

- Что может стать причиной поломки
- Основные неполадки квадрокоптеров и способы их устранения
- Rashvinta
- Балансировка пропеллеров с помощью подручных средств
- Вертикальное движение квадрокоптера
- Запчасти walkera
- Использование компьютера.
- Как дроны поворачивают?
- Как найти потерянный квадрокоптер?
- Как проверить выход на мотор квадрокоптера, если не крутятся моторы?
- Какие бывают размеры пропеллеров
- Калькулятор ecalc
- Конструктор не справился со флипом
- Конфигурация пропеллеров
- Кратко: устройство квадрокоптера
- Материал пропеллеров
- Методы установки
- Не вращается один или несколько двигателей
- Не работает винт квадрокоптера
- Пластик и карбон: где качество и эффективность
- Повышенный шум работы и нестабильный полет
- Послушайте какие звуки издает неработающий мотор
- Проблема в электронике
- Работа моторов
- Схема установки пропеллеров
- Увеличение дальности управления квадрокоптером
- Шаг пропеллера
Что может стать причиной поломки
Несмотря на то, что квадрокоптер носит исключительно развлекательный характер и создается в качестве большой игрушки, он имеет достаточно сложную конструкцию. Такое техническое устройство оснащается множеством важных элементов, обеспечивающих его бесперебойную работу.
Многие проблемы пользователь в состоянии устранить самостоятельно, поэтому переживать из-за впустую потраченных средств не стоит, аппарат еще продемонстрирует чудеса на виражах, если основательно подойти к вопросу. Находясь в неправильном положении винту квадрокоптера не могут работать.
По важности винты находятся на втором месте, на первом двигатель. Они обязательно должны располагаться в требуемом порядке, если посмотреть в инструкцию, то этот порядок там изображен схематически. У каждой модели он свой и может отличаться, поэтому не поленитесь посмотреть в документ.
Основные неполадки квадрокоптеров и способы их устранения
Как и любому другому сложному техническому устройству с большим количеством механических деталей, подверженных постоянным нагрузкам, квадрокоптерам, иногда, свойственно ломаться.
Для того, чтобы вы, при первой же поломке квадрокоптера, которую вполне можно устранить своими силами, не теряли голову и не мчались в пункт ремонта, мы и подготовили данную подборку, в которой вы найдете основные неполадки квадрокоптеров, а также способы, которыми их можно устранить.
Основные неполадки квадрокоптеров и способы их устранения
1. Нет связи передатчика и квадрокоптера. Вероятнее всего ручка газа не стоит на положении минимум. Установите ее до упора на себя и не трогайте до тех пор, пока не будет завершена инициализация квадрокоптера.
2. Погас и/или не загорается индикатор на передатчике. Это означает, что батарейки полностью разрядились и необходимо их заменить на новые.
3. Система стабилизации квадрокоптера работает плохо или неправильно. Вероятнее всего были неправильно инициализированы начальные настройки. Посадите квадрокоптер на ровную поверхность и подождите некоторое время, после чего осуществите повторный взлет. Также на плохую работу стабилизации квадрокоптера оказывает влияние низкое напряжение от разряжающегося аккумулятора.
Основные неполадки квадрокоптеров и способы их устранения
4. При полетах квадрокоптера или запуске двигателей наблюдаются посторонние шумы и вибрация. Вероятнее всего имеются повреждения корпуса или пропеллеров.
5. Квадрокоптер не может оторваться от земли и взлететь. Такая ситуация наблюдается при неправильной установке винтов или двигатель. Внимательно проверьте маркировку каждого из них и сравните со схемой, которая приводится в руководстве пользователя вашей модели квадрокоптера.
6. Оказал двигатель. Проверьте провода, идущие к двигателю и контакты. Если с ними все в порядке, то двигатель сгорел и его необходимо заменить на новый. Также проблема может быть и более сложной и скрываться в регуляторе скорости и полетном контроле. Их также следует проверить и, при необходимости, заменить.
7. После того как квадрокоптер потерпел крушение, вал одного или нескольких двигателей вращаются со скрежетом и чрезмерным усилием. Аккуратно надавите на вал двигателя а, затем, потяните на себя. В том случае, если он продолжит работать неправильно, придется менять весь мотор.
8. После неудачной посадки или встречи с препятствием сдвинуты лучи. Скорее всего ваша модель квадрокоптера оснащена ударопоглощающей конструкцией и сдвинуть лучи в первоначальное положение следует руками, после чего необходимо нажать на соответствующие защелки.
Основные неполадки квадрокоптеров и способы их устранения
9. Не получается выполнить сложные фигуры в воздухе, в частности, кульбит. Скорее всего вам следует включить режим эксперта. Также проверьте уровень заряда аккумулятора – возможно квадрокоптеру просто не хватает мощности.
10. Квадрокоптер слишком чувствителен к командам, поступающим с пульта дистанционного управления, из-за чего полет получается резким, а управление не комфортным. Здесь, напротив, вам не хватает опыта управления, и режим эксперта следует сменить на другой, с более низкой чувствительностью управления.
11. Во время полета квадрокоптер постоянно сносит в одну из сторон. Эта проблема явно указывает на неправильную калибровку. Установите квадрокоптер на столе или любой другой ровной поверхности и подложите подкладку из нескольких листов бумаги или тонкий картон под тот луч, в сторону которого квадрокоптер отклоняется в полете. После того как калибровка будет произведена вновь, проблема должна исчезнуть.
12. Качество видео с квадрокоптера плохое. Во-первых, выбирайте модели квадрокоптеров с хорошей современной оптикой, а, во-вторых, используйте качественные карты памяти от известных производителей.
Источник
Rashvinta
RashVinta — программа, которая производит расчет параметров воздушного винта не только для квадрокоптера, но и других летательных аппаратов.
С помощью RashVinta можно делать вычисления с исходными данными, такие как:Мощность двигателя и диаметр винта;Мощность двигателя и частота вращения винта;Диаметр Винта и его шаг.
В первом случае устанавливаем флажок только на параметре «расчет по диаметру винта». Указываем информацию о размере пропеллера, мощность двигателя, скорость полета — максимальная и средняя. Жмем «Рассчитать» и видим параметры шага и частоту обращения пропеллера.
Во втором случае все отметки снимаются. Далее, как и в первом случае указываем исходную мощность двигателя, также не забываем про частоту вращения винта и скорость летательного аппарата, аналогично первому случаю. Жмем «Рассчитать» и видим все нужные данные по диаметру винта и его шагу.
В третьем случае расчеты производятся на профессиональном уровне. Галочкой отмечаем пункт «указать параметры винта». Параметры диаметра и шага винта вносим в нужные поля. Жмем «Рассчитать» и видим данные по профилю лопасти винта, его изображение появляется в окне.
В программе есть возможность увидеть профиль лопасти под углом наклона. Для этого отметьте галочкой пункт «Профиль с углом». И еще можно увидеть точки, который были использованы для расчета — отметьте галочкой пункт «показать расчетные точки». На принтере данное изображение профиля можно вывести на бумагу в проекции 1:1.
Балансировка пропеллеров с помощью подручных средств
Купленные дешевые пропеллеры не могут быть на 100% сбалансированными, только если это не оптовый сбыт фирменных пропеллеров. Такие пропеллеры негативно влияют на работу ВМГ, что вызывает дополнительные вибрации и вследствие чего появляется «эффект желе» при съёмках видео.
В данном случае потребует процедура балансировки реквизитов для квадрокоптера. Для её выполнения потребуется:
- винт;
- скотч;
- суперклей (если не нашелся скотч);
- наждачная бумага;
- балансир для пропеллеров (в данном примере рассматривается — Du-Bro Tru-Spin, или можно использовать китайские аналоги, как на видео);
Чтобы приступить к балансировке, установите устройство на ровной поверхности так, чтобы ось была выровнена по горизонтали.
Перед балансировкой лопасти необходимо проверить на отсутствие повреждений, затем установить на ось и немного отклонить в нужную сторону. Далее смотрим на горизонтальное положение пропеллера, удалось ли ему вернуться после отклонения. Если нет, то нужно облегчить более тяжелую лопасть (наждачной бумагой).
При повороте балансировочного станка, необходимо удостовериться, что пропеллер держит равновесие в таком положении. Подчеркнем, что все процедуры по утяжелению и облегчению лопастей необходимо производить с внутренней стороны (вогнутых).
Далее проделываем процедуру балансировки ступицы. Перемещаем пропеллер вертикально, и смотрим, если есть отклонения в одну сторону, то утяжелять нужно противоположенную. Утяжелять можно с помощью лака или суперклея. Достигаем баланса, меняем положение — переворачиваем, и удостоверяемся, что баланс достигнут и с другой стороны. На этом балансировка лопастей пропеллера закончена.
Вертикальное движение квадрокоптера
Для движения и управления в дронах используются винтовые двигатели. Вы можете подумать, что они похожи на вентиляторы, ведь принцип их действия один и тот же — вращающиеся пропеллеры толкают воздух вниз. Конечно, как известно каждой силе воздействия соответствует сила противодействия.
А значит с той же силой, с которой пропеллеры воздействуют на воздух, воздух воздействует на пропеллеры. Эта идея лежит в основе подъема аппаратов. Все сводится к контролю сил воздействия. Чем быстрее вращаются двигатели, тем выше поднимается аппарат, и наоборот.
Итак, в движении дрон может — парить, подниматься вверх и опускаться вниз. Для того, чтобы дрон парил необходимо, чтобы суммарная тяга всех четырех двигателей, поднимающих дрон, была равна силе тяжести, которая тянет его вниз. Это легко. Но что насчет того, чтобы поднять дрон выше?
После этого можно ненамного сбросить скорость, только нужно учитывать, что теперь на аппарат действую три силы: движущая сила тяги, сила тяжести и сопротивление воздуха. Поэтому тяга все равно должна быть несколько больше, чем при парении. Если необходимо снизить аппарат, то нужно делать противоположные вещи: нужно уменьшить тягу двигателей (скорость), чтобы равнодействующая сила уменьшилась.
Запчасти walkera
Покорение неба и тренировка навыков пилотирования всегда чреваты возможными поломками вертолета. Внешний вал для вертолета Walkera LAMA2-1 — HM-LM2-1-Z-07 и другие запчасти в ассортименте позволяют оперативно решать любые проблемы: от небольшого ремонта до сборки с нуля.
Самовывоз, Почта РФ, Курьером, Логистическая компания
Внешний вал для вертолета Walkera LAMA2-1 — H.
Самовывоз, Почта РФ, Курьером, Логистическая компания
Тип запчастей: другие запчасти и аксессуары, назначение: вертолеты
Самовывоз, Почта РФ, Курьером, Логистическая компания
Самовывоз, Почта РФ, Курьером, Логистическая компания
Крепление лопастей Walkera
Современные квадрокоптеры могут длительное время проводить в полете, поднимать солидный вес в виде дополнительной видеоаппаратуры и выполнять довольно сложные маневры. Плюс производители используют самые современные и надежные материалы для их сборки. Но, несмотря на вс.
Самовывоз, Почта РФ, Курьером, Логистическая компания
Запчасть для Walkera Vitus 320 — Vitus 320-Z-.
Тип запчастей: модули и датчики
Самовывоз, Почта РФ, Курьером, Логистическая компания
OSD-модуль Walkera 250-Z-25
Моторама Walkera по выгодной цене
Самовывоз, Почта РФ, Курьером, Логистическая компания
Покорение неба и тренировка навыков пилотирования всегда чреваты возможными поломками вертолета. Внешний вал для вертолета Walkera LAMA400Q — HM-LM400-Z-06 и другие запчасти в ассортименте позволяют оперативно решать любые проблемы: от небольшого ремонта до сборки с нул.
Самовывоз, Почта РФ, Курьером, Логистическая компания
Внешний вал для вертолета Walkera LAMA400Q -.
Самовывоз, Почта РФ, Курьером, Логистическая компания
Назначение: вертолеты, тип аккумулятора: Li-Po, емкость аккумулятора: 3000 мА·ч, диаметр: 0.08 см
Самовывоз, Почта РФ, Курьером, Логистическая компания
Тип запчастей: контроллеры, платы, количество: 1 шт., количество: 1 шт
Самовывоз, Почта РФ, Курьером, Логистическая компания
Приемник Walkera DEVO RX710
Самовывоз, Почта РФ, Курьером, Логистическая компания
Вал внешний Walkera
Самовывоз, Почта РФ, Курьером, Логистическая компания
Крепление лопастей Walkera
Самовывоз, Почта РФ, Курьером, Логистическая компания
Самовывоз, Почта РФ, Курьером, Логистическая компания
Самовывоз, Почта РФ, Курьером, Логистическая компания
Межлопастной вал Walkera
Современные квадрокоптеры могут длительное время проводить в полете, поднимать солидный вес в виде дополнительной видеоаппаратуры и выполнять довольно сложные маневры. Плюс производители используют самые современные и надежные материалы для их сборки. Но, несмотря на вс.
Источник
Использование компьютера.
Вы вероятно заметили, что каждое движение достигается за счет изменения скорости вращения одного или нескольких двигателей. Для этого требуется контроллер, который может увеличить или уменьшить напряжение, подаваемое на каждый двигатель. Настройка не так сложна.
Однако, если у вас есть система, с помощью которой можно управлять дроном, то все что от вас потребуется – нажать пальцем на джойстик, всю остальную работу выполнит компьютер. Акселерометр и гироскоп в беспилотном летательном аппарате помогут еще больше увеличить легкость и стабильность полета, помогая совершать небольшие корректировки мощности для каждого двигателя.
Как дроны поворачивают?
Допустим ваш дрон планирует и движется на север, вы же хотите развернуть его лицом к востоку. Как осуществить это движение, меняя скорость четырех двигателей? Прежде чем ответить, я нарисую схему, на которой будет изображен вид сверху на дрон, а его двигатели будут пронумерованы от 1 до 4.
На этом рисунке красные двигатели вращаются против часовой стрелки, а зеленые по часовой стрелке. Поскольку две пары двигателей вращаются в противоположных относительно друг друга направлениях, то их полный угловой момент равен нулю. Угловой момент, схож с линейным, и рассчитывается как произведение угловой скорости и момента инерции. Стоп!
Если на систему не действует крутящий момент (в нашем случае система – это дрон), то тогда полный угловой момент остается постоянным (то есть равен нулю). Чтобы упростить вам задачу договоримся, что красные двигатели, совершающие вращения против часовой стрелки, обладают положительным угловым моментом, а зеленые, совершающие вращения по часовой стрелке, обладают отрицательным угловым моментом. Значение для каждого будет 2, 2, -2, -2 и в сумме они дают ноль (я специально не указал единицы измерения).
Допустим, вы хотите повернуть дрон вправо. Я должен уменьшить угловую скорость двигателя 1, так чтобы его угловой момент стал -1. Если кроме этого ничего другого не происходит, то общий угловой момент системы становится равным 1. Такого быть не может, а значит дрон должен повернуться по часовой стрелке, чтобы его угловой момент стал -1. Бум! Он развернулся!
Но постойте! Уменьшение скорости вращения двигателя 1 действительно помогло повернуть дрон, но еще это уменьшило тягу этого двигателя. А значит движущая сила тяги не компенсирует силу тяжести, действующую на аппарат, и дрон начинает снижаться. А что еще хуже силы тяги двигателей тоже не сбалансированы, а значит дрон начнет заваливаться со стороны двигателя 1. Не переживайте. Я все исправлю.
Давайте повернем наш дрон, не создавая всех этих проблем. Для этого увеличим скорость вращения двигателей 1 и 3, и сократим скорость вращения двигателей 2 и 4. Полный угловой момент двигателей все еще не равен нулю, а значит дрон должен повернуться. Но поскольку движущая сила тяги двигателей компенсируют силу тяжести, воздействующую на дрон, то он продолжает парить.
Как найти потерянный квадрокоптер?
Если страшно потерять дрон, стоит принять превентивные меры. Защиту от потери беспилотника могут обеспечить нижеследующие действия.
Без GPS-трекера решить эту задачу, увы, бывает нелегко, но выход есть. Конечно, самый худший вариант, это если дрон улетел на дальнее расстояние. На его поиски уйдет немало времени.
Одной из причин исчезновения может быть банальная разрядка батареи. Квадрокоптер просто упал или совершил «экстренную» посадку неподалеку, и тогда нужно лишь следовать по его маршруту. Иногда не спасает даже трекер. Например, в лесу, да еще и на приличном расстоянии, он просто может перестать ловить сигнал.
Интересно:PowerEgg с емкой батареей редко теряется, потому что возвращается на точку взлета, когда пожелает его хозяин.
Если все же найти улетевший квадрокоптер не удалось, даже после исследования примерного маршрута, можно:
- Опубликовать пост о потере с описанием девайса на тематических форумах, на собственной страничке, в социальных сетях.
- Отслеживать информацию о продаже БУ девайсов на популярных досках объявлений. Возможно, удастся найти потерянную модель.
Совет — кроме производителя и названия модели, в объявлениях не помешает указать особые приметы дрона: наклейки, царапины и прочие индивидуальные знаки, которые помогут опознать именно этот аппарат. Хорошо, если есть недавнее фото. Пример заголовка объявления: Утерян Cheerson CX-10C оранжевого цвета с камерой и наклейкой с человеком-пауком.
Как проверить выход на мотор квадрокоптера, если не крутятся моторы?
Прежде, чем заниматься ремонтом, по причине того, что не крутятся моторы, необходимо точно убедиться, что неисправен именно выход на мотор на полетном контроллере, именно это мы сейчас и сделаем.
Метод проверки прост и основывается на измерении уровня напряжения на всех четырех выходах на полетном контроллере и проверки, совпадают ли они.
Контроллер полета управляет регуляторами оборотов с помощью сигнала PWM (протоколы Oneshot и Multishot) или цифрового сигнала DShot.Обратите внимание, что мультиметры не умеют понимать такие сигналы. Но они могут работать как фильтр нижних частот и преобразовывать эти сигналы в показания напряжения, простыми словами, когда вы будете менять уровень газа (стик throttle, который слева на пульте), будет меняться и показания напряжения.
В идеале, напряжение на всех четырех выходах должно быть одинаковым.
Теперь перейдите во вкладку Motor в Betaflight Configurator и переместите ползунок на 2000 (100%). Измерьте снова напряжение, оно должно возрасти после того, как вы поднимете ползунок:
Для аналоговых сигналов, таких как PWM, Oneshot, Multishot — напряжение должно быть примерно 1,5V, когда газ находится на уровне 1000 (0%), а у DShot на этой же отметке будет 0.2V.
Когда газ будет на уровне 2000 (100%), напряжение для аналоговых сигналов будет выше 3V, в то время как у DShot будет около 0.4V.
Точная цифра не имеет значения, смысл в том, чтобы все одни были одинаковы на всех выходах. Если один из выходов выдает другое значение, которое отличается от других — этот выход неисправен.
Также бывает, что после прошивки один моторперестал крутиться, хотя до прошивки работал корректно. Это может произойти по нескольким причинам:
- У вас разные ESC (да, лично мне китайцы прислали один регулятор с другой маркировкой, 3 c PRO, а один не PRO);
- Вы не сделали калибровку моторов с регуляторами.
Для первого пункта, необходимо пару раз перепрошить регуляторы оборотов, бывает, что нормально работать начинают только со 2 или 3 раза. Подробнее о прошивке по ссылке выше, в синей рамке.
По второму пункту: видите скрин выше, вкладка Моторы? Отключите аккумулятора, но при этом не отключайтесь от Betaflight, затем поднимите ползунок Master вверх. Регуляторы начнут проигрывать звуки, после того как закончат, подсоедините аккумулятор и резко переведите ползунок в нижнее положение. Регуляторы оборотов снова начнут издавать звуки.
Если мотор не начал крутиться, повторите эти два пункта. У меня это срабатывает, думаю дело в разных регуляторах.
Какие бывают размеры пропеллеров
Размер пропеллеров напрямую связан с тягой, отзывчивостью и тем, как он «цепляется» за воздух. Большой пропеллер будет проталкивать собой больше воздуха и будет тратить много энергии для вращения. Он будет затягивать изменение скорости вращения двигателей, потому что большой и тяжелый.
Пропеллеры малого размера быстрее реагируют на изменение скорости вращения двигателей. Они проталкивают через себя меньше воздуха, соответственно тратят меньше энергии при изменении скорости вращения. Небольшие пропеллеры ставят на гоночные квадрокоптеры, чтобы очень быстро менять скорость вращения двигателей, совершать быстрые падения, которые не получатся на больших пропеллерах из-за планирования и для быстрого изменения направления полета.
Пропеллеры должны соответствовать двигателям, потому что, если мы поставим 3-дюймовые пропеллеры на двигатель, который рассчитан на 5 дюймовые пропеллеры, то это приведет к чрезвычайно высоким оборотам и большому потреблению энергии из-за маленькой нагрузки от пропеллеров, при этом тяга будет небольшая.

Наиболее популярным пропеллером считается 5-дюймовы пропеллер, для которого подходят двигатели в диапазоне размеров 2204-2307.
Калькулятор ecalc
Для расчета винтомоторных параметров, при создании своих моделей беспилотных летательных аппаратов, есть очень удобный сервис — eCalc. Многие, кто собирает квадрокоптеры своими руками знают про этот онлайн калькулятор. Раздел, где приводятся параметры расчетов для квадрокоптеров, выглядит следующим образом.
Сперва может показаться, что всё понятно. Но следует знать о некоторых моментах, которые сильно влияют на результаты произведенных вычислений.
Первоначально, необходимо указать взлётный вес коптера. Если имеются подвесы и камеры, то их тоже нужно включить в этот параметр. Если сервис показывает Without Drive (что значит «без привода»), то нужно указать общий вес рамы, и вес других составных частей, таких как:
- пропеллеры;
- платы;
- контроллер;
- подвеса;
- камера;
- оборудование для FPV полетов.
Также необходимо прибавить к массе 10%, которую займут провода. На выходе получается искомая цифра полного взлетного веса квадрокоптера.
Указываем общее число роторов, по какой схеме они расположены — одиночной или соосной. Указываем верхнюю планку высоту полёта, погодные условия при полете — температура воздуха и атмосферное давление).
В выпадающем списке предлагается выбрать аккумулятор. При отсутствии нужной батареи, выбирайте ту что ближе подходит по токоотдаче и емкости. Далее, система завершит заполнение полей сама. Указываем вес и структуру батареи. При необходимости установить дополнительные АКБ, в текстовом поле P укажите их число. А в поле Weight указывается их суммарный вес.
Поле этого, в выпадающем списке указываем тип ESC, так называемый макс. ток этих регуляторов.
Указываем производителя моторов. В окне появляется его оценка. По показателям KV указывается нужный образец.
Теперь указываем параметры пропеллеров — тип, диаметр и шаг. По возможности, применяйте винт с максимально допустимым диаметром для данной рамы. Указывайте передаточное число, если у привода зубчатая трансмиссия. Количество зубьев направляющей шестерни к ведомой.
Если система не выдает нужных параметров, то можно указать в текстовом поле Custom. И там указать нужные параметры для расчета в калькуляторе. Имейте ввиду, что в одну ячейку указываются параметры батареи.
После заполнения всех полей, производится вычисления. На выходе вы получите необходимые данные. Они изображены в виде графиков, списков и циферблатов.
Конструктор не справился со флипом
Если сломался дрон, то посмотрите запчасти здесь
Беда самодельных собранных аппаратов в том, что пилот может неправильно рассчитать нагрузку на мотор. Собственно, из-за этого и произошел краш. Делая флип на большой скорости, двигатель не выдержал нагрузки и один из пропеллеров оторвался. В результате аппарат на огромной скорости врезался в землю, чудом не попав в пилота. Наверное того спасло движение вжатия головы в плечи.
Шаблоны Инстаграм БЕСПЛАТНО
Хотите получить БЕСПЛАТНЫЙ набор шаблонов для красивого Инстаграма?
Напишите моему чат-помощнику в Telegram ниже 👇
Вы получите: 🎭 Бесплатные шаблоны “Bezh”, “Akvarel”, “Gold”
Telegram Viber Vkontakte
или пишите “Хочу бесплатные шаблоны” в директ Инстаграм @shablonoved.ru
Шаблоны Инстаграм БЕСПЛАТНО
Хотите получить БЕСПЛАТНЫЙ набор шаблонов для красивого Инстаграма?
Напишите моему чат-помощнику в Telegram ниже 👇
Вы получите: 🎭 Бесплатные шаблоны “Bezh”, “Akvarel”, “Gold”
Telegram Viber Vkontakte
или пишите “Хочу бесплатные шаблоны” в директ Инстаграм @shablonoved.ru
Конфигурация пропеллеров
Пропеллеры бывают:
- 2-лопастные;
- 3-лопастные;
- 4-лопастные;
- 5-лопастные.

Конфигурация пропеллера это то, сколько лопастей у пропеллера. Самым эффективным будет однолопастной пропеллер, но его физически нельзя использовать из-за дисбаланса.
Увеличение числа лопастей компенсирует размер пропеллера, особенно в микросборках, ведь если на маленький дрон на раме 100 мм поставить 2-лопастные пропеллеры, он вряд ли будет адекватно летать и это приведет к большим оборотам двигателей и их перегреву. Именно поэтому в микросборках всегда 4-лопастные пропеллеры, а в дронах чуть больше — 3-лопастные.
Из-за сложной физики и аэродинамики увеличение количества лопастей не так эффективно, как увеличение размера. Винт с удвоенным количеством лопастей не будет работать так же хорошо, как винт с удвоенным размером, но он обеспечивает большую тягу за счет большей мощности.
Увеличение количества лопастей приведет к увеличению тяги и сцепления в воздухе за счет отзывчивости и увеличения потребляемой энергии. Если проектируется дрон, на котором вы будете совершать много постоянных и резких изменений направления в полете, то нужны пропеллеры с увеличенным количеством лопастей.
Меньшее количество лопастей предпочтительнее, если требуется более быстрый отклик двигателя, а тяга не так важна. Серьезные гонщики с современными сверхлегкими гоночными рамами довольно часто используют 2-лопастные пропеллеры, потому что рама настолько легкая, что требуемая тяга намного меньше, и, следовательно, может быть реализован более быстрый отклик легких и менее «тянущих» пропеллеров.
В наиболее распространенной категории 5 дюймовых пропеллеров принято считать, что пропеллеры с тремя лопастями обеспечивают наилучший баланс эффективности, тяги и сцепления.
Есть один момент, который многие упускают из вида — это долговечность. Во время полетов, особенно если пилот начинающий, будет очень много аварий и падений, поэтому пропеллеры станут расходным материалом. Но если использовать 2-лопастные пропеллеры, то ломаться они будут меньше.
Кратко: устройство квадрокоптера
Чтобы понимать, с каким оборудованием вы имеете дело, уделим внимание конструкции квадрокоптера. Схему работы беспилотников понять не сложно. Все аппараты работают с помощью роторов, создающих диагональное вращение в противоположные стороны. Сами роторы оснащены управленцами, которые собирают сведения с гироскопов и отправляют их обратно.

Самые продвинутые модели оснащены десятками датчиков и чувствительных сенсоров, а сбором информации в таких устройствах занимаются компьютеры. При этом все модели работают с помощью роторной системы: каждая пара винтов оснащена бесколлекторным двигателем. Всего имеется 4 винта; 2 из них крутятся по часовой стрелке, остальные – против часовой.
Важную функцию выполняет акселерометр: он обеспечивает коптеру горизонтальное положение в воздухе. Удерживает устройство на заданной высоте бародатчик. Движение квадрокоптера будет правильным только при одинаковом вращении винтов. Если один из моторов меняет скорость вращения, аппарат кренится в сторону неисправных винтов и продолжает лететь горизонтально.
Материал пропеллеров
Чаще всего в магазинах вы покупаете пропеллеры из поликарбоната, он пластичный и прочный. Еще есть пропеллеры из АБС-пластика, это тоже очень прочный пластик, но более хрупкий. Отличие от поликарбонатных пропеллеров в том, что при ударе лопасть из АБС-пластика скорее всего сломается, а из поликарбоната просто погнется, причем эту лопасть можно выпрямить, но это чревато возникновением вибрации из-за нарушенной балансировки.
Есть еще пропеллеры из пластика, который армирован стекловолокном, это очень жесткие пропеллеры, но в тоже время при сильном ударе ломаются.
Выбор материала пропеллеров зависит и от времени года. Пластмассы для пропеллеров термопластичны, то есть, их жесткость и пластичность зависит от температуры. Если вы летаете зимой, то лучше ставить пропеллеры из АБС-пластика, так как поликарбонат на холоде дубеет и становится хрупким.
Универсальными пропеллерами считаются пропеллеры из поликарбоната.
Как отличить поликарбонатный пропеллер от АБС-пластика? Первый относительно прозрачный, второй совсем нет:
Методы установки
Есть разные способы установки винтов на квадрокоптер. Зачастую вал электромотора — это ничто иное, как металлический штырь. Без каких-либо вспомогательных элементов для установки винта. Для таких случаев используют цанговые зажимы и пропсейверы — это специальные переходники.
При создании своих моделей квадрокоптеров, удобно использовать пропсейверы (см. на фото) Пропсейвер похож на втулку. В боковой части поверхности имеются по одному отверстию с каждой стороны, выполненных симметрично. Такая конструкция устанавливается на вал, и затягивается винтами. Далее пропеллер нужно надеть на вал и закрепить нейлоновыми стяжками, также есть вариант крепления резиновыми кольцами.
Цанговый зажим является более надежным, по сравнению с пропсейвером. Его конструкция построена конусообразной втулкой с резьбовым соединением. Сначала на вал устанавливается цанга, затем идет зажимная втулка с пропеллером и шайбой. Весь переходник закрепляется коком — гайкой, особой формы.
На моторах класса Outrunner, где ротор бесколлекторного электродвигателя находится с внешней стороны, в верхней части конструкции присутствует несколько отверстий, предназначенных для установки различных типов переходников и креплений.
Компания DJI, при производстве своих квадрокоптеров на бесколлекторных моторах, устанавливают самозатягивающиеся гайки. Резьба на валах такого типа двигателей, роторы которых вращаются в противоположенную сторону.
Не вращается один или несколько двигателей
Более сложной, но не безнадежной, является ситуация, в которой при запуске беспилотника один или несколько моторов не включаются. Обычно такая ситуация характерна для коллекторных двигателей, не отличающихся высокой надежностью.
Впрочем, может быть дело не в движке, а в банальном обрыве провода или в плохом контакте. Провода нередко рвутся после неудачных приземлений, тогда как контакты могут окислиться под воздействием влаги.
Внимательно осмотрите неработающий двигатель и провод, идущий к нему. Если визуально неисправности не обнаружены, можно прозвонить электроцепь движка. Если и прозвон ничего не дал, тогда нужно проверять сам электродвигатель. Возможно, имело место короткое замыкание, либо же обрыв случился внутри корпуса. Сгоревший двигатель иногда можно опознать визуально.
В случае с бесколлекторными двигателями поломка может объясняться неисправностью электроники. Если не запускается бесколлекторный движок, то, скорее всего, из строя вышел электронный регулятор скорости (ESC). Подключите к исправному мотору тот ESC, который необходимо проверить.
Не работает винт квадрокоптера
Преимущества нашего сервисного центра:
- Ремонт любой сложности
- Срочный ремонт от 23 минут
- Выезд курьера и бесплатная доставка
- Оригинальные комплектующие AAA класса
- Гарантия на все работы и запчасти
Предоставляем скидку 10% при заказе с сайта!
Квадрокоптеры используются во многих сферах жизни. Однако особую популярность они завоевали в качестве устройств для видеосъемки. Дроны лишены твердого сцепления и имеют до 12 винтов, расположенных в одной плоскости. Эти составляющие предоставляют прибору лучшую маневренность и высокую подъемную силу. Такая конструкция без лишних воздушных атрибутов имеет малый расход энергии и удобную массу.
Управление современными квадрокоптерами напоминает навигацию в компьютерной игре с использованием джойстика и кнопок. Хотя для полета выше 50 метров рекомендуется иметь навыки, которые позволят рассчитать создающую помехи во время управления силу ветра. Однако и опытные пилоты не всегда в силах уберечь аппарат от негативных последствий неудачного полета.
Пластик и карбон: где качество и эффективность
Пластиковые пропеллеры пользуются большей популярностью. Их отличительные черты это:
- пластичность;
- низкая цена;
- большой выбор ассортимента;
- доступность;
Также стоит отметить, что более гибкие лопасти имеют повышенную устойчивость к деформациям при ударах о препятствие, но вместе с тем, имеются погрешности в балансировке.
На рынке также представлены карбоновые лопасти. Карбоновые винты высоки в цене, но обладают рядом положительных критериев:
- прочность;
- эффективность;
- лёгкость;
Также на рынке представлены гибридные пропеллеры из пластика и углеродного волокна. Второй обычно усиливает первый. Пропеллеры такого типа дешевы в цене и не уступают по качеству и жесткости чисто карбоновым.
Под качеством реквизитов понимают то, насколько правильно они изготовлены. Правильное изготовление пропеллеров обеспечивает хороший баланс во время полёта и не создают дополнительную вибрацию ВМГ. Бренды, которые производят лучшие пропеллеры для квадрокоптеров и других летательных аппаратов — это GWS. Также еще рекомендуют APC, которую производят американцы, и EMP с большим ассортиментов товаров, не только реквизитов.
Повышенный шум работы и нестабильный полет
Если коптер издает повышенный шум и неожиданно заваливается набок при полете, следует проверить состояние лопастей. Они деформируются и повреждаются при столкновении с преградами или грубой посадке. Коптер нужно выключить и внимательно осмотреть пропеллерные блоки.
Совет! Повреждение лопасти удобно определить, если расположить общую поверхность пропеллеров на уровне глаз.
Выпуклая форма лопасти означает, что она перестает создавать надлежащую подъемную силу. Это особенно заметно в полете, при повышенных оборотах двигателя. Пропеллер можно аккуратно выровнять или установить вместо него запасной.
В моделях коптеров, оснащенных редуктором, проблема повышенного шума может быть связана как с загрязнениями, так и физическими повреждениями. Внутри коробки преобразования оборотов расположена система шестерней. При недостатке смазки, попадании внутрь возникает повышенный шум.
Послушайте какие звуки издает неработающий мотор
Когда вы включаете (подсоединяете аккумулятор) квадрокоптер, моторы проигрывают стартовые звуки, они настраиваются при прошивке в BL_Helli, подробнее ниже:
Как прошить полетный контроллер и ESC BLhelli. Прошивка квадрокоптера
Как только вы подключите аккумулятор, проиграет мелодия, которую вы выбрали при прошивке, а после этого будет 3 коротких сигнала «пи-пи-пи». Это значит, что ESC (регуляторы оборотов) и моторы получают питание.
Пару секунд спустя, должны издаться еще 2 сигнала, но уже более длинных — «пииии-пииии», это значит, что ESC получают корректный сигнал газа от полетного контроллера.
Если вы слышите только первые 3 коротких сигнала, но не услышали вторые 2 сигнала, значит проблема с полетным контроллером, а это скорее всего уже проблема с выходами на портах.
Что нужно проверить:
- Цел ли сигнальный провод двигателя?
- Не замкнут ли контакт двигателя, который расположен на полетном двигателе, на землю? Для проверки возьмите мультиметр и в режиме прозвонки, проверьте контакт.
Проблема в электронике
Востребованность таких летательных аппаратов привела к расширению рынка запчастей. Найти необходимую на модель не составляет труда, как и отыскать мастера, способного обслужить такой летательный аппарат. На полки поставляются не только составные элементы конструкции квадрокоптера.
Но и целые блоки, как к примеру двигатель. Преимущество полной замены в том, что можно по желанию увеличить мощность агрегата, тогда игрушка будет дальше и быстрее летать. Заменить старый двигатель на новый не так сложно, но при отсутствии необходимых навыков стоит обратиться к специалисту, чтобы не повредить электронику.
Это вторая основная поломка квадрокоптера – электроника. Пострадать во время эксплуатации может не только аккумуляторная батарея, но и соединительные провода. Они так же легко заменяются на новые.
Если никаких проблем с проводами, двигателем выявлено не было, возможная причина поломки может скрываться в пульте управления. Чаще всего устранить поломку удается простой заменой батареек, но когда это не помогает, она скрыта внутри конструкции. Платы, контакты и провода со временем могут приходить в негодность. Их и осматривают мастера в поисках главной причины, почему квадрокоптер не летает.
В самом конце статьи мы предлагаем посмотреть наши ролики, которые помогут в 80% случаев. Спойлер – неправильно установлены лопасти на дроне.
Работа моторов
Неполадки в работе моторов – основная причина, почему винты перестают крутиться. Моторы требуют к себе осторожного обращения. Их нельзя резко трясти, чтобы не повредить внутренние механизмы.
В мотор могут попасть частички бытового мусора, волосы, листья, стебли растений. Засор легко удаляется пинцетом. Производители рекомендуют снять пропеллеры, чтобы не повредить их при чистке мотора.
Триммирование тоже может помочь, так как от мощности мотора зависит скорость вращения пропеллеров. (Подробно об этой процедуре должно быть написано в инструкции).
Мотор может перестать работать из-за резких движений или аварии. Выход из такой ситуации зависит от модели дрона. На некоторых беспилотниках можно заново подключить двигатель с помощью бортового компьютера. Есть модели, которые нужно разбирать, а затем вручную подключать моторы.
Однако пользователи должны помнить о возможных последствиях такого вмешательства, поскольку это может снять беспилотник с гарантии. Все зависит от места покупки, поэтому важно читать сопроводительные документы к квадрокоптеру.
Схема установки пропеллеров
Прежде, чем устанавливать пропеллеры на квадрокоптер, вам нужно узнать, в правильную ли сторону будут крутиться моторы. Большинство квадрокоптеров летает на конфигурации Multiwii, выглядит она вот так: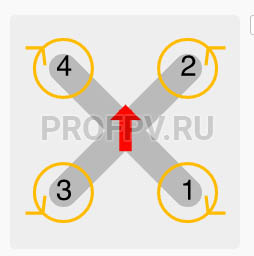
Красная стрелка — это направление, куда будет лететь квадрокоптер, то есть вперед. Желтые стрелки — направление вращения пропеллеров. Можно легко запомнить в какую сторону какой двигатель крутится: два передних мотора крутятся в сторону камеры, а два задних мотора крутятся от камеры (передние внутрь, задние наружу).
Увеличение дальности управления квадрокоптером
Существует несколько способов увеличить дальность управления беспилотником. О них расскажет таблица.
Что установить | |
|---|---|
| Промежуточный усилитель сигнала | Устанавливается на пульт квадрокоптера. Для большинства моделей стандарт мощности пульта ДУ — показатель в 10 мВт. С дополнительным усилением показатель повышается до 1-1,5 Ватта, что позволит управлять дроном на расстоянии до 8 км. |
| Модуль LRS | Еще один компонент для апгрейда пульта ДУ, который после установки обеспечивает прирост показателя дальности с 1 км до 3-5 км. |
| Аккумулятор получше | Автономность — немаловажный фактор при солидных дистанциях. Без дополнительных источников питания или замены батареи более емкой альтернативой достичь желаемого результата не удастся. |
| Видеопередатчики | Помогут увеличить дальность видеосигнала. |
В тему: 16 уникальных способов применения квадрокоптеров
Найти улетевший квадрокоптер — нелегкая задача, поэтому лучше вообще его не терять. Чтобы не дать такой ситуации случиться, можно принять защитные меры: проводить калибровку, вовремя заряжать аккумулятор или приобрести дополнительный. Можно установить GPS-трекер: если дрон все-таки улетел, но батарея еще не села, есть шанс отыскать пропажу. Еще можно увеличить дальность управления, чтоб уже наверняка.
Шаг пропеллера
Шаг — это угол наклона каждой лопасти пропеллера.
Шаг это то расстояние, которое пройдет пропеллер вверх за 1 оборот в идеальных условиях.
Высокий шаг приводит к большей тяге и максимальной конечной скорости, но маленькому крутящему моменту на низких скоростях. Для сравнения представьте пятую скорость в автомобиле, здесь тоже самое, тронуться на 5 передаче вы не сможете, а вот развить еще большею скорость уже будучи на ней — да.
Пропеллер с большим шагом будет медленно реагировать на газ, потреблять больше энергии и будет максимально эффективным на больших оборотах.
Высокий шаг применяется в пропеллерах для съемочных квадрокоптеров.
Низкий шаг обеспечивает большой крутящий момент на малых оборотах, но у него небольшая тяга и максимальная конечная скорость. В автомобиле это первая и вторая передачи. Двигатель с таким пропеллером будет быстро реагировать на изменение уровня газа, дрон будет очень отзывчивым.
Низкий шаг применяется в пропеллерах для гоночных дронов (мини и микро).
Идеальными пропеллерами для гоночных мини квадрокоптеров считаются пропеллеры с шагом от 4 до 4,5 дюймов, они сочетают в себе хорошую чувствительность, крутящий момент, максимальную скорость и тягу.



