

Описание конкурса
Мы принимаем участие в конкурсе ”
” (
Краткое описание робота
Просмотрев огромное количество видео соревнований роботов, мы поняли для себя основные характеристики робота, которые дают преимущества на поле брани:
Так родилась идея создать робота в форме пирамиды с главным орудием в виде спаренного молота для возможности наносить удары в две стороны, двумя малыми молотами по бокам, и вилочным опрокидывателем.
Так же из фич: Отделяемая часть робота, и пилы.
Арена

Бои будут проходить на специальной пуленепробиваемой сцене 10х10 метров со скошенными углами, т.е. фактически это восьмиугольник.
Другие роботы
Большинство роботов имеют богатый опыт участия в соревнованиях, но это только делает задачу выиграть у них еще интересней.
Видео
P.S.: Готовлю вторую часть, так же готовимся к конкурсу автономных роботов-газонокосилок.
P.P.S. (для тех, кто считает, что времени мало):
P.P.P.S.: Наша группа ВК
P.P.P.P.S.: Продолжение статьи
Глава 13 подводные роботы / создаем робота-андроида своими руками
Робототехника подводных устройств развивается по многим направлениям. Большинство подводных роботов создаются для проведения спасательных операций и исследований. В будущем подводные роботы будут помогать осваивать океан для организации рыбной ловли, в фармацевтике, поиске полезных ископаемых и источников энергии.
Подводные роботы могут использоваться также в качестве моделей тестирования роботов, предназначенных для космических исследований. Роботы с нулевой плавучестью являются в определенном смысле невесомыми. В подобных роботах ракетные двигатели моделируются двигателями с гребными винтами. Подводные испытания позволяют имитировать отсутствие трения, наблюдаемое в космическом пространстве. Если вы хотите создать робота, работающего в условиях космоса, то хорошие предварительные результаты можно получить с помощью модели подводного робота. Организация НАСА начала развитие технологий дистанционно управляемых устройств с использованием систем телеслежения (TROV) (см. рис. 13.1) и автономных подводных устройств (AUV). В устройствах TROV в качестве систем дистанционного управления используются системы виртуальной реальности. Технологии телеслежения играют еще более важную роль в исследованиях окружающего пространства и вредном для человека окружении. В будущем технологии телеслежения будут развиваться как в этих направлениях, так и осваивать новые, например индустрию развлечений.

Рис. 13.1 Аппарат TROV NASA. Фотография НАСА.
Были предприняты интересные исследования принципов плавания и плавательных движений рыб. Общеизвестно, что подводные обитатели могут передвигаться и плыть более эффективно и экономично, чем гребной винт может двигать судно. Хотите легко доказать это самим себе? Вы когда-нибудь постукивали по стеклу аквариума, в котором плавают рыбы? Внезапный шум заставляет рыб метаться по аквариуму настолько быстро, что ваши глаза не способны уследить за их перемещениями. Представьте, что вы можете создать корабль, способный перемещаться с подобной быстротой и внезапностью. Поэтому неудивительно, что правительство США финансирует некоторые из этих исследований.
Насколько эффективнее плывет рыба по сравнению с нашими современными способами передвижения по воде? Давайте проведем краткий анализ. В 1936 году британский зоолог Джеймс Грей исследовал дельфинов. Его целью было подсчитать мощность, развиваемую дельфином, чтобы перемещаться со скоростью 20 узлов – скоростью, которую обычно наблюдают у дельфинов. Модель Грея была очень жесткой в предположении, что сопротивление воды для движущегося дельфина остается одинаковым для жесткой и гибкой моделей. Это оказалось неверным, но даже с учетом необходимой поправки, результаты Грея оказались очень любопытными. Оказалось, что его дельфин оказался в 7 раз слабее, чем это необходимо для достижения скорости в 20 узлов. Используя дедукцию, можно предположить, что дельфин каким-то образом способен в 7 раз уменьшить сопротивление воды. Но до настоящего времени точного ответа нет.
За последние 60 лет никто не смог окончательно подтвердить или опровергнуть вычисления Грея. Любой плавающий механизм, имитирующий движения рыбы, оказывается значительно менее эффективным. В последнее время предпринимаются новые исследования для изучения способа плавания рыб. С использованием новых компьютерных технологий ученые надеются получить ответ на этот давно волнующий вопрос.
В последние несколько лет ученые Массачусетского технологического института исследовали голубого тунца. Они создали модель робота-рыбы длиной 120 см, которая плавает в специальном бассейне для проверки ходовых качеств судов. Робот-рыба похож на настоящую рыбу. Шкура рыбы сделана из специальной пены и покрыта лайкрой. В роботе использованы шесть внешних двигателей, соединенных со шкивами и «сухожилиями» внутри робота. Движение рыбы напоминает плавание настоящего голубого тунца.
Хвост рыбы можно рассматривать как подводное крыло. При движении хвоста из стороны в сторону он отбрасывает поток воды назад и соответственно движет рыбу вперед. Во время движения хвоста в воде за ним образуются вихри. Есть основания полагать, что принцип образования этих вихрей может быть ключом к пониманию эффективности передвижения рыбы.
Дельфины интересны тем, что их хвост – подводное крыло расположен горизонтально. Он не перемещается из стороны в сторону как у рыбы, а совершает движения вверх-вниз. Такие движения в той же степени эффективно толкают тело дельфина вперед.
Пингвины плывут с помощью толчков их крыльев. Вид пингвина, плывущего в воде, сильно напоминает полет птицы. Однако существует разница. При полете птица взмахами крыльев должна поддерживать тело в воздухе, а также обеспечивать движение вперед. Создание подъемной силы необходимо для преодоления силы притяжения. Для пингвинов подъемная сила не нужна. Плотность воды равна плотности тела пингвина (нулевая плавучесть), поэтому пингвин машет крыльями только для продвижения вперед.
Рассматривая способы передвижения в воде, мы должны включить сюда использование лопастей и весел. При движении по воде утки используют перепончатые лапы в качестве лопастей. Водомерки используют ножки в качестве весел и двигаются вперед, как маленькие лодки.
Исследования в МТИ привели исследователей к идее использования жидкостного динамического параметра, известного как индекс Строхала. Для рыбы этот параметр вычисляется умножением частоты взмахов хвоста рыбы на ширину образующегося вихря, деленную на скорость рыбы. Были исследованы рыбы разных пород. Оказалось, что КПД у рыбы максимален, когда индекс Строхала лежит в пределах 0,25-0,35.
Когда плавники робота-рыбы, созданной в МТИ были переделаны и настроены так, что индекс Строхала попал в этот диапазон, КПД устройства возрос более чем до 86 %. Это большое достижение по сравнению с гребными винтами, обеспечивающими КПД не более 40 %.
B этой главе рассмотрены два основных проекта подводных роботов. Один из них предусматривает переделку игрушечной подводной лодки, а другой – изготовление робота-рыбы из подручных материалов.
Модели игрушечных подводных лодок производятся и продаются многими компаниями. Их возможности зависят от степени сложности модели, но обычно они управляются по радио и способны погружаться и всплывать (см. рис. 13.2).
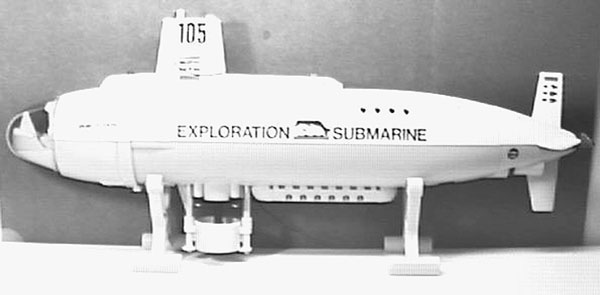
Рис. 13.2. Игрушечная подводная лодка готова к переделке в TROV
При переделке игрушечной подводной лодки я советую отказаться от радиоуправления и перейти к управлению по проводам с использованием соответствующего кабеля. По специальному кабелю можно подвести к подводной лодке питание и управляющие сигналы.
Такие подводные лодки для «хобби» могут быть превращены в небольшие системы телеслежения. Первоначальной переделкой может быть установка цветной видеокамеры. Большинство из подобных лодок имеют пустые отсеки, куда можно установить электронную схему (см. рис. 13.3).

Рис. 13.3. Открытый отсек для размещения электронных компонентов
В подводную лодку можно установить большинство блоков, использованных в автомобиле с дистанционным управлением (см. гл. 9). Единственным отличием является управление по проводам вместо радиоканала.
Подводная лодка является игрушкой, поэтому лучше не запускать ее в открытые водоемы. Крошечные водяные движители в таких лодках могут работать только в спокойной воде. Конечно, создание такой лодки может служить началом для более совершенных конструкций.
Существуют ли какие-либо другие способы использования подобных лодок, кроме использования их в качестве подводных «наблюдателей»? Я могу вообразить себе 10 или более подводных лодок в одном бассейне, причем, каждой управляет отдельный оператор. Я уверен, что на этой базе можно создать множество подводных или «космических» сценариев интересных игр.
Как уже утверждалось ранее, устройства, имитирующие движения рыб, имеют очень низкий КПД. Эта модель не является исключением. Однако тщательный сбор информации источников типа МТИ может способствовать созданию модели (здесь этого не сделано) с гораздо большим КПД. И если кто-то хочет изготовлять роботов-андроидов, имеющих форму животного, то можно начать именно с этого проекта.
Кольцевые соленоиды
Движение робота-рыбы обеспечивается с помощью кольцевого соленоида (см. рис. 13.4). При включении питания верхняя часть соленоида поворачивается на угол примерно 30°. При отключении питания пружина возвращает механизм в исходное положение.

Рис. 13.4. Открытый отсек для размещения электронных компонентов
В верхней части соленоида находятся, по крайней мере, два резьбовых отверстия 1,6 мм, которые могут быть использованы для крепления деталей. В нижней части соленоида имеются две стойки с резьбой 1,6 мм для крепления соленоида. Соленоид оказался не таким мощным, как мне бы хотелось, но его все же достаточно для обеспечения подводного продвижения.
Электрическая схема
Для генерации медленной последовательности импульсов в схеме использован однопереходный транзистор Q1 (UJT2646) (см. рис. 13.5). Частота импульсов определяется номиналами C1 и R1. Импульсы подаются через резистор R2 на базу Q2. Q2 представляет собой NPN транзистор типа 2N2222. Транзистор Q2 используется для подачи инвертированного импульса на вывод 2 ИС 1. ИС 1 представляет собой таймер 555, включенный по схеме одновибратора. Форма и длина импульса определяются ИС 1. Выход таймера 555 управляет включением транзистора Q3. Транзистор Q3 управляет током, протекающим через кольцевой соленоид, использованный в роботе.

Рис. 13.5. Принципиальная схема устройства
Питание схемы осуществляется с помощью батареи 9 В. Схема достаточно проста и монтируется на печатной плате.
Проверьте работу схемы, соединив ее с соленоидом перед дальнейшей сборкой. Постоянная времени работы соленоида должна быть в районе 1 с.
Механика
Для снижения общей массы и веса устройства большинство деталей выполнено из алюминия. Первый вариант механизма, передающего движение соленоида к машущему хвосту «рыбы», изображен на рис. 13.6. Оказалось, что такой механизм сложнее, чем требуется. Окончательный вариант привода хвоста показан на рис. 13.7.
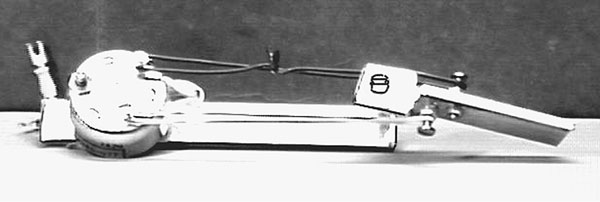
Рис. 13.6. Первоначальный привод движения хвоста
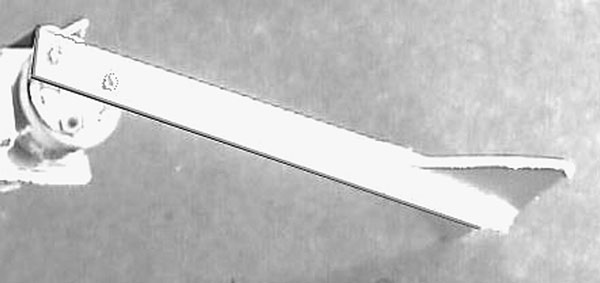
Рис. 13.7. Окончательный вариант привода
Полоса алюминия размерами 3х 12х 140 мм прикреплена к верхней крышке соленоида при помощи двух винтов 1,6 мм и длиной 6 мм. Просверлите сперва два отверстия в алюминиевой полосе, совпадающие с положением отверстий в верхней части соленоида. Затем, чтобы предотвратить излишне глубокое вворачивание винтов в соленоид, предварительно наверните на каждый винт гайку до упора. Если винты слишком глубоко ввернуты в верхнюю подвижную часть соленоида, то они будут препятствовать ее легкому вращению. Прикрепите алюминиевую полосу к подвижной части соленоида.
Плавник хвоста сделан из квадратного кусочка алюминия 30 мм, разрезанного по диагонали. Плавники крепятся к основанию 12 мм с помощью достаточного количества термоклея. Для лучшего контакта можно предварительно зачистить поверхности с помощью наждачной бумаги.
Соленоид крепится к задней части алюминиевой пластины размерами 3x30x50 мм на двух задних стойках 1,6 мм с помощью нескольких гаек. К передней части крепится плата электрической схемы и батарея (см. рис. 13.8).
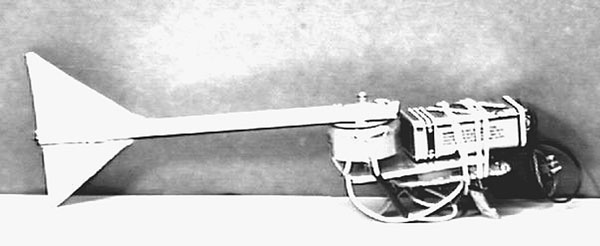
Рис. 13.8. Робот-рыба в сборе
Гидроизоляция
Мы изготовили привод соленоида и электрическую схему. Для исключения попадания воды, которая может привести к порче устройства, необходимо завернуть плату соленоида в тонкую прозрачную пленку, используемую в кулинарии. Чехол из пленки крепится к хвосту с помощью проволоки. Крепление должно обеспечивать легкое поперечное перемещение хвоста.
Перед тем как опускать устройство в воду, ему необходимо обеспечить нулевую плавучесть. Если вы опустите его в воду «как есть», то передняя тяжелая часть робота «спикирует» на дно, а взмахи хвоста будут осуществляться «в воздухе». При помощи резиновой ленты прикрепите полоски пенопласта к передней части модели поверх прозрачного чехла. Положите модель в воду для проверки. Добейтесь горизонтального или почти горизонтального положения равновесия. После этого можно включить модель и отпустить ее в «плавание».
Эффективность модели
Данная модель робота не обладает КПД настоящей живой рыбы, хотя и обеспечивает движение. Я думаю, что КПД устройства можно повысить, распилив алюминиевую хвостовую пластину 12х 140 мм пополам, и затем соединить половины с помощью пружины 50 мм. Такая пружина позволит хвосту поворачиваться и изгибаться, что может обеспечить больший КПД передвижения.
Робот отличается от андроида своим внешним видом. Если робот выглядит как «робот», то андроид копирует облик человека или иного живого существа. По этой причине андроидная рыба должна иметь вид рыбы.
Создание рыбы-андроида не столь сложно, как это может показаться на первый взгляд. Причина в том, что можно приобрести достаточно хорошо сделанную искусственную «шкуру» рыбы (см. рис. 13.9). Подобные предметы продаются в магазинах «хобби» и иллюзионного реквизита. Такая рыба может быть «вспорота» для установки внутри соответствующего механизма.
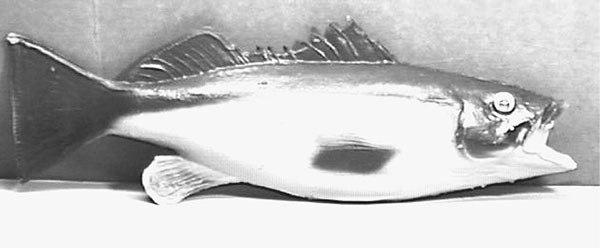
Рис. 13.9. Робот-рыба, заключенный в оболочку резиновой рыбы
Некоторые типы подобных муляжей выглядят более натурально. Я нашел модель, сделанную из толстой и мягкой резины. Такая «рыба» на вид и на ощупь очень реалистична, но требует более мощной «начинки», чтобы она могла двигаться. Лучшим выбором могут служить менее натуральные муляжи рыб, имеющие более тонкую шкуру и, следовательно, требующие меньше усилий для их передвижения.
Чтобы больше узнать об устройствах, использующих принцип движения рыб, вы можете прочитать следующие статьи: Scientific American, March 1955, «An Efficient Swimming Machine» by Micheal S. Triantafyllou и George S. Triantafyllou, и Exploring Biomechanics, by R.McNeill Alexander, опубликованная в Scientific American Library, 1992, ISBN 0-7167-5035-X.
• R1 33 кОм
• R2 и R6 100 Ом
• R3 470 Ом
• R5 10 кОм
• R7 15 кОм
• Q2 транзистор NPN 2N2222
• Q3 TIP 120 NPN Darlington
• IC1 таймер 555
• C1 и C2 22 мкФ
• С3 0,01 мкФ
• Кольцевой соленоид $5,95
• Q1 2N2646 UJT $5,95
• Алюминиевая полоса 3х12х150 мм
• Алюминиевая полоса 3х30х50 мм
Детали можно заказать в:
Images SI, Inc.
39 Seneca Loop
Staten Island, NY 10314
(718) 698-8305
http://www.imagesco.com
Главная |
Контакты |
Прислать материал |
Добавить в избранное |
Сообщить об ошибке
Двигатели
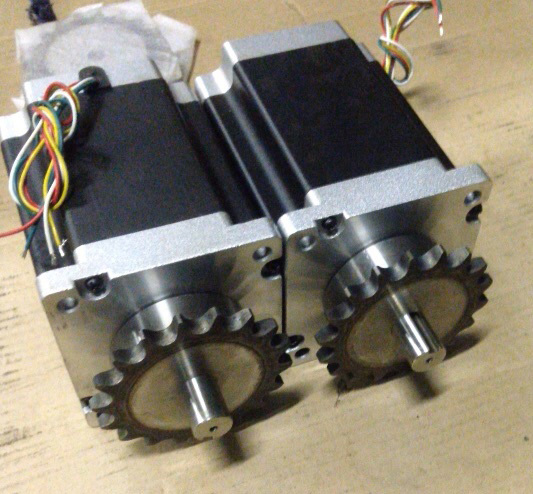
У нас была очень большая надежда на шаговые двигатели Nema 43. По заявленным характеристикам они нам подходили, мы варили под них раму. При подключении оказалось, что справится с какой-либо нагрузкой они не смогут. В срочном порядке пришлось искать другое решение. Мы нашли двигатели 36В 500Вт и уже переделали раму под них.
Как сделать радиоуправляемый катер для доставки прикормки на рыбалке
Самоделка будет очень полезная для рыбаков. С помощью нее можно точно и практически бесшумно доставлять прикормку при рыбалке. В качестве основы для создания самоделки автор взял катамаран. В итоге получилось надежное, мощное судно, которое не боится водорослей и других подобных препятствий, чего нельзя сказать о дешевых китайских катерах. Конечно, в продаже имеются и более качественные модели, но за них, и заплатить придется внушительную сумму, но зачем платить больше, ведь отличный катер можно собрать и самому, к тому же это интересно.
Материалы и инструменты для сборки:
– фанера, коропласт, пластик (или другие материалы для создания корпуса на выбор);
– горячий клей;
– алюминиевый профиль (из него делается силовой каркас);
– монтажная пена;
– моторы типа XK2845-B-3700KV;
– дейдвудная труба;
– два регулятора для лодок Birdie 50A с 3A BEC (или подобный);
– аппаратура для радиоуправления;
– аккумулятор и зарядное устройство (подойдут два аккумулятора B-Grade 4000mAh 3S и зарядное HobbyKing Variable 6S 50W 5A);
– разъемы HXT 4mm Gold Connector;
– режущий инструмент, паяльник, краска и прочее.
Процесс изготовления самоделки:
Шаг первый. Корпус катера
Корпус катера можно собирать из различных материалов. Вполне подойдет и фанера, которую потом можно обклеить стеклотканью на эпоксидной смоле. Предпочтительнее всего конечно использовать пластик, так как он легкий, с ним просто работать, и он не боится влаги. Корпус склеивается встык. Затем снаружи в местах стыка приклеивается ткань для герметизации.
Сверху на катер устанавливается силовой каркас, он делается из алюминиевого профиля. Он позволяет равномерно распределить нагрузку по всему корпусу. Также этот каркас выступает в качестве ручки для удобного переноса катера. Носовые части автор заливает монтажной пеной, так что даже в случае протечки корабль не потонет. Аналогичную процедуру можно сделать и с кормовыми отсеками после того, как будет установлена дейдвудная трубка.
Шаг второй. Движущая сила катера
Катер приводится в действие водометным движителем. Такая конструкция хороша тем, что катер не боится водорослей, так как они не контактируют с движущимися механическими частями. Состоит такой движитель из трубы, в которой находится винт. Сама труба закрыта решеткой.
Шаг третий. Электроника катера
Чтобы внутрь судна не проходила вода, необходимо установить дейдвудную трубку, а также набор из гребного винта, вала и соединительной муфты. В качестве моторов здесь используются XK2845-B-3700KV.
Для управления моторами понадобятся два регулятора типа Birdie 50A с 3A BEC, они имеют водное охлаждение, а также реверс хода, что позволяет разворачивать катер.
Чтобы открывать коробки с прикормкой, нужно будет две сервомашинки. Впрочем, если оба отсека будут открываться одновременно, будет достаточно и одной сервомашинки. Серводвигатели должны быть в пыле- и влагозащищенном корпусе, можно успешно использовать HK-15139.
Для радиоуправления используется Turnigy 9x на 9 каналов.
Что касается источника питания, то здесь используются два аккумулятора B-Grade 4000mAh 3S или же можно взять два подороже типа Turnigy nano-tech 4000mah. Чтобы подключить регуляторы к аккумуляторам понадобятся разъемы HXT 4mm Gold Connector.
По словам автора, самоделка обошлась ему в 5 870 рублей. Если сравнивать с магазинными ценами, то здесь нужно выложить уже все 30 000 рублей. Но это не качественные катера со щеточными двигателями, которых хватает примерно на 20-30 поездок. Затем нужно менять либо щетки, либо моторчики. Также здесь используется устаревшая аппаратура, которая работает в FM-диапазоне. При такой связи возможны помехи и управление катером можно легко потерять.
В итоге после покупки нового катера обычно начинают менять двигатели, устанавливая бесколлекторные, а вместе с ними приходится менять и регуляторы. Также со временем приходится менять и радиопередатчик. Быстро выходят из строя и аккумуляторы, которые здесь свинцовые. В итоге человек покупает за 30 000 лишь корпус катера и пару сервомашинок, которые стоят не более 300 рублей. Так что, для тех, кто решил заиметь такую вещь, куда выгоднее будет собрать катер самому.
Еще можно приобрести дешевый катер за 2-3 тыс. рублей, сделать по бокам дополнительные поплавки и установить отсеки для доставки корма. А открывать отсеки можно с земли рывком за прочную нитку или леску. Это самый дешевый вариант для создания подобной самоделки.
Каркас, форма, сборка
Разрезаем профиль
Варим раму
Колеса со строительного рынка
Наша команда

Каждый член команды делает все от него зависящее для достижения светлого будущего, но особо хочется выделить работу Саши и Андрея. Они вкладывают в робота все свое свободное время. То, что наш робот уничтожит всех остальных — это именно их заслуга!
Орудия
Главный молот. Над дизайном главного молота-кирки думаем и спорим.
В качестве пил мы решили использовать двигатели кошения и ножи от Robomow. Во-первых ножи сделаны из прочной стали, а двигатели дают хороший момент и количество оборотов. Во-вторых Robomow согласились нас спонсировать ими.
Пневмосистема
Пневмосистема в разборе:
Главной идеей было использовать для каждого двуходового цилиндра по 4 клапана, которые перекрестно соединены. Когда мы открываем клапан для наполнения цилиндра с одной стороны открываем для стравливания клапан с противоположной стороны.
Для управления клапанами решили использовать такой модуль с 8 реле, которых как раз хватает для 16 попарно-соединенных клапана, т.е. для 4 цилиндров.
Радиоуправление
Радиуправление происходит через 8-канальную радиоаппаратуру для основного оператора, 4 канальную аппаратура для оператора орудий и 2-канальную аппаратуру отделяемой части.
Обработкой ШИМ-сигнала с пульта занимается Arduino (Душа моего робота-газонокосилки). Проблема с обработкой заключалась в том, что на подсчет ШИМ-сигнала с 8 каналов уходит много времени. Выполняя это в основном цикле программы, оказывалось невозможно отправлять на драйверы двигателей адекватное количество пульсов для движения.
Решением было выведение работы с шаговиками в функцию запускаемую по таймеру и изменением параметров таймера в основном цикле. Сейчас уже оказывается все это не нужно, коллекторными двигателями мы управляем через драйвер, на который будем подавать ШИМ, который смело можно изменять в основном цикле программы.


, цена 4600 руб")




