

- Селфидрон — что это и как им управлять
- Балансировка
- Балансировка пропеллеров с помощью подручных средств
- Виды калибровки
- Защита несущих винтов
- И еще об интересном…
- Калькулятор ecalc
- Лопасти и диаметр
- Материалы для несущих винтов
- Методы установки
- Механические проблемы
- Подключение через wifi
- Проверьте пропеллеры
- Проверьте схему двигателей (mixer)
- Размер рамы и пропеллера
- Расчёт коптера-ликбез — wiki о коптерах
- Режимы
- Советы и типичные ошибки
- Управление дроном с помощью пульта или смартфона на выбор пользователя
- Шаг. эффективность. тяга
Селфидрон — что это и как им управлять
Это тип квадрокоптеров, которые ориентированы исключительно на работу с мобилкой. У таких моделей не редкость отсутствие пульта. Поэтому устройство по стоимости дешевле в 2-3 раза привычного нам квадрокоптера.
Предназначение такого гаджета — возможность сделать селфи с высоты в несколько метров. При использовании селфи-палки, в кадр часто попадает только верх туловища и совсем немного красот на фоне. Селфи-дрон решает эту проблему. Он позволяет снять даже самую большую компанию в полный рост и так, чтобы все поместились в кадр.
Чтобы лучше понять особенности устройства, смотрите его плюсы и минусы в таблице:
Следует учесть, селфидроны в большинстве случаев управляются только с мобилки. Так что тем, кто привык к физическому джойстику будет сложно перестроиться.Подытоживая вышеописанное, управлять квадрокоптером со смартфона сможет каждый! Главное, дать себе немного времени привыкнуть к новому стилю контроля.
Ликбез: Как выбрать квадрокоптер для ребенка: 6 основных критериев
Балансировка
Плохая балансировка часто встречается у недорогих винтов. Проверить это легко, вставьте в посадочное отверстие карандаш, если существует дисбаланс, одна сторона будет тяжелей. Поэтому перед установкой проверяйте балансировку Если ваш винт не отбалансирован, появится вибрация (она плохо влияет на работу контроллера полета), увеличится шум, более быстрый износ силовой установки, ухудшение качества съемки.

Сделать балансировку можно несколькими способами, но если вы строите беспилотник самостоятельно, лучше приобретите спец. инструмент – балансир пропеллеров. Чтобы уравновесить баланс вы можете провести шлифовку тяжелой части пропеллера/наклеить кусочек скотча (на более легкую лопасть). Учтите, очень важно делать все «процедуры» как можно дальше от центра пропеллера (из-за принципа крутящего момента)
Балансировка пропеллеров с помощью подручных средств
Можно с уверенностью сказать, что большинство пропеллеров, особенно дешевых, нельзя назвать сбалансированными на 100%. Такие винты не только раздражающе сильно шумят, но и вносят дополнительную вибрацию в работу ВМГ. Из-за этого, в частности, снижается качество воздушных съемок (эффект желе).
Как видим, без процедуры балансировки винтов для квадрокоптера нам не обойтись. Для этого понадобятся:
- Винт;
- Скотч или суперклей (можно заменить лаком для ногтей);
- Наждачная бумага;
- Специальный балансир пропеллеров Du-Bro Tru-Spin – один из лучших, или китайские аналоги.
Лопасть проверяется на отсутствие повреждений, устанавливается на ось и слегка отклоняется в ту или иную сторону. Если он не возвращается в горизонтальное положение, нужно облегчить (подчистить наждачной бумагой) более тяжелое лезвие или наклеить кусочек липкой ленты на более легкое.
Ось балансировочного станка переворачивается – нужно убедиться, что пропеллер сохраняет равновесие и в этом положении. Отметим, что все подчистки и наклеивания должны выполняться на внутренних (вогнутых) поверхностях лопастей.
Следующим шагом будет балансировка ступицы. Для этого пропеллер устанавливается вертикально. Если он отклоняется вправо, нужно утяжелять клеем или лаком левую часть ступицы и наоборот. Добиваемся баланса, переворачиваем пропеллер и убеждаемся, что в этом положении он также уравновешен. Процедура закончена.
Купленные дешевые пропеллеры не могут быть на 100% сбалансированными, только если это не оптовый сбыт фирменных пропеллеров. Такие пропеллеры негативно влияют на работу ВМГ, что вызывает дополнительные вибрации и вследствие чего появляется “эффект желе” при съёмках видео.
В данном случае потребует процедура балансировки реквизитов для квадрокоптера. Для её выполнения потребуется:
- винт;
- скотч;
- суперклей (если не нашелся скотч);
- наждачная бумага;
- балансир для пропеллеров (в данном примере рассматривается – Du-Bro Tru-Spin, или можно использовать китайские аналоги, как на видео);
Перед балансировкой лопасти необходимо проверить на отсутствие повреждений, затем установить на ось и немного отклонить в нужную сторону. Далее смотрим на горизонтальное положение пропеллера, удалось ли ему вернуться после отклонения. Если нет, то нужно облегчить более тяжелую лопасть (наждачной бумагой).
При повороте балансировочного станка, необходимо удостовериться, что пропеллер держит равновесие в таком положении. Подчеркнем, что все процедуры по утяжелению и облегчению лопастей необходимо производить с внутренней стороны (вогнутых).
Далее проделываем процедуру балансировки ступицы. Перемещаем пропеллер вертикально, и смотрим, если есть отклонения в одну сторону, то утяжелять нужно противоположенную. Утяжелять можно с помощью лака или суперклея. Достигаем баланса, меняем положение – переворачиваем, и удостоверяемся, что баланс достигнут и с другой стороны. На этом балансировка лопастей пропеллера закончена.
Виды калибровки
- Механическая калибровка квадрокоптера
Механическая калибровка, это подкручивание регулятора тяги. Подкручиваешь регулятор, поднимаешь дрон, если проблема осталась – повторяешь. Используется тогда, когда отклонение от нужной оси не очень велико. - Автоматическая калибровка квадрокоптера
Автоматическая калибровка, это настройка работы дрона с пульта управления. Применяется, когда нужно сместить триммер на 5 и более позиций. Она происходит по-разному, в зависимости от пульта и контроллера. Придётся обратиться к инструкции. - С помощью ПО mission planer
Это программа для калибровки плат Ardupilot. Она позволяет программно задать нужные параметры. Как правило, калибровка через неё происходит перед первым запуском самодельного коптера.
Калибровка происходит следующим образом:
- Включаем передатчик радиоуправления (на момент калибровки регуляторов радиоуправление должно быть уже откалибровано). Выставляем ручку газа на максимум
- Берем Li-Po аккумулятор и подключаем к разъему Power-модуля для включения автопилота. Питание регуляторов соответственно тоже будет обеспечивать этот аккумулятор
- После включения APM будет мигать своими синими и красными светодиодами. Этим он сигнализирует готовность к калибровке при следующем включении. Отключаем аккумулятор от Power-модуля
- Включаем питание заново. Регуляторы издают стандартный звуковой сигнал (обычно количество сигналов равно количеству банок в батарее) и через некоторое время дважды издает короткий сигнал, что подтверждает калибровку по максимальному газу
- Опускаем ручку газа в минимальное положение. Регуляторы издают один долгий сигнал, что подтверждает калибровку по минимальному газу
- С этого момента калибровка регуляторов для APM 2.8 завершена и можно проверить работоспособность моторов
- Убираем газ на минимум и выключаем питание Ardupilot.
Защита несущих винтов
Защита винтов создана для того, чтобы обезопасить беспилотник от встречных объектов, тем самым минимизировать последствия от краша. Крепится защита к раме и покрывает частично или полностью рабочую зону установки. Чаще используется на маленьких беспилотниках.
Элементы защиты могут:
- Вызвать лишнюю вибрацию
- Не выдерживают сильные удары
- Может привести к снижению тяги (если слишком много крепежных опор)

И еще об интересном…
Калькулятор ecalc
Для расчета винтомоторных параметров, при создании своих моделей беспилотных летательных аппаратов, есть очень удобный сервис – eCalc. Многие, кто собирает квадрокоптеры своими руками знают про этот онлайн калькулятор. Раздел, где приводятся параметры расчетов для квадрокоптеров, выглядит следующим образом.
Сперва может показаться, что всё понятно. Но следует знать о некоторых моментах, которые сильно влияют на результаты произведенных вычислений.
Первоначально, необходимо указать взлётный вес коптера. Если имеются подвесы и камеры, то их тоже нужно включить в этот параметр. Если сервис показывает Without Drive (что значит “без привода”), то нужно указать общий вес рамы, и вес других составных частей, таких как:
- пропеллеры;
- платы;
- контроллер;
- подвеса;
- камера;
- оборудование для FPV полетов.
Также необходимо прибавить к массе 10%, которую займут провода. На выходе получается искомая цифра полного взлетного веса квадрокоптера.
Указываем общее число роторов, по какой схеме они расположены – одиночной или соосной. Указываем верхнюю планку высоту полёта, погодные условия при полете – температура воздуха и атмосферное давление).
В выпадающем списке предлагается выбрать аккумулятор. При отсутствии нужной батареи, выбирайте ту что ближе подходит по токоотдаче и емкости. Далее, система завершит заполнение полей сама. Указываем вес и структуру батареи. При необходимости установить дополнительные АКБ, в текстовом поле P укажите их число. А в поле Weight указывается их суммарный вес.
Поле этого, в выпадающем списке указываем тип ESC, так называемый макс. ток этих регуляторов.
Указываем производителя моторов. В окне появляется его оценка. По показателям KV указывается нужный образец.
Теперь указываем параметры пропеллеров – тип, диаметр и шаг. По возможности, применяйте винт с максимально допустимым диаметром для данной рамы. Указывайте передаточное число, если у привода зубчатая трансмиссия. Количество зубьев направляющей шестерни к ведомой.
Если система не выдает нужных параметров, то можно указать в текстовом поле Custom. И там указать нужные параметры для расчета в калькуляторе. Имейте ввиду, что в одну ячейку указываются параметры батареи.
После заполнения всех полей, производится вычисления. На выходе вы получите необходимые данные. Они изображены в виде графиков, списков и циферблатов.
Лопасти и диаметр
Традиционно винты мультироторных беспилотников с 2-3 лопастями. Но более популярны винты с 2 лопастями. Помните, большее кол-во лопастей не увеличит тягу. Каждая отдельная лопасть работает в потоке пред. лопасти из-за чего коэффициент полезного действия снижается.

Материалы для несущих винтов
Материал из которых сделаны несущие винты, немного влияют на летные качества, но помните, что на первом месте должна быть именно безопасность (основная функция винтов).
- Пластик – самый популярный материал, он отличается низкой ценой, отличными летными хар-ми и долговечностью. Вы можете усилить винты карбоновой пленкой, это обеспечит большую устойчивость к ударам и будет дешевле, чем винт из карбона.

- Полимеры – винты из углеродного волокна подойдут пилотам с опытом. Стоимость выше, за счет сложности изготовления. Такие винты сложнее повредить, но учтите, что при падении будет ущерб всему с чем он соприкоснется. Винты из карбона, отлично исполнены, более выносливые за счет жесткости, практически не нуждаются в балансировке и очень легкие. Но еще раз, смотри в сторону винтов из этих материалов исключительно, если у вас есть опыт.

- Древесина – очень редко используют дерево для создания несущих винтов, на изготовление таких винтов уходит больше времени, сложнее в обработке, в итоге они выйдут дороже пластиковых. Но дерево очень плотное и не гнётся.

Методы установки
Есть разные способы установки винтов на квадрокоптер. Зачастую вал электромотора — это ничто иное, как металлический штырь. Без каких-либо вспомогательных элементов для установки винта. Для таких случаев используют цанговые зажимы и пропсейверы – это специальные переходники.
При создании своих моделей квадрокоптеров, удобно использовать пропсейверы (см. на фото) Пропсейвер похож на втулку. В боковой части поверхности имеются по одному отверстию с каждой стороны, выполненных симметрично. Такая конструкция устанавливается на вал, и затягивается винтами. Далее пропеллер нужно надеть на вал и закрепить нейлоновыми стяжками, также есть вариант крепления резиновыми кольцами.
Цанговый зажим является более надежным, по сравнению с пропсейвером. Его конструкция построена конусообразной втулкой с резьбовым соединением. Сначала на вал устанавливается цанга, затем идет зажимная втулка с пропеллером и шайбой. Весь переходник закрепляется коком – гайкой, особой формы.
На моторах класса Outrunner, где ротор бесколлекторного электродвигателя находится с внешней стороны, в верхней части конструкции присутствует несколько отверстий, предназначенных для установки различных типов переходников и креплений.
Компания DJI, при производстве своих квадрокоптеров на бесколлекторных моторах, устанавливают самозатягивающиеся гайки. Резьба на валах такого типа двигателей, роторы которых вращаются в противоположенную сторону.
Установить винты на квадрокоптер можно по-разному. Очень часто вал электродвигателя представляет собой простой металлический штырь, не имеющий каких-либо приспособлений для установки пропеллера. В этом случае применяют специальные переходники – пропсейверы и цанговые зажимы.
Пропсейвер (см. фото) удобно использовать для проведения экспериментов при создании самодельных моделей. Он выглядит как втулка, в боковой поверхности которой имеется два симметричных отверстия с установленными в них винтами. Приспособление устанавливается на вал, а винты затягиваются. Пропеллер также надевается на вал и фиксируется двумя нейлоновыми стяжками или резиновым кольцом.
Более надежным переходником является цанговый зажим. Он представляет собой резьбовое соединение с разрезной конусообразной втулкой. Цанга надевается на вал, далее устанавливается зажимная втулка, пропеллер и шайба. Вся конструкция фиксируется гайкой особой формы – коком.
Если ротор бесколлекторного двигателя находится снаружи (моторы класса Outrunner), то на его верхней поверхности обычно имеется несколько резьбовых отверстий для установки различных переходников и креплений.
У производителей готовых коптеров с бесколлекторными моторами очень популярен вариант с самозатягивающимися гайками от компании DJI. У таких двигателей вал заканчивается резьбой, противоположной направлению вращения ротора.
Механические проблемы
Попробуйте заармить дрон (запустить двигатели) и дать небольшой газ. Без пропеллеров, конечно же.
Теперь слушайте, как они работают — есть ли посторонний шум, скрежет, вибрации или подергивания. Скорее всего, мотор будет дергаться или вибрировать. Для исправления можно попробовать следующее:
- проблему может исправить монтаж полетного контроллера на мягкие подушки (силиконовые);
- если вы используете режим обновления 32К/32К, попробуйте вернуться на 8К/8К, так как на 32К гироскоп намного чувствительнее;
- попробуйте уменьшить значение фильтра гироскопа «low pass filter frequency» (это фильтр низких частот);
Если проблему не удалось устранить, почитайте эту статью, возможно, она вам поможет.
Если ваш квадрокоптер до этой проблемы летал нормально, то, скорее всего, дело в механическом повреждении одного из компонентов. Это также может привести к вопросу, почему переворачивается квадрокоптер.
На двигателе могут отвалиться магниты, вал, может рассыпаться подшипник или оплавиться эмаль на обмотке. Все это выводит из строя двигатель. Из-за магнита и подшипника заклинет, из-за вала может вылететь колокол или зацепится магнит — тоже заклинет. А оплавленная эмаль вызовет короткое замыкание — мотор сгорит.
От перегрева, а также от механических ударов могут выйти из строя регуляторы оборотов, так как это довольно сложная электроника, основанная на «ключах», и выход из строя одного из компонентов регулятора нарушит работу всей платы, а та в свою очередь — работу двигателя.
Если после калибровки акселерометра нет никакого эффекта и модель квадрокоптера по-прежнему не понимает, в каком она положении — у вас проблемы с датчиком, его нужно либо поменять (если вам повезло и вы специалист по ремонту электроники), либо заменить полетный контроллер.
Если во вкладке Setup моделька постоянно крутится и ведет себя неадекватно, то есть проблемы с гироскопом. Для проверки попробуйте отсоединить питание и снова включить — после каждого включения гироскоп проходит калибровку. Если это не помогло, то выход только в замене полетного контроллера.
Возможно, вам поможет статья: Не запускается квадрокоптер? Исправляем проблемы
Статья написана на основе.
Подключение через wifi
Предусмотрены три варианта, как подключить квадрокоптер к телефону:
Если есть возможность подсоединиться к пульту, — это самый простой вариант. Желательно им и воспользоваться. В пульте установлен более мощный приемник, с радиусом действия до 3 км (как DJI Mavic Mini). Если же подключить Wi-Fi к дрону через мобилку, девайс может отдалиться максимум на 30-50 метров. Сами понимаете, разница очевидна.
Для тех, кто интересуется, как работает Wi-Fi коннект: оба девайса объединяются в общую локальную сеть, где телефон передает данные по управлению дроном, а квадрокоптер принимает и мгновенно отзывается на них. В свою очередь, на мобильном видно, что снимает камера девайса.
Такая система контроля подойдет как для тех, кто только учится управлять квадрокоптерами (часто в дешевых моделях нет пульта). И для тех, кто хочет улучшить опыт съемок.
Продвинутые мобильные приложения для квадрокоптеров расскажут о погоде, силе ветра, разрешенных и запрещенных зонах для съемки и т.д.
Чем дальше будет улетать дрон, тем больше будет задержка между командой и движением летающего девайса. К примеру, улетев на 50 метров, бюджетная модель будет показывать изображение с задержкой в 2-3 секунды. Особенно остро эти цифры чувствуются в городской среде.
В тему: ТОП-3 лучших производителей дронов — рейтинг производителей квадрокоптеров
Проверьте пропеллеры
Правильно ли установлены пропеллеры? Квадрокоптер — это рама и 4 двигателя, от слова КВАДРО. Для правильного полета 2 двигателя должны крутиться по часовой стрелке и 2 против часовой.
Для удобного восприятия — просто запомните, что двигатели крутятся «внутрь» дрона.
На изображении выше хорошо видно кромку лопасти, которая будет цепляться за воздух.
Всегда снимайте пропеллеры, когда выполняете ремонт или настройку квадрокоптера, и не ставьте их, пока он не будет готов к полету.
Это очень важное правило, может что-нибудь замкнуть или вы случайно своими действиями включите газ — пропеллеры вас достаточно сильно поранят. Несколько тысяч оборотов в минуту в любом случае нанесут травму.
Лопасти пропеллеров могут не только вас порезать, но и замкнуть/перерезать электронику. Как правило, если производится какой-то ремонт на дроне, то со всех сторон начинают торчать провода и прочая электроника, чтобы был доступ к нужному месту.
Снимайте пропеллеры!
Подключите квадрокоптер к Betaflight Configurator, перейдите во вкладку Setup, там вы увидите 3D-модель дрона. Подвигайте во все стороны дрон (который у вас на столе), он должен полностью повторять ваши движения. Если вы наклонили нос вниз, то моделька тоже должна наклониться стрелкой вниз.
Если вы наклонили дрон носом вниз, а моделька наклонилась вправо, значит, вам нужно внести корректировки во вкладке Configuration, в блоке меню «Board and Sensor Alignment». Как правило, проблемы такого характера бывают с осью вращения. Там нужно будет выставить значение в градусах, например, 170 (число рандомное, все зависит от того, как будет вести себя моделька по отношению к реальному квадрокотперу).
Проверить нужно следующее:
- все ли двигатели работают;
- в правильном ли направлении они крутятся;
- нет ли механических повреждений.
Подключите аккумулятор, запустите Betaflight configurator и перейдите во вкладку Motor. Поставьте флажок в положение «I understand» (я понимаю). Теперь по одному ползунку поднимайте вверх и смотрите, в какую сторону крутится мотор, схема вращения будет на той же странице. Не нужно сильно раскручивать моторы, без пропеллеров это им только вредит.
Если один из двигателей не реагирует или дергается, проверьте качество пайки от полетного контроллера до ESC (регуляторы оборотов) и от ESC до моторов.
Для более простого определения, в какую сторону вращается мотор, на него можно положить пропеллер (на вал), но не закручивать!
Просто необходимая вещь для гоночного квадрокоптера (да и для съемочного тоже), используется в основном для поиска после падения, своим сильным писком поможет найти дрон даже в густой траве. Также пищалка может издавать сигналы при неисправностях, готовности к взлету, низком заряде аккумулятора и так далее.
Несмотря на понятную принципиальную схему, вряд ли современные квадрокоптеры можно считать простыми устройствами. Даже самый недорогой беспилотник оснащается полетным контроллером и гироскопом. Продвинутые модели имеют на борту десятки датчиков, сенсоров, а сбором и анализом информации занимаются миниатюрные компьютеры.
И все же, если летательный аппарат вдруг начинает тянуть в сторону, или он не способен взлететь, то вряд ли причину стоит искать в электронике. Обычно поломка квадрокоптера заключается совсем не в этом.
Управление движением происходит следующим образом:
- Ускорение скорости вращения пропеллеров приводит к подъему аппарата
- Ускорение скорости вращения винтов с одной стороны и замедление с другой позволяет аппарату двигаться в сторону
- Ускорение винтов, вращающихся по часовой стрелке и одновременное замедление винтов, вращающихся против часовой, приводит к повороту квадрика
- Замедление всех винтов позволяет приземлить дрон на землю
Взлетает и летит коптер благодаря силе тяги двигателей. Стабильное положение в воздухе обеспечивается установленным на борту дрона гироскопом. Как видим, основные принципы управления довольно просты. И если, например, после команды на взлет, у коптера не получается приподняться, то проблема или в винтах, или в моторах. Другие компоненты выходят из строя заметно реже.
Современные бесколлекторные движки весьма надежны, поэтому, скорее всего, что-то не так с пропеллерами. О коллекторных двигателях этого сказать нельзя, и проверять в недорогих дронах нужно не только винты, но и моторы, тоже способные стать источником проблем.
В отличие от самолетов или вертолетов, любительские квадры не только проще в управлении, но и зачастую проще в ремонте. Более того, в некоторых ситуациях ремонт вовсе не нужен.
Конечно, охватить все существующие неполадки квадрокоптеров вряд ли возможно. Все модели разные, и, хотя их и объединяют общие принципы работы, однако электронная начинка, интеллектуальные режимы, настройки управления отличаются порой кардинально. Но можно дать некоторые общие рекомендации.
Типичная проблема, с которой сталкиваются новички – коптер не взлетает, хотя винты исправно вращаются на увеличенной мощности. Скорее всего, дело в неправильно установленных пропеллерах.
Понять, как правильно установить винты на квадрокоптер, очень легко. Проверьте маркировку, нанесенную на них, а также маркировку на лучах. Они должны совпадать. Скорее всего, пропеллер, который должен вращаться по часовой, был поставлен на двигатель, вращающийся против часовой стрелки (или наоборот).
В результате, направление вращения винтов оказалось неверным. Из-за этого дрон не способен взлететь. Прежде чем что-то разбирать или относить коптер в ремонт, еще раз проверьте правильность установки винтов.
Более сложной, но не безнадежной, является ситуация, в которой при запуске беспилотника один или несколько моторов не включаются. Обычно такая ситуация характерна для коллекторных двигателей, не отличающихся высокой надежностью.
Впрочем, может быть дело не в движке, а в банальном обрыве провода или в плохом контакте. Провода нередко рвутся после неудачных приземлений, тогда как контакты могут окислиться под воздействием влаги.
Внимательно осмотрите неработающий двигатель и провод, идущий к нему. Если визуально неисправности не обнаружены, можно прозвонить электроцепь движка. Если и прозвон ничего не дал, тогда нужно проверять сам электродвигатель. Возможно, имело место короткое замыкание, либо же обрыв случился внутри корпуса. Сгоревший двигатель иногда можно опознать визуально.
В случае с бесколлекторными двигателями поломка может объясняться неисправностью электроники. Если не запускается бесколлекторный движок, то, скорее всего, из строя вышел электронный регулятор скорости (ESC). Подключите к исправному мотору тот ESC, который необходимо проверить.
Появление посторонних шумов при запуске движков может являться признаком неисправности. Вполне может быть, что шумы генерируются не самими моторами, а погнутыми или деформированными винтами. Проблема легко решается осмотром и ремонтом пропеллеров, либо же их заменой.
Поставьте коптер на ровную поверхность и внимательно присмотритесь к пропеллерам. Если один или несколько винтов являются выпуклыми, скорее всего, именно они являются источником шума. Искривление поверхности пропеллера приводит к уменьшению подъемной тяги, ведь скорость винта снижается.
Хуже, если шум издают двигатели. Это может говорить о том, что поломка скрыта внутри корпуса мотора. В таком случае ремонт квадрокоптера будет заключаться в проверке и замене движков.
Отсутствие реакции на команды зачастую объясняется тем, что в пульте дистанционного управления сели батарейки или разрядился аккумулятор.
Если сигнальный индикатор на аппаратуре не загорается, то с высокой долей вероятности все дело в севших батарейках. Соответственно, никакой ремонт проводить не нужно. Достаточно вставить свежие элементы питания.
Бывает и так, что пилот неверно выполняет последовательность действий, соединяя коптер с пультом. В инструкции обычно подробно расписываются шаги, которые необходимо совершить, чтобы инициализировать беспилотник. Иногда причиной отсутствия реакции на команды является неверное положение дрона (аппарат перевернут или лежит на боку). Некоторые модели дронов не реагируют на пульт до тех пор, пока не будут установлены на горизонтальную плоскость.
Если замена батареек и правильно проведенная процедура инициализации ничего не дали, то проблему следует искать в проводах и контактах, иными словами, внутри пульта. Возможно, все дело в окислившихся батарейках. В таком случае нужно их заменить и протереть контакты.
Проверьте схему двигателей (mixer)
Перед этой проверкой снимите пропеллеры!
Если у вас переворачивается квадрокоптер, откройте Betaflight и подключите аккумулятор к дрону, затем перейдите во вкладку Motors и проверьте направление каждого двигателя в соответствии со схемой. На глаз вы навряд ли сможете определить направление, так как мотор будет слишком быстро крутиться даже на малых оборотах, поэтому используйте палец. Слегка дотроньтесь до мотора и вы поймете, в какую сторону он крутится.
Если по схеме выяснилось, что мотор крутится не в ту сторону, есть два способа это исправить:
- перепаять провода
- зайти в BL_heli и сделать реверс.
Снова зайдите в Betaflight во вкладку Setup, там будет 3D-модель вашего дрона. Возьмите его в руки и подвигайте, модель должна четко повторять ваши действия. Если вы наклоняете вперед, а моделька наклоняется вправо, то вам нужно скорректировать направление.
Также нужно откалибровать акселерометр. Перейдите во вкладку Setup, там будет кнопка Calibrate. Установите дрон на ровную поверхность и нажмите кнопку. Возможно, датчик был не откалиброван и обманывал полетный контроллер, и последний пытался это исправить.
Во вкладке Setup будет блок для выбора схемы двигателей. Если у вас 4 двигателя, то должна быть выбрана схема Quad X.
Перед тем, как прикрепить моторы к раме, измерьте длину винтов. Слишком длинные могут повредить обмотку мотора, что приведет к короткому замыканию, да и просто испортит двигатель.
Сгоревшим мотором дело может не обойтись. Если вы еще не в курсе — карбон (материал, из которого сделана рама) токопроводящий материал, и если винт замкнет на проводку, то сгорит и вся остальная электроника, которая касается рамы.
Вот инструкция, как этого добиться при использовании Baseflight / Cleanflight или Betaflight
- Снимаем винты
- Меняем направление вращения в регуляторах через BLHeliSuite
- Переходим в консоль Betaflight CLI и пишем:
Ставим винты в обратном порядке, CW вместо CCW и наоборот. Не нужно переворачивать винты! 🙂
После обновления прошивок каждый раз убеждаемся, что у нас всё настроено как надо.
Размер рамы и пропеллера
От размера и конфигурации рамы зависит то, сколько двигателей тебе придётся поставить, и на сколько большую диагональ пропеллеров ты сможешь использовать. Сейчас не буду вдаваться в подробности конфигурации, и рассказывать о том, как правильно подобрать раму. Просто напомню, что это ответственный узел, и на нём будет держаться всё, в том числе и тяжёлые, вибрирующие двигатели.
Запомни три простых правила.
- Тут важно не промахнуться с размером. Пропеллеры не должны наслаиваться. Проблемы доставляет и путаница с размерами. Добро пожаловать в мир дюймов
- Жёсткость рамы и её вес очень важны. Если есть возможность, то бери с запасом по прочности. Очень хорошо тебя показывают композитные материалы (карбоновая рама – предел мечтаний)
- Резьбы в пластике или вообще не могут считаться за резьбы, или являются одноразовыми. Ищи или металлические вставки, или думай, как ещё зафиксировать болты
От размера лопастей зависит поведение дрона в воздухе. Большая диагональ даст большую подъёмную силу и устойчивость, в ущерб маневренности, и наоборот. Здесь надо отталкиваться от своей цели. Так же нужно учитывать то, что пропеллер создаёт нагрузку на двигатель. Обычно рекомендованный размер будет указан в спецификации.
Расчёт коптера-ликбез — wiki о коптерах
методика расчёта предложена Книжниковым ВВ
полётная масса
Эмпирика прикидки максимальной массы мультироторных коптеров от габаритов платформы или длины диагонали между моторами при условии максимально вписанных винтов—– масса в кг равна десять умножить на диагональ в метрах в квадрате—–м=10d2—-
например при диагонали 32 см или 0.32 метра получаем 10 х (0.32)х0.32=10х0.1=1 кг типично для 8 дюймовых вмг. При диагонали в 1 метр получим 10 кг приемлимой максимальной полетной массы!
можно решить и обратную задачу——заказчик просит спроектировать мультиротарную платформу на 10 кг полезной нагрузки——значит масса полётная будет 4х10 кг =40кг , тогда сразу прикидываем что размер диагонали равен корень квадратный из 40/10 или корень из 4 и получаем 2 метров!
Академический метод расчета мощности электро вмг по тяге в режиме висения в полгаза —-
1) желаемая тяга в ньютонах делить на ометаемую площадь винта в метрах квадратных—нагрузка в паскалях!
например хочу получить 500 г силы = 5 н тяги на стопе с винта диаметром 10 дюйм или 5 дм2 =0.05 м2—–получаем нагрузку 5н/ 0.05м2=100 н/м2!
2) корень квадратный из соотношения нагрузки к плотности среды—это скорость потока метры в секунду в плоскости винта!
корень квадратный из соотношения 100 н/м2 /1.23 кг/м3=( 81)0.5=9 м/с!!!
3) потребляемая электро мощность на среднем газу в ваттах с учётом кпд вмг —-это произведение тяги на скорость делённое на кпд электро-вмг!
потребляемая моща равна 5 н х 9 м/с / 0.66=67.5 ватт—–это эквивалентно мотору массой 65-70 грамм в полгаза!
4) для режима статики удобно применять эмпирическое выражение зависимости геометрии двухлопастного винта и размеров статора многополюсного бк электромотора как произведение диаметра на шаг пропеллера в см эквивалентна произведению диаметра на длину статора в мм D(см)хH(см)=d(мм)хl(мм)—- например 25,2см х12,6см=318=22мм х14.4мм
эффективность по тяге при висении
эмпирическая зависимость для модельных размеров пропеллеров мультироторов в полгаза, диаметр винта в дюймах приблизительно равен оптимальной удельной тяге электро-вмг например
3дюйм=3 грамм на ватт----4д=4г/вт----5д=5г/ вт----6д=6 г/вт и так далее вплоть до 15дюйм!
Обычно наибольшую эффективность по удельной тяге показывают двухлопастные пропеллеры—-но при ограничении габарита по диаметру из-за конструктива используют трёх и четырех лопастные для повышения тяговооруженности при том же моторе и акку!
Также многолопастные винты лучше работают в турболизированом потоке от ветра в приземленном слое—по причине
меньшей паразитной пульсации давления при проходе лопастями секторов ометания в косом потоке и пересечении луча!
Как результат —–меньше трясёт весь аппарат, корректней работает АП и видеокартинка не дерганая!
косой поток
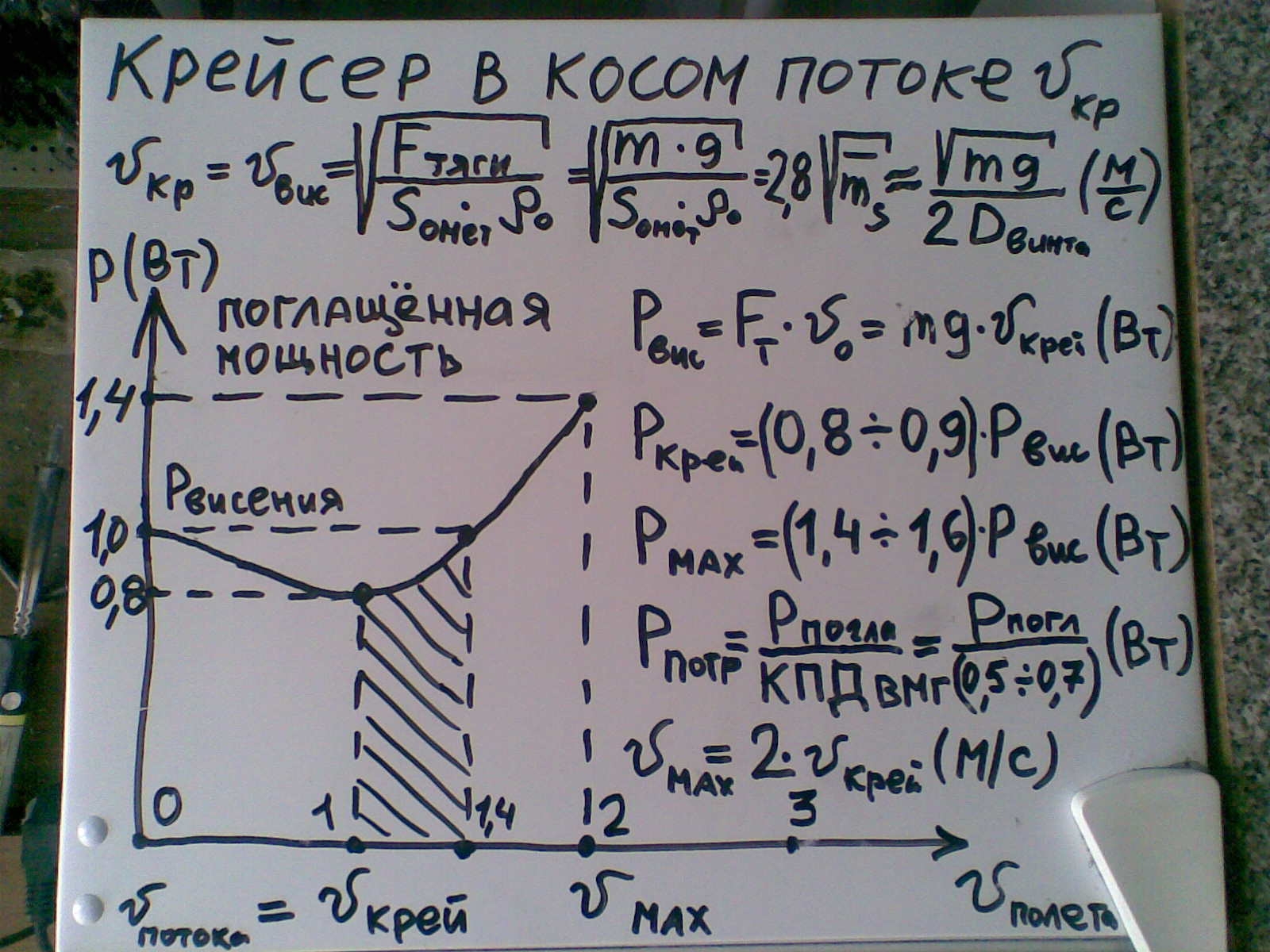
Коптер при движении в горизонте относительно воздуха летит благодаря наклону оси винта от вертикали в направлении полёта —этот режим вызывает косой обдув на плоскость вращения винта——явление очень сложное с точки зрения мгновенного аэродинамического обтекания каждого фрагмента лопасти в зависимости от сектора расположения лопасти!
В классическом одновинтовом вертолёте для адаптации к косому обдуву придумали автомат перекоса угла установки лопастей в зависимости от сектора—-при этом лопасть начинает работать как крыло и частично разгружает мотор по потребляемой мощности в полтора раза правда только в узком диапазоне горизонтальной скорости —-называется крейсер ! В мультироторах винту с фиксированным шагом удаётся адаптироваться благодаря упругому динамическому кручению лопасти из эластичного материала типа термопластика плюс-минус пару градусов—-разгрузка мотора на крейсере около 1.1-1.2 раза относительно режима висения!
минимальная скорость крейсера тождественна скорости потока через винт в режиме висения для квадрокоптера
Vвис=Vкр=(1.1mg )0.5/2D, диапозон крейсерских скоростей коптера любого типа Vкр=(1-1.4)Vвис!!!
Например квадрик полётной массой 800грамм с винтами диаметром 10 дюйм или 0.25 м-----то корень квадратный из 1.1веса в 8.8 ньютон делить на 2х0.25 м ----получаем 2.96/0.5=6 метров в секунду! Тогда поглащённая мощность висения или потока в штиль равна вес 8 н х 6 мвс=48 вт-----потребляемая моща 48 вт делить на кпд вмг 66% или 0.66 равна 72 вт ! В горизонтальном полёте на крейсере около 6 м/с мощность упадет до 0.9 мощности висения или 65 вт, так как
винт в косом потоке начинает работать как крыло в набегающем потоке! А вот при максимальной скорости полёта в два раза выше, чем скорость потока при весении потребляемая мощность вмг вырастет также в 2 раза!
Угол наклона коптера при висении в ветер, то есть неподвижно земле, как раз указывает истинную скорость ветра!
Тогда скорость можно принять как половину от угла наклона или например 0.5 х10 град=5 метров в секунду для большинства мультиротарных коптеров! На практике если наклон при висении более 20 град например на высоте 100 метров и выше, то ветер уже критичный для невозврата против ветра——выход жаться к земле, где ветер слабее 1.5 раза и огородами ползти домой!
Максимальная воздушная горизонтальная скорость коптера эмпирически это произведение шага на частоту—– Vпол=Hf !
Парадокс работы винта в косом потоке для мультироторных платформ заключается в следующем —–максимальная воздушная скорость ла определяется скоростью потока, как произведение геометрического шага винта на частоту вращения и равна именно скорости потока в плоскости винта несмотря на то что ось или вектор тяги не параллелен движению самого коптера по сравнению с самолетом,а развернут под большим углом к горизонтали и почти вертикальный 60-80градусов—-получается что
струя воздуха относительно коптера выворачивается из прямой классической воронки при висении в змееобразную загогулину похожую на раструб саксафона засасывающего набегающий поток с трансформацией скоростей в горизонтальную составляющую!
“10 заповедей” авиаконструктора квадрокоптера(дрон)
1) масса полётная это четыре массы полезного груза mпол=4mгруз, где mрамы авионика =mвмг=mакку=mгруз
2) диагональ между моторами в сантиметрах это корень квадратный из полётной массы дрона в граммах L=(m)0.5
3) удельная тяга винта (грамм/ватт) в режиме висения на полгаза равна диаметру пропеллера в дюймах D(дюйм)=m/Рпот
4) скорость крейсера в горизонтальном полёте равна скорости потока через винт при весении Vкр=Vвис(м/с)=5(m(г))0.5/D(см)
5) мощность потребления вмг при весении равна произведению массы на скорость потока и делить на эффективность вмг с бк моторами Pст=UаккуIст=0.01m(г)Vвис/КПДвмг———где КПДвмг =40% у крошечных квадриков диагональю до 12см,КПДвмг =50% у мелких квадриков диагональю до 25см, КПД=60% у средних коптеров с диагональю до 50см, КПД=70% у больших до 100см, КПД=80% у крупных квадрокоптеров с диагональю свыше 2м
6) напряжение аккумулятора эмпирически корень квадратный из одной десятой полётной массы в граммах Uакку(в)=(0.1m)0.5
7) перегрузка на ла или относительный запас тяги это максимальная тяговооруженность —- Fст(г)/m(г)=Kт=2-4единицы
8) относительный запас скорости полёта это корень степени 0.66 из тяговооруженности Kск=(Тст)2/3——тогда Vмах=VвисKск
9) коэф.полезного действия электро-вмг в горизонтальном полёте на полном газу 50% —–Pпотреб=0.02m(г)Vмах=UаккуIпол
10) произведение диаметра и шага двухлопастного винта в см равно произведению диаметра и длины статора бк в мм DH(см2)=dl(мм2)
более подробно смотри статью “долголёт”

Режимы
Перед запуском обязательно нужно ознакомиться с режимами, которые встроены в ваш дрон.
- Ручной полет. Это самый сложный режим, но в то же время и самый интересный. В нем вы полностью берете управление на себя, а никакая дополнительная стабилизация не работает. Отлично подходит для тех, кто уже немного освоился в управлении и хочет поднять свой уровень мастерства пилотирования и научиться исполнять трюки.
- Стабильный полет. Он рассчитан на съемку фотографий или видео. Выбирая его, в работу вступает встроенный акселерометр, который позволит стабильно удерживать аппарат в воздухе. Этот режим можно назвать режимом для новичков, который идеально подойдет для всех тех, кто только что приобрел оборудование.
- GPS навигация. В этом режиме можно задать маршрут, по которому дрон сделает пролет. Своего рода автопилот и удобная фишка, особенно если вы не хотите контролировать каждый шаг своего БПЛА.
- Управление дроном с телефона. Каждая современная модель квадрокоптера может управляться со смартфона или планшета (причем работает и на Android и на iOS). Дрон ведёт прямую трансляцию картинки, которую захватывает его камера. Ее отображает мобильное устройство, подключенное к коптеру напрямую через WiFi. Очень полезная вещь, рекомендуем!
Советы и типичные ошибки
На первых этапах никогда не запускайте аппарат слишком высоко, особенно в тех ситуациях, когда недалеко от вас находится огромное количество людей. При совершении малейших ошибок техника может не только упасть и сломаться, но также травмировать окружающих людей. Вращающиеся лопасти могут нанести серьезные увечья.
Останавливайте свой выбор на безлюдных местах, желательно не асфальтированных. Таким образом, когда устройство всё-таки упадет, оно не получит сильные повреждения корпуса.
Если вы новичок, никогда не направляйте аппарат сторону рек. Затем, уже после освоения базовых навыков, вы сумеете полноценно пользоваться квадрокоптером над реками, на территории парков и мест, где сосредоточено большое количество людей.
Неопытным пользователям не нужно приобретать дорогостоящие модели. Вне зависимости от аккуратности обучения управлению или места для тренировочных полетов, всё-таки нередко приходится сталкиваться с ситуацией, когда коптеры падают. С другой стороны, техника предлагает широкие возможности для новичков, упрощающих маневрирование в сложных местах – четвертые Фантомы даже анализируют обстановку с помощью бортовых датчиков, предотвращая столкновения.
Перед тем как начать тренировку, заранее убедитесь в том, что аккумуляторная батарея, установленная на борту, полностью заряжена. Категорически запрещается запуск летательных устройств, в которых заряд батареи составляет не более 50%. Во-первых, тренировка окажется непродолжительной, а во-вторых, при наборе большой высоты устройство может полностью разрядиться ещё в воздухе.
Беспилотник — это устройство с простой схемой управления. Набравшись немного практики, вы сами убедитесь в этом.
Управление дроном с помощью пульта или смартфона на выбор пользователя
Когда коптер подключится к телефону, можно смело приступать к волнующей части работы с дроном — управлением в полете.
Предусмотрены три варианта работы с устройством через мобилку.
1. Использование виртуальных кнопок внутри интерфейса программыМобилка выступает заменой джойстика.2. Настройка режимов полета и тонкие подстройки камерыТелефон заранее программирует автопилот «рейса», где можно проработать часто используемые или сложные полеты.3.
В целом, управление простое. Мобильные геймеры и вовсе будут как в «своей тарелке». Правят дроном так же, как и самолетом на авиасимуляторе. Если пользователь не особо играет в мобильные игры, он овладеет навыком управления коптером за 10-15 минут с помощью понятных подсказок, указанных в приложении по управлению квадрокоптером.
Четыре совета для начинающих.
- Не спешите сразу взимать в небо. Первые несколько полетов лучше провести на высоте 2-3 метра.
- Первые разы лучше запускать дрон подальше от высоток и деревьев — чтобы девайс случайно не врезался в них.
- Если приложение предлагает включить виброотдачу, следует этим воспользоваться. Прочувствуете управление через пульсацию.
- Для съемки в полете на превью выставлять минимальное качество изображения. FullHD видео сохраняется на microSD флешку, а вот «пиксельное» превью уменьшит задержку изображения.
Читайте: 16 уникальных способов применения квадрокоптеров
Шаг. эффективность. тяга
От плотности воздуха/числа оборотов винта/шага/диаметра винта/площади лопастей зависит тяга. Угол атаки напрямую влияет на эффективность работы винта, его определяют по след. формуле: шаг лопости – угол спирали. Эффективность – это связь между выходной и входной мощностью.

Если винты хорошо спроектированы, ваш коэффициент полезного действия будет больше 80% Угол атаки зависит от относительной скорости, посему при разных скоростях двигателей, эффективность пропеллеров будет меняться.
Так же на эффективность влияют края лопастей и несущих винтов, они должны быть максимально гладкими.
Конечно конструкция с переменным шагом была бы идеальной, но это создает дополнительную сложность, поэтому они практически никогда не используются.


