

- Что дальше?
- Мотор
- Brushed vs brushless
- Inrunner vs outrunner
- Kv
- Тяга
- Дополнительные соображения
- Несущие винты (Пропеллеры)
- Лопасти и диаметр
- Шаг/угол атаки/эффективность/тяга
- Вращение
- Материалы исполнения
- Складные
- Установка
- Защита несущих винтов
- Балансировка
- ESC
- Подключение
- Bec
- Прошивка
- Распределение питания
- Аккумулятор
- Химия
- Напряжение
- Ёмкость
- Скорость разряда
- Безопасность
- Зарядка
- Монтаж
- Rashvinta
- Балансировка пропеллеров
- Калькулятор ecalc
- Количество и форма лопастей
- Материалы исполнения
- Подключение
- Расчёт коптера-ликбез — wiki о коптерах
- Третий вариант
- Установка
Что дальше?
Если вы хотите еще сильнее углубиться в тему выбора, то вам нужно открыть Ютуб или любой поисковик и вбить запрос «тест тяги двигателя @название двигателя@» и изучить видео, где различные блогеры тестирую двигатель на разном уровне газа используя разные пропеллеры, выискивая идеальные параметры совмещения двигатель/пропеллер. Искать нужно видео о двигатели, который вы присмотрели для своей сборки.
Данные будут примерно такого вида:
| 50% газа на двигателе 2205-2300 KV | Тяга | Обороты | Амперы | Вольты | Ватты | КПД |
| HQProp 5x4x3GF | 468 | 17790 | 7.54 | 16.08 | 121 | 3.9 |
Мотор
От того какие моторы вы будете использовать в своей сборке, будет зависеть, какую максимальную нагрузку сможет поднять дрон, а также сколько времени он сможет находиться в полёте. Силовая установка должна обязательно состоять из моторов одной марки и модели, такой подход обеспечит ей сбалансированную работу.
Brushed vs brushless
В коллекторных (Brushed) моторах ротор с обмоткой вращается внутри статора на котором магниты зафиксированы жёстко. В бесколлекторных (Brushless) моторах всё на оборот; обмотка крепится жёстко к внутренней части статора, а магниты установлены на валу и вращаются. В большинстве случаев вы будете рассматривать только бесколлекторные моторы (БК) постоянного тока. Моторы такого типа широко используются в индустрии радиолюбителей при сборке различных продуктов, начиная от вертолётов и самолётов и заканчивая системами привода в автомобилях и катерах.

Бесколлекторные моторы типа «Pancake» имеют больший диаметр, они более плоские и как правило имеют высокий крутящий момент и более низкое значение KV (детали ниже). В БПЛА небольших размеров (обычно размером с ладонь) чаще всего используют маленькие коллекторные моторы из-за более низкой цены и простого двухпроводного контроллера. Несмотря на то, что бесколлекторные моторы могут быть разных размеров и иметь разные характеристики, выбор меньшего размера совсем не означает, что будет дешевле.
Inrunner vs outrunner
Существует несколько типов бесколлекторных моторов постоянного тока:
- Inrunner – внутренний ротор. Обмотка зафиксирована на статоре, магниты установлены на валу ротора, который вращается (как правило используются на радиоуправляемых лодках, вертолётах и автомобилях из-за высокого KV).
- Outrunner – наружный ротор. Магниты зафиксированы на статоре, который вращается вокруг неподвижной обмотки. Нижняя часть мотора зафиксирована. (как правило, у моторов такого типа больше крутящего момента).
- Hybrid Outrunner – технически это «Outrunner», но реализованный в корпусе «Inrunner». Такой подход позволил объединить в одном типе крутящий момент «Outrunner» и отсутствие внешних вращающихся элементов как у моторов типа «Inrunner».
Kv
Рейтинг KV – макс. число оборотов, которое может развить мотор без потери в мощности при заданном напряжении. Для большинства многороторных БЛА актуально низкое значение KV (например, от 500 до 1000), поскольку это способствует обеспечению стабильности. В то время как для акробатического полёта будет актуальным значение KV между 1000 и 1500, в тандеме с несущими винтами (пропеллерами) меньшего диаметра. Допустим, значение KV для конкретного мотора составляет 650 об/вольт, то при напряжении в 11.1В мотор будет вращаться со скоростью: 11.1 × 650 = 7215 об/мин, а если вы будете использовать мотор при более низком напряжении (скажем, 7.4В), то частота вращения составит: 7.4 × 650 = 4810 об/мин. При этом важно отметить, что использование низкого напряжения, как правило означает, что потребление тока будет выше (Мощность = Ток × Напряжение).
Тяга
Некоторые производители бесколлекторных моторов могут указывать в спецификации информацию о максимально возможной тяге (Thrust) создаваемой мотором в купе с рекомендуемым несущим винтом. Единицей измерения тяги, как правило, являются килограмм (Кг/Kg), фунт (Lbs) или Ньютон (N). Например, если вы строите квадрокоптер и вам известно, значение тяги отдельно взятого мотора = до 0.5кг в купе с 11-дюймовым несущим винтом, то на выходе четыре таких мотора смогут поднять на максимальной тяге: 0.5кг × 4 = 2кг. Соответственно, если общий вес вашего квадрокоптера составляет чуть менее 2кг, то c такой силовой установкой он будет взлетать только на максимальных оборотах (макс. тяге). В данном случае будет актуальным, либо выбрать более мощную связку «мотор несущий винт», которые позволят обеспечить большую тягу, либо уменьшить общую массу беспилотника. При макс. тяге силовой установки = 2кг, вес дрона должен составлять не более половины этого значения (1кг, включая вес самих моторов). Аналогичный расчёт можно сделать для любой конфигурации. Предположим, что вес гексакоптера (включая раму, моторы, электронику, аксессуары и т.д.) составляет — 2.5кг. Значит каждый двигатель для такой сборки должен обеспечивать (2.5кг ÷ 6 моторов) × 2 = 0.83кг тяги (или более). Теперь вы знаете как рассчитать оптимальную тягу моторов исходя из общего веса, но прежде чем принимать решение, предлагаем ознакомиться с разделами ниже.
Дополнительные соображения
- Разъёмы: у коллекторных моторов постоянного тока доступно два разъёма « » и «-». Смена проводов местами меняет направление вращения мотора.
- Разъёмы: бесколлекторные моторы постоянного тока имеют три разъёма. Чтобы узнать как их подключить, а также как изменить направление вращения, обратитесь к разделу «ESC» ниже.
- Обмотки: обмотки влияют на KV моторов. Если вам необходимо наиболее низкое значение KV, но при этом в приоритете крутящий момент, будет лучшим обратить своё внимание на бесколлекторные моторы постоянного тока типа «Pancake».
- Монтаж: у большинства производителей есть общая схема монтажа для БК моторов постоянного тока, которая позволяет компаниям, производящим рамы не прибегать к изготовлению так называемых адаптеров. Шаблон как правило метрический, с двумя отверстиями разнесёнными на 16мм друг от друга, и ещё двумя отверстиями, разнесёнными на 19мм (под углом 90° к первому).
- Резьба: монтажная резьба, используемая для крепления бесколлекторного мотора к раме, может варьироваться. Обычные метрические размеры винтов М1, М2 и М3, имперские размеры могут быть 2-56 и 4-40.
Несущие винты (Пропеллеры)
Несущие винты (пропеллеры, сокр. пропы) для многороторных БЛА берут своё начало от винтов радиоуправляемых самолётов. Многие спросят: почему бы не использовать лопасти вертолёта? Несмотря на то, что это уже было сделано, представьте себе размеры гексакоптера с лопастями от вертолёта. Также стоит отметить, что вертолётная система требует изменения шага лопастей, а это существенно усложняет конструкцию.
Вы также можете спросить, почему бы не использовать турбореактивный двигатель, турбовентиляторный двигатель, турбовинтовой двигатель и т.д? Безусловно они невероятно хороши для обеспечения большой тяги, но при этом требуют большое количество энергии.
Лопасти и диаметр
Несущие винты большинства мультироторных БЛА имеют две, либо три лопасти. Наибольшее применение получили винты с двумя лопастями. Не думайте, что добавление большего количества лопастей автоматически приведёт к увеличению тяги; каждая лопасть работает в потоке, возмущенном предыдущей лопастью, снижая КПД пропеллера. Несущий винт малого диаметра имеет меньшую инерцию и следовательно его легче ускорять и замедлять, что актуально при акробатическом полёте.


Шаг/угол атаки/эффективность/тяга
Тяга, создаваемая несущим винтом, зависит от плотности воздуха, числа оборотов винта, его диаметра, формы и площади лопастей, а также от его шага. Эффективность винта связана с углом атаки, который определяется как шаг лопасти минус угол спирали (угол между результирующей относительной скоростью и направлением вращения лопасти). Сама эффективность — это отношение выходной мощности к входной. Большинство хорошо спроектированных винтов имеют КПД более 80%. На угол атаки влияет относительная скорость, поэтому пропеллер будет иметь разную эффективность при разных скоростях мотора. На эффективность также сильно влияет передний край лопасти несущего винта, и очень важно, чтобы он был максимально гладким. Несмотря на то, что конструкция с переменным шагом была бы наилучшей, дополнительная сложность, необходимая по сравнению с присущей многороторной простотой, означает, что пропеллер с переменным шагом почти никогда не используется.


Вращение
Несущие винты рассчитаны на вращение по часовой стрелке (CW), либо против часовой стрелки (CCW). На направление вращения указывает наклон лопасти (смотреть на пропеллер с торца). Если правая кромка лопасти выше — CCW, если левая кромка — CW. Если конструкция вашего беспилотника подразумевает перевёрнутое расположение моторов (как в случае с конфигурациями Vtail, Y6, X8) обязательно измените направление вращения несущих винтов, чтобы тяга была направлена вниз. Лицевая сторона несущего винта всегда должна быть обращена к небу. Документация которая идёт с контроллером полёта как правило содержит информацию о направлении вращения каждого винта, для каждой поддерживаемой контроллером многомоторной конфигурации.

Материалы исполнения
Материал(ы), используемые для изготовления несущих винтов (пропеллеров), могут оказывать умеренное влияние на лётные характеристики, но безопасность должна быть главным приоритетом, особенно, если вы новичок и не опытны.
- Пластмасса (ABS/Нейлон и т.д.) — является самым популярным выбором, когда речь заходит о многомоторных БЛА. Во многом это связано с низкой стоимостью, достойными лётными характеристиками и показательной долговечностью. Как правило в случае краша, по крайней мере, один пропеллер оказывается сломанным, и пока вы осваиваете дрон и учитесь летать, у вас всегда будет много сломанных пропов. Жёсткость и ударопрочность пластикового винта может быть улучшена посредством усиления углеродным волокном (карбон), такой подход макс. результативен и не так дорог по сравнению с винтом полноценно исполненным и карбона.

- Фиброармированный полимер (углеродное волокно, нейлон усиленный карбоном и т.д.) — является «передовой» технологией во многих отношениях. Детали из углеродного волокна всё ещё не очень просты в изготовлении, и поэтому вы платите за них больше, чем за обычный пластиковый винт с аналогичными параметрами. Пропеллер изготовленный из углеродного волокна сложнее сломать или согнуть, и, следовательно, при краше, он нанесёт больший ущерб всему, с чем соприкоснётся. Одновременно с этим, карбоновые винты, как правило, хорошо сделаны, более жёсткие (обеспечивают минимальные потери в эффективности), редко требуют балансировки и имеют более лёгкий вес по сравнению с любыми другими материалами исполнения. Такие винты рекомендуется рассматривать только после того, как уровень пилотирования пользователя станет комфортным.

- Дерево — редко используемый материал для производства несущих винтов многороторных БЛА, поскольку для их изготовления требуется механическая обработка, которая в последствии делает деревянные пропеллеры дороже пластиковых. При этом дерево вполне прочное и никогда не гнётся. Отметим, что деревянные пропеллеры всё ещё применяют на радиоуправляемых самолётах.

Складные
Складные пропы имеют центральную часть, которая соединяется с двумя поворотными лопастями. Когда центр (который соединен с выходным валом мотора) вращается, центробежные силы действуют на лопасти, выталкивая их наружу и по существу делая пропеллер «жёстким», с тем же эффектом, что и классический не складываемый винт. Из-за низкого спроса и большого количества требуемых деталей, складные пропеллеры встречаются реже. Основное преимущество складных пропов это компактность, а в сочетании со складной рамой, транспортировочные размеры дрона могут быть значительно меньше полётных. Сопутствующим преимуществом складного механизма является отсутствие необходимости, при краше, менять винт целиком, достаточно будет заменить только повреждённую лопасть.

Установка
Как и БЛА, несущие винты могут имеют широкий диапазон размеров. Таким образом, в этой отрасли существует целый ряд «стандартных» диаметров вала двигателя. В связи с чем несущие винты часто поставляются с небольшим набором переходных колец (выглядят как шайбы с отверстиями разного диаметра в центре), которые устанавливают в центральное посадочное отверстие пропа, в случае если диаметр отверстия несущего винта оказался больше диаметра вала используемого мотора. Так как не все разработчики комплектуют пропы набором таких переходных колец, рекомендуется заблаговременно сверять диаметр отверстия приобретаемых пропов с диаметров вала вашего мотора.
Фиксироваться винт на моторе может исходя из того, какой из способов крепления поддерживает ваш мотор. Если вал мотора не подразумевает никаких вариантов крепежа (резьб. соединение, различные приспособления для крепления и т.д.), в таком случае применяются специальные адаптеры, такие как пропсейверы и цанговые зажимы.
Бесколлекторные моторы с наружным ротором (типа «Outrunner») как правило, в верхней его части, имеют несколько резьбовых отверстий рассчитанных под установку различных адаптеров и креплений. Не менее популярным вариантом крепления пропеллера на валу БК мотора является самозатягивающая гайка. Вал такого мотора на конце имеет резьбу, направление которой противоположно направлению вращения ротора. Такой подход исключает самопроизвольное откручивание фиксирующей гайки, обеспечивая безопасную и надежную эксплуатацию дрона.
Защита несущих винтов
Защита несущих винтов – призвана исключить прямой контакт силовой установки БЛА с встречным объектом, сохранив тем самым её целостность и работоспособность, а также не допустить получение травм о быстро вращающиеся пропеллеры в результате столкновения с людьми и животными. Защита пропеллеров крепится к основной раме. В зависимости от варианта исполнения может как частично перекрывать рабочую зону силовой установки, так и полностью (кольцевая защита). Защита винтов чаще всего применяется на небольших (игрушечных) БЛА. Применение в сборке элементов защиты несёт и ряд компромиссов, среди которых:
- Может вызывать избыточную вибрацию.
- Как правило выдерживает не сильные удары.
- Может понизить тягу, если под пропеллером размещено слишком много крепёжных опор.

Балансировка
Неудовлетворительная балансировка имеет место быть у большинства недорогих пропеллеров. Чтобы в этом убедиться, далеко ходить не надо, достаточно вставить в центральное посадочное отверстие винта карандаш (как правило при дисбалансе одна сторона будет тяжелее другой). В связи с чем настоятельно рекомендуется проводить балансировку своих пропов, перед тем как устанавливать их на моторы. Несбалансированный пропеллер будет вызывать избыточные вибрации, которые в свою очередь отрицательно влияют на работу полётного контролера (проявляется в некорректном поведении дрона в полёте), не говоря уже об увеличении шумности, повышенном износе элементов силовой установки и ухудшении качества съёмки подвешенной камеры.

Пропеллер может быть уравновешен разными способами, но если вы строите беспилотник с нуля, то в арсенале инструментов обязательно должен быть недорогой балансир пропеллеров, позволяющий легко и просто определять дисбаланс веса в винте. Для выравнивания веса, вы можете либо отшлифовать наиболее тяжёлую часть пропа (равномерно шлифуется центральная часть лопасти, и не в коем случае не отрезайте часть пропеллера), также можно балансировать путём наклеивания отрезка скотча (тонкий) на более лёгкую лопасть (добавляете отрезки равномерно до тех пор пока не будет достигнут баланс). Обратите внимание, что чем дальше от центра вы делаете балансировочную модернизацию (шлифование или добавление ленты) пропеллера, тем больше будет эффект, основанный на принципе крутящего момента.
ESC
ESC (англ. Electronic Speed Controller; рус. электронный контроллер скорости) — позволяет полётному контроллеру управлять скоростью и направлением вращения мотора. При правильном напряжении, ESC должен выдерживать макс. ток, который может потреблять мотор, а также ограничивать ток проходящий через фазу при коммутации. Большинство ESC, применяемых в беспилотном хобби, позволяют мотору вращаться только в одном направлении, однако с правильной прошивкой они могут работать в обоих направлениях.

Подключение
Изначально ESC может сбивать с толку, потому что для его подключения доступно несколько проводов/контактов/коннекторов, доступных с двух сторон (ESC может приходить как с уже припаянными коннекторами, так и без).
- Подача питания: два толстых провода (обычно чёрный и красный) предназначены для подачи питания от распределительной платы/жгута проводов к которым питание приходит непосредственно от основной аккумуляторной батареи дрона.
- 3 коннектора: С противоположной стороны контроллера доступны три коннектора предназначенные для соединения с тремя пулевидными коннекторами (как правило идут в комплекте с моторами) на бесколлекторном моторе. Применение коннекторов при подключении ESC позволяет при необходимости (в случае сбоя) осуществить быструю смену контроллера без использования паяльника. Бывает, что пулевидные коннекторы идущие с мотором не соответствуют коннекторам на регуляторе, в таком случае просто замените на подходящие. Какой из трёх «плюс», а какой «минус»? Ориентир простой, приходящий плюсовой провод от батареи, переходит в плюсовой на ESC, аналогично и с минусом.
- 3-контактный R/C servo разъём с тонкими проводами: посредством которых осуществляется обработка сигнала поступающего от приёмника, из которых один провод является сигнальным (передача сигнала газа к ESC или вход), второй «минус» (или земля), и плюсовой провод (не задействуется, если отсутствует встроенный BEC; при встроенном BEC является выходом 5В питания, который в последствии можно использовать для питания бортовой электроники).
Bec
Во времена зарождения авиамоделизма в качестве силовой установки использовался двигатель внутреннего сгорания, а питание бортовой электроники осуществлялось от небольшой батареи. С приходом электрической тяги и регуляторов (ESC), в последние, стали включать так называемую цепь устранения батареи — BEC (на англ. Battery Eliminator Circuit; или преобразователь бортового питания; как правило, обеспечивает дополнительный источник тока напряжением 5В при силе тока 1А, либо выше). Иными словами это преобразователь напряжения используемой в сборке LiPo в напряжение для питания бортовой электроники беспилотника.
При сборке мультиротора необходимо подключить все ESC к контроллеру полёта, но потребуется только один BEC, иначе могут возникнуть проблемы при подаче питания на одни и те же линии. Поскольку обычно нет способа отключить BEC на ESC, лучше всего удалить красный провод ( ) и обмотать его изолентой для всех ESC, кроме одного. Также важно оставить чёрный провод (земля) для общего заземления.
Прошивка
Не все существующие на рынке ESC одинаково хороши для применения в мультироторных сборках. Важно понимать, что до появления многомоторных БЛА, бесколлекторные моторы использовались в первую очередь в качестве силовой установки радиоуправляемых автомобилей, самолётов и вертолётов. Большинство из них не требуют быстрого времени отклика или обновления. ESC с встроенным программным обеспечением SimonK или BLHeli способны очень быстро реагировать на входящие изменения, что в целом предопределяет разницу между стабильным полётом или крашем.
Распределение питания
Поскольку каждый ESC питается от основной батареи, основной разъем АКБ должен быть как-то разделен на четыре ESC. Для этого используется плата распределения питания или жгут распределения питания. Эта плата (или кабель) разделяет положительные и отрицательные клеммы основного аккумулятора на четыре. Важно отметить, что типы разъёмов, используемых на аккумуляторе, ESC и распределительной плате, могут не совпадать, поэтому лучше по возможности выбирать «стандартный» разъём (например, Deans), который используется повсеместно. Многие недорогие платы могут требовать пайки, в данном случае пользователь решает сам какой конкретный разъём ему использовать в сборке. Самый простой распределитель питания может включать в себя два входных клеммных блока, либо пайку всех положительных соединений вместе, а затем всех отрицательных соединений вместе …
Аккумулятор
Химия
Батареи, используемые в беспилотных летательных аппаратах, в настоящее время исключительно литий-полимерный (LiPo), причем состав некоторых из них бывает достаточно экзотичным — литий-марганцевые или другие варианты лития. Свинцовая кислота просто не подходит, а NiMh/NiCd все еще слишком тяжелы для своей ёмкости и часто не могут обеспечить требуемые высокие скорости разряда. LiPo предлагает высокую производительность и скорость разряда при небольшом весе. Недостатками являются их сравнительно высокая стоимость и постоянные проблемы с безопасностью (пожароопасны).
Напряжение
На практике вам потребуется только один аккумулятор для вашего БПЛА. Напряжение этой батареи должно соответствовать выбранным вами БК моторам. Почти все АКБ, используемые в наши дни, основаны на литии и содержат несколько элементов (банок) по 3.7В каждая, где 3.7В = 1S (т.е однобаночная АКБ; 2S – двух баночная и т.д.). Поэтому батарея с маркировкой 4S, вероятно, будет иметь номинальное значение: 4 × 3.7В = 14.8В. Также количество банок поможет вам определить, какое зарядное устройство необходимо использовать. Отметим, что однобаночная батарея большой ёмкости физически может выглядеть как многобаночная батарея низкой ёмкости.
Ёмкость
Ёмкость аккумуляторной батареи измеряется в ампер-часах (Ач). Аккумуляторы небольших размеров могут иметь ёмкость от 0.1Ач (100 мАч), ёмкость АКБ для беспилотных летательных аппаратов среднего размера может варьироваться от 2-3Ач (2000 мАч — 3000 мАч). Чем выше ёмкость, тем дольше время полёта, и соответственно тяжелей АКБ. Время полёта обычного БПЛА может находится в интервале 10-20 минут, что может показаться недолгим, но вы должны понимать, что беспилотник в процессе полёта постоянно борется с гравитацией, и в отличие от самолёта, он не имеет поверхностей (крыльев) обеспечивающих помощь в виде оптимальной подъёмной силы.
Скорость разряда
Скорость разряда от литиевой батареи измеряется в «C», где 1C — ёмкость батареи (обычно в ампер-часах, если вы не рассматриваете дрон размером с ладонь). Скорость разряда большинства LiPo батарей составляет не менее 5C (в пять раз больше ёмкости), но, так как большинство моторов, используемых в мультироторных БЛА, потребляют большой ток, батарея должна иметь возможность разряжаться при невероятно высоком значении тока, который, как правило, составляет порядка 30А или более.
Безопасность
LiPo АКБ не совсем безопасны, так как они содержат газообразный водород под давлением и имеют тенденцию гореть и/или взрываться, когда что-то не так. Таким образом, если у вас есть какие-либо сомнения относительно работоспособности аккумулятора, не в коем случае, не подключайте его к беспилотнику или даже к зарядному устройству — считайте его «списанным» и утилизируйте его надлежащим образом. Контрольные признаки того, что с аккумулятором что-то не так это вмятины или вздутие (т.е. утечка газа). При зарядке LiPo батареи лучше всего использовать безопасные LiPo ящики (Battery safe box). Хранение батареи также лучше осуществляться в этих ящиках. В случае краша, первое, что вам нужно сделать, это отключить и проверить аккумулятор. Батарея исполненная в боксе может увеличить вес, но при этом реально поможет защитить АКБ при краше. Некоторые производители продают аккумуляторы с жестким чехлом и без него.

Зарядка
Большинство LiPo аккумуляторов имеют два разъема: один предназначен для использования в качестве основных «разрядных» проводов, способных выдерживать большой ток, а другой, обычно меньшего размера и короче, является разъёмом для зарядки (как правило белый JST разъём), в котором один контакт соответствует заземлению, а остальные, количеству банок АКБ. Его вы подключаете к зарядному устройству, посредством которого осуществляется зарядка (и балансировка) каждой банки батареи. Зарядное устройство обязательно должно сообщать, когда зарядка завершена, и, учитывать проблемы безопасности связанные с литий-полимерными батареями. После окончания процесса зарядки, лучше всего сразу отсоединять аккумулятор от зарядного устройства.

Монтаж
Аккумуляторная батарея является самым тяжелым элементом беспилотника, поэтому её следует устанавливать в центральной мёртвой точке, чтобы обеспечить одинаковую нагрузку на моторы. Аккумуляторная батарея не подразумевает какого-либо специального монтажа (особенно саморезы, которые могут повредить LiPo и вызвать возгорание), поэтому некоторые используемые сегодня методы монтажа включают в себя ремни на липучке, резиновые, пластиковые отсеки и другие. Самым распространённым вариантом монтажа АКБ является подвешивание батареи под рамой с помощью ремня с липучкой.
Rashvinta
RashVinta– программа расчета диаметра воздушного винта для квадрокоптера.
Программа RashVinta позволяет производить вычисления по следующим исходным данным:
- Мощность двигателя и диаметр винта;
- Мощность двигателя и частота вращения винта;
- Диаметр винта и его шаг.
В первом варианте отметка ставится только в поле «Расчет по диаметру винта». Задается размер пропеллера (в сантиметрах), мощность двигателя (в лошадиных силах), максимальная и средняя скорость летательного аппарата. Нажимается кнопка «Расчет». Результатом вычислений будут шаг и частота вращения винта.
Во втором варианте убираются все галочки. В соответствующие окна вводим мощность двигателя, частоту вращения винта, максимальную и среднюю скорость летательного аппарата. Нажимаем кнопку «Расчет». Результатом вычислений будут диаметр винта и его шаг.
Третий вариант расчетов предназначен для профессионалов. Метка ставится в поле «Указать параметры винта». В соответствующие окна записываются диаметр и шаг винта. Нажимается кнопка «Расчет». Результатом является профиль лопасти воздушного винта, который можно изучить в окне просмотра, меняя его масштаб и удаление от ступицы. В виде таблиц результат сохраняется в файле Date.html, присутствующем в каталоге программы.
Кроме того, программа может показать, как выглядит профиль лопасти под реальным углом наклона (галочка в поле «Профиль с углом»), а также продемонстрировать точки, по которым производился расчет (метка в поле «Показывать расчетные точки»).
Полученный профиль можно распечатать в масштабе 1:1.
Балансировка пропеллеров
Можно с уверенностью сказать, что большинство пропеллеров, особенно дешевых, нельзя назвать сбалансированными на 100%. Такие винты не только раздражающе сильно шумят, но и вносят дополнительную вибрацию в работу ВМГ. Из-за этого, в частности, снижается качество воздушных съемок (эффект желе).
Как видим, без процедуры балансировки винтов для квадрокоптера нам не обойтись. Для этого понадобятся:
- Винт;
- Скотч или суперклей (можно заменить лаком для ногтей);
- Наждачная бумага;
- Специальный балансир пропеллеров Du-Bro Tru-Spin – один из лучших, или китайские аналоги.
Прежде всего, нужно выставить само приспособление для балансировки так, чтобы его ось была строго горизонтальной.
Лопасть проверяется на отсутствие повреждений, устанавливается на ось и слегка отклоняется в ту или иную сторону. Если он не возвращается в горизонтальное положение, нужно облегчить (подчистить наждачной бумагой) более тяжелое лезвие или наклеить кусочек липкой ленты на более легкое.
Ось балансировочного станка переворачивается – нужно убедиться, что пропеллер сохраняет равновесие и в этом положении. Отметим, что все подчистки и наклеивания должны выполняться на внутренних (вогнутых) поверхностях лопастей.
Следующим шагом будет балансировка ступицы. Для этого пропеллер устанавливается вертикально. Если он отклоняется вправо, нужно утяжелять клеем или лаком левую часть ступицы и наоборот. Добиваемся баланса, переворачиваем пропеллер и убеждаемся, что в этом положении он также уравновешен. Процедура закончена.
Калькулятор ecalc
Многим создателям беспилотных моделей известен on-line калькулятор eCalc, предназначенный для расчёта параметров винтомоторной установки летательных аппаратов. Страница калькулятора, посвященная мультикоптерам, выглядит приблизительно так.
На первый взгляд, все понятно, но есть несколько нюансов, которые могут повлиять на результаты вычислений.
Прежде всего, вводится полный взлетный вес мультикоптера (с подвесом и камерой, если таковые имеются). Если будет указано Without Drive (Без привода), то вводим суммарный вес рамы, пропеллеров, платы контроллера, подвеса, камеры и оборудования для FPV полетов. Добавим процентов 10 на массу проводов и получаем искомую цифру.
Вводим количество роторов, их схему (одиночная или соосная), максимальную высоту полета и погодные условия, при которых он будет проводиться (температуру за бортом и атмосферное давление).
Из выпадающего списка выбирается нужный аккумулятор. Если необходимая батарея отсутствует, можно выбрать ближайшую по емкости и токоотдаче. Программа заполнит остальные поля самостоятельно. Задается структура и вес аккумулятора.
Далее из выпадающего списка выбираются тип ESC или максимальный ток этих регуляторов.
Выбирается фирма-производитель двигателей. Появляется окно с его оценкой. По уровню KV подбирается конкретный образец.
Переходим к пропеллерам. Выбирается тип пропеллера, его диаметр и шаг. Рекомендуется использовать диаметр воздушного винта, максимально возможный для данной рамы. Если привод имеет зубчатую трансмиссию, то вводится ее передаточное число (отношение числа зубьев ведомой шестерни к числу зубьев ведущей шестерни).
Если нужные компоненты в выпадающих списках отсутствуют, можно перейти в строку Custom и ввести все необходимые данные в соответствующих полях калькулятора. Отметим, что параметры батареи задаются для одной ячейки.
Все поля заполнены, можно выполнять вычисления. Результат расчетов будет представлен в виде циферблатов, списков и графиков.
Количество и форма лопастей
Классическим вариантом является наличие у пропеллера двух лопастей. Впрочем, на самых маленьких моделях применяют воздушные винты с тремя, четырьмя и даже пяти лопастями. Понятно, что многолопастный воздушный винт снижает уровень турбулентности за счет создания более равномерного потока.
Более того, дополнительные лопасти увеличивают общую площадь винта, что благотворно отражается на подъемной силе квадрокоптера. Из этого следует, что многолопастный винт меньшего диаметра способен создавать ту же подъемную силу, что и более крупный классический пропеллер.
Многолопастные пропеллеры делают летательный аппарат более отзывчивым, что очень важно при полетах в режиме Acro. Основным недостатком таких винтов является сложность изготовления и центровки, а также достаточно высокая стоимость.
Советуем обратить внимание на разницу в форме окончания реквизитов. Они бывают трех видов – Normal, Bullnose (BN), Hybrid Bullnose (HBN). Винты Normal имеют заостренные на концах лезвия, создают меньшую тягу, но способствует эффективному расходу энергии аккумулятора.
Винты BN при равном диаметре имеют большую площадь и тягу. Дополнительный вес на кончиках лопастей увеличивает крутящий момент и улучшает чувствительность летательного аппарата по оси рысканья. К сожалению, эти положительные моменты сопровождаются высоким энергопотреблением и снижением времени полета. Пропеллеры HBN занимают промежуточную позицию.
Материалы исполнения
Материал(ы), используемые для изготовления несущих винтов (пропеллеров), могут оказывать умеренное влияние на лётные характеристики, но безопасность должна быть главным приоритетом, особенно, если вы новичок и не опытны.
- Пластмасса (ABS/Нейлон и т.д.) — является самым популярным выбором, когда речь заходит о многомоторных БЛА. Во многом это связано с низкой стоимостью, достойными лётными характеристиками и показательной долговечностью. Как правило в случае краша, по крайней мере, один пропеллер оказывается сломанным, и пока вы осваиваете дрон и учитесь летать, у вас всегда будет много сломанных пропов. Жёсткость и ударопрочность пластикового винта может быть улучшена посредством усиления углеродным волокном (карбон), такой подход макс. результативен и не так дорог по сравнению с винтом полноценно исполненным и карбона.
- Фиброармированный полимер (углеродное волокно, нейлон усиленный карбоном и т.д.) — является «передовой» технологией во многих отношениях. Детали из углеродного волокна всё ещё не очень просты в изготовлении, и поэтому вы платите за них больше, чем за обычный пластиковый винт с аналогичными параметрами. Пропеллер изготовленный из углеродного волокна сложнее сломать или согнуть, и, следовательно, при краше, он нанесёт больший ущерб всему, с чем соприкоснётся. Одновременно с этим, карбоновые винты, как правило, хорошо сделаны, более жёсткие (обеспечивают минимальные потери в эффективности), редко требуют балансировки и имеют более лёгкий вес по сравнению с любыми другими материалами исполнения. Такие винты рекомендуется рассматривать только после того, как уровень пилотирования пользователя станет комфортным.
- Дерево — редко используемый материал для производства несущих винтов многороторных БЛА, поскольку для их изготовления требуется механическая обработка, которая в последствии делает деревянные пропеллеры дороже пластиковых. При этом дерево вполне прочное и никогда не гнётся. Отметим, что деревянные пропеллеры всё ещё применяют на радиоуправляемых самолётах.
Подключение
Изначально ESC может сбивать с толку, потому что для его подключения доступно несколько проводов/контактов/коннекторов, доступных с двух сторон (ESC может приходить как с уже припаянными коннекторами, так и без).
- Подача питания: два толстых провода (обычно чёрный и красный) предназначены для подачи питания от распределительной платы/жгута проводов к которым питание приходит непосредственно от основной аккумуляторной батареи дрона.
- 3 коннектора: С противоположной стороны контроллера доступны три коннектора предназначенные для соединения с тремя пулевидными коннекторами (как правило идут в комплекте с моторами) на бесколлекторном моторе. Применение коннекторов при подключении ESC позволяет при необходимости (в случае сбоя) осуществить быструю смену контроллера без использования паяльника. Бывает, что пулевидные коннекторы идущие с мотором не соответствуют коннекторам на регуляторе, в таком случае просто замените на подходящие. Какой из трёх «плюс», а какой «минус»? Ориентир простой, приходящий плюсовой провод от батареи, переходит в плюсовой на ESC, аналогично и с минусом.
- 3-контактный R/C servo разъём с тонкими проводами: посредством которых осуществляется обработка сигнала поступающего от приёмника, из которых один провод является сигнальным (передача сигнала газа к ESC или вход), второй «минус» (или земля), и плюсовой провод (не задействуется, если отсутствует встроенный BEC; при встроенном BEC является выходом 5В питания, который в последствии можно использовать для питания бортовой электроники).
Расчёт коптера-ликбез — wiki о коптерах
методика расчёта предложена Книжниковым ВВ
полётная масса
Эмпирика прикидки максимальной массы мультироторных коптеров от габаритов платформы или длины диагонали между моторами при условии максимально вписанных винтов—– масса в кг равна десять умножить на диагональ в метрах в квадрате—–м=10d2—-
например при диагонали 32 см или 0.32 метра получаем 10 х (0.32)х0.32=10х0.1=1 кг типично для 8 дюймовых вмг. При диагонали в 1 метр получим 10 кг приемлимой максимальной полетной массы!
можно решить и обратную задачу——заказчик просит спроектировать мультиротарную платформу на 10 кг полезной нагрузки——значит масса полётная будет 4х10 кг =40кг , тогда сразу прикидываем что размер диагонали равен корень квадратный из 40/10 или корень из 4 и получаем 2 метров!
Академический метод расчета мощности электро вмг по тяге в режиме висения в полгаза —-
1) желаемая тяга в ньютонах делить на ометаемую площадь винта в метрах квадратных—нагрузка в паскалях!
например хочу получить 500 г силы = 5 н тяги на стопе с винта диаметром 10 дюйм или 5 дм2 =0.05 м2—–получаем нагрузку 5н/ 0.05м2=100 н/м2!
2) корень квадратный из соотношения нагрузки к плотности среды—это скорость потока метры в секунду в плоскости винта!
корень квадратный из соотношения 100 н/м2 /1.23 кг/м3=( 81)0.5=9 м/с!!!
3) потребляемая электро мощность на среднем газу в ваттах с учётом кпд вмг —-это произведение тяги на скорость делённое на кпд электро-вмг!
потребляемая моща равна 5 н х 9 м/с / 0.66=67.5 ватт—–это эквивалентно мотору массой 65-70 грамм в полгаза!
4) для режима статики удобно применять эмпирическое выражение зависимости геометрии двухлопастного винта и размеров статора многополюсного бк электромотора как произведение диаметра на шаг пропеллера в см эквивалентна произведению диаметра на длину статора в мм D(см)хH(см)=d(мм)хl(мм)—- например 25,2см х12,6см=318=22мм х14.4мм
эффективность по тяге при висении
эмпирическая зависимость для модельных размеров пропеллеров мультироторов в полгаза, диаметр винта в дюймах приблизительно равен оптимальной удельной тяге электро-вмг например
3дюйм=3 грамм на ватт----4д=4г/вт----5д=5г/ вт----6д=6 г/вт и так далее вплоть до 15дюйм!
Обычно наибольшую эффективность по удельной тяге показывают двухлопастные пропеллеры—-но при ограничении габарита по диаметру из-за конструктива используют трёх и четырех лопастные для повышения тяговооруженности при том же моторе и акку!
Также многолопастные винты лучше работают в турболизированом потоке от ветра в приземленном слое—по причине
меньшей паразитной пульсации давления при проходе лопастями секторов ометания в косом потоке и пересечении луча!
Как результат —–меньше трясёт весь аппарат, корректней работает АП и видеокартинка не дерганая!
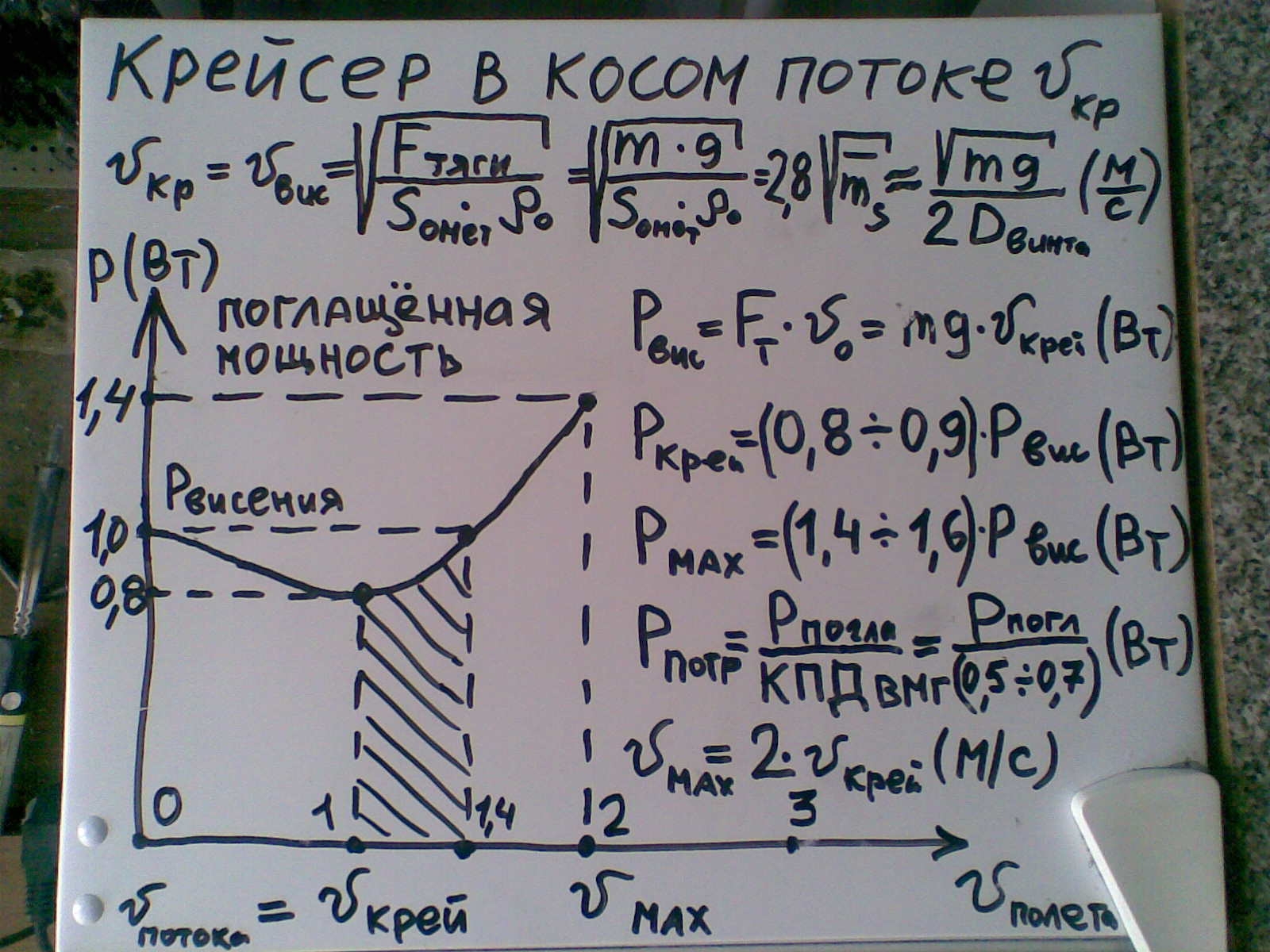
косой поток
Коптер при движении в горизонте относительно воздуха летит благодаря наклону оси винта от вертикали в направлении полёта —этот режим вызывает косой обдув на плоскость вращения винта——явление очень сложное с точки зрения мгновенного аэродинамического обтекания каждого фрагмента лопасти в зависимости от сектора расположения лопасти!
В классическом одновинтовом вертолёте для адаптации к косому обдуву придумали автомат перекоса угла установки лопастей в зависимости от сектора—-при этом лопасть начинает работать как крыло и частично разгружает мотор по потребляемой мощности в полтора раза правда только в узком диапазоне горизонтальной скорости —-называется крейсер ! В мультироторах винту с фиксированным шагом удаётся адаптироваться благодаря упругому динамическому кручению лопасти из эластичного материала типа термопластика плюс-минус пару градусов—-разгрузка мотора на крейсере около 1.1-1.2 раза относительно режима висения!
минимальная скорость крейсера тождественна скорости потока через винт в режиме висения для квадрокоптера
Vвис=Vкр=(1.1mg )0.5/2D, диапозон крейсерских скоростей коптера любого типа Vкр=(1-1.4)Vвис!!!
Например квадрик полётной массой 800грамм с винтами диаметром 10 дюйм или 0.25 м-----то корень квадратный из 1.1веса в 8.8 ньютон делить на 2х0.25 м ----получаем 2.96/0.5=6 метров в секунду! Тогда поглащённая мощность висения или потока в штиль равна вес 8 н х 6 мвс=48 вт-----потребляемая моща 48 вт делить на кпд вмг 66% или 0.66 равна 72 вт ! В горизонтальном полёте на крейсере около 6 м/с мощность упадет до 0.9 мощности висения или 65 вт, так как
винт в косом потоке начинает работать как крыло в набегающем потоке! А вот при максимальной скорости полёта в два раза выше, чем скорость потока при весении потребляемая мощность вмг вырастет также в 2 раза!
Угол наклона коптера при висении в ветер, то есть неподвижно земле, как раз указывает истинную скорость ветра!
Тогда скорость можно принять как половину от угла наклона или например 0.5 х10 град=5 метров в секунду для большинства мультиротарных коптеров! На практике если наклон при висении более 20 град например на высоте 100 метров и выше, то ветер уже критичный для невозврата против ветра——выход жаться к земле, где ветер слабее 1.5 раза и огородами ползти домой!
Максимальная воздушная горизонтальная скорость коптера эмпирически это произведение шага на частоту—– Vпол=Hf !
Парадокс работы винта в косом потоке для мультироторных платформ заключается в следующем —–максимальная воздушная скорость ла определяется скоростью потока, как произведение геометрического шага винта на частоту вращения и равна именно скорости потока в плоскости винта несмотря на то что ось или вектор тяги не параллелен движению самого коптера по сравнению с самолетом,а развернут под большим углом к горизонтали и почти вертикальный 60-80градусов—-получается что
струя воздуха относительно коптера выворачивается из прямой классической воронки при висении в змееобразную загогулину похожую на раструб саксафона засасывающего набегающий поток с трансформацией скоростей в горизонтальную составляющую!
“10 заповедей” авиаконструктора квадрокоптера(дрон)
1) масса полётная это четыре массы полезного груза mпол=4mгруз, где mрамы авионика =mвмг=mакку=mгруз
2) диагональ между моторами в сантиметрах это корень квадратный из полётной массы дрона в граммах L=(m)0.5
3) удельная тяга винта (грамм/ватт) в режиме висения на полгаза равна диаметру пропеллера в дюймах D(дюйм)=m/Рпот
4) скорость крейсера в горизонтальном полёте равна скорости потока через винт при весении Vкр=Vвис(м/с)=5(m(г))0.5/D(см)
5) мощность потребления вмг при весении равна произведению массы на скорость потока и делить на эффективность вмг с бк моторами Pст=UаккуIст=0.01m(г)Vвис/КПДвмг———где КПДвмг =40% у крошечных квадриков диагональю до 12см,КПДвмг =50% у мелких квадриков диагональю до 25см, КПД=60% у средних коптеров с диагональю до 50см, КПД=70% у больших до 100см, КПД=80% у крупных квадрокоптеров с диагональю свыше 2м
6) напряжение аккумулятора эмпирически корень квадратный из одной десятой полётной массы в граммах Uакку(в)=(0.1m)0.5
7) перегрузка на ла или относительный запас тяги это максимальная тяговооруженность —- Fст(г)/m(г)=Kт=2-4единицы
8) относительный запас скорости полёта это корень степени 0.66 из тяговооруженности Kск=(Тст)2/3——тогда Vмах=VвисKск
9) коэф.полезного действия электро-вмг в горизонтальном полёте на полном газу 50% —–Pпотреб=0.02m(г)Vмах=UаккуIпол
10) произведение диаметра и шага двухлопастного винта в см равно произведению диаметра и длины статора бк в мм DH(см2)=dl(мм2)
более подробно смотри статью “долголёт”

Третий вариант
- Установи галочку в «указать параметры винта»
- Введи диаметр винта и шаг винта
- После нажатия на кнопку расчёт, программа рассчитает профили сечения винта (форма лопастей) на различных радиусах от центра. Результат ты получишь в окне просмотра, и в виде таблицы Date.html в каталоге программы.
- Кнопками со стрелками просматриваешь сечения на различных радиусах, а ползунком меняешь масштаб.
Как ты можешь заметить, подбор и корректировка пропеллеров, это важное и не самое простое занятие. Однако, настоятельно рекомендую уделить этому время. Даже в такой, на первый взгляд, неуклюжей корове, как квадрокоптер, есть место аэродинамике. К тому же это может сэкономить тебе очень много денег на моторах.
Конечно, всё вышесказанное достаточно ситуативно. К примеру, если ты собираешь маленький дрон, или просто хочешь попробовать, то пропеллеры можно использовать и самые дешёвые, и не отбалансированные.
Это вряд ли помешает твоему дрону взлететь, да и ты сразу поймёшь, что не так, и на что нужно впредь обращать больше внимания.
Так же крайне не рекомендую начинать с соосной компоновки, если ты не знаком с миром беспилотной авиации. Там есть куча нюансов, которые базируются на более глубоком понимании темы. Идеальным вариантом для начала будет четырёх лучевая, квадратная компоновка.
Ну и нужно понимать, что если ты не крутой инженер, с богатым набором закрытых САПР программ, то всё, что ты можешь рассчитать – мало тебе поможет.
Все эти вычислительные решения дают крайне ориентировочный результат. Так что я рекомендую тебе побольше экспериментировать, хотя помощью софта пренебрегать тоже не стоит. Пробуй, учи матчасть, когда-нибудь получится очень круто!
Уф… Я старался, клавиатуру до стола стёр, выпил ведро кофе. За это ты можешь наградить меня, и поделиться этой статьёй, при помощи кнопок внизу. А если хочешь почаще узнавать что-то новое и полезное, то подписывайся на нас в социальных сетях. Удачи, пилот!
Установка
Как и БЛА, несущие винты могут имеют широкий диапазон размеров. Таким образом, в этой отрасли существует целый ряд «стандартных» диаметров вала двигателя. В связи с чем несущие винты часто поставляются с небольшим набором переходных колец (выглядят как шайбы с отверстиями разного диаметра в центре), которые устанавливают в центральное посадочное отверстие пропа, в случае если диаметр отверстия несущего винта оказался больше диаметра вала используемого мотора.
Фиксироваться винт на моторе может исходя из того, какой из способов крепления поддерживает ваш мотор. Если вал мотора не подразумевает никаких вариантов крепежа (резьб. соединение, различные приспособления для крепления и т.д.), в таком случае применяются специальные адаптеры, такие как пропсейверы и цанговые зажимы.
Бесколлекторные моторы с наружным ротором (типа «Outrunner») как правило, в верхней его части, имеют несколько резьбовых отверстий рассчитанных под установку различных адаптеров и креплений. Не менее популярным вариантом крепления пропеллера на валу БК мотора является самозатягивающая гайка.
