

- Что делать и как исправить, если квадрокоптер при взлете тянет в сторону
- Дрон не может зависать ровно. что делать?
- Почему квадрокоптер тянет в сторону
- «собрать большой коптер ничего о них не зная?» — да ерунда (часть 2)
- Anti gravity gain
- D на roll и pitch (на крен и высоту)
- D-term set point weight
- I на roll (на крен)
- P на pitch (высотa)
- P на roll (крен)
- Yaw (рыскание) и pid
- Yaw i (рыскание i)
- Yaw p (рыскание р)
- Вибрация
- Вопрос: «какие у тебя пиды?» — неправильный вопрос!
- Запуск с наклонной поверхности
- Как провести триммирование для квадрокоптера
- Как работают значения pid, их изменение
- Калибровка акселерометра
- Калибровка компаса
- Когда нужно перенастраивать pid?
- Настройка pid квадрокоптера
- Не все проблемы из-за плохих настроек pid
- Неисправный двигатель
- Несоответствие настроек контроллера
- Нужно ли настраивать pid?
- Погода
- Пропеллеры
- Спешка
- Усиление d
- Усиление i
- Усиление p
- Центр тяжести
- Центр тяжести (cg)
- Электромагнитные помехи
- Энциклопедия технологий и методик – базовые принципы полета квадрокоптера
- Вывод
- Заключение
Что делать и как исправить, если квадрокоптер при взлете тянет в сторону
Если при испытании выяснилось, что дрон тянет в сторону, и летит он неровно, необходимо посадить устройство на землю и провести внимательный физический осмотр. Пошаговый алгоритм предлагается следующий:
- Винты квадрокоптера аккуратно прокручивают пальцами. Если один из пропеллеров вращается медленнее других и с ощутимым усилием, необходимо снять его и посмотреть, нет ли загрязнений на оси двигателя.
- Любой налипший мусор, травинки, шерсть и нитки, из-за которых квадрокоптер тянет в сторону, нужно снять. После этого винт устанавливают обратно, при необходимости заворачивая менее плотно, и еще раз прокручивают пальцами. Если он идет свободно, то, скорее всего, коптер в полете перестанет тянуть в сторону.
- Дрон ставят на ровной поверхности и снова пробуют запустить в воздух. Для старых квадрокоптеров механической чистки обычно оказывается достаточно.
Совет! Если винты дрона недавно приходилось менять, следует еще раз проверить направление вращения купленных пропеллеров и при необходимости переустановить их повторно.
Дрон не может зависать ровно. что делать?
Новые пилоты беспилотных летательных аппаратов достигают точки, когда они могут успешно запустить свой беспилотник и заставить его зависнуть на месте. Они видят в Интернете видео дронов, парящих совершенно неподвижно, не отклоняясь ни в одну сторону, ни в другую, и чувствуют разочарование от того, что их беспилотник не может сделать то же самое.
Существует множество причин, по которым ваш беспилотник может наклоняться в одну сторону. Факторы, которые вызывают наклон дрона, включают поверхность, с которой он запускается, калибровку акселерометра, настройки контроллера, несоосные пропеллеры или, возможно, неисправный двигатель.
Необходимо учитывать несколько факторов, которые могут привести к тому, что ваш беспилотник наклонится в определенном направлении. Эту проблему можно решить, сделав шаг назад и оценив каждый аспект отдельно. Мы собрали краткое изложение общих причин и решений, чтобы как можно скорее поднять вас в воздух.
Почему квадрокоптер тянет в сторону
Ситуация, в которой квадрокоптер кренит набок или не взлетает, очень распространенная проблема. Вызывают неполадку несколько причин:
- Неправильные настройки. Перед отправкой в магазины дроны подготавливают для полета, но в процессе многочисленных транспортировок калибровка может сбиться.
- Слишком туго насажен один из винтов. Если при сборке допущена ошибка, и какой-то пропеллер вращается с большим усилием, нежели остальные, квадрокоптер будет тянуть в сторону.
- На ось двигателя в месте крепления винта намотались нитки, травинки или волосы. Такое часто случается со старыми дронами — сам пропеллер в порядке, но лишние элементы тормозят его вращение.
Еще одна причина, по которой квадрокоптер может тянуть в сторону, это ошибка при самостоятельной замене винта. Хрупкие пропеллеры часто ломаются, для устранения поломки необязательно обращаться к профессионалам — детали стоят дешево и не являются дефицитом.

«собрать большой коптер ничего о них не зная?» — да ерунда (часть 2)
Пришло время рассказать о стабилизации камеры для коптера, а именно про 3-х осевые подвесы, которые я устанавливал на свой гексакоптер.
Как я говорил ранее, собрать коптер вряд ли выйдет дешевле при отсутствии необходимых знаний. Но амбиции делали свое дело и я решил что пора переходить с сервоподвесов на подвес с бесколлекторными моторами. Они у нас появились относительно недавно и на момент сборки их не было не так уж и много. Посути купить готовый подвес можно было примерно за 20 тысяч рублей. Однако я решил что выйдет дешевле сделать его самому.

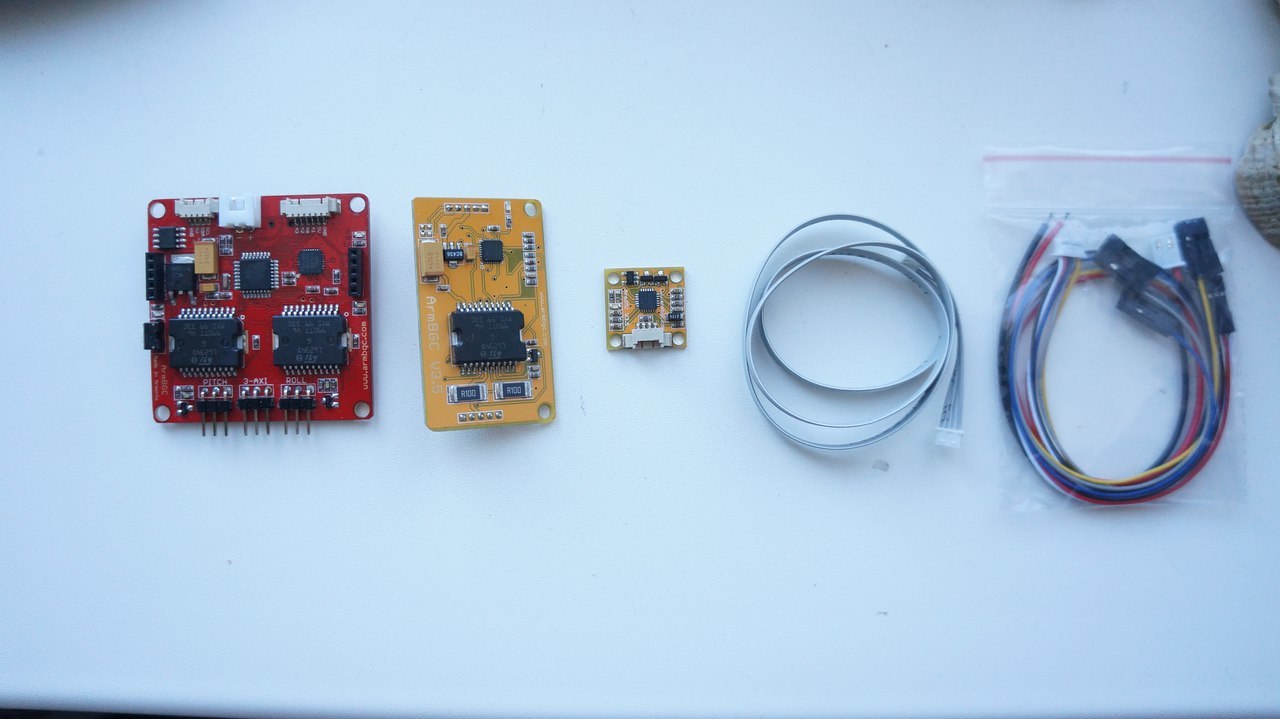
На этот раз я подошел к проекту серьезнее. Спроектировал 3d модель подвеса основываясь на аналогах. Заказал 3 двигателя ipower 4008 150T*, карбоновые пластины* толщиной 2 мм, контроллер для подвеса на сайте ARMBGC (там он был дороже в 2 раза чем в Китае, но знакомый сказал что он чем-то лучше), и плату виброразвязки (не зная какую брать я взял ту, которая подойдет для зеркалки).
Контроллер представлял собой «красную» основную плату, сенсор, и плату 3-й оси, которая крепилась поверх основной платы ( удобно).
Не имея под рукой станка, все детали вырезались вручную. Тут без комментариев, знаю что это идиотизм. И через некоторое время подвес был готов.

Хотелось чтобы подвес вращался на 360 градусов и шасси не мешали при съемках. Тогда я решил приделать «ноги» к 3-й оси, чтобы они вращались вместе с камерой и не попадали в кадр.

Подвес получился нормальный. Камера хорошо балансировалась и пришло время установки электроники.
Не буду долго останавливаться на подключении и настройке контроллера, так как настройка для каждого подвеса индивидуальная. Скажу лишь то, что двигатели по pitchи roll справлялись со своими задачами относительно хорошо, однако, мотор оси yaw просто не вытягивал всю нагрузку при отклонениях больше 20-30 градусов. Поэтому двигатель 4008 был заменен на 5208 180T.

Кроме того «цельные» ноги очень плохо сказывались на оси yaw, так как всей своей плоскостью сопротивлялись воздуху во время полета и не позволяли нормально работать подвесу.
Стало ясно зачем на «коптерах» ноги делают не цельные а «рамчатые»… только тонкий контур самой ноги. Не желая больше ничего выпиливать решил просто их снять и запускать коптер с рук.
В итоге этот подвес отлетал довольно долго.
Кстати, также комплект подвеса включал в себя AV конвертор для камеры sony nex (т. к. в ней нет аналогового видеовыхода) и переключатель режимов съемки (фото, видео) и приемник для управления подвесом.
Для видеопередачи использовался boscam передатчик* на 200 mw

Подвес работал как с 16 мм объективом так и с 16-55… но 50 мм скорее работал для галочки, чем для качества съемки…приходилось сильно стабилизировать программно.
А через некоторое время я решил, что пора покупать другой подвес. Который лучше стабилизирует картинку и чтобы он был легче. Выбор пал на такой 3-х осевой подвес*. Незнакомая мне фирма подвеса «MOY». Ну мой, значит мой))
Плюсы подвеса:
1) Компактный размер.
2) Весит 690 грамм (на 600 легче старого подвеса).
3) Закрытые моторы. Это действительно важный показатель, т. к. пыль и грязь реально ухудшают работу подвеса (сравниваю со старым подвесом с открытыми движками).
4) Контроллер в защитном боксе.
5) Отсутствие «правого рычага» подвеса позволяет легко настраивать камеру.
Минусы подвеса:
1) Аккум больше чем 1000mah не подвесить (просто нет места).
2) Идеален для 16 мм объектива, но для 18-55 не хватает чуть-чуть отверстия в крепежной пластине. В итоге камера сваливается вперед при выдвинутом объективе (когда 55 мм). Однако двигатели все равно вытягивают эту разбалансировку в доказательство чего ниже увидите видео без стабилизации, снятое на 50 мм.
3) Отсутствие «правого рычага» подвеса делает фотоаппарат менее защищенным.
В итоге за сравнительно небольшие деньги и отсутствия проблем получил хороший подвес.
И если со старым подвесом гексакоптер летал как груженая баржа, то теперь она очень быстрая и маневренная.
Видео в реальной скорости 3% стабилизации.
Кстати, пришел подвес довольно быстро (к сожалению ссылку на продавца не дам, т. к. он этот подвес не продает уже) в такой прикольной вот коробке. Почти как айфон. 🙂

Не могу сказать что это подвес «готовый из коробки» т. к. настроен был всего 1 режим follow mode и не сильно хорошо настроен. В результате дополнительно настроил режимы для разных объективов и добавил возможность управления с пульта. На данный момент ожидаю платку для настройки подвеса по Bluetooth*. В результате не придется каждый раз подсоединять провод к контроллеру и подключать к компу. Сразу скажу что заниматься «качественной» настройкой подвеса лучше именно так, потому что пайка usb порта на контроллерах не ахти.
К такому выводу я пришел пока настраивал старый контроллер на старом подвесе. Пока туда-сюда подсоединял шнур, порт отвалился и нечаянно «что-то коротнул». В итоге даже после припайки его обратно компьютер этот контроллер не видел. Причиной этому стал «черный квадратик» на плате. Спасибо продавцу, который согласился бесплатно выслать мне этот квадратик (ведь замена контроллера влетела бы в копеечку). В ремонте мобильников мне его перепаяли за 200р. Вот именно поэтому советую купить такую платку для настройки по Bluetooth, т. к. настройка это дело такое: дома перед зеркалом это работает по одному сценарию, а в полете, когда ориентируешься по горизонту, по-другому.
Сейчас подвес еще не до конца настроен и не требует стабилизации только при полетах в безветренную погоду с 16 мм объективом, и валит горизонт. Решением проблемы завала горизонта (я так понял) является параметр «доверие гирам», но тут тоже нужно знать баланс между качеством и расколбасом моторов. Поэтому на данном этапе не парюсь и жду платку. 🙂
Хочу заметить что в более современных версиях контроллера Bluetooth уже встроенный, поэтому при заказе это уточните.
Ну и, конечно, вывод:
1) Собрать своими силами подвес так же нелегко как и коптер. Кроме того, в данный момент это просто не целесообразно, т. к. их полно в продаже.
2) Если брать подвес, то только с закрытыми моторами, пыль и грязь очень негативно влияют на их работу (тем более случайная металлическая стружка). Кстати в старом варианте подвеса в двигатель оси yaw частенько попадала металлическая стружка… буквально 2-3 частички, пока туда-сюда закручивал болты, разбирал, собирал и т. д. В результате чего эти частички попадали между ротором и статором двигателя и уменьшали его плавность и создавали «треск». Поэтому если у вас на подвесе двигатель как будто «простреливает», то это указывает на «грязь» в моторах.
3) И еще совет не относящийся к подвесу, а относящийся к конвертору для sony nex. В какой-то момент между пилотом и оператором встает вопрос «общения» на расстоянии. Т. е. если оператор стоит на месте взлета коптера, а пилот ушел немного подальше для лучшего визуального контроля за коптером. Для этой цели у нас есть рации. Однако во время работы на частотах в диапазоне 400 мгц этот конвертор начинает чудить. Картинка с фотоаппарата на мониторе делится на 2 части и меняется местами. Долго не могли понять из-за чего такие чудеса, но потом стало ясно, что это из-за раций.
На этом думаю все. Вроде ничего не забыл рассказать. Видео с коптера увидите ниже, а я пошел писать статью про что-нибудь еще)
И напоследок, итоговый список составляющих моего подвеса:
Итого:
300,84$ за неплохой подвес под беззеркалку, сделанный своими руками.
Или можно купить отличный готовый вариант Bluetooth модуль:
Итого:
231,33$
p.s. Спасибо Виктору за этот материал и опыт.
На этом всё, с вами был простой сервис для выбора сложной техники Dronk.Ru
Не забывайте подписываться на наш блог, будет ещё много интересного.
p.p.s. * — ссылки, отмеченные звёздочкой реферальные, так что вы можете дополнительно сэкономить, вернув кешбек до 4%. Подробнее на Dronk.ru/cashback/ или можете получить 6.5%, купив их через кешбек-сервис LetyShops.
Читайте также:
Живучие китайские смартфоны. Часть 1
Живучие китайские смартфоны. Часть 2
5 проекторов для дома
Китайские планшеты с Dual OS, для тех, кто не может сделать выбор
10 гаджетов для гиков с Gearbest со скидкой в честь дня рождения площадки
История Chuwi — от MP3-плееров в 2004 до планшетов на Windows 10 в 2023
Сравним цены на гаджеты предлагаемые GearBest на свой день рождения?

Anti gravity gain
Летите по прямой и дайте пару раз (быстро) газа и посмотрите, сохраняет ли дрон положение. Если он опускается, то увеличьте это значение. Для меня идеальное значение было 3.
D на roll и pitch (на крен и высоту)
Когда вы делаете трюки, такие как сальто и перевороты, вы наверняка замечали своеобразные отскоки в конце. Увеличение D может помочь в уменьшении этой проблемы. Будьте осторожны, так как большие значения D могут начать перегревать двигатели, поэтому регулируйте параметр с умом, ровно до того, чтобы проблемы исчезла, не больше. Также слишком большое значение D будет вызывать колебания и вибрацию в конце этих трюков.
D-term set point weight
Если это значение слишком высокое, дрон будет менее отзывчивым и вести себя будет как робот, т.е. отвечать будет резко. Если значение будет низким, то отвечать на ваши действия будет более гладко и медленно. Я считаю, что хорошим значением будет 0,6.
I на roll (на крен)
Наклоните (в полете, естественно) свой дрон вправо и влево и посмотрите, держит ли он этот наклон после того, как вы отпустили стик (напомню, все манипуляции в АКРО режиме), если он не держит угол наклона, то увеличьте значение I на Roll.
Сделайте тоже самое для наклона вперед и назад. Это также будет зависеть и от силы ветра.
P на pitch (высотa)
Наберите высоту и опустите стик газа до конца вниз, после чего начните набирать газ, обратите внимание на набор высоты. Если квадрокоптер поднимается больше, чем нужно, то вероятно, что Р слишком мал, а если слишком быстрый набор, то Р нужно уменьшить.
Настраивайте до тех пор, пока дрон не станет отзывчивым и проворным с минимальной вибрацией. Также присматривайтесь к двигателям если они дергаются, то это означает, что Р завышен и следует его немного понизить.
P на roll (крен)
С хорошими настройками P квадрокоптер будет очень точно реагировать по крену на положение стика.
Попытайтесь сделать резкий поворот, если Р слишком маленький, то дрон накренится в одну сторону, если слишком большой, вы получите сильную вибрацию и дёрганье. Если Р настроен правильно, то при совершении резких кренов — никаких вибраций и дёрганья не будет.
Yaw (рыскание) и pid
Самая сложная часть для понимания при настройке ПИДов — ось рыскания. Но это также самая легкая часть, потому что вы можете оставить ее по умолчанию в Betaflight, и ваш квадрокоптер будет летать просто отлично.
PID могут помочь с улучшением рыскания дрона, но вы должны учитывать и многие другие факторы, которые могут привести к дестабилизация рыскания.
Одним из симптомов плохого рыскания: вы делаете быстрое рыскание и в этот момент даете резкий газ, а дрон по оси (yaw) рыскания не остается на этом же уровне.
Хорошая работа по этой оси также зависит от качества оборудования: двигателей, пропеллеров и регуляторов оборотов. Ими определяется, на сколько быстро дрон сможет перемещаться по оси рыскания (yaw).
Чтобы улучшить рыскание, вы можете попробовать следующее:
- использование более тяжелых пропеллеров, за счет обратного крутящего момента (можно сравнить с юлой, ее раскрутили и она крутится).
- использование двигателей с более высоким KV
- использование регуляторов оборотов с сильным торможением — если торможение слабое, то тормозящие двигатели не успевают останавливаться с такой же скоростью, как увеличиваются по скорости противоположные двигатели.
- уменьшение дальности расположения двигателей поможет увеличить скорость рыскания, чем короче будут лучи (то, на что крепятся двигатели), тем быстрее будет происходить рыскание.
Yaw i (рыскание i)
Как говорилось выше, I используется для предотвращения дрейфа, но чрезмерное рыскание по I может привести к нестабильности и фактически уменьшить отзывчивость. Yaw I никогда не должен быть выше, чем необходимое значение для предотвращения дрейфа. Если ничего не случилось, просто оставьте значение по умолчанию.
Yaw p (рыскание р)
Yaw PID необходимо настроить отдельно. Значения по умолчанию обычно хорошо работают на всех дронах.
Выполните резкое и быстрое рыскание, если после остановки квадрокоптер дрожит или вибрирует — уменьшите значение Р, если он опустится на одну сторону — увеличьте Р.
Когда Р по рысканию слишком высок, то при рыскании квадрокоптер будет набирать высоту, в таком случае, Р следует уменьшить.
Вибрация
Не все колебания вызваны высоким значением P. Перед настройкой PID вам необходимо максимально устранить источники вибрации на вашем дроне. Например, балансировка двигателей и пропеллеров, жесткость рамы и т. д.
Вопрос: «какие у тебя пиды?» — неправильный вопрос!
Довольно бессмысленно использовать чужие ПИДы на своем квадрокоптере. Каждый дрон уникален, его оборудование, да даже ветер и климат влияют на корректировку PID.
Запуск с наклонной поверхности
Новые пилоты беспилотных летательных аппаратов часто совершают распространенную ошибку, когда берут свой беспилотник в его первый рейс. Они запускают свой беспилотник с неровной поверхности. Это приводит к смещению кардана камеры дрона, из-за чего кажется, что отснятый материал наклоняется в одну сторону.
Как провести триммирование для квадрокоптера
Если квадрокоптер летит в бок, делать нужно в первую очередь проверку его механической исправности. Но когда отладка винтов не дает результатов, и дрон продолжает тянуть в сторону, остается провести автоматическую калибровку устройства. Выполняют ее по такой схеме:
- На пульте управления коптером находят кнопки или колесики, отвечающие за триммирование.
- Дрон запускают в работу и поднимают устройство в воздух отведением левого стика вниз.
- Набирают небольшую высоту и определяют, в какую именно сторону продолжает тянуть неисправный коптер.
- При наличии крена вправо триммируют дрон влево и наоборот.
- Проводят настройку до тех пор, пока устройство не начнет двигаться совершенно ровно.
Если новый квадрокоптер заваливается в сторону при взлете, для начала можно попробовать просто сбросить заводские установки и провести калибровку гироскопа и акселерометра. Для этого аппарат размещают на ровной поверхности, включают и отводят оба стика сначала вниз и влево, а затем вниз и вправо. Об успешно выполненной настройке коптер сообщит светодиодным или звуковым сигналом.

Как работают значения pid, их изменение
Как правило, изменение значений ПИД (усиления) оказывает влияние на поведение квадрокоптера:
Калибровка акселерометра
Предположим, вы обнаружите, что ваш недавно построенный беспилотный летательный аппарат склонен наклоняться в одну сторону, а не в другую. Возможно, возникла проблема с вашей первоначальной калибровкой акселерометра. Калибровка акселерометра вашего дрона не всегда является обязательным шагом, и из-за этого многие новые пилоты упускают этот шаг из виду.
Калибровка компаса
Современные беспилотные летательные аппараты зависят от их инерциального измерительного блока и компаса, работающих в тандеме. Если один из этих блоков неправильно откалиброван или один из этих компонентов неисправен, ваш беспилотный летательный аппарат может неправильно интерпретировать получаемую информацию, что приведет к ее смещению.
Когда нужно перенастраивать pid?
Почти все компоненты квадрокоптера влияют на PID, поэтому когда вы меняете какой-нибудь компонент, проведите и настройку PID. Если в Betaflight и Cleanflight вы меняли Looptime, то тоже нужно будет подкорректировать PID.
Настройка pid квадрокоптера
Перед настройкой:
- Всегда настраивайте свой квадрокоптер в режиме АКРО (ACRO)!
- Убедитесь, что центр тяжести находится прямо посередине, так как центр тяжести оказывает значительное влияние на то, как хорошо будет летать ваш дрон.
Нет правильного или неправильного способа настройки PID, все, что хорошо работает для вас — и есть правильная настройка. PID настраиваются индивидуально под каждого пилота.
Обычно я всегда начинаю летать на стандартных настройках, а настройки в прошивках Betaflight и KISS хорошо работают для большинства квадрокоптеров.
Когда я летаю и замечаю какое-нибудь нежелательное поведение, я настраиваю конкретное значение и снова проверяю в полете. Если у квадрокоптера много вибраций, можно поиграть со значением PID, предварительно уменьшив все значения до половины или более, чтобы убедиться, что они не слишком высоки для начала.
Каждый раз, когда изменяете значения ПИД, задавайтесь вопросом: «Стало лучше или хуже». Найдите значение, на котором характеристика полета будет наилучшей.
За один раз настраивайте одну ось, сначала крен, потом высоту и затем рыскание. На каждой оси я настраиваю одно значение за раз, начиная с коэффициента усиления P, затем усиления D и, наконец I. Также вам нужно будет постоянно возвращаться к тонкой настройке, потому что одно значение может влиять на другое.
Не все проблемы из-за плохих настроек pid
Перед настройкой PID, вы должны изучить и другие данные:
Неисправный двигатель
Неисправный двигатель может быть причиной того, что ваш беспилотник наклоняется в одну сторону. Современный беспилотный летательный аппарат использует четыре мощных двигателя для создания достаточной подъемной силы, чтобы поднять его в воздух. Если один двигатель не работает на пике, это может привести к ненужной нагрузке на остальные три двигателя, что, в свою очередь, может привести к выходу двигателя из строя.
Несоответствие настроек контроллера
Если вы не можете визуально определить проблему вашего дрона, проблема может быть связана с вашим контроллером. Контроллер, у которого неправильно настроены параметры канала тангажа, крена и рыскания, может привести к дрейфу вашего дрона.
Нужно ли настраивать pid?
На сегодня программное обеспечение для квадрокоптеров имеет сложную фильтрацию шумов и оптимизированные алгоритмы для полетов. Квадрокоптер может хорошо летать прямо из коробки на основе стандартных значений PID, если, конечно вы не используете некачественные детали или квадрокоптер очень плохо настроен.
Сделаем вывод, что в эти значения в большинстве своем лезть не требуется, разница будет между «хорошо летающий квадрокоптер» и «идеально летающий квадрокоптер».
Погода
Неблагоприятные погодные условия не позволяют дронам реализовать свой максимальный потенциал. Легкий ветерок может заставить ваш беспилотник слегка дрейфовать, но сильный ветер определенно заставит его двигаться в том направлении, в котором дует ветер.
Пропеллеры
Пропеллеры вашего дрона оказывают нисходящую силу, создающую подъемную силу. Когда эта сила неравномерно распределяется по различным двигателям вашего дрона, создается неравномерный подъем, в результате чего дрон дрейфует в определенном направлении, и иногда это препятствует успешному запуску дрона.
Если это не решит проблему, подумайте о покупке нового набора пропеллеров и начните с нуля, уделяя пристальное внимание ориентации каждого пропеллера и гарантируя, что они направлены правильно вверх.
Спешка
Все приходят в восторг от перспективы полета на своем беспилотнике. В конце концов, это приятное хобби. Пилоты беспилотных летательных аппаратов часто забывают, что после включения дрона ему требуется несколько секунд, чтобы сориентироваться перед запуском.
Усиление d
D работает как демпфер (глушитель, гаситель) и уменьшает чрезмерную коррекцию и регулирование коэффициента P. Увеличивая значение D, вы смягчаете воздействие Р, как бы добавляя «пружину» и также минимизирует вибрацию пропеллеров.
Если D будет слишком маленьким, то дрон будет как бы «отскакивать» назад в конце флипов и кренов, а также у вас будет сильная вибрация, вызванная вертикальным снижением.
Слишком большое значение тоже приводит к вибрациям. В попытке стабилизировать квадркоптер, полетный контроллер будет командовать регуляторам оборотов, чтобы те то прибавляли обороты двигателям, то уменьшали с такой скоростью (в смысле быстрее-медленнее), что из-за этого двигатели перегреются и сгорят. Вибрация также будет действовать на контроллер полета и со временем ситуация будет ухудшаться.
Еще одним побочным эффектом от D является то, что квадрокоптер становится «мягким», то есть реакция на команды слишком вялая.
Усиление i
Значение I определяет, насколько сильно он будет поддерживать квадрокоптер при воздействии внешних факторов, таких как ветер и смещение центра тяжести, например.
Это настройка жесткости при поворотах квадрокоптера.
Обычно, настройки по умолчанию вполне хорошо справляются с этим, но если вы заметили некоторый дрейф дрона без вашей команды, то увеличьте немного значение I. Если значение будет слишком низкое, вам часто придется исправлять траекторию полета дроном, особенно, если вы часто меняете уровень газа.
Если значение I будет слишком высокое, то поведение квадрокоптера будет «деревянным», он будет слабо реагировать на ваши изменения положения стика на пульте. Никакие регуляторы оборотов, двигатели и пропеллеры не одинаковы, каждый на какую-то часть, но работает по-своему, поэтому когда вы даете резкий газ, а потом резко опускаете стик газа, один двигатель будет останавливаться быстрее другого и наоборот, все это вызывает провалы в положении квадрокоптера в воздухе, один двигатель еще имеет тягу, а другой уже нет.
Таким образом, I используется для исправления таких мелких проблем.
Усиление p
P определяет, насколько жестко контроллер полета исправляет погрешности, чтобы достичь желаемой траектории полета. Этот параметр регулирует чувствительность и отзывчивость на изменения положения стиков. Чем выше это число, тем выше чувствительность и отзывчивость.
Более высокий коэффициент Р, означает более четкое управление, в то время как низкий Р — более мягкое и плавное управление. Но если это значение слишком большое, дрон станет слишком чувствительным и начнет сам себя корректировать, а также начнутся колебания значений положения стиков.
Можно снизить P, чтобы уменьшить колебания, но тогда дрон будет нечетко выполнять ваши команды, поэтому нужно будет поиграть с I и D, чтобы это компенсировать.
Центр тяжести
Распределение веса дрона играет решающую роль в обеспечении того, чтобы он летал на одном уровне. Если вес смещен от центра тяжести дрона, он будет наклоняться в этом направлении.
Центр тяжести (cg)
Центр тяжести должен быть ровно посередине, между всеми 4-мя двигателями. Плохая центровка приведет к тому, что одни двигатели будут работать больше, чем другие, отсюда перегрев моторов и плохая стабильность полета. Например, аккумулятор находится в задней части, вместо расположение по-середине и поэтому задние моторы будут работать на 100%, а передние на 80%.
Электромагнитные помехи
Современные дроны используют гироскопические датчики, чтобы поддерживать их на одном уровне. Большие магнитные поля создают помехи в этой системе, которые могут привести к ее хаотичному полету. Одним из наиболее распространенных источников больших электромагнитных полей являются высоковольтные линии электропередачи. Эти огромные сооружения несут множество токов, которые могут повлиять на производительность вашего дрона.
Энциклопедия технологий и методик – базовые принципы полета квадрокоптера
Базовые принципы полета квадрокоптера

Базовые принципы полетов любой техники описывает аэродинамика и квадрокоптеры не являются исключением. Три оси вращения абсолютно однозначно задают ориентацию квадрокоптера в пространстве и направление его полета. Причем направление движения никак не зависит от расположения самого квадрокоптера в воздухе.
Любой летательный аппарат имеет курсовое смещение, что касается даже сверхзвуковых самолетов. А, как известно, вертолеты вообще без проблем могут летать боком.

Три оси или угла полета принято правильно называть тангажом, креном и рысканьем. Разберем их более подробно.
Под тангажом понимают поворот аппарат вокруг продольной оси, рысканием – вокруг вертикальной оси, а креном – продольной оси.
Любой квадрокоптер, как и другой летательный аппарат совершает во время полета строго определенный список маневров. Это движение, тангаж/крен и рыскание – именно они и определяют параметры полета квадрокоптера.
Если брать в рассмотрение вертолет, то его главный винт имеет влияние на тангаж и крен, а хвостовой винт компенсирует вращающий момент и от того, с какой скоростью он вращается и в каком положении находится, зависит рыскание.

В пилотировании квадрокоптера все обстоит иначе. Здесь имеются целых четыре винта, два из которых вращаются по часовой стрелке, а два других в противоположном направлении.
Для большинства квадрокоптеров устанавливают двигатели с неизменным шагом и управление ими заключается в повышении или понижении числа оборотов.
Соответственно если все из винтов квадрокоптера имеют одинаковую скорость вращения, то все параметры будут скомпенсированы. При увеличении скорости вращения одного из винтов квадрокоптера баланс нарушается. При этом, если скорость винта с обратным направлением вращения будет пропорционально уменьшена, то рыскание сохранение нулевого рыскания, но изменится тангаж или крен.
Если же увеличивать обороты одновременно на обоих винтах, которые вращаются в одном направлении и уменьшить на других, ту угол рыскания будет изменен.
Управление двигателями квадрокоптера, а, следовательно, и скоростью вращения его винтов, осуществляется с пульта дистанционного управления, сигнал с которого поступает на бортовой компьютер квадрокоптера и к ним добавляются необходимые коррекции от гироскопа, акселерометра и так далее.
Оси квадрокоптера
Есть много терминов, обозначающих оси и вращающие моменты коптера (и любого другого летающего аппарата). Все многообразие возможных движений коптера мы попытались собрать на одной иллюстрации:

Оси квадрокоптера
Отличную анимацию на эту тему можно посмотреть здесь. Термины для обозначения пришли из авиации.
Throttle — переводится как «дроссель», «тяга» или «газ» в обиходе. В планерах «газ» определяет скорость движения вперед, то есть вектор силы приложен вдоль оси X. В коптерах он управляет подъемом платформы, то есть вдоль оси «Z».
Rudder, или «руль направления». У крылатых аппаратов это часть хвостового оперения, которая позволяет самолету поворачивать. В коптерах этим словом также обозначают управление носом платформы.
Elevator, или «руль высоты». В самолетах также находится в хвосте и позволяет задрать или опустить нос и, тем самым, снизиться или набрать высоту. В коптерах манипуляции с этим моментом силы позволяет коптеру двигаться вперед или назад.
Aileron, или «элероны». Часть конструкции крыла которая позволяет управлять креном самолета. Коптер за счет крена может двигаться боком влево или вправо.
Все эти термины применяются одновременно, но наиболее корректны названия моментов вращения Yaw, Pitch, Roll. Эти обозначения используются при работе с матрицами вращения.
Управление квадрокоптером
Полет контролируется стиками пульта. Выше показано соответствие движений стиков, движениям коптера. Однако важно понимать, как именно достигается движение в том или ином направлении. А происходит это за счет изменения тяги двигателей. Пояснить это проще всего при помощи рисунка:

Управление перемещением квадрокоптера
Структурная схема коптера фактически продиктована особенностями управления полетом. Например, моторы обязательно должны попарно вращаться навстречу друг другу. В противном случае платформа начнет закручиваться. Становится очевидна необходимость использования полетного контроллера. Когда оператор двигает стик газа вверх происходит одновременное увеличение оборотов всех двигателей. Для поворота носа платформы необходимо отклонить один стик горизонтально, а полетный должен увеличить обороты одной пары двигателей и замедлить для второй.
Теоретически можно подключить регуляторы непосредственно к приемнику. Каждый стик будет управлять тягой одного двигателя. Но совершенно невозможно вообразить себе каким мастерством должен обладать оператор совершить какое-нибудь подобие управляемого полета.
Стабилизация полета
Помимо преобразования команд оператора в команды двигателя полетный контроллер стабилизирует полет платформы. Стабилизация необходима по нескольким причинам:
- неидентичность винтомоторных групп (ВМГ)
- неидентичность регуляторов оборотов
- неравномерность распределения нагрузки на двигатели из-за смещения центра тяжести
- «сдувание» ветром
Для компенсации этих воздействий в составе полетного контроллера есть инерциальная измерительная система, которая включает в себя акселерометр, гироскоп, магнитометр и барометр. В более дорогих моделях дополнительно используют GPS-приемники. Даже в те моменты когда оператор пытается просто удерживать коптер на месте полетный контроллер продолжает активно менять двигатель тягу двигателей компенсируя все возможные ускорения и вращения.

При проектировании и создании квадрокоптера следует выполнить все необходимые расчеты с целью нахождения оптимального баланса между массой аппарата, мощностью установленных на него двигателей и целого ряда других факторов.
В квадрокоптере каждый их параметров и характеристик тесно связан друг с другом. Так, например, если вы захотите увеличить полетное время, то нужно будет установить аккумулятор большей емкости, а, следовательно, станет больше и масса, что повлечет увеличение расхода энергии.
Расчет квадрокоптера требует хорошей инженерной подготовки. Если вы хорошо знаете и понимаете каждый из параметров квадрокоптера, то можете попробовать выполнить расчет на онлайн калькуляторе, на сайте ecalc.ch.
Также можно скачать уже готовые расчеты из сети Интернет, и уже базируясь на их данных создать макет собственного квадрокоптера.
Составитель. Патлах В.В.
http://radiocopter.ru
© “Энциклопедия Технологий и Методик” Патлах В.В. 1993-2007 гг.
Вывод
Может быть не только одна конкретная причина, по которой ваш беспилотник наклоняется в одну сторону. Это может быть любая комбинация причин. Технология беспилотных летательных аппаратов быстро развивалась на протяжении многих лет, и появилось множество решений для устранения проблем с оборудованием.
Заключение
Неполадка, когда квадрокоптер тянет в сторону, встречается очень часто, но обычно не свидетельствует о серьезной неисправности. В большинстве случаев крен устраняется калибровкой или механической чисткой аппарата.


, цена 4600 руб")




