

- Как понять что ваш дрон попал под глушилку?
- Dji mavic 2 zoom smart controller
- Dji mavic mini
- Dji mavik air 2
- Dji spark
- Eachine e58 wifi fpv 2 mp
- Fimi a3
- Hubsan x4 h501s
- Mjx x101
- Mjx x102-h
- Ryze tech tello
- Syma x8hg
- Виды рэб-пушек в россии
- Вмешательства в работу компаса
- Если калибровка подвеса и imu не помогло?
- Как калибровать квадрокоптер syma
- Как стать гонщиком квадрокоптера? понравится ли мне летать по fpv?
- Настройка ралли-точки
- Пример полета
- Неожиданные ошибки включая failsafes (защита отказа)
- Ошибка: «недостаточно силы/esc» и «максимальная достигнутая нагрузка»
- Подробности сообщений (конкретно для apm arducopter)
- Проблемы системы питания (угасание и прочие)
- Просмотр содержимого
- Самый быстрый квадрокоптер в мире
Как понять что ваш дрон попал под глушилку?
Прежде всего по исчезновению спутников. В случае подмены – сначала исчезают настоящие и появляются поддельные. Также в случае подавления GPS. Спутники могут исчезнуть на определенной высоте.
Как только почувствовали неладное – не нужно ждать, что все станет хорошо. Скорее всего не станет. Начинайте снижение. Поскольку значительная часть глушилок работает начиная с высоты 30 метров (а верхняя граница неизвестна), не стоит пытаться взлететь выше и ближе к спутникам.
Если приземлиться получилось, не стоит взлетать снова. Второй раз может не получиться.
С электромагнитными генераторами сложнее, так как работают они прицельно, включаются не надолго. Благо, что их пока не очень много. Кроме того за работу генераторов часто принимают различное промышленное оборудование, влияние ЛЭП, электростанций и прочего.
Стоит внимательнее выбирать место, откуда взлетает дрон и куда придется садиться. Если Вы поднимаетесь через небольшое окно между деревьями – посадить дрон туда же в случае нештатной ситуации будет под силу далеко не всем.
Полеты в центре Москвы (да и других крупных городов) тоже так себе затея. В последнее время стоит также остерегаться и больших парков типа Поклонной горы, Царицыно и пр.
Изучите местность. Проверьте наличие различных государственных ведомств, заводов и прочих “нехороших” объектов. За основу стоит взять народные карты типаwikimapia.org – там больше данных, чем на “причесанных” Яндекс картах.
На некоторых форумах советуют снимать ограничения No Fly Zone, в таком случае коптер не пойдет сразу на посадку если вы попали под глушилку которая подменяет координаты, но так вы лишаетесь гарантии и в случае полета в запрещенном месте или аэропорту вы получите неплохой штраф или .
Если дрон еще на земле не видит больше 6-и спутников (в наше время с Глонасс и GPS их должно быть намного больше), не стоит взлетать вообще в надежде, что они появятся.
Тренируйте навыки полета без GPS. Купите игрушку или соберите недорогой FPV дрон для оттачивания навыков ручного управления и реакции без электронных помощников.
При возможности купите GPS трекер с сим-картой и установите на дрон. Он может помочь найти коптер, если он все таки улетит в неизвестном направлении.
Наше видео советы как бороться с глушилками?
Dji mavic 2 zoom smart controller
Квадрокоптер на четыре винта легко переносить и брать в поездки. Трёхосевой фирменный подвес обеспечивает плавную съёмку. Имеется разъём для подключения карты памяти.
Управление выполняется с пульта ДУ. Имеется возможность пользоваться VR-очками DJI Goggles.
Конструкция беспилотника обеспечивает ряд высоких показателей: наивысшую скорость полётов, высокую надёжность, отличную аэродинамику.
Обратите внимание! Камера оснащена зум-объективом с 4-кратным приближением. Кроме того, она поддерживает цифровое увеличение фото, настройку фокусировки, выдержки.
Технология HDP обеспечивает получение качественных кадров даже при слабом освещении.
Пульт эргономичной конструкции, портативных размеров. Совместно с пультом используются новые модели смартфонов.
Система видеотрансляции Ocu Sunc 2.0 обеспечивает стабильную связь между дроном и контроллером. Видео 1080р передаётся с расстояния до 8 км.
Батарея ёмкостью 3850 мАч. Нахождение в воздухе – 31 мин.
Технические характеристики:
- вес – 905 г;
- скорость – 72 км/ч;
- высота – до 500 м;
- радиус полёта – 8 км;
- допустимая скорость ветра – 38 км/ч.
Функции и режимы полёта:
- улучшенный режим автопилота;
- полёт через препятствия;
- FlightAutonomy – точное распознавание предметов;
- Quic Shot – создание клипа в один тап.
В функционале беспилотника шесть стандартных режимов интеллектуальной съёмки.
Новый режим Dolly Zoom автоматически изменяет фокусное расстояние объектива во время полёта.
Камера выполняет вертикальную, горизонтальную, сферическую панорамную съёмку.
Плюсы:
- продолжительный полёт;
- отличное качество снимков;
- хороший функционал;
- технология Apas.
Минусы:
Dji mavic mini
Непростой квадрокоптер, длина в сложенном виде – 14 см, вес – 249 г.
Камера 12 Мп с CMOS-матрицей делает фото до 4000×3000 пикс, видео – 2К, Full HD.
Трёхосевой механический стабилизатор обеспечивает плавность съёмки. Видео сохраняется на карте microSD.
Управление дроном выполняется со смартфона и складного пульта. Пульт управления использует Wi-Fi-соединение, сигнал передачи и осуществляет HD-трансляцию на расстояние до 4 км.
Для смартфона используется приложение DJI Fly. Батарея питания ёмкостью 2400 мАч, зарядка – 90 мин. Время работы – 30 мин. Скорость – до 47 км/ч.
Технические характеристики:
- дистанция передачи сигнала – до 4 км;
- спутниковая навигация.
Функциональный набор включает режим Quick Shot с известными предустановками:
- взлёт вверх;
- облёт вокруг объекта;
- полёт назад и вверх;
- спираль вверх.
Плюсы:
- продолжительная работа;
- быстрая зарядка;
- качественная съёмка;
- набор режимов;
- два варианта управления.
Минусов нет.
Беспилотник DJI Mavic Mini – хороший выбор без необходимости регистрации аппарата.
Dji mavik air 2
Профессиональная модель квадрокоптера с четырьмя винтами. Лучший вариант в категории моделей с доступными ценами. Продолжительность полёта — 34 минуты.
Вес 0,57 кг – необходима регистрация. Камера снимает видео в разрешении 4К. Замедленная съёмка в режиме 8К, скоростное видео при разрешении 1080р. Коптер улетает на расстояния до 18,5 км.
Важно! Безопасность полёта гарантирует система датчиков для обнаружения препятствий, спутниковые системы, автопилот. Данные полёта отражаются во встроенной карте памяти.
Управление осуществляется с пульта или посредством приложения DJI FLy для смартфона.
Встроенный аккумулятор ёмкостью 3500 мАч, время зарядки – 50 мин.
Беспилотник работает в режимах:
- активное отслеживание предметов;
- подъём и спуск на автомате;
- облёт намеченных объектов;
- возвращение к месту взлёта.
Характеристики:
- высота – 4 км;
- скорость – 19 м/с;
- дальность управления – 6 км;
- радиоканал.
Плюсы:
- масштабная дальность;
- отличное видео;
- складная конструкция;
- автопилот APAS;
- надёжная система связи OcuSync 2.0.
Минусы:
- большой вес;
- слабые лопасти;
- высокая цена.
Аппарат занимает первые места в рейтингах квадрокоптеров 2023 года.
Dji spark
Квадрокоптер с компактными габаритами за счёт складных лопастей. На приборе установлена камера с 2-осевым подвесом. Позади подвеса имеется вторая (посадочная) камера, слот для карты памяти.
Главная камера – 12 Мп. Её возможности позволяют снимать не только ландшафты, но и делать селфи на их фоне. Видеозапись в Full HD выполняется при скорости 30 к/с.
Управление коптером осуществляется несколькими способами:
- жестами;
- со смартфона через программу DJI GO4;
- с телефона, связанного с аппаратурой управления.
Справка! В устройство заложена система FlightAutonomy для более точного выполнения полётов.
Мини-коптер получает питание от батареи на 1480 мАч, время полёта – 16 мин. Перезарядка – 50 мин.
Бесколлекторные моторы обеспечивают устойчивость дрона при порывах ветра.
Характеристики:
- вес – 300 г;
- размеры – 14,3×14,3×5,5 см;
- скорость – 50 км/ч;
- высота – до 4 км;
- радиус передачи сигнала Wi-Fi – 100 м;
- разрешение видео – 1080р.
Функциональные возможности:
- мягкое управление для плавной съёмки;
- съёмка в движении;
- автовыбор места для лучшего кадра;
- предварительные установки для снятия кадра.
Преимущества:
- набор интеллектуальных режимов;
- несколько способов управления;
- хорошие лётные показатели;
- высокий уровень видеосъёмки.
Недостатки:
- отсутствие 4К камеры;
- быстро разряжается аккумулятор.
Многофункциональная модель, оправдывающая свою цену. Отлично подходит для съёмки и селфи.
Eachine e58 wifi fpv 2 mp
Складной дрон для обучения новичков. Встроенная камера 3 Мп с регулируемым углом наклона. Угол обзора — 120о, максимальное разрешение видео — 720р. Видео заносится в карту памяти или передаётся на смартфон. Качество съёмки оптимальное.
Шестиосевой гироскоп удерживает позицию дрона и уберегает съёмку от искажений. Аккумулятор ёмкостью 500 мАч, период зарядки – 70 мин.
Квадрокоптер умеет автоматически взлетать и приземляться, переворачиваться, удерживать высоту, возвращаться к пилоту в любом положении, летать по намеченному маршруту.
Беспилотник управляется с пульта управления или смартфона.
Технические показатели:
- время полёта – 9 мин;
- дальность радиосвязи – 100 м;
- камера – 3 Мп;
- вес – 99 г;
- дальность передачи видео – 30 м.
Функциональность: возврат одной кнопкой, система FPV, управление через радиоканал или Wi-Fi.
Плюсы:
- 3 скоростных режима;
- трюки одним нажатием;
- удержание высоты;
- автовзлёт и автопосадка.
Минусы:
- слабый сигнал FPV;
- хрупкие винты;
- нестабильность полёта при ветре.
Eachine E58 считается одним из лучших дронов в низкой ценовой категории до 10 000 руб.
Fimi a3
Портативный квадрокоптер с использованием аналогового FPV. На корпусе имеется DIY-порт с шестью контактами для светодиодной подсветки, электронного запала фейерверков.
Видеосъёмка выполняется 8 Мп Full HD-камерой с CMOS матрицей Sony 1/3.2 дюйма.
Видео с разрешением 1080р сохраняется на карту microSD. Камера монтируется на 2-осевой карданный подвес, стабилизация производится электронным способом по 3 осям.
Полёт от первого лица (FPV) осуществляется на аналоговой частоте через 40-канальный передатчик. Картинка онлайн передаётся на дисплей пульта управления. Максимальное удаление камеры – 1 км.
Беспилотником управляют с помощью пульта со встроенным FPV-экраном.
Ёмкость батареи питания – 2000 мАч. Полёт на одном заряде – до 25 минут.
Технические характеристики:
- вес – 560 г;
- скорость – 64 км/ч;
- высота – до 500 м;
- выдерживает ветер до 4 м/с.
Полётные режимы:
- GPS – макс. стабилизация полёта, скорость – 36 км/ч;
- SPORT – скорость 64 км/ч;
- ATTI – включается при потере GPS-сигнала.
Смарт-режимы:
- «Следуй за мной»;
- круговой облёт заданного пункта;
- полёт по одной линии с одной скоростью;
- движение без учёта ориентации дрона.
Плюсы:
- дисплей на пульте;
- масса режимов;
- камера со стабилизацией;
- аналоговый FPV.
Минусы:
- массивное зарядное устройство;
- плохая видимость на солнце.
Hubsan x4 h501s
Профессиональный квадрокоптер для гоночных соревнований. Имеет отличные лётные показатели: мощность, высокую скорость до 60 км/ч, специальные шасси.
Пульт с дисплеем позволяет просматривать полёт от первого лица в HD-качестве.
Имеется три варианта оснащения: эконом, стандарт, улучшенный, отличающиеся по длительности полёта и радиусу управления.
Камера передаёт картинку с расширением 1080 р. Изображение транслируется на дисплей пульта онлайн. Видео сохраняется в карте памяти.
Программное обеспечение для управления со смартфона обновляется на сайте производителя. Пульт – стандартный контроллер со встроенным FPV-модулем и LED-экраном.
Коптер оснащён GPS, функциями Follow mc и Headless mode.
Батарея ёмкостью 2700 мАч обеспечивает 20 мин полёта, заряжается 3,5 часа.
Технические показатели:
- вес – 410 г;
- радиус управления – 300 м;
- карта памяти.
Режимы:
- заданное направление;
- возврат в исходную точку;
- для новичков;
- «Удержание высоты»;
- «Следуй за мной».
Плюсы:
- GPS-модуль;
- камера высокого качества;
- надёжность;
- устойчивость к ветру.
Минусы:
Отзывы владельцев: лучший квадрокоптер для новичков.
Mjx x101
Крупные габариты квадрокоптера не позволяют использовать его для полётов в помещении. Традиционная конструкция с 4 винтами.
Предусмотрен подвес для камеры, которая отсутствует в базовой комплектации, амортизирующие подушки. На подвесе можно установить современные экшен-камеры разного ценового диапазона.
Видеосъёмка доступна на экране смартфона.
Внимание! Осевой стабилизации нет, поэтому камера в полёте наклоняется вместе с дроном.
Приложение для управления прибором подключается к каналу устройства через Wi-Fi. Кроме мобильного устройства, видео сохраняется на карте памяти аппарата.
Батарея ёмкостью 1200 мАч, заряда хватает на 10 мин полёта.
Характеристики:
- вес – 420г;
- зарядка – 2,5 часа;
- радиус полёта – до 100 м;
- скорость – 14,4 км/ч;
- З режима работы;
- пульт ДУ.
Квадрокоптер имеет возможность работать в трёх режимах мощности: низком, среднем, высоком.
Встроенная функция Headless делает управление более удобным. Имеется опция работы одной кнопкой. Wi-Fi позволяет транслировать видео на экран смартфона.
Дрон выдерживает порывы ветра средней интенсивности.
Плюсы:
- видеосъёмка высокого качества;
- высокая грузоподъёмность;
- устойчивость против ветра.
Минусы:
- отдельная покупка камеры;
- потеря скорости при установке камеры;
- слабая стабилизация, нечёткое изображение.
Бюджетный мультикоптер с отличными полётными данными. Понравится начинающим пилотам и мастерам вождения БПЛА.
Mjx x102-h
Квадрокоптер Х-образной формы выполнен из прочного пластика с лаковым покрытием красного цвета. Камера не входит в базовый комплект поставки. Беспилотник оснащён подвесом для крепления разных моделей современных экшен-камер.
Для управления дроном с мобильного устройства используют специальное ПО, скачиваемое с сайта производителя.
В комплекте удобный пульт ДУ с креплением для смартфона.
Надёжная связь через 4-канальный передатчик позволяет летать на расстояния до 100 метров. Выносная батарея ёмкостью 1200 мАч. Хватает на полёт в течение 11 мин. Зарядка длится 3 часа.
Технические характеристики:
- вес – 430 г;
- скорость – 40 км/ч;
- дальность полёта – 100 м;
- совместимые камеры GoPro, MJX, C4016;
- шестиосевой гироскоп, барометр.
Функционал:
- взлёт, приземление, остановка, возврат – одним нажатием;
- удержание высоты;
- Headless mode;
- 3D-повороты во всех направлениях;
- FPV.
Плюсы:
- бюджетный квадрокоптер;
- достаточная грузоподъёмность;
- ёмкий аккумулятор;
- хорошая скорость;
- набор режимов.
Недостатки:
- малая скорость приземления;
- трудности со связью на большой высоте.
Ryze tech tello
Селфи-дрон оборудован четырьмя винтами с защитными бамперами. Лёгкое управление понравится и новичкам и пилотам-любителям.
Ёмкость батареи – 1100 мАч на 13 минут полёта. Зарядка длится 1 час.
Квадрокоптер сочетается с VR-очками и геймпадом. Камера 5 Мп производит видеозапись в разрешении 1280×720. Изображения хорошего качества. Кроме передней, имеется нижняя камера.
Вся информация поступает на планшет. Управление выполняется с помощью мобильного приложения.
При разрядке батареи беспилотник аккуратно приземляется.
Технические показатели:
- вес – 80 г;
- скорость – 8 м/с;
- макс. высота – 10 м;
- дальность связи – 100 м;
- электронный стабилизатор.
Функционал: автовзлёт/автопосадка, онлайн-передача видео на мобильное устройство.
Режимы работы: подкидывание, перевороты, запись видео при движении вверх и назад; панорамная съёмка.
Плюсы:
- небольшие размеры;
- простое управление;
- качественное изображение;
- несколько режимов полёта.
Минусы:
- неустойчивость к ветру;
- отсутствие встроенной памяти;
- малая дальность полёта.
Syma x8hg
Недорогая модель квадрокоптера для новичков пилотирования. Аппарат оснащён встроенным барометром и улучшенной видеокамерой 8 Мп.
Дрон выделяется оригинальным дизайном и яркой цветовой гаммой. Конструкция представлена прочным корпусом с четырьмя винтами.
Светодиодная подсветка зелёного и красного свечения. Камера входит в базовую комплектацию.
Съёмка проходит в двух разрешениях – 720р и 1080р, качество видео и фото среднее.
Камера крепится к дрону с помощью безосевого подвеса.
Управление ведётся с пульта, оборудованного ЖК-дисплеем. На экране отображается информация о режимах полёта. Макс. дистанция управления – 100 м. Питание коптера от батареи ёмкостью 2000 мАч. Время полёта – 10 мин. Зарядка – 70 мин.
Показатели:
- вес – 600 г;
- радиус действия – 70 м.
Шестиосевой гироскоп улучшает управляемость и стабилизацию съёмки.
Два режима расхода энергии: низкий и максимальный.
Режим Headless mode – полёт в направлении, указанном пилотом, по прямой линии. Зависание в воздухе, 3D-флипы.
Плюсы:
- низкая цена;
- высокая грузоподъёмность;
- манёвренность;
- барометр для удержания высоты.
Минусы:
- слабое сопротивление ветру.
Виды рэб-пушек в россии
Во время проведения Чемпионата Мира по футболу 2020 российских полицейских вооружили футуристическими ружьями-антидронами “Ступор”. Возможно, дизайнеры пушки вдохновлялись фильмом Люка Бессона “Пятый Элемент”.
Характеристики “Ступора”
- Вес у пушки внушительный – 5,5 кг;
- Дальность “выстрела” – около 500 метров;
- Время работы – до 5 часов беспрерывной “стрельбы”
- Подавление всех частот Wi-Fi (2.4-5.8 ГГц);
- Подавление сигналов СНС (спутниковая навигационная система) – GPS, ГЛОНАСС и т.д.;
- Подавление видеосигнала у БПЛА.
Такой “бластер” используется для охраны закрытых для полетов зон. Это не значит, что теперь патрульные будут каждый день ходить с ними по улице. Специальное вооружение будет использоваться при охране массовых мероприятий международного уровня, например Чемпионат Мира по футболу и Олимпийские Игры. Объем аккумулятора позволяет произвести больше 1000 выстрелов без подзарядки.
Для покупки “Ступора” не нужно специальных бумаг и разрешений. Правда цена кусается. Стоимость варьируется от 400 до 500 тысяч рублей за одну пушку. Если вы владелец частного аэродрома и вас замучили непрошеные летающие гости – “Ступор” вам поможет.
Стопдрон “Стилет”
У “Стилета” меньше вес и заряд батареи. Её хватит на час беспрерывной “стрельбы”. Масса “Стилета” – 3кг. Стоимость отпугивателя беспилотников – 280 тысяч рублей.
Еще одно отличие от “Ступора” – работа в двух режимах: отпугивание или принудительная посадка БВС. При отпугивании подавитель глушит сигнал от пульта управления, и дрон возвращается к пилоту. В режиме посадки блокируются все каналы связи у коптера, включая видеосъемку.
Защита от дронов REX-1
Модель выпущена концерном “Калашников”. Подавитель разработан для российских военнослужащих. С их помощью останавливают незаконное проникновение БПЛА на закрытые для полетов зоны: аэродромы, военные предприятия и т.д.
Как и его “гражданские” побратимы, Rex-1 подавляет сигнал от пульта к беспилотнику на расстоянии 500 метров. А вот спутниковую навигацию он глушит на расстояние до 2 километров.
Помимо основных антенн подавителя, Rex-1 оснащен стробоскопическим фонариком и лазером для “выжигания” оптики у видео и фотоаппаратуры неприятеля.
Вмешательства в работу компаса
Помехи от распределительной платы PDB, двигаелей, батареи , регуляторов моторов и других электрических устройств рядом с APM могут скинуть направление
по компасу, который может привести к кругу ( известно как “туалетный боулинг”)
Помехи от распределительной платы, двигателей, батареи, регуляторов скорости ESC и других электрических
устройств квадрокоптера рядом с полетным контроллером ArduPilot Mega могут влиять на головное
направление компаса, который может привести к “круговым полетам” ( так называемы туалетное смытие)
или даже полет в неправильном направлении.
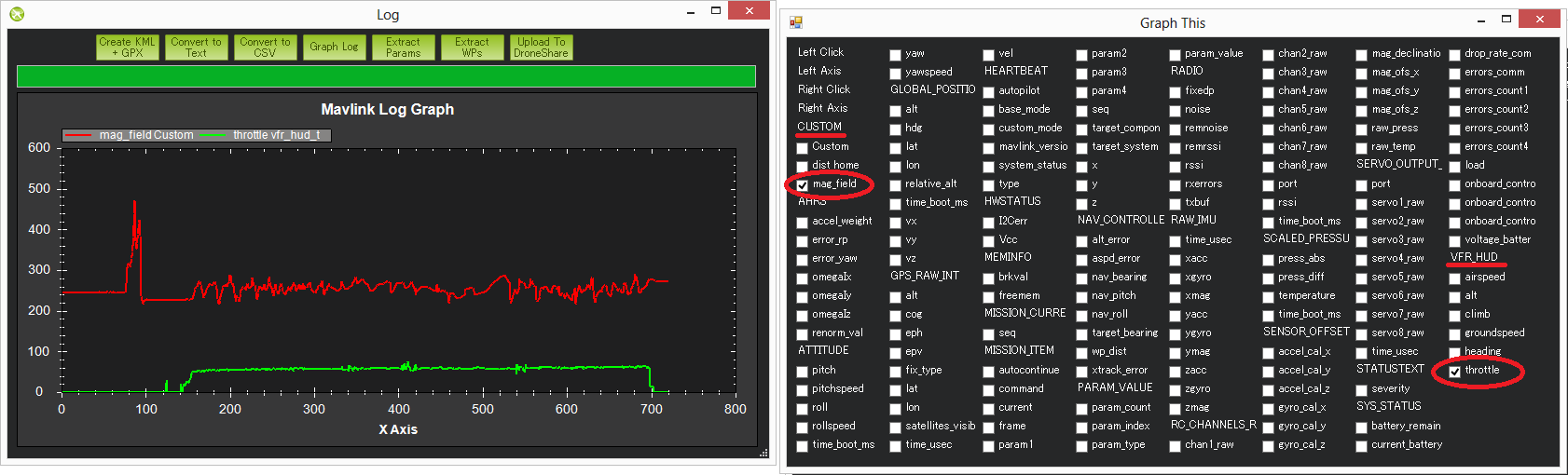
Графическое значение mag_field в TLOG (находиться пот “CUSTOM”) и дроссель (находиться под VFR_HUD)
является самым простым способом, что бы увидеть количество помех.
В графе ниже показано приемлимое количество помех. Вы можете увидеть как колеблится
mag_field когда дросель газа поднят, но только движение вокруг на 10-20%.
Примечания:
- Длина mag_field может быть от 120 ~ 550 в зависимости от того,
где и каком месте находиться квадрокоптер, но обычно оно составляет около 330 . - Магнитные помехи в виде процента от общего магнитного поля также отображаются в конце
процедуры настройки compassmot. - Бортовой журнал полетного контроллера Ardupilot mega содержит “сырые” данные
компаса x, y и z осей (называемые MagX, MagY, MagZ), которые эквивалентны
RAW_IMU xmag, ymag и zmag полям в TLOG. Длину поля можно вычислить загрузив
из бортового журнала данные в Excel фильтруя по сообщениям COMPASS,
а затем расчитать магнитное поле по формуле mag_field =
SQRT (MagX^2, MagY^2, MagZ^2). Обратите внимание, что журналирование
сообщения сомпаса не включены по умолчанию, потому, что он работает
на частоте 50Гц и влияет немного на производительность процессора. - Еще одни параметры которые нужно проверить, должны быть
в пределах между – 150 и 150. Они находятся в TLOG группе SENSOR_OFFSET
в качестве mag_ofs_x, mag_ofs_y, mag_ofs_z и в журнале полетного контроллера
сообщения COMPASS в качестве OfsX, OfxY, OfxZ. Так же можно увидеть в параметрах как
COMPASS_OFS_X, COMPASS_OFS_Y , COMPASS_OFS_Z. - Изображение выше показывает короткий пик в начале графика,
но это может быть проигнорировано потому, что это перед поднятием
дроссельной заслонки. Это вероятно просто подключение других электрических
устройств.
Если калибровка подвеса и imu не помогло?
Компас как и IMU можно откалибровать самостоятельно. Нужно выйти на улицу, в место подальше от домов, крупных металлических объектов и строений. Желательно снять с рук часы (особенно смарт часы с магнитным основанием) и все металлические предметы. Включить квадрокоптер, подключить телефон к пульту управления.
Затем необходимо нажать в правом верхнем углу 3 точки, чтобы войти в меню.
Выбрать верхний пункт (иконка квадрокоптера).
Пролистать вниз и выбрать “Advanced settings”.
Еще раз в самый низ – пункт “Sensors State”.
Выбрать правую вкладку “Compass” и нажать кнопку “Calibrate Compass”.
Далее следуйте инструкциям на экране.
В случае успеха ваш квадрокоптер будет мигать зеленым.
В случае если калибровка не удачна – об этом говорит красное быстрое мигание диода на коптере, попробуйте переместится на подальше от металлических предметов машин, парковок, железобетонных конструкций и провести калибровку повторно.
В случае если после калибровка компаса не завершается успешно или подвес все равно смотрит вбок – проблему может решить обнуление компаса специальным устройством. Сделать обнуление компаса можно совершенно бесплатно в нашем офисе в Москве.
Как калибровать квадрокоптер syma
Принципиально триммирование и настройка подобных дронов не отличается от описанной выше процедуры. Ее можно легко провести собственными силами с помощью инструкции, прилагаемой к коптеру. Также обратим внимание, что модели Syma оснащены устройством, контролирующим уровень заряда аккумулятора.
При приближении последнего к критическому уровню дрон самостоятельно снижается до безопасной высоты, что предупредит его повреждение при полной разрядке и падении на землю. Про этот момент нужно обязательно помнить и если не удается произвести настройку квадрокоптера, то обратите внимание на уровень заряда.

Сам процесс калибровки и триммирования не отличается от моделей других производителей. Для начала нужно запустить дрон на высоту чуть выше полуметра и понаблюдать за ним. Если происходит самопроизвольное смещение, то нужно подкорректировать, учитывая следующие моменты:
- при вращении влево триммер под левым джойстиком управления нужно медленно сдвигать вправо до момента прекращения подобного движения и на оборот;
- при движении аппарата вперед или назад нужно передвигать триммер под правым джойстиком также в противоположном направлении.
Обратите внимание, что передвигать триммер нужно очень медленно из-за риска перестараться и необходимости откалибровать его уже в обратном направлении.
Как стать гонщиком квадрокоптера? понравится ли мне летать по fpv?
 Представьте, что вы летите в небе, поднялись достаточно высоко. На вас надет шлем, а в руках пульт. Вы полностью перенеслись в дрон и будто внутри него. Вы летите туда, куда хотите, полная свобода. Ноги иногда подкашиваются от виражей, а тело пытается потерять равновесие, вы даже наклоняете голову, не замечая этого. Вот так вы себя будете чувствовать, летая по FPV. Даже опытных пилотов будет покачивать на крутых виражах. Конечно, это не всегда может показаться приятным, но если много практиковаться в полетах, это все сойдет на нет и будет редким явлением. Для этого многие садятся на стул или упираются об стену или забор спиной.
Представьте, что вы летите в небе, поднялись достаточно высоко. На вас надет шлем, а в руках пульт. Вы полностью перенеслись в дрон и будто внутри него. Вы летите туда, куда хотите, полная свобода. Ноги иногда подкашиваются от виражей, а тело пытается потерять равновесие, вы даже наклоняете голову, не замечая этого. Вот так вы себя будете чувствовать, летая по FPV. Даже опытных пилотов будет покачивать на крутых виражах. Конечно, это не всегда может показаться приятным, но если много практиковаться в полетах, это все сойдет на нет и будет редким явлением. Для этого многие садятся на стул или упираются об стену или забор спиной.
Также, если вы не дружите с электроникой и паяльником, то вам придется этому научиться, потому что ремонт у вас будет 100%, где то помнять двигатель, где то сгорит регулятор или отломится провод. Иногда это будет неприятно, и вам просто нужно продолжать практиковать.
Самое интересное, что это хобби будет состоять из полетов не все время, а лишь часть. Особенно у новичков. Потому что у всех пилотов гоночных дронов случаются краши, без этого просто необходится, а из этого идет ремонт, выяснение проблем крушения — пилотирование или проблемы с компонентами.
Все это дело практики и, например, поменять двигатель у вас не составит проблем, а занимать это будет 10 минут.
Настройка ралли-точки
Выполните следующие шаги для определения Ралли-точек в ПО Mission Planner:
Выберите мышкой на карте желаему широту и долготу. В Разделе Plight Plan установие нажатием кнопки мышки на карте курсок и выберите из контекстного меню
пункт Rally Points и установите точку выбрав Set Rally Points. Обратите внимание, что данная работа проводиться в экране планировщика полетов (Flight Plan)
а не экрана данных рейса (Flight Data):

Высота “ралли” должна быть указана (обратите внимание, что она по умолчанию для ралли-точки такая же , как и значение высоты маршрута по умолчанию):

Повторите все эти действия для нужных ралли-точек
Загрузите в квадрокоптер ралли-точки выбрав из контекстного всплывающего меню правой кнопкой мыши “Upload”
Следует учесть следующие при использовании ралли-точек:
- При использовании Geofence: обеспечте нахождение ралли-точек внутри геозоны.
- Убедитесь в том, что ралли-точка достаточно высока, что бы не зацепить деревья, рельев и здания.
- Из-за ограничения размера флеш-памяти на ArduPilot Mega число ралли-точек будет ограничеваться 10-ю. На самолете 6-ю. На квадрокоптере этот предел
может быть расширен при использовании других платформ, таких как PX4 или Pixhawk в будущем. - В конфигурации прошивки самолета радиус Loiter для ралли-точки такой же, как и в остальных точках режима Loiter, определяется параметром WP_LOITER_RAD.
- Параметры ALT_HOLD_RTL / RTL_ALT не используются с ралли-точкими, самоле будет идти в ралли-почку на высоте , указанной при добавлении этой точки.
- Параметр RALLY_LIMIT_KM – это максимальное расстояние до
“ралли-точки”, которое может быть от квадрокоптера или самолета,
которое будет рассматриваться на событие режима RTL.
Если дистанция до “ралли-точки” больше, чем растояние от самолета или квадрокоптера до
домашней позиции то используется событие режима RTL с возвратом домой
( на высоте ALT_HOLD_RTL ), а если домашняя точка (Home Position) дальше , чем
ближайшая ралли-точка – используется ближайшая ралли-точка.
Этот параметр для того, что бы предотвратить улет, если ралли-точки были указаны
для нескольких полей на которых вы летаете. Этот параметр может быть отключен,
если установить его в 0. - Параметр RALLY_TOTAL – это число “ралли-точек”, указанных в настоящее время.
Этот параметр будет установлен для вас вашей наземной станцией управления (например Mission Planner),
когда вы добавляете или удаляете “точки”. Маловероятно, что вы установите этот параметр вручную и
это небезопасно делать. RALLY_TOTAL должен быть 0, если вы не указали ни одной “ралли-точки”
и в этом случае домашнее местоположение (Home Position) будет использоваться для событий RTL.
Следующие параметры протокола MAVLink будут контролировать поведение “ралли-точек”
Пример полета
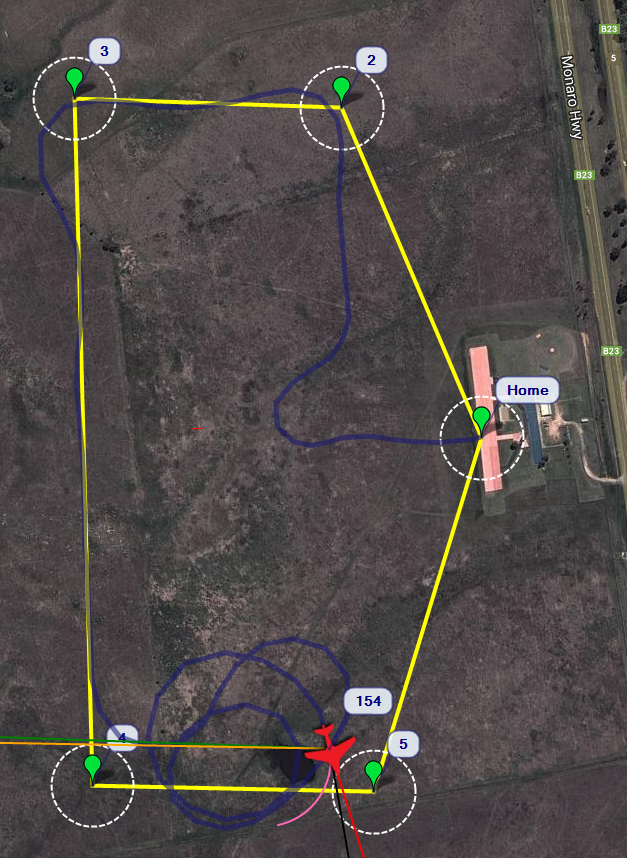
Полет в котором сработало событие RTL , после которого самолет стал кружить возле южной точки в режиме LOITER
Неожиданные ошибки включая failsafes (защита отказа)
Когда происходит неожиданное поведение у полетного контроллера (особенно, когда пилот жалуется,
что квадрокоптер не ответил на команды с радиоаппаратуры) это часто является одной из причины
срабатывания failsafe (защита отказа). Есть 5 защит от отказов, которые могут быть активированны:
защита газа, gps защита, защита наземной станции, защита отказа батареи и “виртуальный забор”.
Самый простой способ найти срабатывание защиты посмотреть журнал полетного контроллера фильтруя
по сообщениям ERR первый столбец.
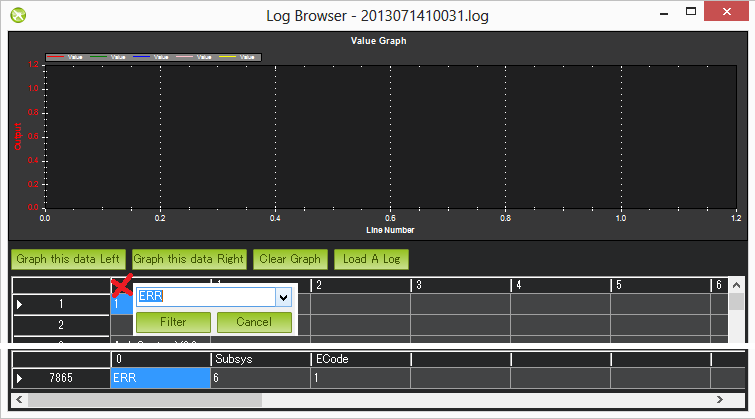
В Subsys (подсистеме) есть область, которая генерирует вызвающую ошибку и ECODE (известная как “код ошибки”)
– это говорит нам, что ошибка была специальная. Ограниченное количество подсистем и кодов ошибок
можно найти в исходных кодах конфигурации ArduCopter файла defines.h.
Sub Systems / Error Codes
- 1: Main (never used)
- 2: Radio
- ECode 1: “Late Frame” which means the APM’s onboard ppm encoder did not provide an update for at least 2 seconds
- ECode 0: error resolved which means the ppm encoder started providing data again
- 3: Compass
- ECode 1: the compass failed to initialise (likely a hardware issue)
- ECode 2: failure while trying to read a single value from the compass (probably a hardware issue)
- ECode 0: above errors resolved
- 4: Optical flow
- Ecode 1: failed to initialise (likely a hardware issue)
- 5: Throttle failsafe
- ECode 1: throttle dropped below FS_THR_VALUE meaning likely loss of contact between RX/TX
- ECode 0: above error resolve meaning RX/TX contact likely restored
- 6: Battery failsafe
- ECode 1: battery voltage dropped below LOW_VOLT or total battery capacity used exceeded BATT_CAPACITY
- 7: GPS failsafe
- ECode 1: GPS lock lost for at least 5 seconds
- ECode 0: GPS lock restored
- 8: GCS (Ground station) failsafe
- ECode 1: updates from ground station joystick lost for at least 5 seconds
- ECode 0: updates from ground station restored
- 9: Fence
- 10: Flight Mode
- ECode 0 ~ 10: the vehicle was unable to enter the desired flight mode
- (0=Stabilize, 1=Acro, 2=AltHold, 3=Auto, 4=Guided, 5=Loiter, 6=RTL, 7=Circle, 8=Position, 9=Land, 10=OF_Loiter)
- 11: GPS
- ECode 2: GPS Glitch
- ECode 0: GPS Glitch cleared
- 12: Crash Check
Ошибка: «недостаточно силы/esc» и «максимальная достигнутая нагрузка»
Ошибка DJI Mavic: Power Load Reched и Not Enough Force/ESC error или Недостаточно Force/ESC предупреждение или ошибка о максимальной мощности нагрузки может быть довольно опасной.
Mavic Mini может даже сбросить высоту и даже разбиться. Во многих случаях дрон будет падать и восстанавливать свою позицию. Однако если вы летите очень близко от земли, Mavic может резко упасть. Это довольно страшно и вам повезет если ваш дрон не окажется поврежден.
Есть много причин которые могут вызвать эту проблему и на момент написания у DJI не было однозначного ответа или решения на это.
Однако многие владельцы сами решили эту проблему или поняли что может являться причиной.
Предупреждение заключается в том, что дрон не получает достаточного питания и на электронных контроллерах (ESC) генерируется сообщение об ошибке.
Это сообщение указывает на проблему с ESC (электронными регуляторами скорости) и двигателями.
Проблемы с питанием могут также указывать на неисправный аккумулятор. Тем не менее от DJI по этому поводу не получилось узнать ничего определенного.
Эта проблема может быть исправлена различными способами.
Рассмотрим на примере DJI Mavic Mini.
Максимальное сопротивление ветру — это проблема возникающая из-за того что квадрокоптер летает при ветре, превышающем 28,8 км/ч, что является максимальной скоростью ветра для дрона.
28,8 км/ч — это уровень 4 по шкале Бофорта, что означает умеренный ветер. Многие из этих предупреждений недостаточной силы/ESC происходят на приличной высоте. Несмотря на то, что на земле может быть спокойно, на высоте может быть ветер который может стать серьезной помехой для полета.
Читайте: Как летать на квадрокоптере при сильном ветре: Советы
Полет на полной скорости — если вы летите на полной скорости и если есть небольшой встречный ветер, это также может привести к ошибке. Двигатели при такой ситуации работают в максимальных режимах. Ослабьте газ и посмотрите, исчезнет ли предупреждение.
Очень быстрый подъем в P-режиме. Возникает ли проблема при быстром подъеме. Если это так, то это потому, что во время полета вверх дрон сталкивается с высоким сопротивлением и контроллер полета обнаруживает это выдавая всплывающее сообщение ESC о недостаточной мощности.
Максимальная высота полета — полет на максимальной высоте или близко к ней для. По мере набора высоты воздух становиться менее плотным (это связано с тем что гравитация притягивает к себе молекулы воздуха к земле). И на большой высоте двигатели беспилотников должны работать в более интенсивном режиме чтобы удерживать беспилотник в воздухе.
Читайте: На какую максимальную высоту может подняться квадрокоптер?
Защита винтов может вызывать проблему — Снимите защитные кожухи винтов, если они прикреплены. Некоторые пилоты решили эту проблему сняв защитные винты.
Читайте: Может ли квадрокоптер долететь до космоса и прилететь обратно?
Неисправные пропеллеры. Многие дроны Mavic Mini, получившие предупреждение «Недостаточно силы / ESC» и «Достигнута максимальная мощность нагрузки» были исправлены простой заменой пропеллеров. На рынке представлено много разных пропеллеров Mavic Mini.
Изучите пропеллеры. Даже если вы не видите какой-либо ошибки, идите вперед и измените их. Они могут быть небольшим дефектом одного или нескольких пропеллеров, что даже не заметно на глаз. Эта проблема была исправлена для многих владельцев путем перехода на новый комплект пропеллеров.
Некоторые пилоты замечали что лопасть пропеллера слегка трется о дрон. Поэтому, когда Mavic Mini выключен, раскрутите винты и посмотрите, происходит ли это.
Кроме того DJI рекомендует заменять полный набор а не только 1 пропел.
Неисправная батарея — Если у вас есть запасные батареи замените и посмотрите, появляется ли предупреждение Not Enough Force или Not Enough Power / ESC. Если ошибка пропадет то это может указывать на проблемы с аккумулятором.
Полет в режиме S или P — предупреждение появляется только в режиме S или P. Это один из вопросов, который всегда задает служба поддержки DJI и может указывать на то где по их мнению существует проблема. Если это происходит только в одном из режимов это может указывать на проблему с программным обеспечением, а не с оборудованием. Выполните обновление программы.
Обновите приложение DJI Fly — убедитесь, что у вас установлена последняя версия приложения DJI Fly. Как правило с новой прошивкой многие ошибки в программном обеспечении устраняются.
Понижение/обновление прошивки — предупреждение Not Enough Force/ESC неоднократно исправлялось, сначала понижая версию прошивки а затем обновляя ее снова.
Вы можете понизить версию прошивки с помощью приложения DJI Assistant 2 на своем компьютере. Если это устраняет проблему то проблема изначально была в поврежденной прошивке.
Подробности сообщений (конкретно для apm arducopter)
ATT (информация высоты)
- Rollin: Желааемый угол крена пилота в сантиметро-градусах (наклон в лево – отрицательное, вправо – положительное)
- Roll: фактический наклон квадрокоптера в сантиметро-градусах (наклон влево – отрицательное, вправо – положительное значение)
- Pitchin: желаемый угол наклона пилота в сантиметро-градусах (наклок вперёд – отрицательное, назад – положительное)
- Pitch: фактический угол тангажа квадрокоптера в сантиметро-градусах (вперед отрицательное, назад – положительное)
- YawIn: требуемая скорость рысканья пилота, число от -4500 до 4500 (не градусы/секунды, вращение по часовой – положительное)
- Yaw: фактическое направление носа, в сантиметро-градусы, 0 = север.
- NavYaw: желаемое направление носа в сантиметро-градусов.
ATUN (обзор автонастройки)
- Ось: 0 = Roll , 1 = Pitch
- TuneStep: 0 = Возвращение к уровню (по горизонту) (до или после испытания),
1 = тестирование (т.е. выполнение подергивания, что бы проверить реакцию),
2 = обновление коэффициентов (дерганье завершено и применены коэффициенты) - RateMin: Минимальный записанный коэффициент во время теста
- RateMax: Максимальный записанный коэффициент во время теста
- RPGain: Коэффициент усиления P происходящего испытания
- RDGain: Коэффициент усиления D происходяего испытания
- SPGain Коэфициент стабилизации P происходяего испытания
ATDE (Auto Tune подробные шаги )
- Angle: угол квадрокоптера в сантиметро-градусах для оси которая проходит испытывается
- Rate: скорость вращения квадрокоптера для оси которая проходит испытания
CAM (время и место, когда затвор камеры был активирован)
- GPSTime: сообщенное время GPS в миллисекундах
- Lat: данные акселерометра оценка широты GPS
- Lon: данные акселерометра оценка долготы GPS
- Alt: данные акселерометра оценка высоты с барометра в сантиметрах над землей
- Roll: угол крена квадрокоптера в сантиметро-градусах
- Pitch: угол наклона квадрокоптера в сантиметро-градусах
- Yaw: курсовое направление в сантиметро-градусах
CMD (команды, полученные от наземной станции или как часть выполняемой миссии)
COMPASS (“сырые данные” компаса, смещения и значения коррекции compassmot)
- MagX, Magy. Magz: “сырые значения” магнитного поля для х, у и z осей
- OfsX, OfsY, OfsZ: “сырье значения” магнитного смещения (изменятся только тогда, когда параметр COMPASS_LEARN 1)
- MOfsX, MOfsY, MOfsZ: compassmot компенсация дроссельной заслонкой или тока
CURRENT (напряжение батареи, ток бортовое напряжение )
- Thr: подаваемое пилотом газ дроссельной заслонки (от 0 до 1000)
- ThrInt: встроенный дроссель (т.е. сумма общего выхода дроссельной заслонки для этого полета)
- Volt: напряжение батареи в вольтах * 100
- Curr: ток от батареи в амперах * 100
- Vcc: напряжение на плате
- CurrTot: общий ток, протекающий от батареи
CTUN (информация дросельной заслонки и высоты)
- ThrIn: дроссель пилота в виде числа от 0 до 1000
- SonAlt: высота над землей в соответствии с гидролокатором
- BarAlt: высота над землей в соответствии с барометром
- WPAlt: желаемая высота в то время когда полетный режим AltHold, Loiter, RTL, AUTO
- NavThr: не используется
- AngBst: дроссельной увеличение (от 0 ~ 1000), как результат обучениям полета квадрокоптера
(автоматически добавляется ко всем пилотным и автопилотным дросселям, чтобы уменьшить потерю высоты во время обучения) - CRate: акселерометр оценка скороподъемности барометра в см/с
- ThrOut: окончательное значение вывода дроссельного газа посланому к двигателям (от 0 до 1000). Обычно равен ThrIn AngBst в режиме стабилизации.
- DCRate: – пилотируемое желание скороподъемности в см/с
D32, DU32 (отдельные значения данных, которые либо целые 32 битные или целые 32 битные числа без знака):
ERR (сообщения об ошибке)
Подсистемы и коды ошибок перечислены ниже
- 1: Главная (никогда не используется)
- 2: Radio
- ECODE 1: “Последний кадр”, что означает, что PPM кодер АРМ в не получала обновления более 2 секунд
- ECODE 0: ошибка решена, что означает, что PPM кодер начал получать данные снова
- 3: Compass
- ECODE 1: компас не удалось инициализировать (вероятно аппаратная проблема)
- ECODE 2: сбой при попытке прочитать одно значение из компаса (вероятно аппаратная проблема)
- ECODE 0: ошибоки выше решены
- 4: Optical Flow
- ECODE 1: не удалось инициализировать (вероятно аппаратная проблема)
- 5: Throttle failsafe
- ECODE 1: дроссель упала ниже FS_THR_VALUE – это означает вероятную потерю контакта между приемником и передатчиком (Rx / Tx)
- ECODE 0: ошибока выше решена, контакт передатчика и приемника восстановлен
- 6: Battery failsafe
- ECODE 1: напряжение батареи упало ниже LOW_VOLT или общая емкость батареи превысила BATT_CAPACITY
- 7: GPS failsafe
- ECODE 1: потеря GPS фиксации по крайней мере как минимум 5 секунд
- ECODE 0: GPS фиксация восстановлена
- 8: Ground Station (Наземная станция) failsafe
- ECODE 1: обновления от наземной станции потеряна как минимум 5 секунд
- ECODE 0: обновления от наземной станции восстановлено
- 9: Fence
- ECODE 1: нарушена высота ограждения
- ECODE 2: круговой забор нарушен
- ECODE 3: высота и круговая ограда нарушены
- ECODE 0: аппарат вернулся внутрь забора
- 10: Flight Mode
- ECODE 0 ~ 10: квадрокоптер не смог переключиться на требуемый режим полета
- (0 = Stabilize, 1 = Acro, 2 = AltHold, 3 = AUTO, 4 = Guided, 5 = Loiter, 6 = RTL, 7 = Круг, 8 = Position, 9 = Land, 10 = OF_Loiter)
- 11: GPS
- ECODE 2: GPS Глюк
- ECODE 0: GPS Глюк устранен
- 12: Crash Check (проверка крушения)
- ECODE 1: Крушение обнаружено
EV (номер события) Полный список возможных событий можно найти в defines.h , но наиболее распространненые являются:
- 10 = Снят с охраны (Arming)
- 11 = Поставлен на охрану (Disarmig)
- 15 = Автоматическое снятие с охраны – (Auto Armed) (пилот поднял газ выше нуля и автопилот может свободно взять под контроль дроссельной заслонки)
- 16 = Взлёт (TakeOff)
- 18 = Полная посадка (Land Complete)
- 25 = Установка “Дома” (Set Home) (домашние координаты, которые былы захвачены)
GPS:
- Status – 0 = нет GPS, 1 = есть GPS, но без фиксации спутников, 2 = GPS с 2D фиксацией, 3 = GPS с 3D фиксацией
- Time: при GPS сообщили время с начала эпохи в миллисекундах
- NSats: количество используемых спутников
- HDOP : мера точности GPS (1,5 хорошо, больше 2.0 не так хорошо)
- Lat: Широта в соответствии с GPS
- LngG: Долгота в соответствии с GPS
- RelAlt: Акселерометр Баро высота в метрах
- Alt: GPS высота (не используется контроллером полета)
- SPD: горизонтальная скорость движения в м / с
- GCrs: наземный курс в градусах (0 = север)
IMU (информация акселерометра и гироскопа)
- GyrX, GyrY, GyrZ: “сырые данные” вращения гироскопа в градусах/секунды
- AccX, Accy, AccZ: “сырые данные” значения акселерометра в м/с/с
INAV (инерциально-позиционная навигация и оценка скорости)
- Balt: высота барометра в см
- IALT: инерциальная оценка высоты навигации в см
- IClb: инерциальная навигационной оценкам скороподъемность в см/с
- ACorrX. ACorrY, ACorrZ: х, у и z-ось коррекции акселерометр в см/с/с
- GLat, Glon: GPS широта и долгота от дома
- ILat, ILng: инерциальная навигационная широта и долгота от “дома”
Mode (полетный режим)
- Режим: режим полета отображается как строка (т.е. STABILIZE, LOITER, и т.д.)
- ThrCrs: дроссельной круиз (от 0 ~ 1000), который является дополнением автопилота, чтобы работать дросселем для поддержания стабильного наведения
NTUN (Навигационная информация)
- WPDst: расстояние до следующей точки (или цель замирания) в см. Обновляются только в то время, когда режим LOITER, RTL, AUTO.
- WPBrg: “подшипник” (поворот?) до следующей точки в градусах
- PErX: расстояние до промежуточного ориентира между квадрокоптером и следующей точки в направлении широты
- PErY: расстояние до промежуточного ориентира между квадрокоптером и следующей точки в направлении долготы
- DVelX: желаемая скорость в см/с в направлении широты
- DVelY: желаемый скорость в см/с в направлении долготы
- VelX: оценка фактической скорости (акселерометр скорость GPS) в направлении широты
- Vely: оценка фактическая скорости (акселерометр скорость GPS) в направлении долготы
- DAcX: желаемое ускорение в см/с/с в направлении широты
- Dacy: желаемое ускорение в см/с/с в направлении долготы
- DRol: нужный угол крена (roll) в сантиметро-градусов
- DPIT: желаемый угол наклона (pitch) в сантиметро-градусов
PM (мониторинг производительности)
- RenCnt: DCM Количество ренормализационная – большое количество может указывать на проблемы в DCM (крайне редко)
- RenBlw: DCM ренормализационная раздутие Количество – сколько раз DCM пришлось полностью перестроить матрицу DCM с момента последнего мониторинга производительности.
Обычно безобидное чило, но это число, постоянно растет может быть признаком того, что DCM имеет проблемы расчета отношения (крайне редко) - FixCnt: количество GPS исправлений, полученных после последнего сообщения PM (трудно себе представить, как это будет полезно)
- NLon: количество длительных основных петель (т.е. петли, которые принимают более 5% , чем 10 мс они должны)
- NLoop: было показано общее количество петель после последнего сообщения PM. Обычно 1000 и позволяет вычислить процент медленных петель,
которые никогда не должны быть выше, чем 15%. - MaxT: максимальное время, что любой цикл принял после последнего сообщения PM. Это значение должно быть близко к 10 000,
но будет до 6000000 в течение интервала, когда двигатели сняты с охраны (armed) - PMT: число, увеличивается на единицу каждый раз, когда удар сердца, полученную от наземной станции
- I2CErr: количество ошибок I2C после последнего сообщения PM.
Любые ошибки I2C может указывать на проблему на шине I2C,
которые могут, в свою очередь, замедлить основной цикл и вызвать проблемы с производительностью.
RCOUT ( PWM/ШИМ выход для отдельных каналов )
- RC1, RC2, и т.д.: команда ШИМ отправлено от контроллера полета к выходу ESC / двигатель / RC
Проблемы системы питания (угасание и прочие)
Внедрение модуля питания стало гораздо проще для людей,
что бы обеспечить надежное энергоснабжение квадрокоптера
на полетном контроллере APM. Это привело к массовому сокращению числа “пониженного” питания,
но они все еще имеют место быть.
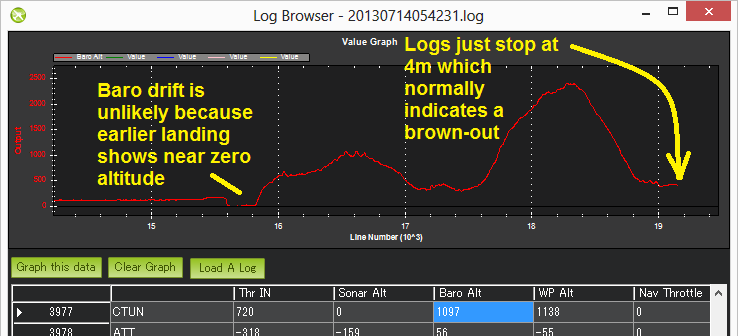
Используйте графики:
- Журнал полетного контроллера, CTUN сообщения, значение Baro-Alt
- Журнал полетного контроллера, GPS сообщения, значения RelAlt (комбинированое значение акселерометра барометра)
- Журнал TLOG значение VHR_HUD alt (комбинированое значение акселерометра барометра)
- Журнал TLOG значение GLOBAL_POSITION relative_alt
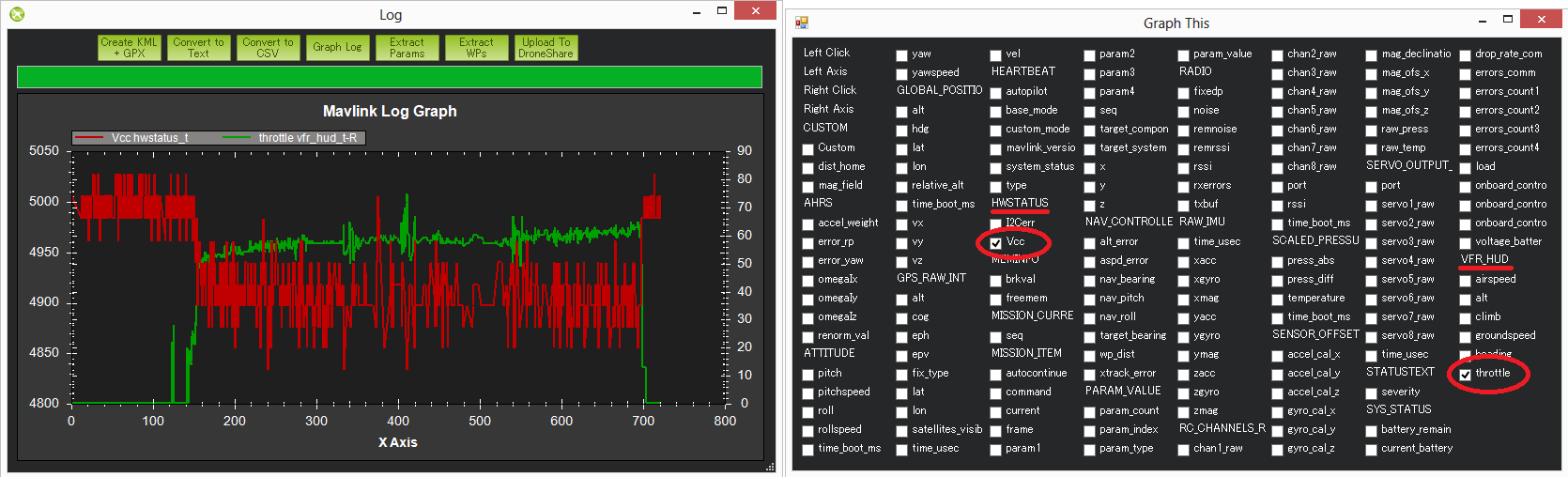
Изменения в напряжении на борту полетного контроллера может быть признаком проблемы питания.
Нормальные изменения в пределах от 0.10 до 0.15 вольт. Большие изменения могут быть признаком того,
что другие устройства питающиеся на общей фазе APM вызывают “рябь” в блоке питания,
что может привезти к “понижению” питания или другому странному поведению.
Бортовое напряжение платы полетного контроллера можно отобразить на графиках:
- Журнале полетного контроллера в сообщениях CURRENT значение VCC
- Журнале телеметрии (tlog) группы HWSTATUS’s значение Vcc
На изображение ниже показано просадка по напряжению на полетном контроллере на 0.15 вольт,
когда подается дроссельный газ. Как правило это не очень хорошая вещь, но из-за
того, что это только 0.15 вольт это наверное еще хорошо. Второй график ниже
(из журнала полетного контроллера другого пилота) показывает более
сильное изменение напряжение, но и как характерно пределах 0.15 вольт.
Просмотр содержимого
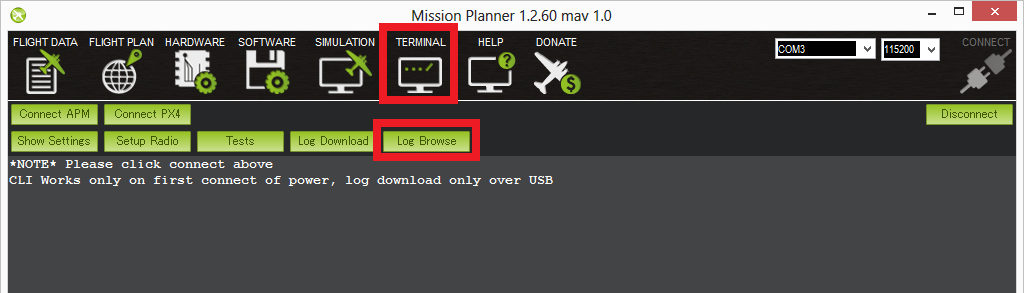
Файлы журналов могут быть открыты для анализа. Выполните следующие действия:
- Откройте экран Terminal ПО Mission Planner
- Нажмите кнопку “Log Browse” и укажите на один из файлов с расширением log
Экран с графиком обозревателя журналов появится перед вами. Размеры графика моугут быть изменены,
нажмите и удерживайте мышкой непосредственно под графиком.
Основным форматом журнала являются:
- На левой стороне отображаются номера строки
- Версия ПО и платы отображаются в самом начале (вверху)
- Следующими идут FTM сообщения, показывающие заголовки колонок для каждого типа сообщения
- PARM строки , которык показывают каждый параметр (в том порядке, в котором они появляются в EEPROM) вместе с их
первоначальными значениями - Сообщения полетных данных, включая GPS, IMU и другие

Отображения графика полетных данных осуществляеся нажатием на соответствующую строку, вы должны увидеть заголовки столбцов
соответсвующим образом. Далее найдите столбец, который вы хотите построить на графике, нажмите на него, а
затем нажмите “Graph this data”. В приведенном выше примере отображатся ATT Roll-in и Roll данные.
Покрутите колесиком мышки , что бы увеличить или уменьшить масштаб графика. Вы так же можете выбрать область на графике, что бы увеличить масштаб на нем.
Если щелкнуть правой кнопкой мыши и выбырать “Set Scale defaul” то масштаб установиться маштабом по-умолчанию.
вот мини руководсво по использованию этого.
Вы так же можете отфильтровать только только по первой колонке (сообщения полета),
нажав на первом столбце и выбрав тип сообщения из раскрывшающегося списка. Это очень полезно,
особенно для просмотров различных полетных режимов (называемое “MODE” режимом),
используемых в ходе миссии. Нажмите на первый столбец снова и выберите “Cancel” что бы сбросить фильтр.

Самый быстрый квадрокоптер в мире

Все, что не изобретет или придумает человек в какой то момент пытаются сделать САМЫМ САМЫМ. Вот и давно ли появились квадрокоптеры как массовое явление?
А уже вот вам пожалуйста образец, как самый быстрый в мире. Видео под катом:
Несмотря на то, что наблюдателю с земли полет квадрокоптера порой может показаться невероятно быстрым, обычно предел скорости у таких дронов — всего порядка 130 км/ч. Drone Racing League модифицировала коптер и установила новый мировой рекорд, разогнав аппарат до феноменальных 263 км/ч!
Чтобы гарантировать, что победу в состязании принесет мастерство, а не количество финансирования той или иной команды, каждому участнику была выдана одна и та же модель квадрокоптера, спроектированный инженерами проекта. В результате, фаворитом оказался DRL RacerX — невероятно легкий (всего 800 граммов), но очень мобильный дрон. Он использует пару батарей емкостью 1300 мАч, которые питают 4 электродвижка, каждый из которых может достигать 46 000 об/мин.
Максимальная скорость беспилотника составляет 289,04 км/ч, однако по условиям состязания для достижения мирового рекорда дрон должен был не просто разогнаться, но и пролететь взад-вперед трассу длиной в 100 метров, при этом максимальная скорость во время обоих пролетов усредняется. Итоговым результатом и стала заветная цифра в 263 км/ч.
На сегодняшний день это не только официально самый быстрый квадрокоптер (предыдущий рекорд скорости составлял 201 км/ч); RacerX побил даже неофициальный Youtube-рекорд, когда беспилотник разогнался до 233 км/ч. Это означает, что на практике коптер запросто обгонит на трассе и Ford Mustang, и Chevrolet Camaros. Что касается участия в официальных состязаниях дронов, то для этого пилотам сверхскоростного квадрокоптера определенно надо обладать рефлексами джедаев.
Однако для самого рекордного коптера этот полет стал последним.
https://youtu.be/dPpQWIA59Wo
[истчники]источники
https://www.popmech.ru/technologies/news-377042-samyy-bystryy-kvadrokopter-v-mire-mirovoy-rekord-skorosti/
А вот еще вам кстати Квадрокоптер с пулеметом и пишут, что Начали продавать первый в мире пассажирский квадрокоптер


, цена 4600 руб")




