавляет такой брутальности вашему дрону. Можете использовать, например, оплетку диаметром 6 мм, так как 4 мм будет маловата, ссылка будет в конце статьи.
- Отрежьте 4 куска шнура по 7 см и оплавьте концы, чтобы они не распушились. Наденьте оплетку на провода и наденьте на края по куску (2 см) термоусадки, чтобы закрыть концы.
- Прикрутите двигатели к лучам рамы с помощью винтов М3 х 6 мм, предварительно обмазав резьбу синим фиксатором резьбы.
Фиксаторы резьбы продаются в автомагазинах.
- Теперь начните припаивать провода моторов к площадкам на регуляторе оборотов. Старайтесь припаять так, чтобы контактная площадка была полностью в припое. Начинайте паять с дальнего края, к себе.
- Если провода длинные, укоротите их, чтобы они не торчали и потом припаивайте.
- После того, как провода будут припаяны, подвиньте термоусадку к краю и усадите ее зажигалкой или феном.
Настроить и “обучить” квадрокоптер с помощью по
Итак мы собрали квадрокоптер с камерой своими руками, осталось обучить нашу машину правильно вести себя в полете. Для этого нужно ее “обучить”. Как это делается? Очень просто! Нужно загрузить прошивку на плату через usb. Найти эту прошивку можно на специализированном форуме или на нашем сайте. Когда выйдет статья с прошивкой, тут появится кликабельная ссылка на прошивку.
Если вы еще не умеете летать на квадрокоптере и хотите научиться, то специально для вас я напишу статью на эту тему. Ссылка появится здесь. Там я расскажу об особенностях управления квадрокоптером и на каком быстрее всего научиться летать как профессионал.
Что же касается второго этапа, то тут все просто нужно прикрепить камеру, которую вы сочтете подходящей для себя по цене и по качеству. В видео обзорах вы найдете подходящую камеру, если нет, то пишите в чат, что располагается в левом нижнем углу, другие пользователи вам подскажут.
В завершение этой статьи предлагаю вам посмотреть еще одно видео по сборке квадрокоптера с камерой своими руками.
Немного о сборке
Чтобы прикрепить верхнюю пластину, я использовал скрытые шайбы и винты с плоской шляпкой, но это делать необязательно, мне просто захотелось сделать дрон немного ярче.
Так как двигатели для этой сборки продаются без крепежных винтов, то вам нужно еще докупить и их — шестигранные винты М3 х 6 мм.Лучше купить сразу набор из 100 штук. Также, некоторые винты для сборки рамы я использовал с антивибрационными подушками.
Первый полет
Ощущения от первого полета: фантастика! Коптер стоит в воздухe как вкопанный, отлично управляется как визуально, так и через FPV. Время полета на одном заряде — 14 минут, и запаса мощности хватает с лихвой для вполнe комфортабельного полета и маневрирования.
С настройками контроллера я еще слегка поковыряюсь — GPS работает плохо (позицию практически не держит, return-to-home не работает), да и PID-параметры надо подстроить (убавить P по оси крена, чтобы избавиться от видимых в видео легких поперечных вибраций).
В общем и целом, проект удался. Коптер я буду активно использовать для полетов и съемок в ближайшие недели.
Постройка diy квадрокоптера. часть 1 теория

Принцип полёта

*250 размер: маленький, легкий, чаще все используют только для FPV полётов.
Привязка и установка приемника
Мне нравится этот полетный контроллер, потому что он идет с разъемом для приемника. Я использую в этой сборке приемник FrSky XM , но вы можете использовать любой совместимый с SBUS протоколом приемник.
- Если вы не используете последовательный приемник 3,3V, то отрежьте (или отковырните) зеленый провод у коннектора с проводами.
- Теперь припаяйте оставшиеся 3 провода к контактам на приемнике.
- Далее разместите полетный контроллер в общую башню и подключите его к регуляторы оборотов (ESC) с помощью коннектора с проводами.
- Четвертым шагом идет подключение антенны к видеопередатчику. ЗАПОМНИТЕ! Никогда не включайте видеопередатчик (по факту сам дрон) без антенны на видеопередатчике, потому что он сгорит.
- Привязываем приемник к аппаратуре: — подключите приемник к полетному контроллеру с помощью коннектора; — проверьте, чтобы в цепи питания не было короткого замыкания; — удерживайте кнопку привязки приемника и подключите аккумулятор;
— переведите пульт управления в режим привязки, чтобы приемник мог «привязаться» к нему.
- Теперь, когда приемник «привязан», можете убрать его под стойку или в другое место (не отсоединять, а убрать): — ослабьте крепление регулятора оборотов (ESC); — отрежьте кусок термоусадки по размеру приемника и усадите в нее приемник; — положите его под регулятор оборотов так, чтобы антенны расходились в две разные стороны (как на фото);
— с помощью пластиковых стяжек закрепите антенны на лучах, так, как показано на фото.
- Теперь поправьте еще раз все провода, чтобы было аккуратно и закрепите полетный контроллер поверх всего пластиковыми гайками.
Провод питания
Контроллер полета идет в комплекте с конденсатором и его тоже нужно припаивать. Конденсатор позволяет сглаживать скачки напряжения и предотвращает помехи на видео.
Убедитесь в правильной полярности контактов (плюс к плюсу, минус к минусу), примерьте его у контактов питания на плате регулятора оборотов, укоротите ножки и залудите (нанесите припой). Теперь возьмите кабель питания и при необходимости тоже залудите. Разместите конденсатор с нижней стороны платы, а кабель питания сверху, чтобы они не мешали друг другу. Припаяйте.
Процесс сборки
Существует масса вариантов компоновки и конструкции мультикоптеров, но наиболее распространены именно модели с четырьмя винтами. Поэтому сборка такого квадрокоптера послужит примером для поэтапного обзора процесса сборки. В процессе можно опираться на примерные чертежи квадрокоптеров из сети или составленные самим.
Разработка
Вдохновением для общей формы коптера послужила рама
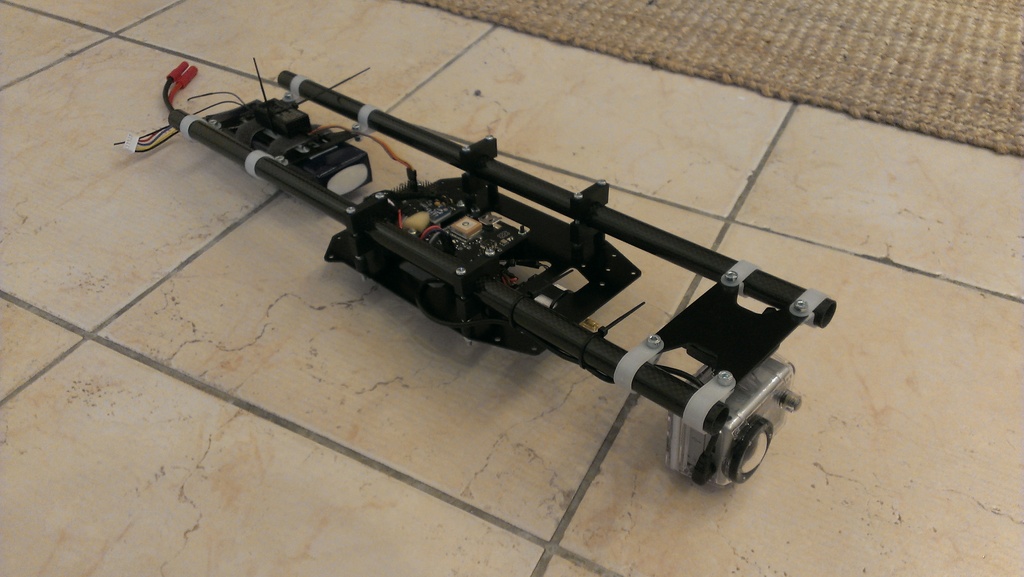
. Мне понравилось расположение компонентов в одном уровне — камера спереди, потом смещенный вперед центр, и подвешенный сзади аккумулятор. Такая схема позволяет расположить камеру так, что пропеллеры не попадают в ее поле зрения. Также они придумали хороший способ виброизоляции — камера и аккумулятор подвешиваются к двум горизонтальным трубам, которые в свою очередь монтируются на центр с помощью резиновых изоляторов.
Однако полностью под мои потребности Spidex не подходил. Во-первых, в нем использованы алюминиевые трубки, от которых я уже натерпелся — гнутся они, причем даже без аварий, просто от постоянной нагрузки. Во-вторых, я использую камеру GoPro Hero HD2, одолженную на неопределенный срок у сожителя — я нe готов монтировать ее на коптер без защитного корпуса, а Spidex этого не предусматривает.
Короче говоря, от Spidex я решил использовать только общую компоновку. Раму я решил собирать самостоятельно, используя стеклопластиковые пластины и карбоновые трубы с зажимами. У знакомого дома стоит фрезерный станок, на котором можно вырезать пластины необходимой формы. Чтобы создать эту самую форму, я засел за LibreCAD, и вот что у меня получилось:
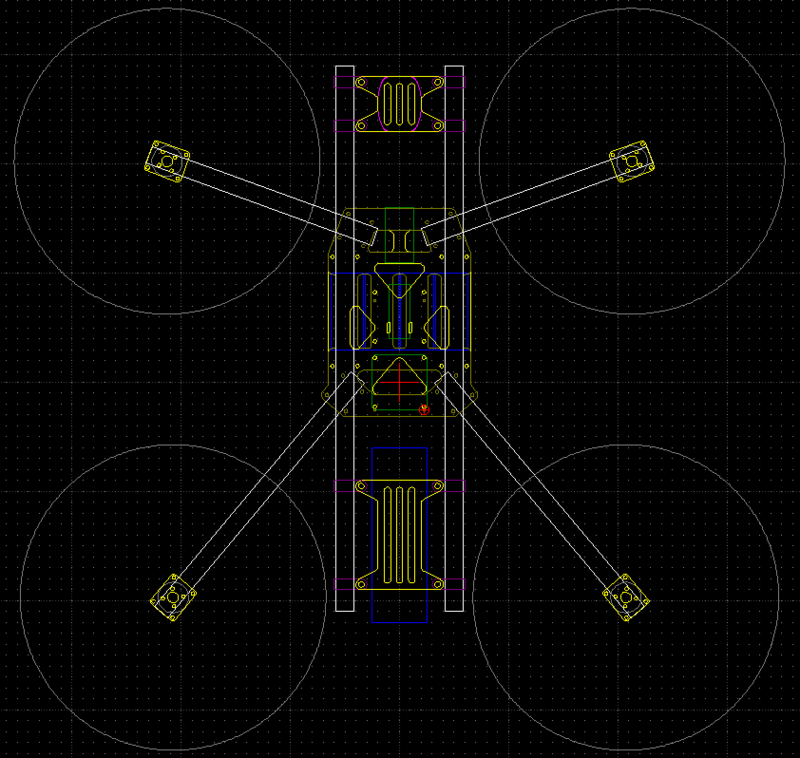
Общий вид коптера сверху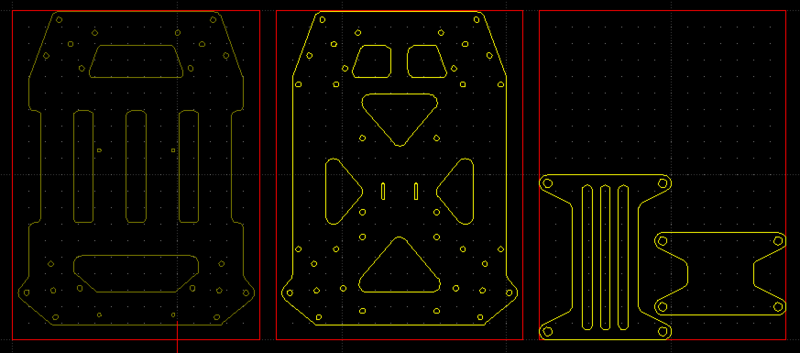
Центральные пластины и держатели камеры и аккумулятора
Удовлетворившись данным результатом, я передал чертежи знакомому, и заказал всe необходимые детали в местных (немецких) онлайн-магазинах. В частности, были куплены карбоновыe трубки (16×14мм, метровой длины, три штуки — для рамы нужны будут две, ну и про запас), зажимы для них вместе с подходящими винтами/гайками (из набора FCP HL от Flyduino), провода для прокладки через трубки к моторам, виброизоляторы (сайлент-блоки под М3), и куча всякой мелочевки.
Всю электронику я решил использовать с предыдущего коптера. Два квада мнe ни к чему, все прекрасно работает — зачем покупать новые детали? Список той самой электроники и других деталей, перекочевавших с предыдущей модели:
Рама для квадрокоптера своими руками
Чтобы наш квадрокоптер чувствовал себя уверенно в полете, его нужно снабдить неким скелетом, на котором будут держаться все механизмы управления. Существует два подхода к решению этой задачи:
- готовая рама для квадрокоптера;
- рама собранная своими руками;

Чтобы выбрать наиболее подходящий вариант для Вас, нужно понимать некоторые нюансы. Если приобрести готовую раму, то как правило на нее уже можно все прикрутить и можно запускать в полет. Но если, какая-нибудь деталь будет повреждена при падении или неаккуратном использовании, ожидание этой детали займет некоторое время, пока она будет доставлена курьерскими службами на ваш адрес.
Что касается сборной рамы своими руками из подручных средств, то в этом случае нужно будет повозиться, чтобы все ровно вырезать и прикрепить. В случае каких-либо казусов, поломанную деталь можно будет легко заменить.
Самым распространенным вариантом для изготовления рамы из подручных средств, являются пластиковые трубы, которые применяют при строительстве для проводки проводов. Их свойства идеально подходят для крепления всех необходимых элементов управления, двигателей.
С помощью таких труб получается довольно-таки хорошая конструкция, на которой надежно можно закрепить все детали квадрокоптера и и камеру. Итак, у нас почти готов квадрокоптер с камерой своими руками, осталось все это правильно собрать и отправиться на испытательные полеты.
Рецепт сборки квадрокоптера своими руками
Для сборки квадрокоптера нам понадобятся следующее:
- четыре двигателя для квадрокоптера;
- четыре регулятора оборотов;
- четыре воздушных винта (пропеллера), можно с запасом;
- силовой разветвитель 3,5 мм;
- настраиваемая плата через usb для управления квадрокоптером;
- четыре аккумулятора или более, чтобы получить максимум удовольствия от полета;
- зарядное устройство для подзарядки аккумуляторов;
- устройство радиоуправления квадрокоптером (продается вместе с приемником и передатчиком);
- дополнительные платы для соединения приемника с “мозгами” квадрокоптера;
- провода в силиконовой оболочке для моторов, по две штуки красного и черного;
Это все что касается механизмов и управления.
С нуля
Это выбор продвинутых юзеров. Строить коптер с нуля — значит самостоятельно подбирать оптимальные компоненты, разрабатывать и изготавливать раму и так далее. Это сложный, но очень интересный путь, особенно, если не брать готовый модуль управления, а попытаться использовать Arduino или raspberry pi.
Мы не ищем лёгких путей. Дедушкин гараж, алиэкспресс и помойка электроники – наш выбор. Путь боли, ПВХ труб и хардкора, но в результате ты получишь полностью самодельный квадрокоптер. Тут полный простор для фантазии, а все необходимые комплектующие и чертежи квадрокоптеров можно найти в интернете.
Сборка
Через несколько дней все детали были на месте, и можно было приступать к сборке.
Детали разложены на столе, сборка начинается. Порядок долго не продержался…

Для начала пилим трубки под нужную длину — 22см и 28см, все четыре пилятся из одной метровой трубки. Пилкой для металла с мелкими зубьями идет очень хорошо.

Примеряем зажимы к нижнему центру.

Центр собран для проверки, все ли стыкуется как надо. Вроде да.

Прикрутил все остальные части рамы. Похоже, что почти готово? Как бы не так.

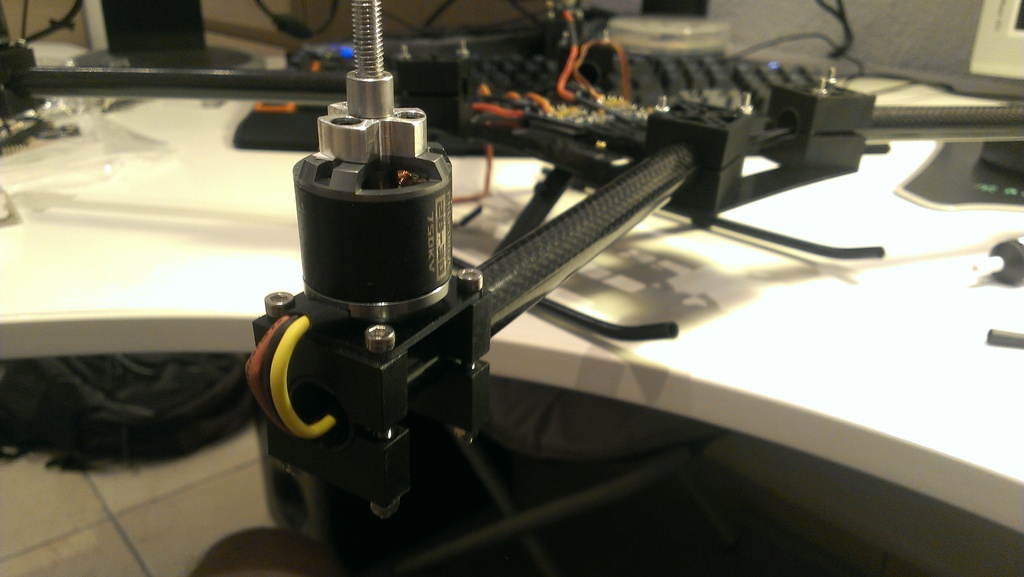
Оси моторов нужно обрезать — они выступают с задней стороны, и мешают установке сверху трубок. Обклеиваем мотор клейкой лентой, дабы не допустить попадания металлических опилок внутрь…

… и Дремелем его, Дремелем. Дремель режет 3-миллиметровую ось как нож масло. Главное защитные очки нe забыть.

Снимаем термоусадку с контроллеров моторов, чтобы припаять новые провода.
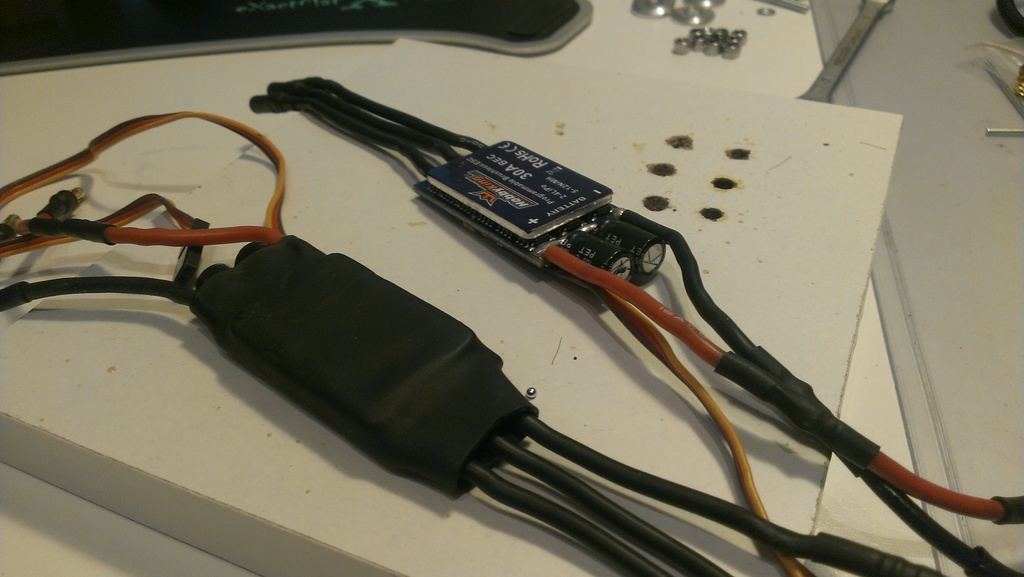
Провода нарезаны под нужную длину. Припаиваем разъмы для моторов. По три фазы на мотор, паять надо дофига — и это всeго лишь квад.

Размещаем контроллеры на нижней полураме.
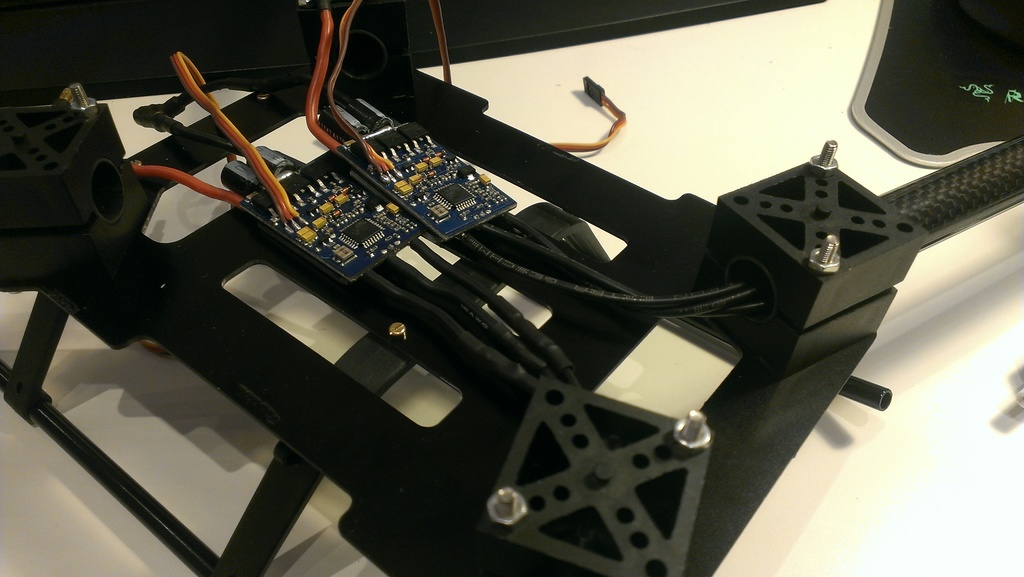
Прикручиваем мотор и проводим кабеля через трубку. Всe собирается, как запланировано!
Изолируем контроллеры новой термоусадкой, когда все кабеля на месте.

Устанавливаем контроллеры моторов на их окончательную позицию. Проводов многовато, но достаточно чисто.
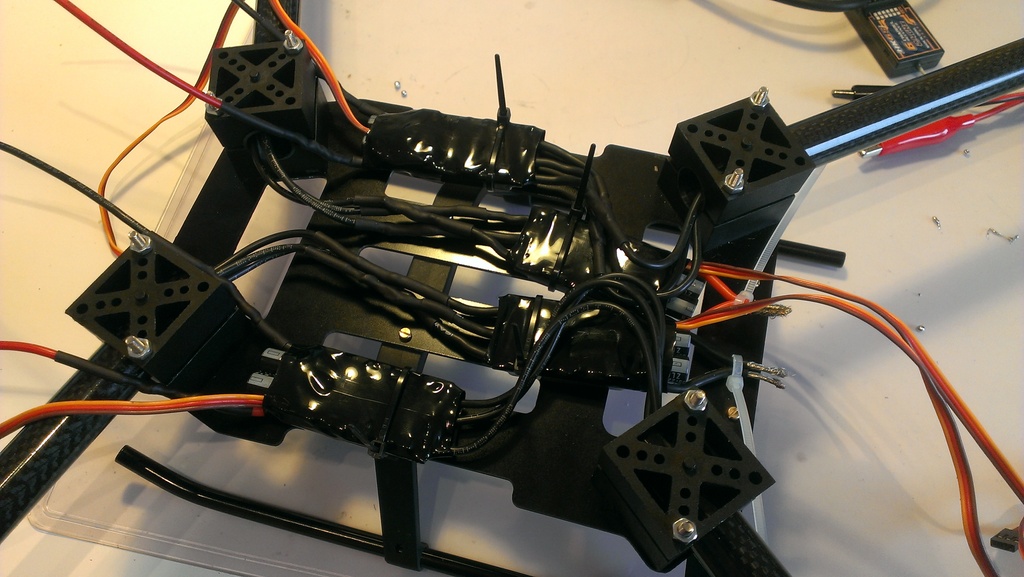
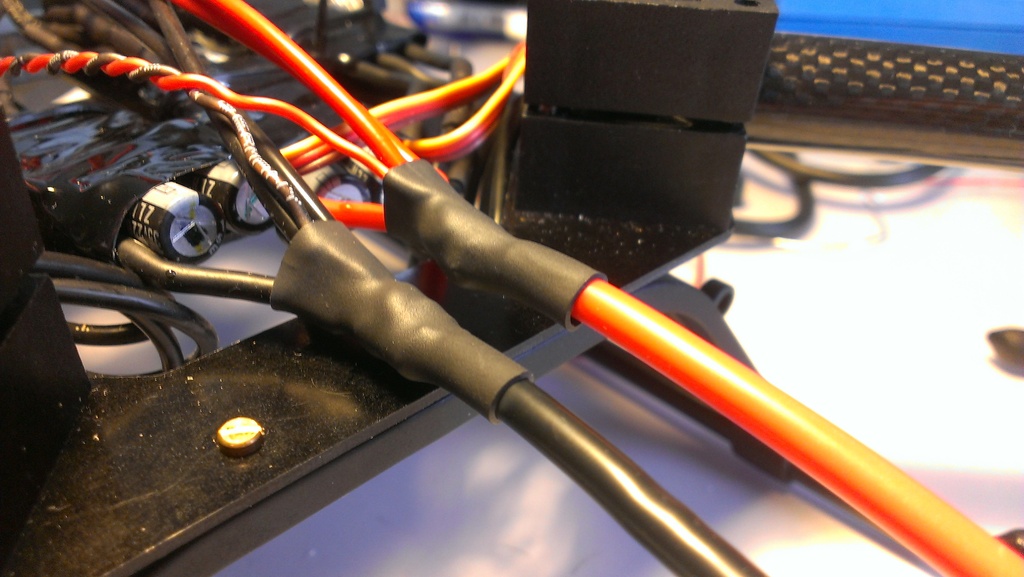
Разводка проводов от аккумулятора, методом RCExplorer. Сначала собираем провода от контроллеров пучком…
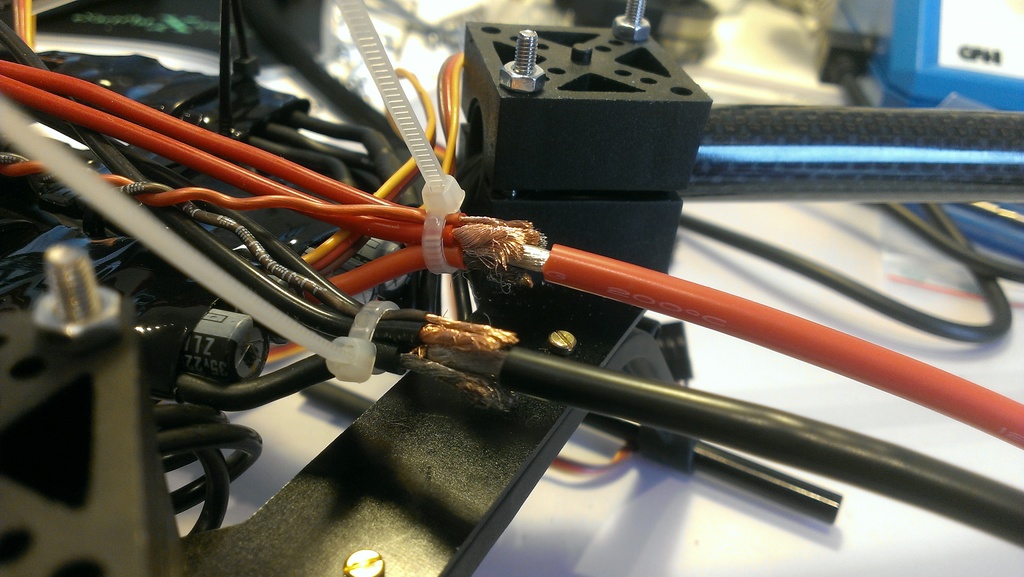
… стягиваем тонкой медной проволокой…
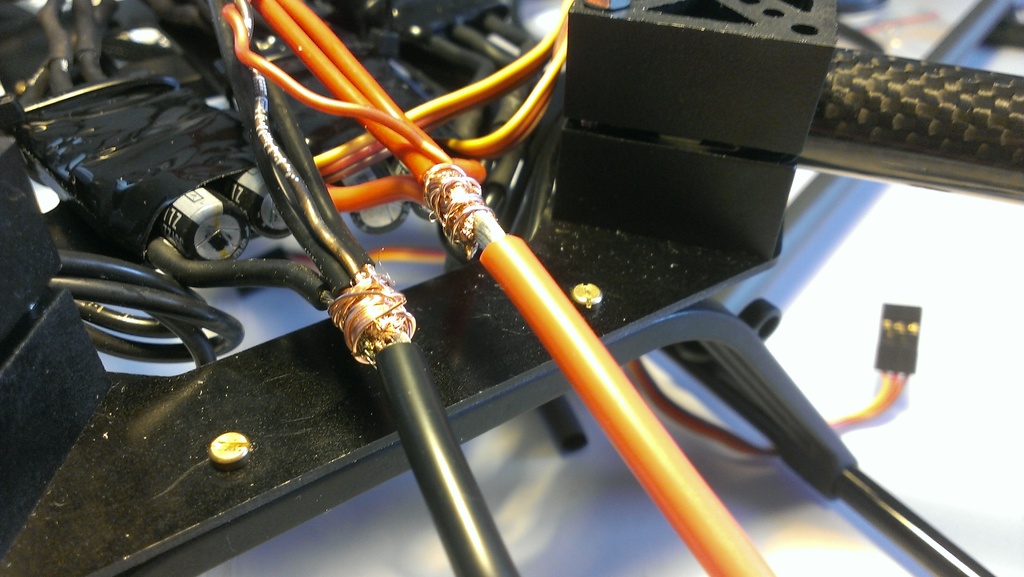
… спаиваем, и изолируем термоусадкой. Соединение получается механически крепкое, и хорошо проводящее.
Примеряем итоговую сборку: все совпадает! Верхняя полурама еще не прикручена, просто лежит сверху.

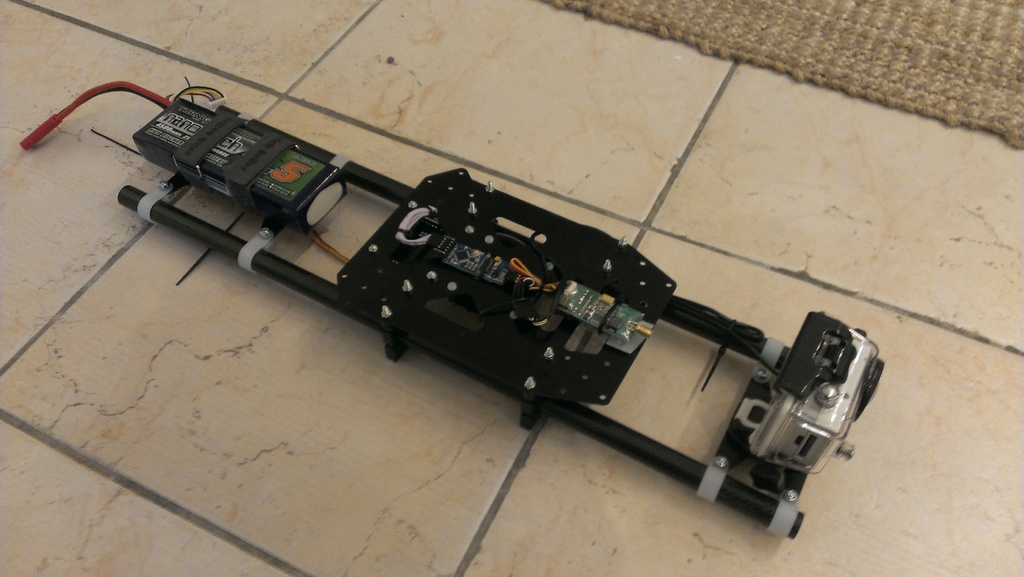
Верхняя полурама с управляющей электроникой в центре (контроллер и GPS) и виброизолированными трубками с камерой и аккумулятором.
Видеооборудование нa нижней стороне верхнего центра: видеокабель из камеры идет в MinimOSD, там на него накладывается информация из полетного контроллера, и дальше в видеопередатчик.
Нижняя полурама готова к установке верхней. Моторы приподняты, чтобы зажимы в центре не распались, когда будут откручены временные гайки.

Устанавливаем и прикручиваем верхнюю полураму. Затягиваем гайки, соединяем всe провода…

… готово!
Результат сборки:
Вот такой коптер получился. Единственное, чем я недоволен — это вес. Облегчить конструкцию не удалось, за счет зажимов для трубок и огромного количества винтов с гайками общий вес поднялся до 1950 грамм. Однако это еще вполне в рамках мощности привода — мои сомнения были полностью развеяны во время первого полета.
Сборка рамы
Рама идет в комплекте с подробной инструкцией, поэтому особо добавить нечего. Гайки без пластинок антискольжения, поэтому их нужно фиксировать при закручивании.
Обратите внимание на заостренные концы на лучах, они должны быть направлены на внешнюю сторону, чтобы случайно не прикрутить их в обратную сторону.
Для монтажа башни из полетного контроллера и регулятора оборотов (FC и ESC) вместе с рамой идут винты на 15 мм.
Также, чтобы отделить раму от регулятора оборотов, в комплекте идут резиновые антивибрационные биты, их нужно вставить между платой и рамой.
Как вы поняли, они защитят от вибраций полетный контроллер, так как там установлен гироскоп. Далее, ставите специальные опоры, на которые потом установите полетный контроллер.
Сейчас полетный контроллер ставить еще не нужно! Поставите позже.
Собираем простейший квадрокоптер своими руками
Ввиду развития технического прогресса фотографы, видеографы и блогеры все чаще используют в своем арсенале квадрокоптеры. При этом цены на нормальную модель начинаются от 30 000 руб.
Кроме того пользователи часто желают установить на него свою камеру, а не далеко не все подвесы популярных моделей это позволяют. Поэтому актуальным остается вопрос, как сконструировать квадрокоптер своими руками.
Схема проводки

Собранная своими руками модель квадрокоптера требует правильного подсоединения проводки, иначе устройство вряд ли взлетит в воздух. Сначала сделайте параллельное соединение четырех проводов питания. Понадобятся разъемные соединения в месте подключения батареи к проводам.
Во всех остальных местах необходимо сделать спайку. Детали потребуется затянуть при помощи термоусадки, иначе в дальнейшем из-за вибрации во время полета они отсоединятся. Далее займитесь управляющей платой, подключите провода драйверов. С этого момента приступайте к проверке полетного контроллера для устранения возможных проблем.
Таблица компонентов и примерные цены
Если у вас есть вопросы, задавайте их в х
Технические характеристики собираемого квадрокоптера
- Контроллер полета F4;
- Видеопередатчик 600 mW;
- Камера Eagle 2 CMOS;
- Датчик тока;
- Качественные моторы 2306;
- Всего 17 точек пайки.
Финальная сборка
Теперь все, что нужно сделать, это установить верхнюю панель и закрепить антенну видеопередатчика. Для начала привинтите стойки к верхней панели с помощью винтов 6 мм или скрытыми шайбами, как я. Антенну рекомендую закрепить двумя пластиковыми стяжками.
- Рама шла с специальными вспененными подушками для аккумулятора, но я решил купить другую, липкую, на такой аккумулятор будет держаться надежнее.
- Теперь остается соединить верхнюю панель со стойками к нижней и все, сборка завершена!
Этап первый. сборка
- Примерно прикидываешь необходимую длину проводов контроллера, прибавляешь небольшой запас «на криворукость» и обрезаешь их до нужной длины
- Припаиваешь коннекторы к выходам регуляторов, чтобы потом проще было подключать моторы
- Припаиваешь регуляторы к плате разводки
- Припаиваешь коннектор аккумуляторного блока к плате разводки
- Прикручиваешь двигатели на лучи коптера. При установке моторов постарайся не сорвать резьбу
- Если коннекторов на двигателях нет, то припаиваешь и их
- Привинчиваешь лучи с двигателями к плате
- Крепишь регуляторы к лучам дрона. Не важно чем, но удобнее всего пластиковыми хомутами
- Подключаем провода регуляторов к двигателям в произвольном порядке. Если будет нужно – потом изменим
- Закрепляешь на корпусе модуль управления (предварительно сфотографировав тыльную часть. Пригодится). Снова хоть на жвачку, но советую пока использовать мягкий двухсторонний скотч
- Подключаешь регуляторы оборотов к контроллеру. В те порты, которые отмечены ( — пусто), обычно подключается белым проводом к экрану
- Остатками скотча закрепляешь приёмник как можно ближе к блоку управления, и подключаешь нужные каналы к нужным портам. Используй документацию своего приёмника и фото тыльной стороны платы, чтобы разобраться какая пачка проводов за что отвечает
- Подключишь питание устройства от батареи, через коннектор
- Profit! Ты собрал свой квадрокоптер
- Запускаешь двигатели (тут обычно всё по-разному, так что снова смотри документацию)
- Немного прибавляешь газ, и смотришь в какую сторону вращаются пропеллеры. Они должны вращаться так, как указано в схеме, которая прилагается к контроллеру. Иначе управление будет инвертироваться. Если что-то не так, то просто переворачиваешь коннектор, который соединяет двигатель и контроллер
- Когда всё вращается правильно – прикручиваешь верхнюю деталь рамы. Не заталкивай её на своё место. Если она встаёт туго, значит что-то пошло не так. Ослабь нижние винтики, а после установки затяни всё равномерно
- Закрепляешь блок с аккумуляторами
- Монтируешь адаптеры для пропеллеров на моторы
- Устанавливаешь пропеллеры, учитывая направление вращения моторов. Приподнятая часть лопасти должна смотреть в направлении вращения
- Готово.Твой коптер готов пережить первое включение!
Это был один из простейших примеров, с которого стоит начать. Конечно, если ты хочешь использовать камеру, GPS или более сложный контроллер, то конструкция будет сложнее. Поэтому, если вы не уверены в своих силах, то стоит начать с малого. Всё остальное можно прикрутить потом.
Квадрокоптер – это летающий аппарат, двигающися посредством регулировании скорости вращения двигателей с пропеллерами
- квадрокоптер это один из простых летательных аппаратов у которого много поклонников.
- квадрокоптер аэродинамически не устойчив и требует компьютерное управление для сабильного полёта.
- Поэтому квадрокоптер это целая “летающая система” и если его “компьютер” не работает, то он не летает.
- квадрокоптер, как показан выше, является простым типом мультикоптеров , с каждой парой двигателей вращающихся в противоположную сторону.
- это позволяет ему использовать осевое вращение (Yaw) вправо или влево, посредством ускорения одной пары и замедлением другой пары двигателей.
- горизонтальное движение осуществляется за счет ускорения двигателями (увеличение тяги оборотами) на одной стороне и снижение тяги на другой.
- это позволяет наклонить квадрокоптер (Roll or Pitch) в нужном направлении движения , после чего тяга двигателей уравновешивается.
- угол наклона , как правило определяет скорость движения в этом направлении.
- что бы скомпенсировать порывы ветра компьютер наклоняет автоматически квадрокоптер в сторону направления порыва.
- для того, что бы это работало на квадрокоптере должны быть электронные “гироскопы”, которые измеряют уровень по трем осям
- помимо этого он может быть оснащен электронными акселерометрами, которые определяют смещение по трем осям
- контроль высоты и её изменение осуществляются путём ускорения или замедления оборотов двигателя.
- сам квадрокоптер, включая раму, моторы, регуляторы скорости (ESC) винты (пропеллеры) и батареи
- Полетный контроллер или автопилот, который обеспечивает стабилизацию и в более развитых системах (таких как APM 2.6) автоматический контроль.
- Компьютер или ноутбук (телефон, планшет) для того, что бы запрограмировать полетный контроллер (что не обязательно) и для использования в качестве телеметрической наземной станции.
Демонстрационное видео демонстрирующее ручное и автоматическое управление.
- Полет начинается с режима Stabilize “стабилизация” , который обеспечивает стабилизацию по горизонту и ручное управление.
- Loiter Mode – квадрокоптер автоматически подерживает позицию и высоту , но допускает ручное управление.
- Simple Mode – позволяет управлять квадрокоптером без учета орентации ( используя компас)
- Auto Land – автоматическая посадка и переход в режим постановки в охрану (Disarm) , когда он приземлится.
Основные требования квадрокоптеров это обладание досаточной тяги у моторов пропеллеров , способные его поднять:
- Благодаря тому, что технологии литиевых батарей позволяют это сделать
- Предыдущие технологии не позволяли обладать достаточным потенциалом и были слишком тяжелые и не производительные.
- Бесщеточные двигатели (Brushless motor) и электронные контроллеры скорости (ECS) повышают полетные характеристики, выносливость моторов и их надежность (работа на отказ). при разумной дисциплине можно летать в дождь и не волноваться за моторы.
- Карбоновые , алюминевые и стеловолоконные технологии облегчают вес давая эфективность и производительность по соотношению к весу апарата.
- Полетный контроллер (ArduPilot) является мозгом , который позволяет квадрокоптеру творить потрясающие вещи.
- Группа разработчиков опирается на APM контроллер , который имеет хороший потенциал
- В полетный контроллер встроенно много датчиков, необходимых для автоматического полета
- В эту систему включены : трех осевой гироскоп, трех осевой акселерометр, компас (магнитометр) , барометр (высотомер) и GPS.
- ArduPilot подключается к моторам , радиопередатчикам, телеметрии и камеры контроля.
- Современные радиоуправляемые системы 2.4МГц обеспечивают быструю и очень надежную связь с квадрокоптером.
- Программа Mission Planer позволяет обновить прошивку Автопилоту
- Программа так же позволяет загружать пользовательские параметры (миссии / точки) и прочие инструкции в квадрокоптер.
- Кроме того, можно использовать планирование миссии полета , анализировать журналы полета записаные на автопилот.
- А еще программа может работать как телеметрическая наземная станция (Ground Station) , где отображаются в реальном времени данные полета.
- Квадрокоптер – устойчивая система , но ей нужнен тщательно подобранные компоненты.
- Прогнозируемый вес, производительность, время полёта и полезной нагрузки – это требует сбалансированного подхода, что бы добиться хороших результатов.
- Высокая производительность, как у квадрокоптеров (quadrocopter) для хобби или использования камеры (сьемок с воздуха) требуется уже более тяжелоподъемный мультикоптер – гексакоптер, октакоптер (hexacopter, octacopter)
- Размер рамы и её вес, двигатели и пропеллеры, мощность батареи и полезная нагрузка – являются важными параметрами при постройке мультикоптера.
- Небольшой квадрокоптер (quadrocopter) идеально подходит , что бы научиться летать, хорош для новичков, которые осваивают это.
- Большой гексакоптер (Hexacopter) или октокоптер (Octacopter) с камерой для съемок дорогой и серьезный аппарат, требует професиональных навыков.
- это сильно бъет по карману, в случае его падения и это стоит учитывать.
Модели доступны в нашем магазине, Эти мультикоптеры являются быстрыми, слаженными и доказали свою работу с APM Автопилотом. Для новичков и базовых миссий квадрокоптеры являются наилучшим вариантом для простоты и экономичности в затратах. Гексакоптеры являются более стабильными имею хороший дизайн, отлично подходят под сьёмки.

 (LiPo) - 94182PRO")





