
- Современные роботы и что с ними не так
- «зловещая долина» роботов
- Библиография
- Глубокая и поверхностная структура памяти
- Голограмма и голономия
- Детали
- Другие важные аспекты состояния робота контролируются с помощью датчиков усилия и датчиков – рефераты
- Жесткое тело
- Истоки и развитие
- История
- Катящаяся сфера
- Катящееся колесо
- Классификация физических систем
- Коррелограф
- Критика и альтернативные модели
- Линейно поляризованный свет в оптическом волокне
- Маятник
- Маятник фуко
- Последние исследования
- Преобразование в независимые обобщенные координаты
- Приложения
- Робототехника
- Синаптодендритная паутина
- Яркие исторические робоперсонажи
Современные роботы и что с ними не так
Со дня появления Мистера Телевокса прошло 90 лет. Технологии за это время совершили колоссальный рывок, а человекоподобные роботы как были, так и остались развлекательным или информационным устройством с очень ограниченной сферой применения.
«зловещая долина» роботов
Элементы человеческой внешности, то есть кожа, глаза, волосы, не являются необходимыми для робота, они — не более чем украшение для повышения привлекательности механизма. Большинство антропоморфных роботов представляют собой голый «скелет» (см. случаи российского Фёдора, Atlas от Boston Dynamics, Honda Asimo).
Этим термином обозначается эффект, при котором объекты, выглядящие и действующие как люди, вызывают у наблюдателей отвращение — так как недостаточно на них похожи. Название эффекта произошло от провала на графике, представленном в исследовании японского учёного Масахиро Мори.
Тот в 1978 году провёл опрос, показавший, что в определённый момент похожесть робота на человека уже не привлекает, а отталкивает. Общепринятого объяснения этому психологическому механизму до сих пор не существует. Предполагается, что человек неосознанно замечает внешние отклонения других людей от некой привычной нормальности.
Библиография
- Стивен Платек и др., «Смело идти туда, куда не ушел ни один мозг: будущее эволюционной когнитивной нейробиологии», Futures, октябрь 2020 г., том 43, выпуск 8, 771–776.
- Дидрик Аэртс и др., «Подход квантового взаимодействия в познании, искусственном интеллекте и роботах», Издательство Брюссельского университета, апрель 2020 г.
- Эрвин Ласло, «В защиту интуиции: изучение физических основ спонтанного восприятия», Журнал научных исследований, 2009 г., том 23
- Карл Прибрам, Мозг и восприятие: голономия и структура в обработке изображений (Lawrence Erlbaum Associates, 1991), 125–150.
- Карл Прибрам, Форма внутри (Prospecta Press, 2020).
- Майкл Талбот, Голографическая Вселенная (HarperCollins, 2020).
Глубокая и поверхностная структура памяти
Прибрам предполагает, что существует два уровня кортикальной обработки: поверхностная структура из отдельных и локализованных нейронных цепей и глубокая структура дендритного ветвления, которая связывает поверхностную структуру вместе. Глубокая структура содержит распределенную память, а поверхностная структура действует как механизм поиска.
Связывание происходит за счет временной синхронизации колеблющихся поляризаций в синаптодендритной сети. Считалось, что связывание происходило только тогда, когда не было фазового опережения или запаздывания, но исследование Сола и Хамфри показало, что клетки латерального коленчатого ядра действительно производят их.
Прибрам отмечает, что голографические воспоминания демонстрируют большую емкость, параллельную обработку и адресуемость контента для быстрого распознавания, ассоциативное хранение для перцептивного завершения и для ассоциативного воспоминания. В системах, наделенных памятью, эти взаимодействия, таким образом, приводят к все большему самоопределению.
Голограмма и голономия

Схема одной из возможных схем голограммы.
Основной характеристикой голограммы является то, что каждая часть хранимой информации распределена по всей голограмме. Оба процесса хранения и поиска выполняются способом, описываемым уравнениями преобразования Фурье . Пока часть голограммы достаточно велика, чтобы содержать интерференционный узор , эта часть может полностью воссоздать сохраненное изображение, но изображение может иметь нежелательные изменения, называемые шумом .
Аналогия этому – область вещания радиоантенны. В каждом меньшем отдельном месте в пределах всей области можно получить доступ к каждому каналу, подобно тому, как вся информация голограммы содержится внутри части. Другой аналог голограммы – это то, как солнечный свет освещает объекты в поле зрения наблюдателя.
Неважно, насколько узок луч солнечного света. Луч всегда содержит всю информацию об объекте, и при сопряжении линзой камеры или глазным яблоком создает такое же полное трехмерное изображение. Формула преобразования Фурье преобразует пространственные формы в пространственные волновые частоты и наоборот, поскольку все объекты, по сути, являются колебательными структурами.
Эта нелокальность хранения информации внутри голограммы имеет решающее значение, потому что даже если большинство частей будет повреждено, все будет содержаться даже в одной оставшейся части достаточного размера. Прибрам и другие отметили сходство между оптической голограммой и памятью в человеческом мозге.
Согласно теории голономного мозга, воспоминания хранятся в определенных общих областях, но хранятся нелокально в этих областях. Это позволяет мозгу сохранять функции и память даже при его повреждении. Память теряется только тогда, когда нет частей, достаточно больших, чтобы вместить целое.
Это также может объяснить, почему некоторые дети сохраняют нормальный интеллект, когда удаляются большие части их мозга, а в некоторых случаях половина. Это также может объяснить, почему память не теряется, когда мозг разрезается на разные поперечные сечения. [5]

Одна голограмма может хранить 3D-информацию в 2D-формате. Такие свойства могут объяснить некоторые способности мозга, в том числе способность распознавать объекты под разными углами и размерами, чем в исходной сохраненной памяти.
Прибрам предположил, что нейронные голограммы образованы дифракционными картинами колеблющихся электрических волн в коре головного мозга. Представление происходит как динамическое преобразование в распределенной сети дендритных микропроцессов. Важно отметить разницу между идеей голономного мозга и голографической.
Прибрам не предполагает, что мозг функционирует как единая голограмма. Скорее, волны внутри меньших нейронных сетей создают локализованные голограммы в более крупных частях мозга. Эта патч-голография называется голономией или оконным преобразованием Фурье.
Голографическая модель может также учитывать другие особенности памяти, которые недоступны более традиционным моделям. Модель памяти Хопфилда имеет раннюю точку насыщения памяти, до которой получение памяти резко замедляется и становится ненадежным.
С другой стороны, модели голографической памяти имеют гораздо большую теоретическую емкость памяти. Голографические модели могут также демонстрировать ассоциативную память, хранить сложные связи между различными концепциями и напоминать забывание через « хранение с потерями ».
Детали
Точнее, неголономная система, также называемая анголономной системой, – это система, в которой существует непрерывный замкнутый контур управляющих параметров, с помощью которого система может быть преобразована из любого данного состояния в любое другое состояние.
Поскольку конечное состояние системы зависит от промежуточных значений ее траектории через пространство параметров, система не может быть представлена консервативной потенциальной функцией, как, например, закон обратных квадратов силы тяжести.
Последний является примером голономной системы: интегралы по траекториям в системе зависят только от начального и конечного состояний системы (положений в потенциале), полностью независимо от траектории перехода между этими состояниями. Поэтому система называется интегрируемой , а неголономная – неинтегрируемой .
Когда интеграл по путям вычисляется в неголономной системе, значение представляет собой отклонение в пределах некоторого диапазона допустимых значений, и это отклонение называется анголономией, производимой конкретным рассматриваемым путем. Этот термин был введен Генрихом Герцем в 1894 году.
Общий характер анголономных систем – это неявно зависимые параметры. Если неявную зависимость можно удалить, например, увеличив размерность пространства, тем самым добавив хотя бы один дополнительный параметр, система не является действительно неголономной, а просто не полностью моделируется пространством меньшей размерности.
Напротив, если система по своей сути не может быть представлена независимыми координатами (параметрами), то это действительно анголономная система. Некоторые авторы делают многое из этого, проводя различие между так называемыми внутренними и внешними состояниями системы, но на самом деле все параметры необходимы для характеристики системы, являются ли они репрезентативными для «внутренних» или «внешних» процессов, поэтому различие на самом деле искусственное.
Однако существует вполне реальная и непримиримая разница между физическими системами, которые подчиняются принципам сохранения, и теми, которые не подчиняются. В случае параллельного переноса на сфере различие очевидно: риманово многообразие имеет метрику, принципиально отличную от метрики евклидова пространства .
Для параллельного переноса на сфере неявная зависимость присуща неевклидовой метрике. Поверхность сферы – это двумерное пространство. Повышая размерность, мы можем более ясно увидеть природу метрики, но это по-прежнему фундаментально двумерное пространство с параметрами, безвозвратно завязанными в зависимости от римановой метрики .
Напротив, можно рассматривать XY- плоттер как пример голономной системы, в которой состояние механических компонентов системы будет иметь единственную фиксированную конфигурацию для любого заданного положения пера плоттера. Если перо перемещается между положениями 0,0 и 3,3, шестерни механизма будут иметь одинаковые конечные положения независимо от того, происходит ли перемещение механизмом, сначала увеличиваясь на 3 единицы по оси x, а затем на 3 единицы по оси y. , сначала увеличивая положение оси Y, или выполняя любую другую последовательность изменений положения, которая приводит к конечному положению 3,3.
Поскольку конечное состояние машины одно и то же независимо от пути, пройденного пером плоттера, чтобы добраться до своего нового положения, можно сказать, что конечный результат не зависит от пути . Если мы заменим плоттер черепахи , процесс перемещения пера от 0,0 до 3,3 может привести к тому, что шестерни механизма робота закончатся в разных положениях в зависимости от пути, выбранного для перемещения между двумя положениями.
Другие важные аспекты состояния робота контролируются с помощью датчиков усилия и датчиков – рефераты
Другие важные аспекты состояния робота контролируются с помощью датчиков усилия и датчиков вращающего момента.Без этих датчиков нельзя обойтись, если роботы предназначены для работы с хрупкими объектами или объектами, точная форма и местонахождение которых неизвестны. Можно представить себе, что робототехнический манипулятор с максимальным усилием сжатия и одну тонну закручивает в патрон электр
ическую лампочку. При этом очень трудно предотвратить такую ситуацию, что робот приложит слишком большое усилие и раздавит лампочку. Но датчики усилия позволяют роботу ощутить, насколько крепко он держит лампочку, а датчики вращающего момента – определить, с каким усилием он ее поворачивает. Хорошие датчики позволяют измерять усилия втрех направлениях переноса и трех направлениях вращения.
Исполнительные механизмы являются теми средствами, с помощью которых роботы передвигаются и изменяют форму своего тела. Для того чтобы представить основные особенности конструкции исполнительных механизмов, необходимо вначале рассмотреть абстрактные понятия движения и формы, используя концепцию степени свободы.Как степень свободы мы будем рассматривать каждое независимое направление, в котором могут передвигаться либо робот, либо один из его исполнительных механизмов. Например, твердотельный свободно движущийся робот, такой как автономный подводный аппарат, имеет шесть степеней свободы; три из них, (х, у, z), определяют положение робота в пространстве, а три других – его угловую ориентацию по трем осям вращения, известную как качание (yaw), поворот (roll) и наклон (pitch). Эти шесть степеней свободы определяют кинематическое состояниеили позуробота. Динамическое состояниеробота включает по одному дополнительному измерению для скорости изменения каждого кинематического измерения.
![]() а) б)
а) б)
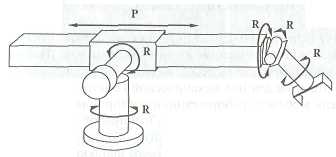
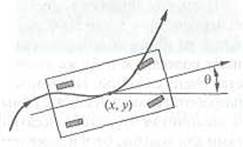
Рис. 2.2 – Особенности конструкции манипулятора робота: станфордский манипулятор (Stanford Manipulator) – один из первых манипуляторов робота, в котором используются пять поворотных шарниров (R) и одно призматическое сочленение (Р), что позволяет получить в целом шесть степеней свободы (а); траектория движения неголономного четырехколесного транспортного средства с рулевым управлением от передних колес (б).
Роботы, не являющиеся твердотельными, имеют дополнительные степени свободы внутри самих себя. Например, в руке человека локоть имеет одну степень свободы (может сгибаться в одном направлении), а кисть имеет три степени свободы (может двигаться вверх и вниз, из стороны в сторону, а также вращаться). Каждый из шарниров робота также имеет 1, 2 или 3 степени свободы. Для перемещения любого объекта, такого как рука, в конкретную точку с конкретной ориентацией необходимо иметь шесть степеней свободы. Рука, показанная на рис. 2.2, а, имеет точно шесть степеней свободы, создаваемых с помощью пяти поворотных шарниров, которые формируют вращательное движение, и одного призматического сочленения, который формирует скользящее движение. Чтобы убедиться в том, что рука человека в целом имеет больше шести степеней свободы, можно провести простой эксперимент: положите кисть на стол и убедитесь в том, что вы еще имеете возможность поворачивать руку в локте, не меняя положения кисти на столе. Манипуляторами, имеющими больше степеней свободы, чем требуется для перевода конечного исполнительного механизма в целевое положение, проще управлять по сравнению с роботами, имеющими лишь минимальное количество степеней свободы.
В мобильных роботах количество степеней свободы не обязательно совпадает с количеством приводимых в действие элементов. Рассмотрим, например, обычный автомобиль: он может передвигаться вперед или назад, а также поворачиваться, что соответствует двум степеням свободы. В отличие от этого кинематическая конфигурация автомобиля является трехмерной – на открытой плоской поверхности можно легко перевести автомобиль в любую точку (х, у), с любой ориентацией (см. рис. 2.2, б). Таким образом, автомобиль имеет три эффективные степени свободы,но две управляемые степени свободы.Робот называется неголономным,если он имеет больше эффективных степеней свободы, чем управляемых степеней свободы, и голономным,если эти два значения совпадают. Голономные роботы проще в управлении (было бы намного легче припарковать автомобиль, способный двигаться не только вперед и назад, но и в стороны), однако голономные роботы являются также механически более сложными. Большинство манипуляторов роботов являются голономными, а большинство мобильных роботов – неголономными.
В мобильных роботах применяется целый ряд механизмов для перемещения в пространстве, включая колеса, гусеницы и ноги. Роботы с дифференциальным приводомоборудованы расположенными с двух сторон независимо активизируемыми колесами (или гусеницами, как в армейском танке). Если колеса, находящиеся с обеих сторон, вращаются с одинаковой скоростью, то робот движется по прямой. Если же они вращаются в противоположных направлениях, то робот поворачивается на месте. Альтернативный вариант состоит в использовании синхронного привода,в котором каждое колесо может вращаться и поворачиваться вокруг вертикальной оси. Применение такой системы привода вполне могло бы привести к хаотическому перемещению, если бы не использовалось такое ограничение, что все пары колес поворачиваются в одном направлении и вращаются с одинаковой скоростью. И дифференциальный, и синхронный приводы являются неголономными. В некоторых более дорогостоящих роботах используются голономные приводы, которые обычно состоят из трех или большего количества колес, способных поворачиваться и вращаться независимо друг от друга.
Ноги, в отличие от колес, могут использоваться для передвижения не по плоской поверхности, а по местности, характеризующейся очень грубым рельефом. Тем не менее, на плоских поверхностях ноги как средства передвижения значительно уступают колесам, к тому же задача создания для них механической конструкции является очень сложной. Исследователи в области робототехники предприняли попытки разработать конструкции с самым разным количеством ног, начиная от одной ноги и заканчивая буквально десятками. Были разработаны роботы, оборудованные ногами для ходьбы, бега и даже прыжков (как показано на примере шагающего робота на рис. 2.3, а). Этот робот является динамически устойчивым;это означает, что он может оставаться в вертикальном положении, только непрерывно двигаясь. Робот, способный оставаться в вертикальном положении, не двигая ногами, называется статически устойчивым.Робот является статически устойчивым, если центр его тяжести находится над многоугольником, охваченным его ногами.
В мобильных роботах других типов для передвижения используются иные, чрезвычайно разнообразные механизмы. В летательных аппаратах обычно применяются пропеллеры или турбины. Роботизированные дирижабли держатся в воздухе за счет тепловых эффектов. В автономных подводных транспортных средствах часто используются подруливающие устройства, подобные тем, которые устанавливаются на подводных лодках.
Жесткое тело
Частицы твердого тела подчиняются голономной связи
- (ря-рj)2-Lяj2знак равно0,{ displaystyle ( mathbf {r} _ {i} – mathbf {r} _ {j}) ^ {2} -L_ {ij} ^ {2} = 0, ,}

где , – соответственно положения частиц и , – расстояние между ними.
ря{ displaystyle mathbf {r} _ {i} , !}рj{ Displaystyle mathbf {r} _ {j} , !}пя{ Displaystyle P_ {я} , !}пj{ Displaystyle P_ {j} , !}Lяj{ Displaystyle L_ {ij} , !}





Истоки и развитие
В 1946 году Деннис Габор математически изобрел голограмму, описав систему, в которой изображение может быть реконструировано с помощью информации, хранящейся в голограмме. Он продемонстрировал, что информационный паттерн трехмерного объекта может быть закодирован в луче света, который является более или менее двумерным.
Габор также разработал математическую модель для демонстрации голографической ассоциативной памяти . Один из коллег Габора, Питер Якобус Ван Херден, также разработал связанную голографическую математическую модель памяти в 1963 году. Эта модель содержала ключевой аспект нелокальности, который стал важным спустя годы, когда в 1967 году эксперименты Брайтенберга и Киршфилда показали, что точная локализация памяти в мозгу была ложной.
Карл Прибры работали с психологом Лешл на Лешли в инграмме экспериментах, которые использовали повреждение , чтобы определить точное местонахождение конкретных воспоминаний в приматах мозга. Лэшли сделал небольшие повреждения в мозгу и обнаружил, что они мало влияют на память.
С другой стороны, Прибрам удалил большие участки коры головного мозга, что привело к множеству серьезных нарушений памяти и когнитивных функций. Воспоминания не хранились в одном нейроне или точном месте, а были распределены по всей нейронной сети. Лэшли предположил, что паттерны вмешательства в мозг могут играть роль в восприятии, но не был уверен, как такие паттерны могут генерироваться в мозгу или как они могут привести к его функциям.
Несколько лет спустя в статье нейрофизиолога Джона Эклза описывается, как волна может генерироваться на концах ветвления пресинаптических аксонов. Несколько таких волн могут создавать интерференционные картины. Вскоре после этого Эммету Лейту удалось сохранить визуальные образы через интерференционные картины лазерных лучей, вдохновленные предыдущим использованием Габором преобразований Фурье для хранения информации внутри голограммы.
Изучив работы Эклза и Лейта, Прибрам выдвинул гипотезу о том, что память может принимать форму интерференционных паттернов, напоминающих голограммы, созданные лазером. Физик Дэвид Бом представил свои идеи голодвижения и имплицитно-экспликационного порядка .
Прибрам узнал о работе Бома в 1975 году и понял, что, поскольку голограмма может хранить информацию в рамках интерференционных паттернов, а затем воссоздавать эту информацию при активации, она может служить сильной метафорой для функции мозга. Прибрам был дополнительно воодушевлен в этой линии предположений тем фактом, что нейрофизиологи Рассел и Карен Де Валуа вместе установили, что «кодирование пространственной частоты, отображаемое клетками зрительной коры, лучше всего описывается как преобразование Фурье входного паттерна».
История
Н. М. Феррерс впервые предложил расширить уравнения движения с неголономными связями в 1871 году. Он ввел выражения для декартовых скоростей в терминах обобщенных скоростей. В 1877 г. Э. Раус написал уравнения с множителями Лагранжа. В третьем издании своей книги о линейных неголономных связях твердых тел он ввел форму с множителями, которая теперь называется уравнениями Лагранжа второго рода с множителями.
Термины голономные и неголономные системы были введены Генрихом Герцем в 1894 году. В 1897 году С.А. Чаплыгин впервые предложил составлять уравнения движения без множителей Лагранжа. При определенных линейных ограничениях он ввел в левую часть уравнений движения группу дополнительных членов типа оператора Лагранжа.
Катящаяся сфера
Этот пример является расширением рассмотренной выше проблемы «катящегося колеса» с более математической трактовкой.
Рассмотрим трехмерную ортогональную декартову систему координат, например, столешницу уровня с точкой, отмеченной на ней в качестве начала координат, и осями x и y, нанесенными карандашными линиями. Возьмите сферу единичного радиуса, например, мяч для пинг-понга, и отметьте точку B синим цветом.
В соответствии с этой точки является диаметр сферы, а плоскость , ортогональная к этому диаметру , расположенным в центре С сферы определяет большой круг , называемый экватор , связанный с точкой B . На этом экваторе выберите другую точку R и отметьте ее красным.
Расположите сферу на плоскости z = 0 так, чтобы точка B совпадала с началом координат, C располагалась в точке x = 0, y = 0, z = 1, а R располагалась в точке x = 1, y = 0, и z = 1, т.е.
Теперь сферу можно катать по любой непрерывной замкнутой траектории в плоскости z = 0, не обязательно по односвязной траектории, таким образом, чтобы она не скользила и не скручивалась, так что C возвращается к x = 0, y = 0, z = 1.
В общем, точка B больше не совпадает с началом координат, а точка R больше не проходит вдоль положительной оси x . Фактически, путем выбора подходящего пути сфера может быть переориентирована с начальной ориентации на любую возможную ориентацию сферы, при этом C находится в точках x = 0, y = 0, z = 1.
Таким образом, система неголономна. Анголономия может быть представлена дважды уникальным кватернионом ( q и – q ), который при применении к точкам, представляющим сферу, переносит точки B и R на их новые позиции.
Катящееся колесо
Рассмотрим колесо велосипеда, которое припарковано в определенном месте (на земле). Изначально клапан накачки находится в одном положении. Если велосипед ездил вокруг, а затем на стоянке в точно том же самом месте, клапан будет почти наверняка не будет в таком же положении , как и раньше, и ее новое положение зависит от пути.
Классификация физических систем
Чтобы изучать классическую физику строго и методично, нам необходимо классифицировать системы. Основываясь на предыдущем обсуждении, мы можем классифицировать физические системы на голономные системы и неголономные системы . Одним из условий применимости многих теорем и уравнений является то, что система должна быть голономной системой.
Коррелограф
В 1969 году ученые Д. Уилшоу, О. П. Бунеман и Х. Лонге-Хиггинс предложили альтернативную, неголографическую модель, которая удовлетворяла многим из тех же требований, что и исходная голографическая модель Габора. Модель Габора не объясняла, как мозг может использовать анализ Фурье входящих сигналов или как он будет справляться с низким отношением сигнал-шум в реконструированных воспоминаниях.
Модель коррелографа Лонге-Хиггина основана на идее, что любая система может выполнять те же функции, что и голограф Фурье, если она может коррелировать пары паттернов. Он использует крошечные отверстия, которые не создают дифракционных картин, для создания реконструкции, подобной той, что используется в голографии Фурье.
Подобно голограмме, дискретный коррелограф может распознавать смещенные узоры и хранить информацию параллельным и нелокальным образом, поэтому обычно она не будет разрушена локализованным повреждением. Затем они расширили модель за пределы коррелографа до ассоциативной сети, где точки стали параллельными линиями, расположенными в сетке.
Горизонтальные линии представляют аксоны входных нейронов, а вертикальные линии представляют выходные нейроны. Каждое пересечение представляет собой изменяемый синапс. Хотя он не может распознать смещенные шаблоны, он имеет большую потенциальную емкость.
Это не обязательно должно было показать, как устроен мозг, но вместо этого показать возможность улучшения исходной модели Габора. П. Ван Хеерден опроверг эту модель, математически продемонстрировав, что отношение сигнал / шум голограммы может достигать 50% от идеального.
Он также использовал модель с сетью нейронных голограмм 2D для быстрого поиска, накладываемого на сеть 3D для большой емкости памяти. Ключевым качеством этой модели было ее гибкость, позволяющая изменять ориентацию и исправлять искажения хранимой информации, что важно для нашей способности распознавать объект как один и тот же объект с разных углов и положений, чего не хватает моделям коррелографических и ассоциативных сетей.
Критика и альтернативные модели
Голономная модель функции мозга Прибрама не получила широкого внимания в то время, но с тех пор были разработаны другие квантовые модели, в том числе динамика мозга Джибу и Ясуэ и диссипативная квантовая динамика мозга Витиелло. Хотя они напрямую не связаны с голономной моделью, они продолжают выходить за рамки подходов, основанных исключительно на классической теории мозга.
Линейно поляризованный свет в оптическом волокне
Возьмите оптическое волокно, скажем, три метра, и проложите его по абсолютно прямой линии. Когда вертикально поляризованный луч вводится с одного конца, он выходит с другого конца, все еще поляризованный в вертикальном направлении. Отметьте верх волокна полосой, соответствующей ориентации вертикальной поляризации.
Теперь плотно намотайте волокно на цилиндр диаметром десять сантиметров. Теперь путь волокна описывает спираль, которая, как и круг, имеет постоянную кривизну . Спираль также обладает интересным свойством постоянного кручения .
Когда линейно поляризованный свет снова вводится на одном конце с ориентацией поляризации, совпадающей с полосой, он, как правило, появляется как линейно поляризованный свет, выровненный не с полосой, а под некоторым фиксированным углом к полосе, в зависимости от длина волокна, шаг и радиус спирали.
Эта система также неголономна, поскольку мы можем легко свернуть волокно в виде второй спирали и выровнять концы, возвращая свет в исходную точку. Таким образом, анголономия представлена отклонением угла поляризации с каждым контуром волокна. При соответствующей настройке параметров становится ясно, что может быть получено любое возможное угловое состояние.
Маятник

Простой маятник
Как показано справа, простой маятник представляет собой систему, состоящую из груза и веревки. Трос прикреплен на верхнем конце к оси, а на нижнем конце к грузу. Длина строки нерастяжима, поэтому она постоянна. Следовательно, эта система голономна; он подчиняется голономной связи
- Икс2 y2-L2знак равно0,{ displaystyle {x ^ {2} y ^ {2}} – L ^ {2} = 0,}

где – положение груза, а – длина струны.
(Икс, y){ Displaystyle (х, у) , !}L{ Displaystyle L , !}


Маятник фуко
Классическим примером неголономной системы является маятник Фуко . В локальной системе координат маятник качается в вертикальной плоскости с определенной ориентацией по отношению к географическому северу в начале пути. Неявная траектория системы – это линия широты на Земле, на которой расположен маятник.
Несмотря на то, что маятник неподвижен в системе отсчета Земли, он движется в системе отсчета, относящейся к Солнцу, и вращается синхронно со скоростью вращения Земли, так что единственное видимое движение плоскости маятника – это движение, вызванное вращением Земля.
Эта последняя система координат считается инерциальной системой отсчета, хотя она также является неинерциальной в более тонких отношениях. Хорошо известно, что земной каркас не инерционен, и этот факт становится очевидным благодаря очевидному присутствию центробежных сил и сил Кориолиса .
Движение вдоль линии широты параметризуется течением времени, и плоскость колебаний маятника Фуко, кажется, вращается вокруг местной вертикальной оси с течением времени. Угол поворота этой плоскости в момент времени t относительно начальной ориентации и есть анголономия системы.
Анголономия, вызванная полным кругом широты, пропорциональна телесному углу, образуемому этим кругом широты. Путь не обязательно должен быть ограничен кругами широты. Например, маятник может быть установлен в самолете. Анголономия по-прежнему пропорциональна телесному углу, образуемому траекторией, которая теперь может быть совершенно нерегулярной. Маятник Фуко – физический пример параллельного переноса .
Последние исследования
В то время как Прибрам первоначально разработал теорию голономного мозга как аналогию некоторых мозговых процессов, в нескольких статьях (в том числе в некоторых более поздних работах самого Прибрама) было высказано предположение, что сходство между голограммой и некоторыми функциями мозга не просто метафорическое, а фактически структурное.
Другие по-прежнему утверждают, что это только аналогичные отношения. Несколько исследований показали, что те же самые серии операций, которые используются в моделях голографической памяти, выполняются в определенных процессах, касающихся временной памяти и оптомоторных реакций .
Это указывает как минимум на возможность существования неврологических структур с определенными голономными свойствами. Другие исследования продемонстрировали возможность того, что излучение биофотонов (биологические электрические сигналы, которые преобразуются в слабые электромагнитные волны в видимом диапазоне) может быть необходимым условием для электрической активности в мозге для хранения голографических изображений.
Они могут играть роль в клеточной коммуникации и определенных процессах мозга, включая сон, но необходимы дальнейшие исследования, чтобы укрепить существующие. Другие исследования показали корреляцию между более развитой когнитивной функцией и гомеотермией .
Преобразование в независимые обобщенные координаты
Уравнения голономных связей могут помочь нам легко удалить некоторые зависимые переменные в нашей системе. Например, если мы хотим удалить параметр в уравнении ограничения , мы можем преобразовать уравнение в следующую форму, предполагая, что это можно сделать,
Иксd{ displaystyle x_ {d} , !}жя{ displaystyle f_ {i} , !}


- Иксdзнак равнограммя(Икс1, Икс2, Икс3, …, Иксd-1, Иксd 1, …, ИксN, т),{ Displaystyle x_ {d} = g_ {i} (x_ {1}, x_ {2}, x_ {3}, dots, x_ {d-1}, x_ {d 1}, точки, x_ {N}, t), ,}

и замените в каждом уравнении системы указанную выше функцию. Это всегда можно сделать для общей физической системы, при условии , что есть , то по теореме о неявной функции , решение гарантировано в некотором открытом множестве. Таким образом, можно удалить все вхождения зависимой переменной .
Иксd{ displaystyle x_ {d} , !}жя{ displaystyle f_ {i} , !}C1{ Displaystyle С ^ {1} , !}граммя{ displaystyle g_ {i} ,}Иксd{ displaystyle x_ {d} , !}Предположим, что у физической системы есть степени свободы. Теперь на систему накладываются голономные ограничения. Затем количество степеней свободы уменьшается до . Мы можем использовать независимые обобщенные координаты ( ), чтобы полностью описать движение системы. Уравнение преобразования можно выразить следующим образом:
N{ Displaystyle N , !}час{ Displaystyle ч , !}мзнак равноN-час{ displaystyle m = Nh , !}м{ Displaystyle м , !}qj{ displaystyle q_ {j} , !}







- Иксязнак равноИкся(q1, q2, …, qм, т) ,язнак равно1, 2, …N.{ displaystyle x_ {i} = x_ {i} (q_ {1}, q_ {2}, ldots, q_ {m}, t) , qquad qquad qquad i = 1, 2, ldots N. ,}

Приложения
Голографические модели памяти и сознания могут быть связаны с несколькими расстройствами мозга, включающими разъединение сенсорных входов в едином сознании, включая синдром Шарля Бонне , дизъюнктивную агнозию и шизофрению . Пациенты с синдромом Шарля Бонне переживают два совершенно разных мира в одном сознании.
Они видят мир, который воспринимают психологически нормальные люди, но также и упрощенный мир, пронизанный псевдогаллюцинациями . Эти пациенты могут легко различать эти два мира. Поскольку теории динамического ядра и глобального рабочего пространства настаивают на том, что за сознание отвечает отдельная область мозга, единственный способ восприятия пациентом двух миров – это разделение этого динамического ядра и глобального рабочего пространства.
Но это не объясняет, как различный контент может быть воспринят в рамках одного единого сознания, поскольку эти теории предполагают, что каждое динамическое ядро или глобальное рабочее пространство создает единую согласованную реальность. Первичный симптом дизъюнктивной агнозии – несогласованность сенсорной информации в едином сознании.
Они могут видеть одно, но слышать что-то совершенно несовместимое с этим изображением. Шизофреники часто сообщают о переживании мыслей, которые, кажется, не исходят от них самих, как если бы идея была введена экзогенно. Человек не чувствует контроля над определенными мыслями, существующими в его сознании.
Робототехника
В робототехнике неголономность особенно изучалась в области планирования движения и линеаризации с обратной связью для мобильных роботов . Обратитесь к голономной робототехнике для более подробного описания.
Синаптодендритная паутина

Некоторые из различных типов синапсов
Согласно классической теории мозга, суммирование электрических сигналов, поступающих на дендриты и сомы (тело клетки) нейрона, либо подавляет нейрон, либо возбуждает его, вызывая потенциал действия по аксону, где он синапсируется со следующим нейроном.
Однако это не учитывает различные разновидности синапсов, помимо традиционных аксодендритов (от аксона до дендрита). Есть свидетельства существования других видов синапсов, включая последовательные синапсы, а также синапсы между дендритами и сомой, а также между различными дендритами.
Процессы в этой дендритной ветви, сети теледендронов и дендритов, происходят из-за колебаний поляризации в мембране тонковолокнистых дендритов, а не из-за распространяющихся нервных импульсов, связанных с потенциалами действия. Прибрам утверждает, что продолжительность задержки входного сигнала в дендритной ветви до того, как он пройдет по аксону, связана с ментальным осознанием.
Чем короче задержка, тем бессознательнее действие, а более длительная задержка указывает на более длительный период осознания. Исследование Дэвида Алкона показало, что после бессознательного Павловского кондиционирования происходило пропорционально большее уменьшение объема дендритных ветвей, подобное синаптическому устранению, когда опыт увеличивает автоматичность действия.
В то же время дендритная сеть чрезвычайно сложна, способна принимать от 100 000 до 200 000 входных данных в одном дереве из-за большого количества ветвлений и множества дендритных шипов, выступающих из ветвей. Более того, синаптическая гиперполяризация и деполяризация остаются в некоторой степени изолированными из-за сопротивления со стороны узкого дендритного стержня шипа, позволяя поляризации распространяться без значительного прерывания на другие шипы.
Этому распространению дополнительно способствуют внутриклеточные микротрубочки и внеклеточно – глиальные клетки . Эти поляризации действуют как волны в синаптодендритной сети, и существование сразу нескольких волн приводит к интерференционным картинам.
Яркие исторические робоперсонажи
В 1927 году, спустя семь лет после написания
R.U.R., американская Westinghouse Electric Company представила Мистера Герберта Телевокса — робота, принимавшего через телефон сигналы, которые активировали заложенную в нём программу. По утверждению создателя, Телевокс мог включить плиту или проверить, работает ли свет в доме.


, цена 4600 руб")




