

- Dji f450 arf kit (12 500 рублей)
- Бортовой компьютер и сенсоры
- Безопасность
- Детали с али экспресса
- Какие есть варианты?
- Монтаж caddx tarsier 4k в стэк, в башню
- Монтаж приемника
- Особенности выбора комплектующих для сборки квадрокоптера
- Питание и контроллеры питания
- Подключение моторов квадрокоптера: установка двигателей
- Постройка diy квадрокоптера. часть 1 теория
- Прошиваем полетный контроллер в betaflight configurator
- Прошивка регуляторов оборотов в blhelisuite
- Сборка рамы
- Теория полета
- Этапы сборки квадрокоптера на видео
Dji f450 arf kit (12 500 рублей)
Состав кита:
Как видишь, вся техническая часть уже решена за тебя. Производитель может тебе предоставить параметры получившегося коптера, так как знает исходные значения. При самостоятельной сборке, рассчитывать их придётся тебе.
Однако, это ещё не всё. Тебе придётся докупить некоторые компоненты:
- Аппаратура управления 5-канальный и выше на 2.4 Ггц
- Полетный контроллер (DJI NAZA-M, DJI NAZA-M с модулем GPS и компасом или DJI Wookong-M)
- Аккумулятор 3S~4S LiPo
- Зарядник
- Дешёвый подвес (для начала) и дополнительная электроника по желанию (FPV камера, светодиоды…)
В итоге, ты получишь крутой коптер, который ты собрал своими руками. При этом, тебе не придётся разбираться в куче параметров, горах документаций, и всех прочих нюансах. Далее ты сможешь его кастомизировать. Менять можно всё, до чего дотянутся руки, а они дотянутся, поверь.
Сразу докупи запчасти. Как минимум – пару запасных пропеллеров. Обязательно пригодится.
Сейчас я привёл тебе только пример того, от чего тебе стоит отталкиваться. Для более ясной картины я расскажу о том, на что конкретно нужно обращать внимание.
- Много свободного пространства в раме. Будет просто работать
- Это КВАДРОкоптер. Я очень не советую начинать с других компоновок. Ты настрадаешься даже с настройкой этого аппарата, а уж о каком-нибудь страшном октокоптере с соосным расположением пропеллеров думать пока рано
- Элементы каркаса так же являются и печатными платами (плата разводки). Это очень приятный бонус. У тебя не возникнет путаницы с проводами, ты просто физически не сможешь поймать КЗ, и у тебя будет шанс перепаять ещё раз, ели что-то пошло не так
- Большой запас прочности и мощности. Тебя не будут ограничивать разнообразные параметры. Тут всё сделано так, чтобы дать тебе как можно больше свободы. Тебе не придётся выбирать между лампочкой и камерой
- Красивый внешний вид. Даже если ты решил, что для тебя это не важно – это важно. Когда ты соберёшь свой коптер, посмотришь на него, и видишь торчащие провода, хомуты, замотанный синей изолентой аккумулятор и прочие косяки, которые присущи неопытному сборщику – мысль о том, что надо было купить готовый, тебя сожрёт. Радости будет куда больше, если он будет красивым.
Бортовой компьютер и сенсоры
Выбор полетных контроллеров для коптеров очень велик — начиная от простого и дешевого KapteinKUK и нескольких open source проектов под Arduino-совместимые контроллеры до дорогого коммерческого DJI Wookong. Если ты настоящий хакер, то закрытые контроллеры тебя не должны сильно интересовать, в то время как открытые проекты, да еще и основанные на популярной ардуинке, привлекут многих программистов. О возможностях любого полетного контроллера можно судить по используемым в нем датчикам:
• гироскоп позволяет удерживать коптер под определенным углом и стоит во всех контроллерах; • акселерометр помогает определить положение коптера относительно земли и выравнивает его параллельно горизонту (комфортный полет); • барометр дает возможность удерживать аппарат на определенной высоте.
На показания этого датчика очень сильно влияют потоки воздуха от пропеллеров, поэтому стоит прятать его под кусок поролона или губки; • компас и GPS вместе добавляют такие функции, как удержание курса, удержание позиции, возврат на точку старта и выполнение маршрутных заданий (автономный полет).
К установке компаса стоит подойти внимательно, так как на его показания сильно влияют расположенные рядом металлические объекты или силовые провода, из-за чего «мозги» не смогут определить верное направление движения; • сонар или УЗ-дальномер используется для более точного удержания высоты и автономной посадки; • оптический сенсор от мышки используется для удержания позиции на малых высотах; • датчики тока определяют оставшийся заряд аккумулятора и могут активировать функции возврата на точку старта или приземление.
Сейчас существует три основных открытых проекта: MultiWii, ArduCopter и его портированная версия MegaPirateNG. MultiWii самый простой из них, для запуска требует Arduino с процессором 328p, 32u4 или 1280/2560 и хотя бы одним датчиком-гироскопом. ArduCopter — проект, напичканный всевозможным функционалом от простого висения до выполнения сложных маршрутных заданий, но требует особого железа, основанного на двух чипах ATmega.
MegaPirateNG — это клон ArduCopter, который способен запускаться на обычной ардуине с чипом 2560 и минимальным набором датчиков из гироскопа, акселерометра, барометра и компаса. Поддерживает все те же возможности, что и оригинал, но всегда догоняет в развитии.

канальный пульт
С железом для открытых проектов аналогичная ситуация, как и с рамами для коптера, то есть ты можешь купить готовый контроллер или собрать его самостоятельно с нуля или на основе Arduino. Перед покупкой стоит всегда обращать внимание на используемые в плате датчики, так как развитие технологий не стоит на месте, а старье китайцам как-то надо распродать, к тому же не все сенсоры могут поддерживаться открытыми прошивками.
Наконец, стоит упомянуть еще один компьютер — PX4, отличающийся от клонов Arduino тем, что у него есть UNIX-подобная операционная система реального времени, с шеллом, процессами и всеми делами. Но надо предупредить, что PX4 — платформа новая и довольно сырая. Сразу после сборки не полетит.
Настройка полетных параметров, как и программы настройки, очень индивидуальна для каждого проекта, а теория по ней могла бы занять еще одну статью, поэтому вкратце: почти все прошивки для мультикоптеров основаны на PID-регуляторе, и основной параметр, требующий вмешательства, — пропорциональная составляющая, обозначаемая как P или rateP.
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета. Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах. Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение. Настрой и заранее проверь функцию fail safe твоего полетного контроллера, которая поможет приземлиться или вернуть коптер на точку старта при потере сигнала с пульта.
Детали с али экспресса
Одним из бюджетных вариантов квадрокоптера, представленных на Aliexpress для самостоятельной сборки без ущерба для функциональности, является Flysky i6 F450. Его цена составляет около 12086 рублей.
В комплект входят все элементы для создания собственного беспилотника, за исключением аккумулятора и крепежных приспособлений — камеры, хотя крепление ее предусмотрено конструкцией рамы устройства.

Что в пакете
В комплект входит:
| Имя | Особенности |
| Фрейм | Четырехлезвийный. Материал — стеклопластик и полиамидный нейлон. |
| Двигатель | 4 штуки по 53 грамма каждая. |
| ESC | Симонк 30А, 4 шт. |
| Летный контроллер | APM V2.8.0 |
| Сенсоры | GPS-датчик 8n |
| Модуль питания | 5V, 2A. |
| К черту | 8 единиц |
| Звуковой сигнал для уровня разряда | |
| Силовые кабели и соединения компонентов | |
| Передатчик, приемник и панель управления | |
| Аккумуляторы недоступны. Ты должен купить их сам. Пользователи, которые уже приобрели этот беспилотник, рекомендуют 3300 мАч 25с. |
Вам понадобится камера для квадрокоптера, которую можно приобрести отдельно. Первый самособранный беспилотник обычно поставляется с более простой версией.
Например, 5.8G 48CH Wifi камера является хорошим выбором. Он уже оснащен 4,3-дюймовым монитором, который принимает изображение. Цена такого комплекта составляет 3705 рублей.
Какие есть варианты?
Итак, рассмотрим все возможные варианты приобретения или самостоятельного изготовления маленького летательного аппарата, годного как в качестве игрушки, так и для выполнения вполне серьезных задач.

Под определение попадают все квадрокоптеры, продаваемые в собранном состоянии. После покупки, для их использования достаточно подать питание на узлы аппарата и пульт радиоуправления. Самый простой способ приобщения к пилотированию. Товарная номенклатура подобных моделей весьма велика.
Производитель может представлять как все необходимые детали в наборе, так и только некоторые части дрона. К примеру, раму или контроллер работы двигателей. Сборка и покупка недостающих полностью осуществляется силами владельца такого комплекта. Приобретение подобного квадрокоптера рекомендуется начинающим пользователям. Он позволит ввести человека в основы создания летательного аппарата, при этом достаточно прост в сборке.

Монтаж caddx tarsier 4k в стэк, в башню
Сборка квадрокоптера шаг за шагом собственными руками включает в себя самое интересное — сборку видеокамеры в штабель из полетных контроллеров и РПМ, а также сборку модуля камеры на адаптерах, распечатанных на 3D-принтере.
Давайте начнем с адаптеров. Вставьте в них маленькие гайки М2:
Прикрутите эти адаптеры к камере с помощью соответствующих 6 или 8-миллиметровых винтов, чтобы прочно удержать все на месте:
Возьмите боковые панели, которые будут прикреплены к камере. Возьмите сверло на 2, примерьте его (так камера находится в середине) и просверлите 2 отверстия для монтажных адаптеров, но 1 отверстие было достаточно для меня, потому что другое упало прямо в готовое отверстие (решетка):
Теперь перейдем к установке самой доски на башню. Так как монтажная плата камеры составляет 29 * 29 мм, а монтажные отверстия — 20 * 20 мм, то, естественно, установить ее просто так невозможно. Поэтому было решено взять информационную панель от Mamba F405, просверлить 4 отверстия сверлом 2 мм, прикрепить плату и смонтировать ее целиком до стандартного 30*30 мм. Вам также понадобятся винты M2 12 мм из комплекта.
Металлическая панель с синей резиной является теплоотводом платы камеры.
Вы должны переместить все в одну сторону, иначе позже вы не сможете накрутить гайки на саму панель.
В результате, у нас есть этот состав:
Гайки поместятся только с одной стороны, но все будет держаться крепко, что было доказано многочисленными полетами и падениями на этот беспилотный летательный аппарат. Не забудьте надеть резиновые кольца из комплекта бортового контроллера (их довольно много).
https://www.youtube.com/watch?v=b1IVwGmGs4Y
Остается только установить панели на адаптеры камеры. Отвинтите камеру от адаптеров, прикрутите адаптеры к панелям и прикрутите камеру к адаптерам. Монтаж на месте:
Прикрепите верхнюю пластину к раме:
Монтаж приемника
Используется приемник FrSky XM .
Припойте к нему 3 провода:
- Белый — это сигнал;
- Красный 5 В;
- Чёрный — это земля.
Припойте провода, как показано на рисунке ниже (на обратной стороне есть отметки):
Обрежьте термоусадочную трубку до нужного размера. После установки спрячьте в нем приемник.
Сдвиньте провода под нижнюю часть полетного контроллера. Припой к этим булавкам:
Это должно выглядеть так.
На этом этапе сборки квадрокоптера привяжите приемник перед тем, как убрать его в теплозащитный экран. Возьмите радио, включите его, настройте модель (дайте ей название), установите Ch. Range на Ch1-16, Mode D16. Достань эту линию и нажми на круг: 
Нажмите кнопку на приемнике, которая находится в верхнем левом углу, и подключите бортовой контроллер через USB к компьютеру для питания приемника. Зеленый светодиод загорится, а красный — замигает. Теперь отпустите кнопку и снова переместите колесо на аппаратном обеспечении в положение BND, чтобы выйти из режима привязки.
Вот так, ты связал приемник.
Нанесите термоусадочную пленку, усадите ее и сдвиньте приемник под полетный контроллер. Оставим антенны снаружи. Мы прикрепим их к балкам рамы. Предпосылкой для хорошего сигнала является то, что антенны (если их 2) должны быть выровнены друг с другом под углом 90 градусов.
Чтобы это заработало, возьмем 2 пластиковых стяжки-молнии и прикрепим их к балкам рамы таким образом:
Разрежьте термоусадочную трубку до нужного размера и наденьте ее. Затем уменьшите его с помощью зажигалки или фена:
Ты получишь одну из них:
Это даст вам идеальный угол 90 градусов, а сами антенны будут надежно закреплены.
Особенности выбора комплектующих для сборки квадрокоптера

- Рама и ее компоненты. Основная вещь в колпаке — это несущая часть. Если рама легче, используется меньше энергии. Однако следует помнить, что легкие рамы стоят дороже. Прочность не так важна, если вы не планируете устанавливать на коптер более тяжелую камеру. Существует три типа рам: четырехлучевые, шестилучевые и восьмилучевые (по одному мотору на балку).
- Двигатели. Китайские интернет-магазины обычно обманывают и завышают спецификации. Поэтому, чтобы быть уверенным, покупайте двигатели с большей мощностью. Это также позволит вам поднять более тяжелую камеру. Есть также два типа двигателей для четырёхколёсных транспортных средств — коллекционный и несборный

- Пропеллеры. Их цена зависит от назначения вашего коптера. Если в ваших планах нет более сложных «полетов», то достаточно пластиковых пропеллеров. Если вы планируете делать аэрофотосъемку, вам необходимо использовать композитные материалы. Чем дороже пропеллеры, тем они сильнее и тем меньше времени требуется для их балансировки.

- Дистанционное управление, приемник сигнала. Пульт дистанционного управления должен приниматься вместе с приемником. В этом случае приемник будет принимать сигнал, посылаемый с пульта дистанционного управления. Опять же, обычные пульты стоят тысячу и более рублей — у них лучший радиус действия. В самих пультах может быть много ненужных переключателей, которые запутают вас — лучше не покупать такие копии.

- Регуляторы скорости и аккумулятор. Рекомендуется брать комплект двигателей с регуляторами сразу. Вы можете обойтись без него, но тогда вам придется регулировать силу самостоятельно. Батарея должна быть более мощной, особенно если вы хотите установить более тяжелую камеру.

- Контроллер. Контроллеры бывают двух типов. Универсальность настолько удобна, что работает на беспилотных летательных аппаратах любого монтажа, этому способствуют датчики и многофункциональность. Недостатком является цена контроллера — от 17 тыс. рублей. Кроме того, его необходимо будет настроить с помощью специального программного обеспечения, написанного для конкретной модели. Специализированный контроллер уже имеет необходимые настройки для определенного типа копировальных аппаратов.
- Камера. Выбор камеры для вашего квадрокоптера — непростая задача. Мы рекомендуем камеры GoPro или аналоги китайских компаний — их качество не сильно отличается. Основную роль играют вес и угол зрения, последний будет обсуждаться ниже. Чем тяжелее камера, тем сложнее ее расположить. Положение камеры можно рассчитать по следующей формуле L= 2 * tg (A /2) x D (L — поле зрения, A — угол, D — расстояние до винта).
Питание и контроллеры питания
Капитан подсказывает: чем больше мощность мотора, тем больше батарейка ему нужна. Большая батарейка — это не только емкость (читай, время полета), но и максимальный ток, которая она отдает. Но чем больше батарейка, тем больше и ее вес, что вынуждает скорректировать наши прикидки относительно винтов и моторов.
На сегодняшний день все используют литий-полимерные батарейки (LiPo). Они легкие, емкие, с высоким током разрядки. Единственный минус — при отрицательных температурах работают плохо, но если их держать в кармане и подключать непосредственно перед полетом, то во время разряда они сами слегка разогреваются и не успевают замерзнуть. LiPo-элементы вырабатывают напряжение 3,7 В.
При выборе батареи стоит обращать внимание на три ее параметра: емкость, измеряемую в миллиампер-часах, максимальный ток разряда в емкостях аккумулятора (С) и число ячеек (S). Первые два параметра связаны между собой, и при их перемножении ты узнаешь, сколько тока сможет отдавать этот аккумулятор продолжительное время.
Например, твои моторы потребляют 10 А каждый и их четыре штуки, а батарея имеет параметры 2200 мА · ч 30/40C, таким образом, коптеру требуется 4 • 10 A = 40 A, а батарея может выдавать 2,2 A • 30 = 66 A или 2,2 А • 40 = 88 А в течение 5–10 секунд, что явно будет достаточно для питания аппарата.
Также эти коэффициенты напрямую влияют на вес аккумулятора. Внимание! Если тока будет не хватать, то в лучшем случае батарея надуется и выйдет из строя, а в худшем загорится или взорвется; это же может произойти при коротком замыкании, повреждении или неправильных условиях хранения и зарядки, поэтому используй специализированные зарядные устройства, аккумуляторы храни в специальных негорючих пакетах и летай с «пищалкой», которая предупредит о разрядке.
Число ячеек (S) указывает на количество LiPo-элементов в батарее, каждый элемент выдает 3,7 В, и, например, 3S-аккумулятор будет отдавать примерно 11,1 В. Стоит обращать внимание на этот параметр, так как от него зависят скорость оборотов моторов и тип используемых регуляторов.
Элементы батареи объединяют последовательно или параллельно. При последовательном включении увеличивается напряжение, при параллельном — емкость. Схему подключения элементов в батарее можно понять по ее маркировке. Например, 3S1P (или просто 3S) — это три последовательно подключенных элемента.
Однако моторы подключаются к батарее не напрямую, а через так называемые регуляторы скорости. Регуляторы скорости (они же «регули» или ESC) управляют скоростью вращения моторов, заставляя твой коптер балансировать на месте или лететь в нужном направлении.
Большинство регуляторов имеют встроенный стабилизатор тока на 5 В, от которого можно питать электронику (в частности, «мозг»), можно использовать отдельный стабилизатор тока (UBEC). Выбираются контроллеры скорости исходя из потребления мотором тока, а также возможности перепрошивки.
Обычные регули довольно медлительны в плане отклика на поступающий сигнал и имеют множество лишних настроек для коптеростроительства, поэтому их перепрошивают кастомными прошивками SimonK или BLHeli. Китайцы и тут подсуетились, и часто можно встретить регуляторы скорости с уже обновленной прошивкой.
Не забывай, что такие регули не следят за состоянием аккумулятора и могут разрядить его ниже 3,0 В на банку, что приведет к его порче. Но в то же время на обычных ESC стоит переключить тип используемого аккумулятора с LiPo на NiMH или отключить уменьшение оборотов при разрядке источника питания (согласно инструкции), чтобы под конец полета внезапно не отключился мотор и твой беспилотник не упал.
Моторы подключаются к регулятору скорости тремя проводами, последовательность не имеет значения, но если поменять любые два из трех проводов местами, то мотор будет вращаться в обратном направлении, что очень важно для коптеров.
Два силовых провода, идущих от регулятора, надо подключить к батарейке. НЕ ПЕРЕПУТАЙ ПОЛЯРНОСТЬ! Вообще, для удобства регуляторы подключают не к самой батарейке, а к так называемому Power Distribution Module — модулю распределения энергии. Это, в общем-то, просто плата, на которой припаяны силовые провода регуляторов, распаяны разветвления для них и припаян силовой кабель, идущий к батарее.
Подключение моторов квадрокоптера: установка двигателей
Вторая ступень сборки квадрокоптеров шаг за шагом. Раньше популярным было производство двигателей с правой и левой резьбой, чтобы гайки всегда были самозатянутыми во время полета, но в последнее время производители все чаще продают двигатели с резьбой на валу только с одной стороны.
Итак, просто купите 4 мотора сразу, не обращая внимания на ту сторону, где они должны вращаться, это мы исправим позже при настройке прошивки.
Чтобы все выглядело красиво, можно использовать плетеные подтяжки или шнуры, как эта:
Вы также можете просто использовать термоусадочную пленку. Это будет менее красиво, но защита та же самая.
Двигатели будут поставляться с 2 размерами болтов, для толстой рамы и для тонкой рамы. Так как эта рама имеет балки толщиной 5 мм, используйте самые длинные болты. Они не доберутся до оплетки мотора.
Теперь вам понадобится блокиратор резьбы. Вы можете купить его в любом магазине автозапчастей. В идеале он должен быть синего цвета, но если у вас остался красный, просто налейте его на нитки в очень маленьких количествах. Похоже на то:
Смажьте болты и прикрутите двигатели к раме. Будьте осторожны, не снимайте резьбу.
После скручивания электродвигателей измерьте длину проволоки, которую необходимо оставить для пайки. Измеряйте не напрямую, а с учетом перегибов. Например, это:
Мы припаиваем провода так же, как они выходят из мотора — по порядку, хотя вы можете нарушить порядок и поменять крайние провода на месте, тогда мотор начнет поворачивать в другую сторону. В свою очередь, среднюю проволоку нельзя перепутать, она должна быть посередине и припаяна к средней подушке.
После измерения отрежьте излишки, удалите изоляцию с концов и консервную банку. Измерьте и отрежьте кусок термоусадочной втулки или косы и положите его на провода:
Теперь тебе нужно все припаять. Хорошо нагрейте его, чтобы получить хороший контакт, в противном случае могут возникнуть проблемы с остановкой двигателей при вводе в эксплуатацию (как один из вариантов):
Затем перейдите к термоусадочной машине с помощью зажигалки или паяльной сушилки, чтобы усадить ее.
Постройка diy квадрокоптера. часть 1 теория
Решили собрать квадрокоптер? Для вас это темная чаща? Не знаете за что взяться? Статья именно для вас. Составлена на личном опыте.
Часть 2
Заинтересовали квадрокоптеры. Решил сделать заказ, выбор пал на хабсан х4 c камерой 0.3мр.
Дождался, получил.Достаточно много отлетал на нём(были краши, долгие ожидания запчастей и ремонты). Мой мозг посетила идея собрать большой квадрокоптер, окунулся в эту тему, перечитал много статей. По возможности отвечал на вопросы людей, состоящих в группе Rc моделистов: по поводу выбора деталей, сборки квадрокоптера. Из всего этого возникла идея написать сию статью.
Принцип полёта
Итак, Если вы решили собрать свой квадрокоптер, то вам необходимо определиться с бюджетом. От суммы, которую вы готовы потратить на это Чудо, зависит размер. Наиболее частые размеры(в мм.) это 250,330,450,550 и больше.
*250 размер: маленький, легкий, чаще все используют только для FPV полётов.
*330 и 450 золотая середина для бюджетного квадрокоптера. Приемлемая масса и цена сборки.
*550 и больше можно отнести к профессиональным коптерам или мультироторам. Такие машины получатся тяжелыми и дорогостоящими. Для данных ЛА будут мощные двигатели и они могут таскать приличный вес, вплоть до килограммовых зеркалок.
Своё повествование я продолжу опираясь на коптер 450 масштаба.
Особое место в данной категории занимают рамы DJI 330 и 450, TBS Discovery.
Цена их соответствующая…высокая.
Есть множество клонов, его я и выбрал.
gearbest.com/rc-parts/pp_88914.html
Настало время выяснить,что же такое квадрокоптер и из чего он состоит.
1. Рама
2. Приёмник/Передатчик
3. Контроллер полёта:
a) AIOP
b) NAZA
c) MuliWii
d) HKPilot
е) AMP
f) И другие
4. Силовая установка
a) Мотор
b) Регулятор скорости
c) Пропеллеры
5. Аккумулятор
6. Доп. Оборудование:
a) FPV система (вид от первого лица в реальном времени)
• Курсовая камера
• Передатчик
• OSD
b) Подвес для бортовой камеры
c) Подсветка
Теперь можно все детально рассмотреть.
1) С рамой уже определились. 450 масштаб, клон TBS.
2) Приёмник/Передатчик. Выбор его имеет очень важное значение. Вам нужно для себя понять: как далеко вы хотите летать.
Самые популярные варианты:
1,5-2км обеспечит 2,4Ггц
433 мгц обеспечит около 5-10км(все зависит от мощности, можно улететь и на 20км)
Для себя выбрал 2,4Ггц FlySky Th9x 9каналов
Ссылка
Не дорогая и простая в настройке аппаратура.
Для квадрокоптера необходимо от 5 каналов.
Выбор данной аппаратуры обусловлен её популярностью, давностью на рынке.Существует множество клонов.Ведётся много споров по поводу того, какая фирма была первой, это та же тургига 9, авионикс и другие… В интернете множество настроек.
3) Контроллер полёта
На данный момент очень много контроллеров полёта для квадрокоптеров. Свой выбор я сделал. Это Naza Lite c GPS
www.banggood.com/ru/DJI-NAZA-Flight-Control-System-and-GPS-Lite-Version-p-906572.html
Не очень дорого и сердито. Наза требует минимальной настройки и сделать это очень просто.
С контроллерами AIOP, Crius и MultiWii будет много раз сложнее и особенно новичку.
Почему я взял контроллер с GPS?
Данная функция необходима для зависания в точке и возврата домой.
Я вижу это очень удобным функционалом.
4) Силовая установка
Вызывает множество вопросов у непосвященных.
Используются БК моторы. Они являются трёх фазными(3 провода), их КПД около 90%.
Для управления скоростью вращения таким мотором используется регулятор оборотов(регуль), который получает команды от контроллера полёта.
Рассмотрим рамы 330,450мм. В зависимости от ваших потребностей необходимо прикинуть вес квадрокоптера. В среднем получается от 1к до 1,5кг. Желательно чтобы тяга моторов была в 2-2,5 раза больше общей массы. Это говорит о том, что тяга должна быть 2-3 кг. Делим это на 4 и получаем тягу одного мотора: примерно 500-750 гр.
Возникает вопрос: какой двигатель выбрать? Смотрим в характеристики рамы: нас интересует какие двигатели можно в неё поставить. Должны интересовать первые 2 цифры: 22 или 28 в большинстве случаев.
Начинаем выбор двигателя. У названия двигателя вы увидите некую величину, например: 1100kv. Это величина обозначает количество оборотов на 1 вольт. Двигатели с высокими значениями kv имеют меньше витков обмотки статора, чем менее оборотистые.Из этого вытекает, что максимальная сила тока будет выше в двигателях с меньшим kv, которые имеют большую силу крутящего момента и это позволяет использовать большие пропеллеры.
Можно сравнить с коробкой передач автомобиля. 380kv и 1400kv это как первая и третья передача у авто.
380kv для размеренных медленных и долгих полётов с большой грузоподъемностью
1400kv для быстрого и маневренного хода.
В просторах интернета или же в описании этого двигателя можно увидеть его технические характеристики и результаты тестов. Нужно узнать максимальную силу тока (А) которую сможет потянуть двигатель и исходя их этих данных подобрать регулятор оборотов(ESC). Допустим max А для двигателя 20А. Тогда, ESC берём на 20-25% мощнее, 25-30А.
Теперь смотрим результаты тестов.
Например видим: 11х4.7 –3S-12А – 830гр
Это означает
11х4.7 — характеристики пропеллера(11-дюймы, 4.7 шаг )
3S — число банок LiPo батареи
12А — сила тока в цепи при данной нагрузке
830гр – тяга двигателя при даных условиях
Таким образом, максимальная тяга 830х4=3300 гр., max сила тока в цепи 12х4=48А
Максимальная сила тока нужна для подбора Аккума и Проводки.
Для начала не берите карбоновые пропы. Переплата. Учитесь летать на дешевых.
Крепление пропеллера зависит от самого двигателя. Большинство пропеллеров имеют адаптер под ось двигателя. Возможно крепление на Цангах или же резьбой. Есть прекрасные варианты самозатягивающиеся-крепления у DJI, при таком варианте ваш пропеллер никогда не открутится во время полёта.
Для более простых вариантов советую дополнительно закрепить герметиком для резьбы.
Обращаю внимание: сравнивать моторы с разным kv можно при условиях одного типоразмера. Например, EMAX XA 2212 существуют в разных конфигурациях:
820
980
1400
Их можно сравнить.
Эффективность мотора с 1400kv будет максимальной при использовании пропеллера 8040,
А мотора с 820kv — при пропеллере 1147.
Максимум крутящего момента будет у мотора с 820kv, поэтому целесообразно использовать большие пропеллеры. А мотор с 1400kv будет любить высокие обороты при меньшей нагрузке.
Разница между представленными моторами в обмотке.
Разумно их использовать так:
1400kv на раме 330 и пропеллерами 8040
980kv на раме 450 и пропеллерами 1045
820kv на раме 500-550 и пропеллерами 1147
Я выбрал gearbest.com/rc-quadcopters-parts/pp_154973.html
И пропеллеры gearbest.com/rc-parts/pp_109432.html
Замечательный набор.
Схема подключения
Для простоты: Сигнальный- черный, Силовой( -) — красный
5) Аккумулятор
Выбирая аккум необходимо подобрать токоотдачу. Это число С.(25С,35С)
Не забываем что, по нашим данным система кушает 48А.
Допустим что, есть аккум 3300mAh 3S 35C Lipo Pack
3300 mAh — ёмкость аккума
3S – число банок(одна банка 3,7v)
35C – токоотдача. Т.е. Аккум ёмкостью 3.3Ah(3300 mAh) х 35C = 115А
Что достаточно покрывает наше энергопотребление. Даже излишне. Чем больше С, тем тяжелее и дороже аккум.
Посмотрим сможет ли аккум такой же ёмкости, но с токоотдачей 25С справится с нашими задачами или нет: 3.3Ah(3300 mAh) х 25C = 82А
Ответ:да.
Такой аккум будет легче и дешевле.
Для контроля состояния батареи можно купить такую штуку.
gearbest.com/rc-quadcopters-parts/pp_137605.html
Для зарядки аккумов очень популярна Imax B6, будьте осторожны, очень много подделок.
gearbest.com/rc-parts/pp_27704.html
И не забывайте с LiPo надо очень осторожно обращаться.
Мой совет: берите не меньше пары аккумов.
6) Доп. Оборудование.
• Когда вы определились с дальностью полёт и выбрали систему управления, можно начинать выбор FPV системы:
FPV- дословно: вид от первого лица в реальном времени.
2,4Ггц совместима с 5,8Ггц
433Мгц совместима с 1,2 Ггц
Иначе будут создаваться совместные помехи.
Для своей 2.4Ггц я подобрал 5,8Ггц 200mw
gearbest.com/rc-parts/pp_27971.html
FPV-система стостоит из:
1) Курсовой камеры
2) Передатчика на квадрике
3) Приёмной станции на земле.
Для Увеличения дальности связи можно заменить стандартные антены на ”клеверы”
gearbest.com/rc-parts/pp_69370.html
Большая часть передатчиков питается в пределах 9-12v, небольшая 3S батарея сможет запитать передатчик и камеру, которая выбирается для данного вольтажа.
Что значит 200mw?
Это мощность передатчика. Она непосредственно влияет на дальность связи. На открытой местности с нештатными антенами сигнал можно получать на расстоянии до 1 км.
С учетом того, что моя система управления на расстояние больше 1,5-2км не способна, это идеальный
вариант для моих потребностей.
С выбором приёмника и передатчика теперь все понятно, а как выбрать камеру, их огромное колличество?
Выбор камеры первоначально упирается в денежные средства.
Есть камеры которые имеют функцию потоковой передачи данных и одновременной записи.Стоимость таких камер значительно выше. Очень популярной является камера мобиус.
gearbest.com/car-dvr/pp_145224.html
Появился её конкурент, тоже имеющий AV выход
gearbest.com/action-cameras/pp_143378.html
Можно использовать курсовую камеру из самых дешовых, без корпуса. Стоимость которой колеблется от 600 до 1000рублей, а записывать с помощью хорошей экшен камеры на подвесе.
У FPV камеры мы увидим число ТВЛ. Что это такое? Это число строк развертки. Для FPV камеры будет достаточно 500-700ТВЛ. Важное значение имеет уровень минимальной освещенности, данный параметр измеряется в люксах. 0.01 люкс достаточно для полётов даже вечером. Угол обзора имеет не менее важное значение. 100-120 градусов это идеально. Не плохо бы иметь автоматическую коррекцию засветов и авто. баланс белого.
Картинку можно вывести на такой монитор
gearbest.com/rc-parts/pp_117460.html
• Можно прикупить 2х- или 3х-осевой подвес для камеры. Такая штука позволяет поворачивать камеру и иметь более стабильную картинку, без рывков и дерганий.
Штука достаточно дорогая.
У меня вот такой: gearbest.com/rc-parts/pp_110479.html
• Естественно сама бортовая камера gearbest.com/action-cameras/pp_77094.html
• Можно установить LED подсветку, пищалку,GPS-трэкер
Как вы поняли, что бы собрать такой БПЛА необходимо не мало вложений.
Цена приблизительно в пределах 400-500 долларов.
Этот обзор предназначен для новичков и несет в себе теорию, в скором времени будет продолжение.Со сборкой и настройкой.
Я запланировал цикл статей и буду не спеша их реализовывать.
Буду рад критике,спасибо за просмотр.
Вскрою карты: конечный результат
Как такую штуку собрать и поднять в небо?
Инструкция будет в следующей части)
Вот небольшой ролик из первых полётов с подвесом.
P.S Покупалось все на личные средства.
Прошиваем полетный контроллер в betaflight configurator
Зажимаем кнопки BOOT на полетном контроллере и подключаем к компьютеру через USB-кабель.
Открываем Betaflight и переходим на вкладку «Программатор» и выбираем цель и версию прошивки. Выбираем в первой строчке FURYF4OSD (DIAT) и самую последнюю (новую) версию прошивки. Остальное не трогаем. Потом нажимаем «Загрузить прошивку онлайн»:
После того, как скачалась прошивка, жмем «Загрузить прошивку«: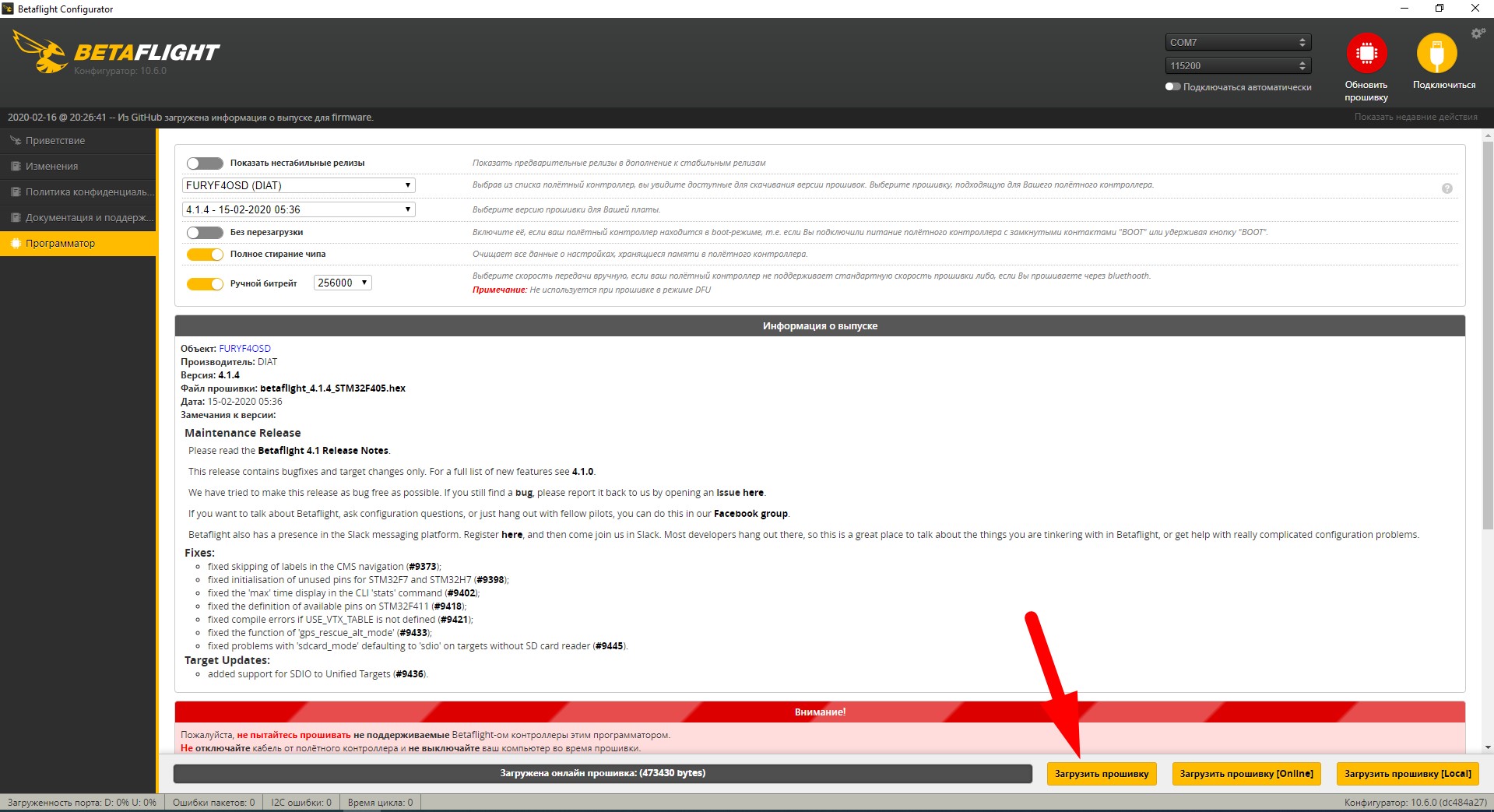
Начнется процесс прошивки, после окончания можно нажать кнопку «Подключиться» в верхнем правом углу.
Прошивка регуляторов оборотов в blhelisuite
Сначала нам нужно открыть BLHeliSuite и прошить регуляторы оборотов. На нужна версия без 32 и на момент опубликования, она называлась BLHeliSuite16714901.
Запускаем и открываем. Сверху выбираем для Cleanflight:
Внизу выбираем нужный порт (чтобы узнать какой, подсоедините USB к полетному контроллеру и посмотрите, какой порт появился в списке. Это же можно посмотреть и в диспетчере устройств) и нажимаем Read Setup, чтобы прочитать настройки.
Не забудьте снять пропеллеры!
Программа скажет, что настройки прочитаны успешно:
Нажимаем Flash BLHeli:
Далее вам система предложит выбрать версию прошивки и прочие схемы, везде соглашаемся и ничего не меняем:
В конце программа предложит прошить второй регулятор оборотов. Делаем все тоже самое, так как их 4 штуки:
В конце программа сообщит, что все 4 регулятора оборотов прошиты:
В этой же программе можно будет менять направление вращения моторов, это нужно, чтобы квадрокоптер смог летать. Вращаться они должны по такой схеме:
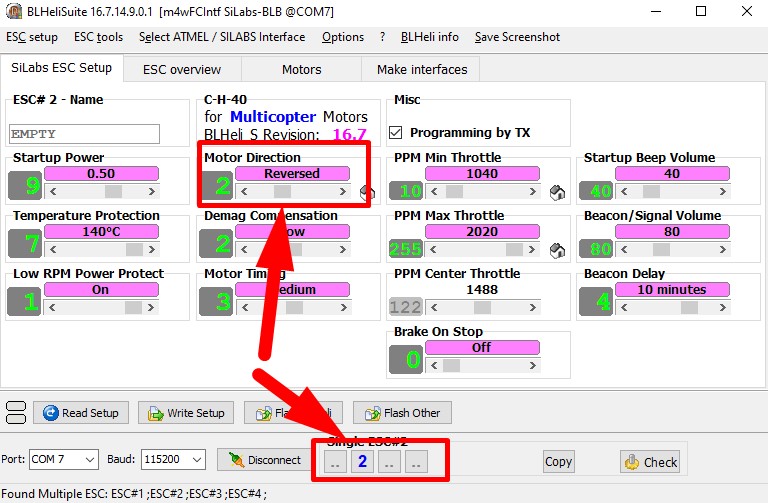
В этой программе вы также сможете настраивать музыку, которая звучит при включении и сочинять свою. Программа для тонкой настройки регуляторов оборотов. Но если вам не хочется разбираться в настройках и просто нужно прошить регуляторы, то вам подойдет простое приложение — BLHeli Configurator.
Для простой прошивки регуляторов, читайте статью: Как прошить полетный контроллер и ESC BLhelli. Прошивка квадрокоптера
Здесь все гораздо проще и интуитивно понятно.
Сборка рамы
В качестве основы была выбрана классическая 115-миллиметровая рама под названием «марсианская». Стандартным типом является Гибрид Х:
Фиолетовые сообщения добавляют стиль и цвет в сборку.
Она проста в сборке, комплект поставляется с файлом, который можно использовать, если вы хотите обработать углы деталей, они могут быть острыми. Нижняя матрица с нижними балками собирается первой.
Не устанавливайте пока прокладки, так как они будут мешать припаянным проводам при последующей сборке. Я поторопился и прикрутил их, а потом снова отвинтил.
Здесь вам понадобятся шестигранник и гайка, чтобы затянуть нижнюю часть.
Затем установите пластиковые стойки для крепления башни от контроллера вращения, полетного контроллера и так далее. Они затягиваются сзади винтами
Чтобы регуляторы оборотов «сидеть» на стойках более мягко, наденьте на них силиконовые демпфирующие кольца. Они поставляются вместе с рамой:
Далее необходимо взять регулятор скорости и лудить контакты, к которым будут припаяны провода двигателя. Если вы паяете в первый раз, сначала смажьте колодки флюсом припоя, затем возьмите припой, и есть два способа сделать это: либо нанести паяльную проволоку на контакт и расплавить ее паяльником, либо расплавить припой на кончик паяльника и нанести каплю на контакт. Затем установите регулятор(ы) скорости на стойки:
Теория полета
В теории полета (аэродинамике) принято выделять три угла (или три оси вращения), которые задают ориентацию и направление вектора движения летательного аппарата. Проще говоря, летательный аппарат куда-то «смотрит» и куда-то двигается. Причем двигаться он может не туда, куда «смотрит».
Три эти угла принято называть крен, тангаж и рыскание. Крен — это поворот аппарата вокруг его продольной оси (оси, которая проходит от носа до хвоста). Тангаж — это поворот вокруг его поперечной оси (клюет носом, задирает хвост). Рыскание — поворот вокруг вертикальной оси, больше всего похожий на поворот в «наземном» понимании.

В классической схеме вертолета основной винт при помощи автомата перекоса лопастей управляет креном и тангажем. Так как основной винт обладает ненулевым сопротивлением воздуха, у вертолета возникает вращающий момент, направленный в сторону, противоположную вращению винта, и, чтобы его скомпенсировать, у вертолета есть хвостовой винт.
Изменяя производительность хвостового винта (оборотами или шагом), классический вертолет управляет своим рысканием. В нашем же случае все сложнее. У нас есть четыре винта, два из них вращаются по часовой стрелке, два — против часовой. В большинстве конфигураций используются винты с неизменяемым шагом и управлять можно только их оборотами.
Если мы увеличим обороты одного винта, вращающегося по часовой стрелке, и уменьшим обороты другого винта, вращающегося по часовой стрелке, то мы сохраним общий момент вращения и рыскание по-прежнему будет нулевым, но крен или тангаж (в зависимости от того, где мы сделаем ему «нос») изменятся.
А если мы увеличим обороты на обоих винтах, вращающихся по часовой стрелке, а на винтах, вращающихся против часовой стрелки, уменьшим (чтобы сохранить общую подъемную силу), то возникнет вращающий момент, который изменит угол рыскания. Понятное дело, что все это будем делать не мы сами, а бортовой компьютер, который будет принимать сигнал с ручек управления, добавлять поправки с акселерометра и гироскопа и крутить винтами, как ему надо.
Для того чтобы спроектировать коптер, необходимо найти баланс между весом, временем полета, мощностью двигателей и другими характеристиками. Все это зависит от конкретных задач. Все хотят, чтобы коптер летал выше, быстрее и дольше, но в среднем время полета составляет от 10 до 20 минут в зависимости от емкости аккумулятора и общего полетного веса.
Стоит запомнить, что все характеристики связаны между собой и, к примеру, увеличение емкости аккумулятора приведет к увеличению веса и, как следствие, к уменьшению времени полета. Чтобы узнать, сколько примерно твоя конструкция будет висеть в воздухе и сможет ли вообще оторваться от земли, существует хороший онлайн-калькулятор ecalc.ch.
Но прежде чем вбивать в него данные, нужно сформулировать требования к будущему аппарату. Будешь ли ты устанавливать на аппарат камеру или другую технику? Насколько быстрым должен быть аппарат? Как далеко тебе нужно летать? Давай посмотрим на характеристики различных компонентов.

Этапы сборки квадрокоптера на видео
Положите все на стол и начнем.
- Грубо оцените требуемую длину проводов контроллера, на всякий случай добавьте небольшой допуск и обрежьте их до требуемой длины.
- Мы припаиваем разъемы к выходам регулятора, чтобы облегчить подключение двигателей.
- Припойте контроллеры скорости к печатной плате.
- Также припаяйте разъем батареи к печатной плате.
- Осторожно прикрутите двигатели к балкам дрона. Обратите внимание на резьбу во время установки.
- Припаяйте разъемы двигателя, если их нет.
- Прикрутите балки с двигателями к плате.
- Прикрепите регуляторы к коптеру. Проще всего это сделать с помощью пластиковых зажимов.
- Подключите провода контроллера к двигателям в случайном порядке. При необходимости Вы можете изменить заказ позже.
- Прикрепите модуль управления к корпусу (сначала сфотографируйте заднюю сторону, а затем посмотрите, для чего он нужен). Мы даже можем прикрепить его с помощью резины, но я рекомендую сначала использовать мягкую двухстороннюю клейкую ленту.
- Подключите регуляторы скорости к регулятору. Порты с пометкой «плюс»-«минус»-«пустые» обычно соединяются белым проводом с экраном.
- Используйте оставшуюся клейкую ленту, чтобы прикрепить приемник ближе к блоку управления и подключить необходимые каналы к соответствующим портам. Используйте документацию на этот приемник и фотографию внешнего края платы, чтобы понять, какой проводной стек отвечает за что.
- Подключите питание устройства от аккумулятора через разъем.
- Ты отлично справляешься! Ты построил свой первый беспилотник.


