

- Баланс белого (white balance)
- Вид приложения dji go 4 настройки:
- Возможные проблемы.
- Другие опции камеры
- Инструкция по работе с геодезическими квадрокоптерами
- Настройки визуальной навигации:
- Настройки камеры (camera settings)
- Настройки пульта управления (remote controller settings).
- Настройки фото photo settings
- Обработка измерений
- Планирование маршрута полета
- Подготовка к афс
- Полет
- Состояние системы дрона dji go4:
Баланс белого (white balance)
Здесь вы можете корректировать нереалистичные цветовые оттенки. Например, белые предметы в реальности выводятся на фото также в белом цвете. Этот показатель измеряется в Кельвинах. Если у вас стоит режим Авто, то камера самостоятельно выставляет оптимальные цвета для фото. Вы также можете выбрать готовые цветовые профили или настроить их самостоятельно.
Цветовая температура | Источник освещения |
1000 – 2000 K | Искусственное освещение |
2500 – 3500 K | Вольфрамовая лампа |
3000 – 4000 K | Восход солнца/Закат солнца (ясное небо) |
4000 – 5000 K | Люминесцентная лампа |
5000 – 5500 K | Электронная вспышка |
5000 – 6500 K | Дневной свет (чистое небо) |
6500 – 8000 K | Умеренно пасмурное небо |
9000 – 10000 K | Тень или Сильно пасмурное небо |
Вид приложения dji go 4 настройки:
Вы будете проводить большую часть своего времени здесь, управляя своим беспилотником, поскольку это первая картинка при подключении Вашего дрона. При нажатии на значки на боковой стороне экрана вы можете изменить настройки.
1. Состояние системы: этот значок указывает на состояние полета самолета и отображает различные предупреждающие сообщения.
2. Состояние обнаружения препятствий: красные полосы отображаются, когда препятствие находится рядом с самолетом. Оранжевые полосы отображаются, когда препятствия находятся в зоне обнаружения.
3. Индикатор уровня заряда батареи. Индикатор уровня заряда батареи обеспечивает динамическое отображение уровня заряда батареи. Цветные зоны на индикаторе уровня заряда аккумулятора отображают уровни мощности, необходимые для выполнения различных функций.
4. Режим полета: текст рядом с этим значком указывает текущий режим полета. Нажмите, чтобы настроить параметры главного контроллера. Эти настройки позволяют изменять пределы полета и устанавливать значения усиления
5. Уровень сигнала GPS: Показать текущее количество подключенных спутников GPS. Белая полоса указывает на адекватный сигнал GPS.
6. 3D Sensing System Status: нажмите на этот значок, чтобы включить или отключить функции, предоставляемые 3D Sensing System.
7. Настройки Wi-Fi: нажмите, чтобы войти в настройки Wi-Fi.
8. Уровень заряда батареи: этот значок показывает текущий уровень заряда батареи. Нажмите, чтобы просмотреть меню информации о батарее, установить пороговое значение предупреждений о батарее и просмотреть историю предупреждений о батарее.
9. Общие настройки: нажмите, чтобы войти в меню общих настроек для параметров, метрик, включения прямой трансляции, отображения маршрутов полета и т.д.
10. Gimbal Slide: отображает высоту подвеса
Возможные проблемы.
В записи Rinex файла отсутствует тайм марки срабатывания затвора
Проверьте канал передачи события с камеры на плату Emlid Reach M . Для этого откройте WEB интерфейс приемника и зайдите в раздел «Camera Control» (см. рисунок 6). Проверяем запись событий от срабатывания камеры. На пульте DJI нажимаем кнопку «сделать кадр».
Возможное причины:
– Выдержка стоит меньше чем 1/2000.- В меню камеры в свойствах «Mechanical Shutter» переключатель не в положении «включено» (см. рисунок 7). На рисунке он включен.
___________________________________________________________________________________________________________________________________________
Модуль Emlid Reach M раздает Wi-Fi, но подключение к WEB интерфейсу не происходит.
Возможные причины:
– Модуль запускает свою операционную систему только тогда, когда получит значение времени от спутников. Убедитесь, что антенна ГНСС установлена, а БПЛА находится на таком месте, на котором хорошая видимость неба.- Иногда во время подключения происходит сбой и приемник подключается по сети Wi-Fi некорректно.
В Rinex файле БПЛА есть пробелы – количество событий меньше количества фотографий.
Возможная причина:
Проверьте правильность настроек в разделе «RTK Settings». Процессор модуля может не справляться с нагрузкой и делать пропуски если частота измерений установлена более 5 Гц и установлена запись более чем 2-х навигационных систем.
Рекомендованные настройки для центральной части РФ: Системы: GPS, Glonass.Частота: 5 ГЦ.
_________________________________________________________________________________________________________
Другие опции камеры
Здесь представлены множество настроек, которыми вы можете управлять. Наличие этих опций зависит от модели квадрокоптера. Примеры приведенные ниже, взяты из функционала DJI Mavic Pro.
Гистограмма (Histogram): при включении этой функции, на экране появится квадрат Гистограммы. В нем отображается экспозиция фото, которое вы хотите сделать. Левая часть диаграммы показывает соотношение черных и серых тонов. Правая – выделенные части и светлые зоны. Средняя часть показывает средние тона.
Функция выключения передних светодиодов во время съемки: здесь вы можете включить/выключить эту функцию.
Фиксация подвеса Камеры во время съемки: если эта функция включена, то подвес будет направлен в ту же сторону, где вам необходимо сделать фото. Если эта функция выключена, то подвес с Камерой будет двигаться вслед за движениями дрона.
Функция Длительного автофокуса Enabled AFC Mode: при включении этой функции, камера включит автоматический фокус как только вы начнете запись видео или съемку фото.
Помощник настройки фокуса MF Focus (P4P): при ручном режиме съемки эта функция поможет контролировать фокус.
Механический затвор Mechanical Shutter (P4P Inspire 2): эта функция помогает избежать эффекта “желе” при съемке быстродвижущихся объектов.
Портретная съемка Portrait Capture (Mavic): эта настройка для съемки портрета.
Предупреждение о переэкспонировании Over Exposure Warning: если эта функция включена, то вы получите уведомление о том, что фото переэкпонировано (MAVIC/ Phantom 4 / Inspire 2).
Автоматическая синхронизация фотографий в HD формат Auto Sync HD Photos: при включении этой функции, во время полета фото в высоком разрешении будут транслироваться с вашего дрона на мобильный девайс во время полета.
Предварительный просмотр Длительной экспозиции Long Exposure Preview: эта функция позволяет перед тем как сделать фото предварительно увидеть экспозицию.
Запись видео Video Caption: при включении этой функции, во время съемки, приложение сделает файл (SRT) со следующей информацией: высота, GPS, ISO, затвор, барометр, координаты точки GPS для возврата домой и др.
Центральная точка Centre Points: здесь вы можете выбрать визуальное оформление центральной точки на экране.
Функция против бликов Anti-Flicker: она помогает избежать бликов при съемке. Можно выбрать уровень от 50 Гц до 60 Гц. Эта опция зависит от региона: в Европе – 50 Гц, в США – 60 Гц.
Режим нумерации фото и видео File Index Mode: здесь вы можете настроить нумерацию файлов фото/видео от меньшего к большему. При каждой последующей съемке, нумерация продолжится с последнего предыдущего. Эту функцию можно сбросить. Тогда во время каждой новой съемки, нумерация будет начинаться заново – с номера 001.
Порог максимальной фокусировки Peak Focus Threshold: при включении этой функции, во время фокусировки, будут выделяться дополнительные красные линии вокруг объекта. У этой функции есть несколько режимов: выкл./низкий/нормальный/высокий.
Формат SD карты Format SD Card: здесь вы можете отформатировать вашу SD карту.
Изменить настройки Камеры Reset Camera Settings: здесь вы можете скинуть все существующие настройки камеры.
Инструкция по работе с геодезическими квадрокоптерами
Перед началом аэрофотосъемки (АФС) необходимо:
– Зарегистрировать ваш квадрокоптер в Росавиации;
– Проверить отсутствие запретных для полета зон в месте проведения работ. Карта запретных зон для квадрокоптеров DJI;
– При необходимости получите разрешения на полет квадрокоптера у местных органов власти;
– Оценить приемлемость погодных условий для полетов (отсутствие осадков, тумана, сильного ветра (более 10 м/с), высоту нижнего края облачности и пр.);

Подготовка оборудования
– Проверьте разъем питания аккумулятора на предмет оплавления и загрязнение. Включите квадрокоптер и убедитесь в отсутствии предупреждений и ошибок в приложении DJI GO 4.
– Используйте карту памяти U3 класса, с объемом от 16 до 64 Гб. Карты 128 Гб могут вызвать зависание камеры на 10-40 секунд во время интервальной съемки.
– Зарядите аккумуляторы. Одна батарея в среднем обеспечивает 27 минут полетного времени или 70-90Га охватываемой площади.
– Зарядите пульт управления.
– Зарядите аккумулятор базовой станции и убедитесь в достаточности объема свободной памяти. Настройте режим записи измерений статики в точке с известными координатами.
Подготовка к АФС
Для получения качественного фотоматериала, помимо правильных настроек камеры, необходимо уменьшить проявление различных артефактов, таких как: тени, блики, пересвеченные и перетемненные области.
Для этого:
– Производите АФС в светлое время суток. Идеально, если солнечный свет будет рассеян тонкой, высокой, сплошной облачностью. В ясный день, лучшее время для съемки: пару часов после рассвета и перед закатом.
– Блики можно устранить поляризационными фильтрами.
– Для подбора оптимальной экспозиции, ориентируйтесь на изображение транслируемое с камеры и используйте гистограмму.
– Полезно сделать тестовый вылет в несколько различных точек области проведения работ, сделать тестовые фото с разной экспозицией, оценить обстановку, убедиться в отсутствии помех, проверить уровень сигналов от спутников, связь, силу ветра и т.д.
Планирование маршрута полета
Для построения конечного продукта – цифровой модели местности, рельефа, карты высот, ортофотоплана и т.д., фотограмметрической программе необходимо большое количество качественных фотографий местности.
Фото должны иметь достаточное продольное и поперечное перекрытие, для поиска общих точек между всеми соседними фотографиями. Для обеспечения этого необходимо, чтобы квадрокоптер находился на определенной высоте и летел по определенному маршруту делая фотографии с разной периодичностью.
Существуют специальные приложения которые управляют квадрокоптером и делают все в автоматическом режиме в соответствии с настройками пользователя.
Вот некоторые из них: Litchi проф. планировщик teofly.com, Pix4D Capture, MapPilot, DroneDeploy, DJI GS Pro и другие.
Существуют также решения с построением маршрута в сторонних программах с последующей загрузкой в полетное приложение с помощью KML файла. Например платные Litchi или MapPilot.
Данный метод подходит для продвинутых пользователей и позволяет контролировать множество параметров прохождения маршрутов а также получать бОльшую производительность.
При правильном построении маршрутов, квадрокоптер летает по оптимальной траектории и не останавливается в поворотных точках что существенно сокращает время полета. При средней скорости горизонтального перемещения 10 м/с, максимальное расстояние которое может пройти коптер за один полет – 11 км.
Интервальное фотографирование при этом методе можно производить не зависимо от приложения, с помощью модуля синхронизации камеры Ashot.
Активация модуля управления камерой Ashot
Модуль позволяет производить фотографирование без участия приложения с частотой 1 кадр каждые 1.3 или 1.8 секунды, а также передает сигнал о фото событии в GNSS приемник, точно в середине выдержки.
Для активации Ashot необходимо выполнить следующие действия:
1. Настройте на кнопки С1 или С2 пульта управления, функцию опускания камеры вниз (в надир, -90) и поднимания вверх (в горизонт, 0). Функции Camera Forward/Down в приложении DJI GO4, Restart Gimbal (Рестарт подвеса) в Litchi.
2. Опустите камеру вниз.
3. Из нижнего положения поднимите кнопкой камеру вверх и сразу опустите вниз. Камера начнет делать фотографии с интервалом 1.3 секунды.
4. Для активации интервала 1.8 секунды, из нижнего положения поднимите камеру вверх и через 1,5-2 секунды опустите вниз.
5. В процессе фотографирования можно управлять наклоном камеры колесиком на пульте управления. Фотографирование не остановится.
6. Для того чтобы остановить фотографирование, из нижнего положения поднимите камеру вверх и сразу опустите вниз.
Также АФС можно производить в ручном режиме, стиками регулируя скорость и направление движения квадрокоптера. Фотографирование при этом можно осуществлять с помощью модуля Ashot, либо по таймеру каждые 2 секунды (настраивается в полетном приложении).
В полетном приложении при этом виден пройденный маршрут и можно контролировать параллельность галсов для обеспечения необходимого перекрытия и исключения не охваченных зон.
Данный режим можно рекомендовать только опытным пользователям, при небольших объемах съемки, а также в местах с высокой вероятностью сбоя навигационной системы (зоны глушения сигналов).
Во всех случаях, рекомендуется строить маршруты так, чтобы квадрокоптер в основном летал под углом в 90 градусов к направлению ветра.
При полетах над рельефом с перепадами высот, рекомендуется летать вдоль изолиний рельефа.
Настройка камеры
– Переключатель режима камеры: положение A (режим приоритета диафрагмы).
– ISO (светочувствительность): 100
– Aperture (диафрагма): 2.8-8, в зависимости от освещенности. Очень важно чтобы выдержка при фотографировании была не короче 1/1600. С выдержкой 1/2000 и короче, перестает работать механический затвор – что ухудшает качество фото.
– White Balance (баланс белого): Sunny или Cloudy
– Style (стиль): Landscape
– Color (цветовая схема): None или Normal
– Image Size (пропорции фото): 3:2
– Image Format (формат изображения): JPG
– Mechanical Shutter (механический затвор): включено
– Фокусировка камеры: режим M (ручной) и перевести фокус в бесконечность
Раскладка опознаков
При проведении АФС на квадрокоптере с GNSS приемником, мы получаем точные координаты центра каждого кадра. Это дает возможность строить цифровую модель местности и привязывать её в плане, достаточно точно и без опознаков.
Не смотря на это, мы рекомендуем использовать несколько опознаков для контроля получаемых данных. А также, хотя бы один опознак нужен для автоматической калибровки камеры в фотограмметрической программе и уточнения высоты модели.
Опознак – это хорошо различимый на фото объект, с ярко выраженным центром с известными координатами. В качестве опознака можно использовать ранее созданные элементы (например дорожная разметка) или создать свои (краской или полотнищами в виде Х или Г, пластиковыми тарелками).
Координаты опознаков обычно определяют методом RTK.
Раскладывать опознаки лучше в местах с наибольшей и наименьшей высотами снимаемой территории, а также ближе к её границам.
Работа с базовой станцией и приемником квадрокоптера
Все геодезические квадрокоптеры на базе DJI Phantom 4 Pro и DJI Phantom 4 Pro v2.0, применяют пост-процессный метод обработки данных (PPK). Для успешной реализации данного метода, необходимо использовать два GNSS приемника, которые записывают сырые данные измерений в формате Rinex. Один устанавливается в точку с известными координатами и пишет статику с частотой не менее 5Гц, с 5-15° маски возвышения (базовая станция). Другой выступает в качестве ровера на борту квадрокоптера.
По завершении полета, необходимо скачать и обработать эти два файла в телеграм-боте Teobox PPK Bot.
Подключение и настройка приемника AGNSS (L1/L2) установленного на квадрокоптер (ровер):
1. Накрутите антенну, включите квадрокоптер и дождитесь готовности платы AGNSS. Она будет издавать звуковой сигнал (бип бип бип).
2. После прекращения подачи звукового сигнала AGNSS будет мигать желтым индикатором в переднем левом луче квадрокоптера, пока не соединится по крайней мере с 6-ю спутниками, после чего индикатор начнет мигать зеленым.
4. Найдите сеть “AGNSS_XXXX” в настройках Wi-Fi вашего мобильного устройства или ноутбука и подключитесь с паролем “12345678”.
5. После подключения введите адрес http://192.168.0.1 в адресную строку вашего браузера для входа в веб-интерфейс AGNSS, для проверки настроек.
6. Рекомендуемые настройки: Запись исходных данных GPS ГЛОНАСС 10 Гц.
7. Приемник будет автоматически начинать запись данных при включении квадрокоптера и завершать её при выключении. Таким образом, на каждый полет будет создаваться отдельный файл с данными.
Для подключения и настройки базовой станции, воспользуйтесь инструкцией производителя.
В качестве базовой станции можно также использовать GNSS приемники референцной геодезической сети. Вы можете запросить Rinex файл измерений, покрывающий зону и время полета квадрокоптера. Перед полетом необходимо убедиться что станция активна и запись измерений производится.
Так как самая быстрая частота записи таких станций в основном составляет 1 Гц, коптер перед взлетом необходимо выдержать включенным не менее 2-х минут на открытой местности, для сбора достаточных данных, если базовая станция находится дальше 10 км.
Максимальное расстояние до референцной базовой станции: не далее 50 км;
Подготовка квадрокоптера
1. После включения квадрокоптера и размещения его на открытом пространстве, подождите не менее 2-х минут для поиска спутников и сбора достаточного количества данных. В это время включите приложение DJI GO4 и убедитесь в отсутствии критических предупреждений или ошибок.
2. Отформатируйте SD карту в квадрокоптере!
3. Проверьте состояние компасов квадрокоптера, показания должны находиться в зеленой области. Если показания колеблются в желтой или красной зоне, необходимо устранить источник магнитных наводок, либо изменить место взлета. При необходимости произведите калибровку компасов. Калибровку можно производить только вдали от потенциальных источников магнитных наводок (металлические объекты, ЛЭП, стоянки, железобетонные конструкции и т.д.).
4. Если полет производится при низких температурах, после взлета дайте коптеру повисеть на месте пару минут, для разогрева батареи. Выполняйте полет плавно, без резких наборов высоты и продолжительных повышенных нагрузок.
5. Перед взлетом убедитесь что квадрокоптер поймал минимум 8 спутников.
6. Для взлета используйте ровную, твердую, не пыльную поверхность. Можно стартовать с серого транспортировочного кейса. Не взлетайте с капота или крыши автомобиля, т.к. это вызовет проблемы с компасом.
7. При ручной посадке, если площадка ограниченная, квадрокоптер можно поймать рукой за основание ножки. После этого опустите правый стик пульта управления (газ) до упора вниз и подержите так 3 секунды, пока моторы не остановятся.
8. Во время полета, в том числе в автоматическом режиме, следите за телеметрией квадрокоптера и его положением в пространстве, а так-же за корректностью прохождения маршрута. Будьте готовы в случае необходимости, перейти на ручное управление.
ВНИМАНИЕ! Не начинайте или не продолжайте полет, если вы обнаружили какое-то не нормальное поведение квадрокоптера (появление не понятных вам сообщений или предупреждений в приложении, отклонение от маршрута, потеря сигнала управления и/или трансляции видео на малых расстояниях, потеря спутников без видимых причин, не адекватный отзыв на ручное управление и т.д.). В случае наступления данных обстоятельств, необходимо прекратить полет до выяснения причин!
9. Если потребуется сделать несколько вылетов на один объект, то при разрядке батареи, приземлите коптер. Необходимо вынуть аккумулятор, плотно вставить новую батарею до щелчка и включить питание. Подождите не менее 2-х минут и взлетайте снова.
10. При смене аккумулятора, обращайте внимание на температуру разъема питания. Если разъем сильно нагрелся, не используйте данную батарею без технического обслуживания контактов.
11. После окончания каждого полета, на этапе посадки квадрокоптера, наблюдайте за световым индикатором приемника AGNSS (светодиод в переднем левом луче). Индикатор должен МОРГАТЬ ЗЕЛЕНЫМ. Если индикатор МОРГАЕТ или ГОРИТ КРАСНЫМ, это может сигнализировать о проблемах с записью спутниковых данных. Необходимо перезапустить квадрокоптер и повторить вылет еще раз.
12. После завершения полетов, выключите квадрокоптер и поисковый маяк. Затем, вашу базовую станцию.
13. Не летайте рядом с запретными зонами (аэропорты, стадионы, тюрьмы, посольства, воинские части, правительственные и силовые объекты, оборонные предприятия и т.д.).
Работа с поисковым маяком
На все наши геодезические квадрокоптеры, устанавливаются радиомаяки для поиска модели при нештатных ситуациях. Маяк подключается к GNSS антенне и может передавать координаты местонахождения коптера, а также возможен поиск методом “охота на лис”.
Маяк автоматически включается при включении квадрокоптера и заряжает свой встроенный аккумулятор для автономной работы в течение 14 дней. Если за это время маяк не будет выключен, он перейдет в спящий режим для предотвращения переразрядки встроенного аккумулятора.
Тем не менее, рекомендуем самостоятельно выключать маяк после полетов. Это позволит сохранить полный заряд встроенного аккумулятора и обеспечит максимальное время работы маяка в экстренной ситуации.
Выключение маяка производится удаленно, с помощью рации:
1. Поднесите рацию к коптеру.
2. В течение 7 секунд, пошлите тоновый вызов на частоте 1750Гц.
3. Маяк ответит обратным отсчетом: “три”, “два”, “один”.
4. Пока идет отсчет, нужно еще раз послать тоновый вызов на 3 секунды.
5. Маяк издаст звуковые сигналы и выключится.
Сбор полученных данных
Для начала обработки информации с геодезического квадрокоптера, вам необходимо следующее:
1. Скачать фотографии с карты памяти квадрокоптера.
2. Скачать ubx файл с приемника в квадрокоптере. Подключитесь к приемнику по Wi-Fi и в разделе Logging найдите необходимые файлы. Проверьте, что количество файлов ubx, равно числу включений дрона.
3. Скачать Rinex файл с базовой станции. Используйте подключение через Wi-Fi или прямое подключение в соответствии с руководством пользователя вашего оборудования.
4. Получить координаты опознаков и базовой станции.
Обработка полученных данных
Каждый *.ubx файл составляет около 8МБ для 20-минутного полета с GPS GLONASS 5 Гц.
Количество фотографий зависит от временного интервала между ними. Если интервал Ashot составлял 1,3 сек., то это 1000 фотографий. Если интервал был 1,8 сек., то это около 700 фотографий.
Для преобразования UBX в формат RINEX используйте бесплатное программное обеспечение RTK lib.
Для более полной обработки данных, без дополнительного ПО, используйте телеграм-бот TeoBox PPK Bot.
Обработка спутниковых данных в телеграм-боте TeoBox PPK Bot.
Для загрузки данных, откройте бота, введите команду /start, и следуйте дальнейшим инструкциям.
Вам понадобяться файлы с приемника квадрокоптера, с базовой станции и файл PRJ с параметрами системы координат.
На выходе вы получите TXT файл, который вместе с фотографиями с квадрокоптера, необходимо загрузить в программу Teobox. На выходе вы получите переименованные и упорядоченные фотографии а также CSV файл с координатами центров снимков. Далее эти файлы можно использовать в фотограмметрических программах.
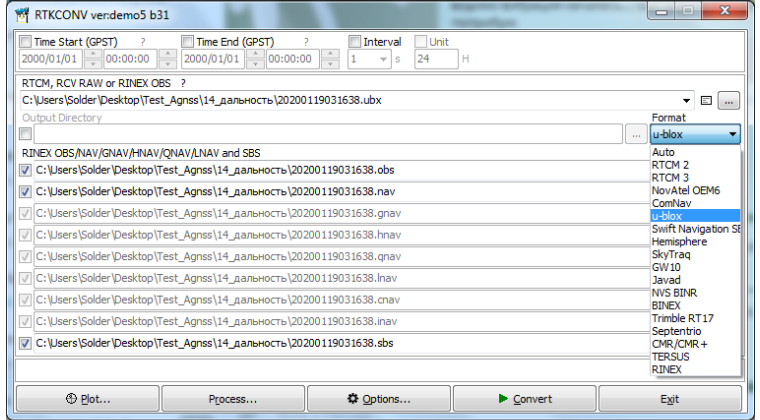
Конвертирование Ubx файлов с помощью пакета RTK lib.
Скачайте пакет RTK lib и запустите rtkconv.exe.
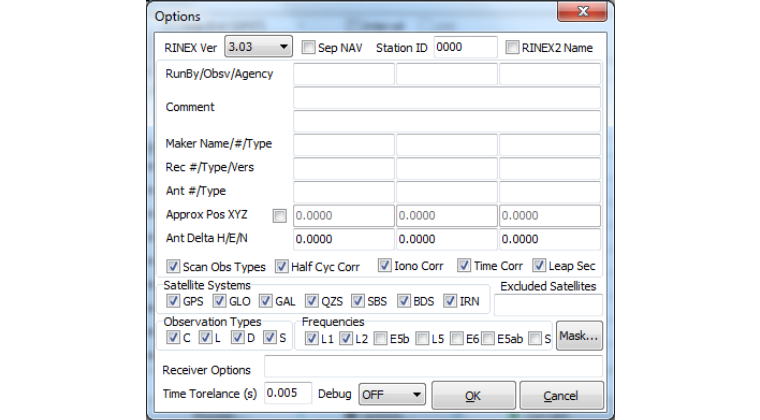
В верхнем поле, выберите нужный файл ubx. В меню Format выберите u-blox. Нажмите кнопку “Options…” и выполните настройки как на скриншоте ниже и нажмите “Ok”. Далее нажмите кнопку Convert.
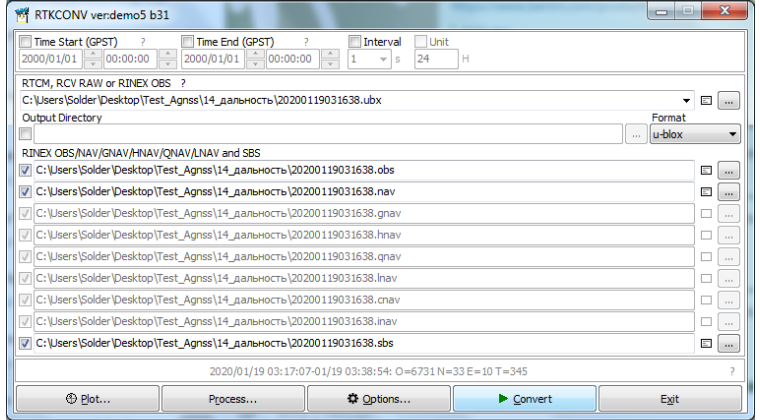
После конвертации, создадутся два файла *.obs и *.nav.
Проверка данных OBS
Если вы все сделали правильно, в нижней части окна RTK Conv появятся следующие строки:
0=… – наблюдение
N=… – эфемериды
T=… – количество временных меток
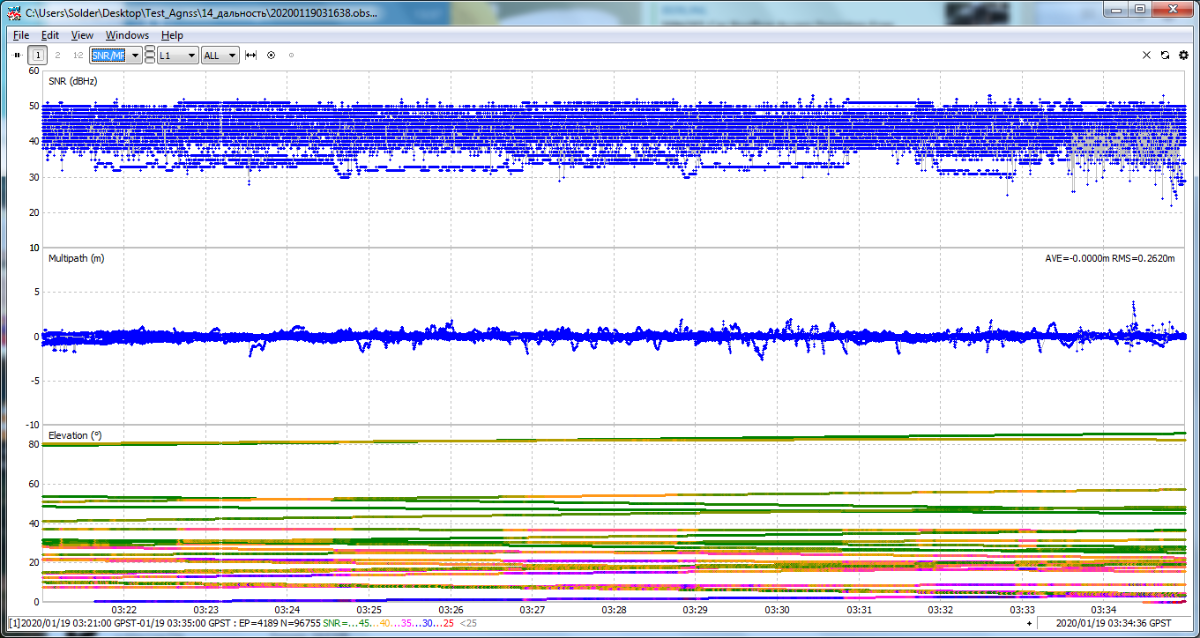
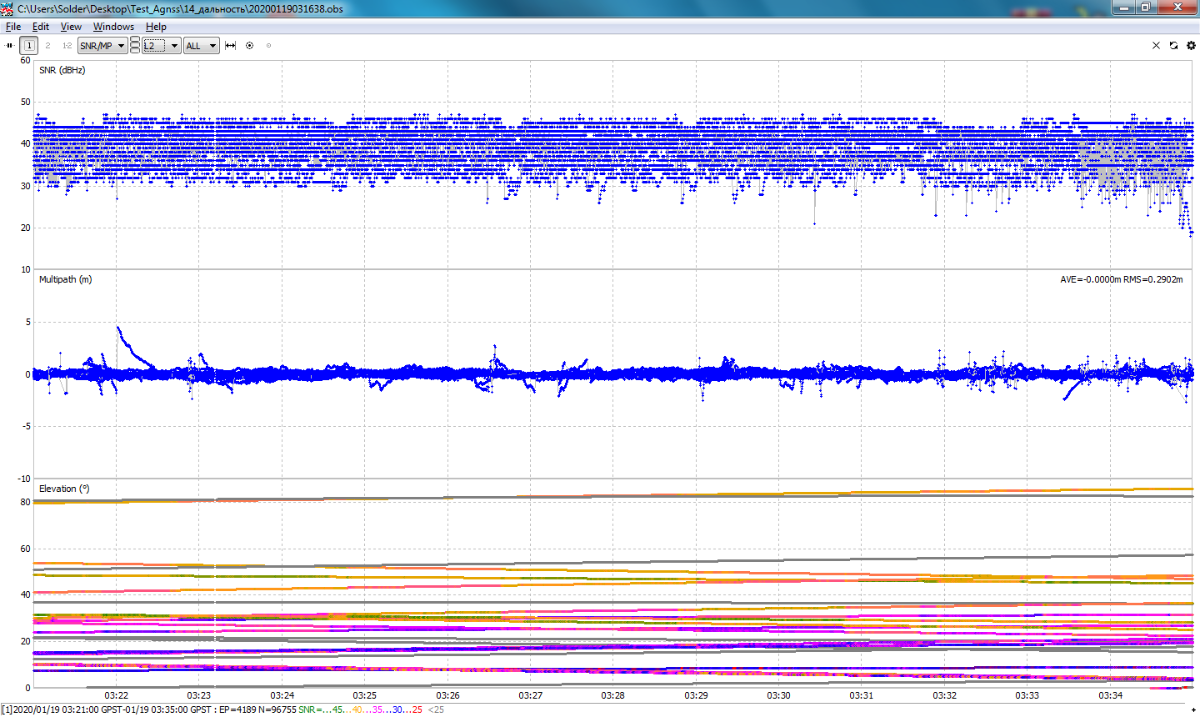
Чтобы убедиться в качественности измерений ГНСС, нажмите кнопку “Plot…”.
Откроется окно со спутниками, видимыми во время полета (см. скриншот).
Для хорошего результата в данных не должно быть пробелов и циклических сдвигов. Циклические проскальзывания происходят, когда сигнал GNSS блокируется, например зданиями.
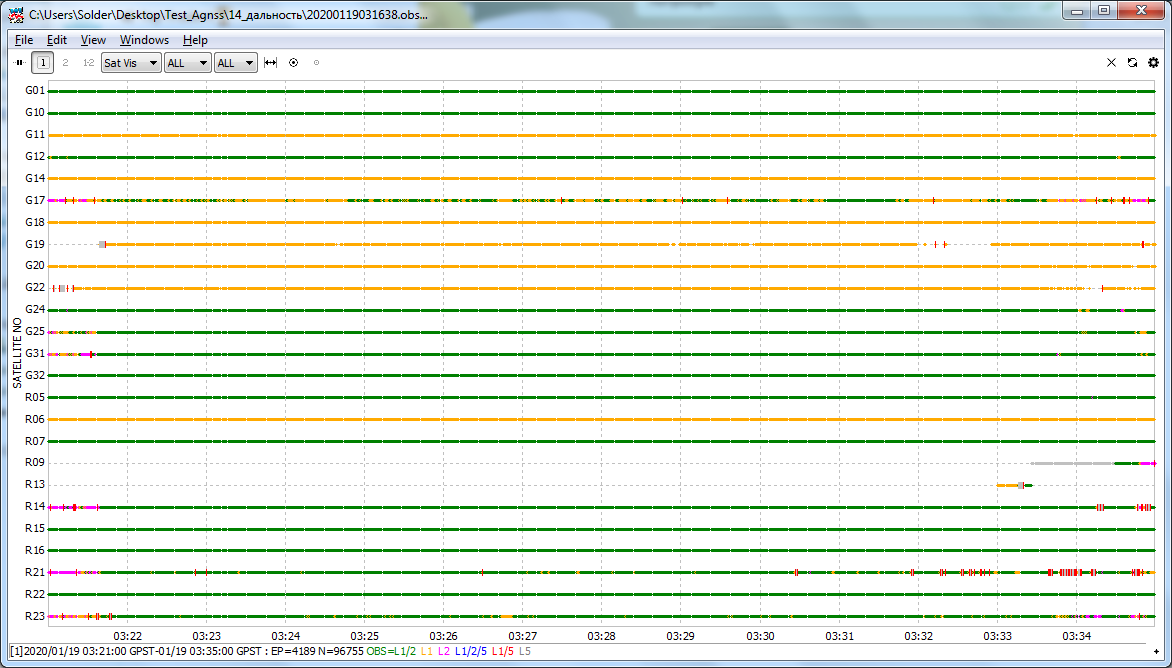
Если в выпадающем меню выбрать SNR/MP/EL (см. скриншот), то можно увидеть качество данных GNSS и наличие в них шума.
Для хорошего результата, SNR должен быть в диапазоне 30-50 дБ/Гц, и не должно быть никаких циклов скольжения.
Настройки визуальной навигации:
Здесь вы можете контролировать, какие датчики включены. Рекомендуется, чтобы все датчики были постоянно включены.
Включение предотвращение препятствий: с этой настройкой ваш самолет будет обнаруживать препятствия перед ним, и он будет ограничивать максимальную скорость до 10 м /с. Предотвращение препятствий может не сработать в условиях низкой освещенности (300 люкс или ниже), и ему будет сложно обнаружить тонкие препятствия, такие как провода.
Включение предотвращение горизонтальных препятствий в Tapfly: если этот параметр активирован, ваш дрон будет летать вокруг препятствий в режиме TapFly.
Включение обратного возврата: если эта функция включена, то дрон будет лететь назад, и распознавать приближающиеся препятствия. Обратите внимание, что дроны DJI, за исключением Phantom 4 Pro, не имеют датчиков заднего препятствия, так что они могут врезаться во что-либо позади него.
Включить предотвращение препятствий на активной трассе: если эта функция активирована, дрон будет избегать препятствий в ActiveTrack.
Отображать радарную диаграмму: если этот параметр включен, приложение будет отображать небольшую радиолокационную диаграмму в левом нижнем углу вида полета, которая показывает ориентацию дрона во время полета.
Расширенные настройки датчиков:
Enabled Vision Positioning: если этот параметр включон, то будут включены датчики, направленные вниз, что поможет удерживать дрон в фиксированном положении при зависании. Если этот параметр все-таки отключен, то Ваш дрон будет дрейфовать при зависании, если сигнал GPS слишком слабый.
Защита от неправильной посадки: при активированной функции, дрон проверит пригодность посадочной площадки, прежде чем приземлиться.
Точная посадка: если функция активирована, то дрон будет пытаться приземлиться именно в том месте, откуда он взлетел с момента запуска RTH.
Проверка препятствий RTH: Если этот параметр включен, дрон будет автоматически подниматься, чтобы избежать каких-либо препятствий, если он обнаружит препятствие во время возврата в точку взлета. Для Spark, если расстояние превышает 100 метров, сдрон не будет избегать препятствий, поскольку он будет лететь слишком быстро.
Настройки камеры (camera settings)
- Режим Авто Auto: автоматическая настройка камеры.
- Диафрагма Aperture (A): здесь можно отрегулировать количество света, поступающее в камеру. Это измеряется в f-показателе. Чем ниже этот показатель, тем больше диафрагма, и, соответственно, больше проходит свет. Чем больше f-показатель, тем меньше света проходит в камеру. В A – режиме, вы можете настроить Диафрагму. Но все остальные настройки будут выставлены автоматически.
- Затвор Shutter (S): затвор контролирует время поступления света на линзы. Чем ниже скорость работы затвора, тем больше света проходит внутрь. Это позволяет делать хорошие фото при тусклом свете. Высокая скорость работы затвора позволяет делать четкие снимки движущихся объектов и людей. В S-режиме вы можете установить скорость работы затвора, но остальные настройки будут выставлены автоматически.
- Ручной режим Manual (M): вы можете настроить Диафрагму и Затвор в ручном режиме.
- Показатель коррекции Экспозиции EV (Exposure Compensation Value): это показатель того насколько далеко вы ушли от рекомендованных настроек при настройке режимов вручную. Например, показатель EV должен быть 0, а вместо этого он 2, значит, что вы получите слишком светлые белые тона. Если этот показатель будет -2, то у вас будут слишком темные тона. Есть ситуации, при которых вам нужны более высокие или более низкие показатели EV. Например, если вам нужно сделать снимок в темноте при низкой скорости затвора, то тогда вам нужно выставить более высокий показатель EV.
Настройки пульта управления (remote controller settings).
Здесь вы можете настроить пульт управления.
- Калибровка пульта управления Remote Controller Calibration: здесь можно настроить управление стиками и переключатели. Вы сможете делать настройки только когда дрон выключен. Чтобы настроить, следуйте инструкциям на экране.
- Режимы стиков Stick Mode: здесь вы можете настроить режимы управления стиками: Режим 2 – встроенный режим, контролирующий как пульт управления, так и виртуальные джойстики.
- Настройка постоянной скорости Set to Fixed-Wing Mode: при включении этой функции, дрон будет лететь вперед автоматически на заданной скорости. Чтобы взлететь, поднимите левый стик вверх. Для посадки опустите его вниз. Направляйте стик вправо, влево, чтобы менять положение дрона.
Обзор функций на экране Remote Controller LCD Screen Introduction: на этом экране показан краткий список функций. Пока это доступно только на модели DJI Mavic Pro.
Пользовательская настройка кнопок Button Customization: вы можете настроить кнопки С1 и С2 под те функции, которые необходимы вам.
Включение и выключение передних светодиодов у квадрокоптеров DJI Turn on/off Front LEDs: для того, чтобы при фотографировании избежать бликов передние светодиоды можно выключить.
- Автофокус AF Lock/Unlock: функция включения/выключения автофокуса
- Особые настройки камеры Advanced camera: быстрый доступ к настройкам ISO, Shutter, и EV.
- Настройка угла камеры Camera Forward/Down: вы можете переключить положение камеры с положения вперед до угла 90°.
- Кнопка для отображения карты Toggle map/live: при нажатии этой кнопки, на весь экран раскрывается карта.
- Удаление маршрута полета Clear flight route function: вы можете удалить с карты полета маршрут, который дрон уже пролетел.
- Информация об аккумуляторе Battery info: показывает напряжение и уровень заряда, которые остались в батарее.
- Воспроизведение Playback: вы можете просмотреть фото и видео, которые уже сняты.
- Центр автофокусировки Centre Auto Focus: вы можете настроить фокус в центре кадра.
- Правый циферблат ISO / Управление затвором Right Dial ISO/Shutter Control: здесь можно настроить функцию правого циферблата (настройка ISO или управление затвором)
Настройки фото photo settings
Здесь вы можете настроить режим съемки Фото.
- Единичный кадр Single Shot: стандартный режим. При одном нажатии на кнопку, вы получаете один кадр.
- Снимок в высоком динамическом диапазоне HDR Shot (High Dynamic Range): при этом режиме настройки, камера сделает три фото за один раз. Одно будет недоэкспонированное, второе – переэкспонированное, а третье с нормальной экспозицией. Затем при наложении друг на друга, получится динамичное изображение в формате JPEG.
- Многократный кадр Multiple: при нажатии на кнопку в этом режиме камера будет делать множество снимков. Вам может понадобиться данный режим, когда необходимо снять движущийся объект.
- Автоматический брекетинг экспозиции AEB (Automatic Exposure Bracketing): здесь можно установить от 3 до 5 кадров. Принцип действия такой же как и при режиме HDR – снимки получаются недоэкспонированные, переэкспонированные и с нормальной экспозицией. Тем не менее, в режиме AEB изображения в формате RAW и не соединены. Таким образом, вам нужно самостоятельно их соединять в специальной программе для редактирования.
- Отсроченный кадр Timed Shot: здесь вы можете настроить таймер перед тем как сделать кадр. Эта функция удобна для селфи.
- Панорама Pano: вы можете быстро сделать панорамный снимок. Также, есть отдельный режим для съемки панорамы (Sphere mode). В этом режиме, дрон будет делать большое количество фотографий, и после соединения этих фотографий вместе вы получите сферическое изображение.
- Мелкий фокус Shallow Focus: этот режим, который позволяет вам создать эффект глубины на вашем фото.
Обработка измерений
Коэффициенты Вашего квадрокоптера оффсеты: X=0, Y=0, z=0,2 F = 3633
Дано:
– Аэрофотосъёмка (фотоснимки с камеры БПЛА) (фотографии имеют грубую геодезическую привязку в поле EXIF).- Данные бортового GNSS приёмника (приёмник одночастотный EMLID Reach M – сырые данные с частотой не менее 5Гц, минимум 5 GPS спутников постоянного слежения на всей траектории полёта).
Общее описание действий:
· Дрон летает и делает фотографии поверхности с некоторым перекрытием – от 50 % между соседними снимками и более – так, чтобы каждый объект реконструируемой сцены был виден минимум с 2х ракурсов. Параллельно он записывает «сырые» данные ГНСС приёмника для получения точного трека его движения.
Сигнал с затвора камеры регистрируется ГНСС приёмником как внешнее событие. Перед обработкой он исправляет аппаратные задержки. Далее эти моменты получают свои координаты на треке с помощью линейной интерполяции.· Данные загружаются в ПО фотограмметрической обработки.
Подгрузив снимки, их точные координаты, параметры смещения между центром камеры и центром антенны, калибровку камеры, программа выравнивает фотографии и строит разреженное облако точек. Вся оценка точности реконструируемой сцены и выходных результатов оценивается именно на нём.
После его постройки подгружаются координаты наземных опознаков для контроля точности на них. При необходимости, они могут быть использованы для посадки модели как опорные. На этом этапе рекомендуется создать отчёт об обработке. Дальше формируются все остальные необходимые элементы проекта.
Планирование маршрута полета
Для получения фотограмметрических материалов требуется произвести полет над всей территорией съемки и собрать достаточное количество качественных фотографий с перекрытием областей, достаточным для того, чтобы фотограмметрическая программа смогла найти общие точки и построить цифровую модель. Для этого можно воспользоваться разными способами:
· Программа планировщик полетов.При использовании программ планировщиков полетов маршрут строится автоматически. Пользователь может изменить величину перекрытия, высоту и скорость полетов.
Примеры программ:
Pix4Dcapture, DroneDeploy, MapPilot, Atizure
Обычно большим функционалом обладают программы с платным контентом.Так, к примеру, планировщик полетов MapPilot, помимо стандартного функционала предлагает:
– работу с KML (удобно выделить зону необходимых полетов);- специальный режим съемки линейных объектов;- возможность полета с учетом рельефа (до 66 широты!).
Большинство программ имеет бесплатный или ознакомительный режим.
Отдельно стоит упомянуть программный продукт UgCS (Photogrammetry tool for land surveying).Это профессиональный продукт для эффективного планирования полетных миссий. Он состоит из модуля, который устанавливается на полетный планшет и модуля, который ставится на компьютер.
При выезде на место работы планшет, по заранее созданной миссии, загружает миссию в БПЛА и предоставляет полный интерфейс по контролю и управлению полетом.
· Ручной режим полета.Такой режим часто предпочитают использовать опытные пилоты, так как он помогает быстрее выполнить задание. При этом дрон взлетает, у него включается автоматический режим по промежутку времени съемки (обычно одно фото за 2 секунды) и осуществляется полет на область съемки. В программе DJI GO 4 видно траекторию полета и ее можно исправлять для покрытия «слепых» зон.
Данный режим можно рекомендовать:
– опытным пилотам;- при небольших объемах съемки;- в условиях, где высок риск сбоя навигационной системы БПЛА.
Также возможно и эффективно использование неспециализированных на задачи АФС планировщиков полетов типа Litchi. Этот тип планировщика не имеет функций построения областей перекрытия, а выстраивает только траекторию движения. Пользователь сам, исходя из своих требований, выстраивает параллельные галсы, а БПЛА летает с автоматически работающей камерой (от 1 кадра в секунду до 2-х).
Программа Litchi имеет интернет ресурс, на котором можно спланировать маршрут на большом компьютере. БПЛА будет летать по оптимальной траектории и не останавливаться на каждой точке разворота, а проходить поворот в вираже, что существенно сокращает время полета и обеспечивает значительно большую производительность.
Подготовка к афс
За день до работы по АФС с БПЛА определите время работы и убедитесь, что будете иметь:
· Достаточное солнечное освещение.
Определите время восхода и захода солнца. Помните что наилучшее время для АФС – близкое к полудню, когда тени от предметов минимальны.
В случае яркого освещения для повышения контрастности фотоснимков возможно использование поляризационных фильтров (CPL) и ультрафиолетовых фильтров (MC UV).
Поляризационные фильтры (CPL) – делают фотографии более контрастными, уменьшая блики, что облегчает процесс фотограмметрической обработки. Следует учитывать, что поляризационные фильтры незначительно уменьшают светосилу объектива (1-2 стопа).
Ультрафиолетовые фильтры (MC UV) – защищают камеру от механических повреждений и защищают фотографии от воздействия ультрафиолета. Это особенно важно при проведении работ в высокогорных областях.
· Хорошие погодные условия
При определение погодных условий прежде всего следует обратить внимание на два фактора: видимость и сила ветра.
Видимость зависит от влажности воздуха. В случае даже минимальных осадков полеты для АФС на БПЛА, подобных DJI Phantom 4, невозможна из-за того, что работающие винты квадрокоптера формируют плотную взвесь капель в области камеры, что делает невозможным получение качественного фотоматериала.
Предельная скорость ветра, при которой рекомендуются полеты – 10 м/с или 36 км/ч. Полеты при таких ветрах лучше не проводить, так как скорость БПЛА против ветра очень мала, а вероятность аварии при посадке или взлете высока.
Количество видимых спутников. Минимальное количество видимых спутников, при которых возможно выполнять АФС с БПЛА – 9. Меньшее число может привести к потере навигационного решения и необходимости перехода в ручной режим управления.
Полноценный прогноз погоды перед планированием полета, а также информацию о ближайших аэродромах и запретных местах, можно получить в программе для планшета или смартфона – UAV Forecast (см. рисунок 1).
Как видно из рисунка, сегодняшний день является неблагополучным по видимости годных для расчета спутниковых позиций.
Пользователи БПЛА DJI Phantom 4 Geobox в таких условиях должны быть готовы перевести дрон из автоматического режима в ручной и выполнить возврат аппарата в ручном режиме. На момент полета погоду следует внести в журнал полетов. Образец страницы журнала полета представлен в приложение 1 к настоящему руководству.
Рисунок 1
________________________________________________________________________________________________________________________________________________
Полет
Не смотря на то, что большинство полетов происходит в автоматическом режиме, внешний пилот БПЛА должен полностью контролировать процесс выполнения задания, не отвлекаться от интерфейса дрона и, по возможности, визуально наблюдать его или видеть видеоизображение, которое он передает.
Для удобства работы рекомендуется пристегивать пульт управления с планшетом ремнем и вешать его на шею: в случае возникновения нештатных ситуация у оператора БПЛА должны быть свободны руки. Рекомендуется иметь под рукой бинокль или монокуляр с хорошей кратностью и большим углом обзора для визуального контроля БПЛА.
После взлета оператор должен следить и проявлять особое внимание к следующим этапам:
1) Взлет и набор заданной высоты.2) Выбор БПЛА правильного курса на точку старта задания (если таковой присутствует). 3) Смена рабочих галсов. В момент смены галса БПЛА точно центрируется над точкой поворота, одновременно вращаясь. Навигационная система дрона в этот момент максимально нагружена. 4) Посадка.
Финальную часть посадки рекомендуется выполнять в ручном режиме и осуществлять посадку дрона на руки оператору или помощнику.5) Смена аккумуляторов. При смене аккумулятора и взлете выждите 2 минуты, для того чтобы модуль Emlid Reach M получил навигационный сигнал и начал работу.6)
При смене и установке аккумуляторов обращайте внимание на правильность установки аккумулятора. Аккумулятор должен прилегать корпусу с минимальным зазором. При смене аккумуляторов обратите внимание на температуру контактной площадки аккумулятора – если рука не может терпеть прикосновения к задней части аккумулятора, то следует прекратить полеты и провести техническое обслуживание контактов.
Состояние системы дрона dji go4:
При входе в режим камеры эта полоса будет одного из трех цветов: красного, желтого или зеленого. Если полоса зеленого цвета, это означает, что у вас хорошее соединение GPS, и вы можете летать безопасно. Если он желтый, то это означает, что Вы должны летать с осторожностью, поскольку дрон может находиться в режиме ATTI, то есть у него недостаточно сигнала GPS для поддержания стабильной позиции.
Если вы нажмете на строку состояния, вы увидите обзор систем дрона следующим образом:
Компас: Это позволяет дрону знать, где он находится, и иногда его необходимо перекалибровать, когда вы начинаете полет из нового места. Обратите внимание на это, поскольку компас очень воспримимчев к электромагнитным помехам.
IMU (Inertia Measurement Unit): По сути, это барометр и гироскоп, используемые дроном для определения его положения и угла во время полета. Если DJI GO 4 предложит вам откалибровать его, следуйте инструкциям на экране.
Состояние ESC (Electronic Speed Control): сообщит вам, есть ли проблема с вашими двигателями. Если вы видите предупреждение, попробуйте перезагрузить Ваш дрон, если предупреждение не исчезнет, вам нужно будет отправить дрон на ремонт.
Датчики облета препятствий: это датчики, которые проверяют наличие препятствий во время полета. Настоятельно рекомендуется всегда держать их включенными.
Состояние обнаружения препятствий: это визуальное предупреждение, которое появляется на вашем экране, когда ваш дрон обнаруживает, что он находится рядом с препятствием.


