

Основы использования бпла для фотомоделирования
Фотограмметрия или фотомоделирование — это технология, благодаря которой трехмерная цифровая поверхность может быть восстановлена из серии фотографий. Он часто используется для создания высокоточных 3D-моделей объектов реального мира, таких как эта древнегреческая бронзовая скульптура:
Лучший способ подумать о фотомоделировании объекта или ландшафта с помощью БПЛА — это представить, как бы вы приблизились к объекту, если он был очень маленьким, и вы смогли сфотографировать его с помощью карманной камеры. Например, на приведенной ниже диаграмме, иллюстрирующей фотосъемку для фотомоделирования, снимаются фотографии с различными высотами и углами в 360-градусном охвате.

Фотосъемка для фотомоделирования объекта.
Захват изображений с дрона работает практически так же. Камера должна быть настроена на временной режим (фото снимается каждые 2 или 5 секунд) или дистанционно запускается через контроллер БПЛА (при фотосъемке пилот нажимает кнопку захвата). Если вы сканируете один «объект», например здание или колонну, лучше всего работают фотографии POI, то есть камера указывает на интересующий объект, а окружающий ландшафт игнорируется.
Однако, если вы заинтересованы в захвате местности или географической функции, лучше всего использовать ортографические изображения. Ортографические фотографии — это то место, где камера указывает прямо на землю, а дрон (беспилотный летательный аппарат) пролетает по сетке в интересующей области.
Объединение аэрофотографических, POI и карманных фотографий.

POI Фотографии обелиска.
БПЛА, перечисленные выше, могут летать от 15 до 30 минут, что обычно достаточно для сбора не менее 200 — 400 фотографий объекта или ландшафта, в котором вы летали. Конечно, если у вас несколько батарей, можно объединить фотографии с несколькими перекрывающимися полетами, чтобы можно было отсканировать даже очень большие области или объекты.
4 Регулятор ориентации коптера
Углы φ крена и θ тангажа являются одними из самых важных для коптера т.к. отвечают за стабилизацию его положения в пространстве, и должны иметь самый высший приоритет среди других каналов управления. Поскольку коптер симметричен, то регуляторы с точностью до осей симметрии похожи друг на друга.
В стабильном состоянии по каждой из осей 

 Рисунок 19. Регулятор кренаРисунок 20. Коэффициенты блока типа «Размножитель» в регуляторе крена
Рисунок 19. Регулятор кренаРисунок 20. Коэффициенты блока типа «Размножитель» в регуляторе крена
Аналогично выполнен и регулятор по каналу тангажа (представлен на рисунке 21).
Рисунок 21. Регулятор тангажаРисунок 22. Коэффициенты блока типа «Размножитель» в регуляторе тангажа
Конкретные значения на линиях регулятора, пропорциональных углу, угловой скорости и угловому ускорению (моменту сил) подбираются численным экспериментом для данного коптера (с конкретными массой, моментами инерции по осям, двигателями, размером рамы и т.д.).
5 Регулятор положения коптера в пространстве
Итого, регулятор ориентации коптера и регулятор высоты, работая совместно, обеспечивают «висение» коптера в определённой точке пространства в состоянии динамического равновесия. При этом, у коптера еще остается некоторый запас управляемости, который позволяет ему двигаться целенаправленно вдоль координатных осей. Но данные регуляторы несколько сложнее чем регулятор ориентации.
Во-первых, они работают в системе координат В, а в общем случае коптер вращается в пространстве (по курсу) и направления осей x и y системы В не совпадают с такими же осями в системе I. Поэтому рассогласование его позиции в системе I надо переводить в систему В и дополнительно подготавливать задание на регулятор положения по осям x и y.
Во-вторых, рассогласование в этом регуляторе может быть как небольшим, так и значительным, а обычный ПИД-регулятор, как правило, не может одинаково эффективно работать с малыми и с большими отклонениями, требуется доработка регулятора – например, переключение регулятора положения в режим поддержания постоянной скорости при каких-то условиях.
В-третьих, у классического коптера с винтами, расположенными в одной плоскости и параллельными силами тяги, направленными вверх, практически нет возможности создавать боковую силу тяги – т.е. по существу, коптер является неуправляемым по осям X и Y. В нашем варианте, когда винты довернуты еще на 3 градуса вокруг своих лучей, у них появляется небольшая сила тяги направленная в стороны, и микшированием двигателей можно создавать боковую силу тяги. Однако, она очень несущественна, почти нулевая – об этом свидетельствуют большие числа в 1 и 2 колонках матрицы 2). С точки зрения управления, это слишком большая величина. Поэтому коптеры управляются по направлениям X и Y при помощи других каналов управления – поворачиваясь вокруг осей X и Y (об этом напишем дальше).Но структурно – если делать регулятор по каналам Х и Y типовым образом, регулятор может быть выполнен аналогично регуляторам ориентации – на выходе формируется управляющее воздействие по каналу X (Y) и домножается на вектор – 1 (или 2) колонку матрицы 
Один из вариантов регулятора по каналу X и Y представлены на рисунке 23 и 24.
Рисунок 23. Регулятор по каналу ХРисунок 24. Регулятор по каналу Y
Регуляторы двухрежимные, при отклонении от заданной позиции более чем на 5 метров, переключаются в режим работы «V» и поддерживают скорость по направлению на уровне REGX_OGRV (или REGY_OGRV) м/с. При этом, интегрирующая ветка регулятора отключается. При переходе в режим позиции, интегрирующая ветка включается в работу с некоторой задержкой – чтобы коптер успел подлететь к заданной точке и не набралась существенная величина на интеграторе за время «подлета».
Но, отметим еще раз – такой подход будет справедлив и оправдан при существенной управляемости коптера по горизонтальным осям, что может быть достигнуто относительно большим наклоном винтов от вертикальной оси.
Приведенные здесь регуляторы, хотя и кажутся сложными на первый взгляд, являются только лишь базовыми версиями, которые позволяют управлять коптерами. Дальнейшая разработка модели может (и должна) привести к более сложным регуляторам и к повышению качества переходных процессов.
В сумме, на выходе всех 6 каналов управления (по курсу регулятор во многом аналогичен регуляторам ориентации и для сокращения материала не приводим его здесь) мы имеем по каналу регулятора высоты некоторую «базовую» желаемую частоту вращения для каждой из 8 ВМГ, и некоторую «добавку», сформированную остальными 5-ю каналами управления.
Единственный нюанс – микшированные добавки, т.к. это не прямая добавка к частоте вращения, а добавка к квадрату частоты вращения, и для того чтобы вычислить добавку именно к частоте вращения, надо еще дополнительно проделать несложные математические вычисления, см. рисунок 25:
Рисунок 25. Суммирование каналов управления
Сложность вычисления в том, что добавка частоты вращения зависит и от нужного квадрата добавки, и от самой базовой частоты вращения – и чтобы вычислить итоговую частоту вращения как сумму базовой и добавки надо предварительно сделать еще ряд вычислений:
где квадраты скоростей – это сигналы, выходы каналов управления.
Таким образом, в зависимости от текущего уровня «базовой» частоты вращения (которая определяется в основном массой коптера и, возможно, груза и получается на выходе из регулятора высоты), определяется нужная «добавка» угловой скорости для каждой из ВМГ, суммируется с базовой частотой вращения и отправляется как задатчик на регулятор двигателя каждой из ВМГ.
Интерфейс
Все шаги, необходимые для реконструкции 3D-модели из фотографий, собраны во вкладке меню «Workflow», как показано ниже:
По порядку: 1) Добавление фотографий в проект, 2) Выровнять фотографии, 3) Построить плотное облако точек, 4) Построить трехмерную полигональную модель из облака точек и 5) Создать текстуры. Этот процесс, конечно, значительно упрощен: существует ряд действий, которые вы можете предпринять, чтобы получить лучший результат и оптимизировать свою модель.
Давайте рассмотрим шаги более подробно:
1) Добавление фотографий. Чтобы добавить фотографии, которые вы хотите использовать для создания 3D-модели, вы можете использовать кнопку «Add Photos…» в меню Workflow, чтобы открыть обзор файлов, где вы можете выбрать фотографии, или вы можете просто выбрать фотографии и перетащить их на панель «Workspace» в левом нижнем углу. Когда вы добавите фотографии, Photoscan создаст «Chunk» и отобразит количество добавленных вами фотографий.
2) Выравнивание фотографий: выбор «Align Photos…» вызывает диалоговое окно с параметрами для выравнивания. Я всегда использую «Highest» для настройки точности и «Generic» выбор пары. Аэрофотосъемка имеет множество полезных функций — ПО для фотомоделирования любит фотографии травы, земли, дорог и других «органических» неповторяющихся поверхностей.
Когда вы нажмете «ОК» в диалоговом окне «Align Photos», Photoscan найдет похожие точки на всех ваших фотографиях и восстановит позиции камеры в трехмерном пространстве. Он также создает «разреженное облако точек», которое будет состоять из 50 000-200 000 или около того точек в зависимости от ваших настроек и количества фотографий:

«Разреженное» облако точек в Photoscan после выравнивания изображений.
Сначала все кажется непонятным, но если использовать поворот «gizmo» (прозрачная сфера с красными, зелеными и синими линиями на ней), чтобы немного повернуть изображение, вы, вероятно, начнете понимать, где находится вверх, а где низ. Если ваш БПЛА не помещает фотографии с данными GPS в EXIF, модель не будет иметь собственной ориентации.
Теперь самое подходящее время для установки ограничивающей рамки, чтобы не тратить время на части, которые не интересны. Это можно сделать, используя кнопки «Resize Region» и «Rotate Region». Обычно я устанавливаю «Region» для охвата части облака точек, которая содержит объект или область, в которой я хочу создать модель. Это экономит время обработки и уменьшает объем ручной работы по редактированию, которая может потребоваться позже.
3) Build Dense Cloud: Это, возможно, самая интенсивная вычислительная часть обработки. В диалоговом окне «Dense Cloud» вы можете выбрать параметры качества и глубины. Если в вашем компьютере меньше 32 ГБ ОЗУ, я бы не рекомендовал переходить за «Medium» качество.
Предупреждение: как только вы нажмете «ОК» в этом диалоговом окне, Photoscan будет использовать почти всю оперативную память вашего компьютера, что очень затрудняет работу над чем-либо еще. Я обычно оставляю процесс на ночь, или когда я знаю, что мне не нужно будет использовать компьютер.

Полученное плотное облако точек.
4) Build Mesh: если у вас есть плотное облако точек, возможно насчитывающее миллионы точек, можно построить трехмерную полигональную модель. Я всегда удостоверяюсь, что в этом диалоговом окне отмечена «interpolation enabled». В зависимости от размера облака, построение полигональной модели может занимать от 10 минут до нескольких часов.
Результатом будет трехмерная модель с обозначением вершин, полученной из фотографий. Перед созданием текстуры можно использовать инструменты выделения, чтобы обрезать любые ненужные части модели, также используйте «Close Holes», чтобы заполнить любые небольшие отверстия в модели, используйте «Gradual Selection», чтобы удалить небольшие скопления посторонней геометрии и используйте функцию «Decimate Mesh», чтобы уменьшить полигональную модель до допустимого размера для загрузки в Sketchfab.
Вот важные шаги, которые позволяют сделать вашу модель презентабельной и простой в использовании, поэтому рассмотрю каждый из них:
- Photoscan имеет прямоугольную область выделения и инструмент лассо для выбора и удаления частей полигональной модели (или плотного облака или разреженного облака). Можно использовать их, чтобы дать модели ровные края или удалить любые области, которые не нужны, с помощью кнопки «Delete».
- «Close Holes», находится в разделе «Tools -> Mesh -> Close Holes …» Здесь можно использовать слайдер для закрытия небольших отверстий, средних отверстий или всех отверстий в полигоне. Редко я использую опцию на 100%.
- Можно удалить постороннюю геометрию с помощью «Gradual Selection…», который находится в «Edit-> Gradual Selection…». Отрегулируйте ползунок, пока не будут выделены красные точки посторонней геометрий, расположенных вокруг основного полигона, а затем удалите их.
- Можно уменьшить размер полигональной сетки, чтобы легко загрузить ее на Sketchfab и легко просматривать свою модель на мобильных устройствах, используя функцию «Decimate Mesh». Здесь можно уменьшить количество полигонов в модели с 2-3 миллионов до 300-400 000. Это можно найти в «Tools -> Mesh -> Decimate Mesh …»
Build Texture:
теперь, когда мы немного очистили нашу модель и уменьшили ее размер, мы готовы ее текстурировать. Текстуры — это то, где сильно уменьшенные модели получают много деталей. Текстуры основаны на сделанных вами фотографиях, поэтому полученная модель будет иметь тени, которые были там, когда вы фотографировали.
Используйте «Build Texture …» в разделе «Workflow» для доступа к диалоговому окну. Здесь вы можете установить размер текстуры и количество текстур, которые вы хотите сгенерировать. Обычно я устанавливаю размер 2048, 4096 или 8192 и выбираю от 1 до 10 текстур, в зависимости от количества фотографий в проекте.
Теперь мы готовы экспортировать нашу модель и загрузить ее на Sketchfab! Photoscan имеет возможность загружать модели в один клик на Sketchfab. Эту опцию можно найти в разделе «File -> Upload Model …». Кроме того, вы можете просто экспортировать модель в виде OBJ, FBX или другого формата и загрузить ее на Sketchfab.
Чтобы добавить окончательный блеск и презентабельность вашей модели в программе просмотра Sketchfab, перейдите в «Settings» -> «3D Settings» (см. ниже), чтобы настроить ориентацию, материал и освещение.
Позиционирование
На первый взгляд, о чем тут писать — какие-то направляющие, которые толкают дрон в нужную точку. Но, оказывается, здесь целый букет идей и можно проследить несколько направлений мысли конструкторов.
Итак, посадочные платформы можно разделить на:
Сначала нужно сказать, что есть посадочные платформы без устройств позиционирования вовсе. БПЛА приземляется на площадку с точностью, обеспечиваемой системой управления БПЛА. Обслуживающие устройства БПЛА, входящие в состав посадочной площадки, должны иметь возможность обслуживать БПЛА в том положении, в котором он стоит после посадки.
Платформы с активным позиционированием имеют в своем составе механизмы и устройства, которые перемещают БПЛА в нужное положение и поворачивают его в нужном направлении — толкатели различных типов. Механизмы выбираются в соответствии с требованиями к точности и скорости позиционирования.
Для платформ с пассивным позиционированием отсутствуют приводы для перемещения БПЛА: горизонтальное перемещение БПЛА для позиционирования во время посадки обеспечивается преобразованием его вертикального движения. Пассивные устройства позиционирования включают в себя воронки, откосы, наклонные края и т.д.
Каждое из вышеперечисленных устройств имеет свои особенности и ограничения. Комбинация устройств позиционирования помогает достичь лучших результатов, используя преимущества каждого метода.
Платформы были классифицированы как платформы с нестандартными устройствами позиционирования, в случае необычных устройств посадки или методов позиционирования, которые не перечислены выше. Однако они могут быть активными, пассивными и комбинированными.
Каждый тип устройств позиционирования можно разделить на подтипы, которые показаны на рисунке выше и немного более подробно рассмотрены далее.
Все типы платформ at a glance и частота их использования в патентах
Управление движением квадрокоптера по заранее заданной траектории
УДК 681.51
УПРАВЛЕНИЕ ДВИЖЕНИЕМ КВАДРОКОПТЕРА ПО ЗАРАНЕЕ ЗАДАННОЙ ТРАЕКТОРИИ П.А. Гриценко, А.С. Кремлев, Г.М. Шмигельский
Разработан программный продукт, включающий в себя визуализатор и программу управления квадрокоптером, способную решать задачу формирования и отслеживания траектории полета. Приложение предназначено для системы управления квадрокоптером в автоматическом режиме в местах, где невозможно использовать сигнал от спутника (GPS) или сторонних датчиков, но известен подробный план местности или здания, а также при решении задач, где возникает необходимость вмешательства человека. Реализация разработанного алгоритма на квадрокоптере позволяет избежать постоянных обменов сигналами со станцией; как следствие, снижается потребление электроэнергии приемника и повышается время полета. Апробация программного приложения была выполнена на квадрокоптере Ar Drone компании Parrot. В результате работы программы квадрокоптер повторил заданную траекторию с погрешностью не более 5%.
Ключевые слова: квадрокоптер, траекторное управление, БПЛА, полет по траектории.
Введение
Все большую популярность получают беспилотные летательные аппараты (БПЛА) в виде многовинтовых устройств, а чаще – квадрокоптеров, представляющих из себя платформу с четырьмя роторами, одна пара которых вращается по часовой стрелке, другая – против. По сравнению с БПЛА вертолетного типа с несущим и рулевым винтами квадрокоптеры обладают рядом преимуществ – надежность и простота конструкции, большая стабильность, компактность и маневренность, малая взлетная масса при существенной массе полезной нагрузки. Область применения квадрокоптеров достаточно широка. Например, они могут быть использованы как недорогое и эффективное средство для получения фото- и видеоизображений с воздуха, в том числе при плохих погодных условиях. Так как квадрокоптер – дистанционно управляемый летательный аппарат, он хорошо подходит для наблюдения и контроля объектов, территорий и зон, доступ к которым затруднен (в случае естественных или техногенных катастроф), или в условиях, непригодных для человека, таких как повышенный уровень радиации или сильное загрязнение воздуха [1-3].
Большинство работ, посвященных решению задач мониторинга местности при помощи БПЛА, связано с движением летательного аппарата по известной траектории. В частности, в работе [4] авторами предлагается система управления, реализующая движение квадрокоптера по прямой линии, соединяющей начальную и конечную точки траектории, с заданной скоростью на заданной высоте над поверхностью земли с учетом рельефа местности. В [5] рассмотрен алгоритм передвижения квадрокоптера вдоль любой траектории в пространстве, при котором квадрокоптер способен следовать за движущимся объектом с известными координатами и скоростью.
В настоящей работе предлагается алгоритм полета квадрокоптера по заранее заданной траектории в автономном режиме, реализованный в программном приложении. Актуальность задачи состоит в том, что полет происходит в закрытом помещении с неизвестными объектами [6-8]. В такой постановке задачи, когда автоматическая система не может однозначно идентифицировать препятствие либо происходит сбой в выполнении задания, либо возникает необходимость дополнительного вмешательства человека при формировании и контроле выполнения пролета по заданной траектории БПЛА [9, 10].
Способ задания траектории
Для формирования траектории создана область рисования компьютерной мышью в окне программы, итоговая траектория представляет собой множество точек на декартовой плоскости с координатами (х, у). Полученные данные имеют числовое представление в форме массива точек. Этот массив разбивается на небольшие части – отрезки кривой, аппроксимирующие первоначальную траекторию (рис. 1).
Рис. 1. Окно приложения: траектория, заданная мышью (а); аппроксимированная первоначальная траектория (б)
П.А. Гриценко, А.С. Кремлев, Г.М. Шмигельский
Аналитический расчет траектории
Перемещение квадрокоптера по траектории складывается из движений следующих типов:
– движение по прямой, соединяющей точки начала и конца элемента-отрезка;
– вращение вокруг вертикальной оси, проходящей через центр квадрокоптера.
Длина продольного перемещения вычисляется как расстояние между двумя точками (в пикселях), умноженное на коэффициент соответствия. Коэффициент соответствия рассчитывается в зависимости от размеров площадки для полета и области рисования на дисплее.
Расчет угла поворота происходит в несколько этапов (рис. 2).
1. Угол а определяется следующим выражением:
(
а = агссоБ
Уо – У
– У 2 )2 (*2 – *1 )2
180 л
2. Второй и последующие углы р,- рассчитываются по формуле
Р,. = атссоБ
(х,. – х,.-1) • ( 1 – х,.-1) (у, – у,–1) • (у, 1 – у,-)
.-1 )2 (у, – у,-1 )2) • (( 1 – х,. )2 (у, 1 – у, )2)
где ,= 1, …, N-1; N – количество отрезков.
180 л
Е(х4,у4)
А(хо,уо)
Рис. 2. Расчет угла поворота Для определения направления поворота квадрокоптера используются несколько условий:
– если у1 > у,.-! и
– если у1 < у,-1 и
х,.-1 > х. 1, то поворот направо, иначе – налево;
(х,.- х,-1 Му< 1 – У,.-1)
(у< – у,-1)
(-,-1 М ( 1 У’-1 М х/-1 < х. 1, то поворот направо, иначе – н;
(у,- у,-1)
Используемый инструментарий (программные средства)
Инструментом для создания оконного приложения был выбран язык программирования С , реализованный в среде разработки 4.8, что позволило создать исполняемые файлы для различных операционных систем [11]. Вся программа реализована на следующих стандартных классах в
– QThread – класс, обеспечивающий платформонезависимые потоки;
– QWidget – базовый класс для всех объектов пользовательского интерфейса;
– QUdpSocket – класс, предоставляющий возможность использования ИБР (ИБР – это протокол пользовательских датаграмм (блоков информации));
– QMouseEvent – класс, содержащий параметры событий мыши;
– QGraphicsView – класс, предоставляющий виджет для отображения содержимого QGraphicsScene;
– QGraphicsScene – класс, предоставляющий поверхность для управления большим числом графических двумерных элементов.
х
Программа обеспечивает выполнение следующих функций:
– ручное управление летательным аппаратом при помощи клавиатуры или мыши;
– полет по заданной траектории;
– обмен данными между компьютером и летательным аппаратом по каналу беспроводной связи Wi-Fi;
– возможность отслеживать данные с датчиков летательного аппарата.
Использовано программное обеспечение, распространяемое по свободным лицензиям. Программа может работать под управлением операционных систем Windows XP/Vista/7/8, а также Linux. Рекомендуемые системные требования к компьютеру для запуска и работы программы: 50 МБ свободного места на диске; 512 МБ оперативной памяти; процессор с частотой 1 ГГц.
Выбор исполнительного устройства, апробация программного приложения на реальном объекте
В качестве исполнительного устройства при реализации программы движения по траектории был выбран квадрокоптер Ar Drone (рис. 3). К его преимуществам перед аналогами можно отнести наличие беспроводной связи, простое формирование команд управления, встроенные датчики, такие как гироскоп и акселерометр, штатная автоматическая система стабилизации, взлета и посадки.
Рис. 3. Квадрокоптер Ar Drone
Связь компьютера с квадрокоптером осуществляется посредством Wi-Fi, а управление организовано в виде UDP-датаграмм. Общий вид команд управления Ar Drone задается следующим образом:
AT*PCMD=%d,%d,%d,%d,%d,%d<LF>, где аргумент 1 – порядковый номер команды; аргумент 2 – флаг, разрешающий комбинированные команды; аргументы 3-6 определяют движение влево-вправо, вперед-назад, вверх-вниз и вращение вокруг вертикальной оси соответственно. Все значения находятся в интервале [-1; 1].
При нажатии кнопки «Полет» в главном окне приложения (рис. 1) квадрокоптеру отправляется команда на взлет, после получения которой он автоматически поднимается на заданную высоту. Рассчитанные углы и расстояния между точками формируют управляющее воздействие для Ar Drone, отправляемое в режиме реального времени с использованием данных с датчиков для более точного следования по траектории. Движение осуществляется в горизонтальной плоскости без учета изменения высоты летательного аппарата относительно земли. При достижении конечной точки траектории приложение отправляет квадрокоптеру команду посадки.
В экспериментах квадрокоптер под управлением разработанной программы повторил заданную траекторию с погрешностью не более 5%.
Заключение
Предложен способ управления летательным аппаратом c компьютера по беспроводной связи, который позволяет задавать и отслеживать траекторию полета БПЛА. Сформированная в результате реализации программы траектория предназначена для системы управления квадрокоптером в автоматическом режиме в местах, где невозможно использовать сигнал от спутника (GPS) или сторонних датчиков, но известен подробный план местности или здания. Реализация разработанного алгоритма на квадрокоптере позволяет избежать постоянных обменов сигналами со станцией; как следствие, снижается потребление электроэнергии приемника и повышается время полета, что дает возможность летательному аппарату преодолевать большее расстояние по сравнению с ручным управлением. При проведении экспериментов на квадрокоптере Ar Drone компании Parrot по прохождению заранее заданной траектории в автоматическом режиме летательный аппарат ни разу не потерял связь с наземной станцией, выполняя траекторию с погрешностью не более 5%.
Исследование выполнено при поддержке министерства образования и науки Российской Федерации, соглашение № 14.В37.21.0421 и гос. контракт № 16.740.11.0553.
Т.А. Акунов, Н.А. Дударенко, Н.А. Полинова, А.В. Ушаков
Литература
1. Ситников Д.В., Бурьян Ю.А., Русских Г.С. Автопилот мультикоптера // Известия Тульского государственного университета. Технические науки. – 2023. – № 7. – С. 213-221.
2. Рубин Д.Т., Конев В.Н., Стариковский А.В., Шептунов А.А., Смирнов А. С., Толстая А.М. Разработка квадрокоптеров со специальными свойствами для проведения разведывательных операций // Спецтехника и связь. – 2023. – № 1.- С. 28-30.
3. Эпов М.И., Злыгостев И.Н. Применение беспилотных летательных аппаратов в аэрогеофизической разведке // Интерэкспо Гео-Сибирь. – 2023. – Т. 2. -№ 3.- С. 22-27.
4. Белоконь С.А., Золотухин Ю.Н., Нестеров А.А., М.Н. Филиппов. Управление квадрокоптером на основе организации движения по желаемой траектории в пространстве состояний // Труды XIII Международной конференции «Проблемы управления и моделирования в сложных системах». – Самара: Самарский научный центр РАН, 2023. – С. 217-222.
5. Puls T., Hein A. 3D trajectory control for quadrocopter // Intelligent Robots and System (IROS), IEEE/RSJ International Conference on, 2023. – P. 640-645.
6. Бобцов А.А., Шаветов С.В. Управление по выходу линейным параметрически неопределенным объектом в условиях возмущающих воздействий и неучтенной динамики // Научно-технический вестник СПбГУ ИТМО. – 2023. – № 1 (71). – С. 33-39.
7. Чеботарев С.Г., Кремлев А.С. Анализ линейных систем с переменными параметрами для синтеза интервальных наблюдателей // Научно-технический вестник информационных технологий, механики и оптики. – 2023. – № 6. – С. 50-53.
8. Бобцов А.А., Пыркин А.А. К задаче управления параметрически не определенным линейным объектом с запаздыванием в канале управления // Научно-технический вестник СПбГУ ИТМО. – 2023. -№ 3 (73). – С. 138.
9. Андреев В.Л., Иванов Р.В., Козлов Е.Б., Потупчик С.Г., Соколов П.В. Системы управления малоразмерными дистанционно пилотируемыми самолетами // Изв. вузов. Приборостроение. – 2023. – Т. 54. – № 8. – С. 48-57.
10. Литвинов Ю.В., Бушуев А.Б., Гриценко П.А., Шмигельский Г.М. Полет квадрокоптера по произвольно задаваемой траектории // Материалы IX международной научно-практической конференции «Современные научные достижения-2023». – Технические науки: Прага. Издательский дом «Образование и наука» ООО. – 2023. – Часть 77. – 96 с.
11. Бланшет Ж., Саммерфилд М. QT4 программирование GUI на С . – 2-е изд. – ООО КУДИЦ-Образ, 2008. – 738 с.
Гриценко Полина Андреевна – Санкт-Петербургский национальный исследовательский университет
информационных технологий, механики и оптики, студент, [email protected]
Кремлев Артем Сергеевич – Санкт-Петербургский национальный исследовательский университет
информационных технологий, механики и оптики, кандидат технических наук, доцент, [email protected]
Шмигельский Григорий Михайлович – Санкт-Петербургский национальный исследовательский университет
информационных технологий, механики и оптики, студент, [email protected]
УДК 62.50: 681.50.1
ИССЛЕДОВАНИЕ ПРОЦЕССОВ В НЕПРЕРЫВНЫХ СИСТЕМАХ С КРАТНЫМИ КОМПЛЕКСНО-СОПРЯЖЕННЫМИ СОБСТВЕННЫМИ ЧИСЛАМИ ИХ МАТРИЦ СОСТОЯНИЯ Т.А. Акунов, Н.А. Дударенко, Н.А. Полинова, А.В. Ушаков
Рассматривается устойчивая непрерывная система, матрица состояния которой обладает спектром кратных комплексно-сопряженных собственных чисел, кратность которых равна размерности ее вектора состояния. Особое внимание обращается на ситуацию, когда модуль вещественной части собственного числа меньше единицы. Устанавливается, что в этой ситуации уже при малой колебательности собственных чисел появляется заметный выброс в процессах по норме свободного движения по вектору состояния и величина выброса тем больше, чем меньше по модулю вещественная составляющая собственного числа и чем больше его кратность и мнимая часть. Ключевые слова: комплексно-сопряженные собственные числа, кратность, свободное движение, норма, выброс.
Введение. Постановка задачи
Ставится задача исследования свободного движения устойчивой линейной непрерывной многомерной динамической системы по норме вектора состояния с целью изучения влияния на это поведение кратности собственных чисел ее матрицы состояния и значения их модуля. В работе поставленная задача
Вывод уравнений движения
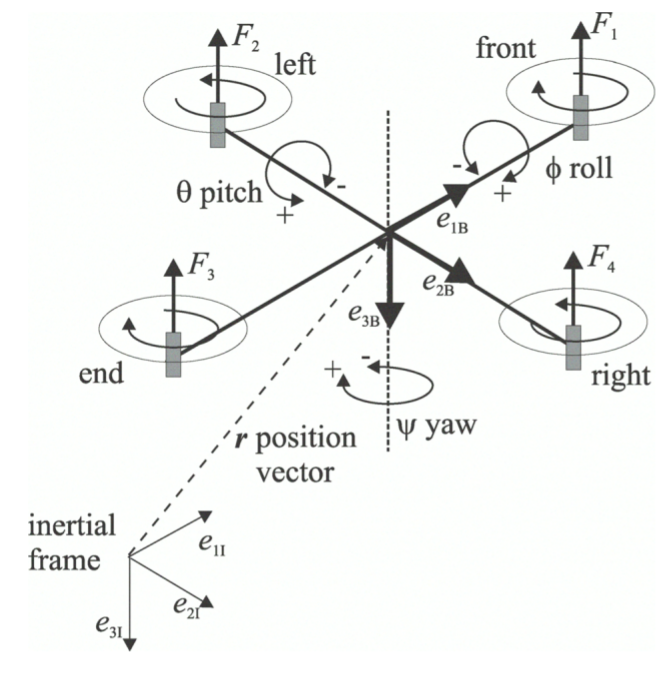
Ориентация квадрокоптера в пространстве задается тремя углами: рысканья —
ψ
, тангажа —
θ
, крена —
φ
Они вместе составляют вектор
Позиция устройства в инерциальной система отсчета задается радиус-вектором
Матрица перехода из системы координат квадрокоптера в инерциальную систему координат имеет следующий вид
Сила тяги, производимая каждым из четырех двигателей равна
Здесь
ωi
− угловая скорость двигателя, а
b
– коэффициент пропорциональности.
Теперь мы можем записать дифференциальное уравнение, описывающее ускорение квадрокоптера по вертикальной оси.
Сразу же запишем второе дифференциальное уравнение

Здесь
I
– матрица инерции,
M
– вращающий момент, приложенный к квадрокоптеру,
MG
– гироскопический момент.
Вектор
M
задается следующим образом:
Здесь
d
— коэффициент лобового сопротивления,
L
– длина плеча.
Гироскопические моменты, вызванные поворотом объекта с вращающимися роторами двигателей записываются так:



Эта система из 9 уравнений как раз и описывает динамику системы.

