

- Fpv rc – пульт для дальних полетов и антенное хозяйство
- Бортовой компьютер и сенсоры
- Безопасность
- Детали и цены
- Моторы и пропеллеры
- Об установке антенн rc и fpv на летающих моделях – где лучше установить антенны на квадрокоптере
- Особенности выбора комплектующих
- Постройка diy квадрокоптера. часть 1 теория
- Теория полета
Fpv rc – пульт для дальних полетов и антенное хозяйство
Если вы увлекаетесь радио моделизмом, то статья может вам показаться интересной. Расскажу о том как я сделал свою “наземную станцию” для дальних полетов с FPV.

Уже не помню сколько было вариантов. Начиналось все с ноутбука, камеры захвата изображения, длинных проводов до машины которая питала все это хозяйство. Просто придти и полетать в поле было нельзя, нужно было тщательно готовиться и проверять по десять раз что бы ничего не забыть. Надоело.
Для полетов без камеры аппаратуре FlySky FS-T6 вполне хватало т.к. когда пропадала видимость самолета с земли тогда начинались проблемы со связью. Перебои начинались уже на 400-500 метрах. Когда была установлена fpv камера проблемы со связью стали сильно досаждать.В начале был куплен Wi-Fi бустер на 2 вата, потом заменен fpv приемник/передатчик с 5.8Ghz 200mWt на 1.2Ghz 600mWt. Но тут начались проблемы с смежными частотами RC управления на 2.4Ghz и fpv 1.2Ghz. Частично они решились переходом на 5 канал видео связи но наводки fpv передатчика заметно снижали дальность. Пришлось изобретать направленные антенны: Патч на 1.2Ghz и бабочка на 2.4Ghz. Обо всем по порядку.
Аппаратура FS-T6 имеет отсек для пальчиковых батареек. Серьезную нагрузку пальчики не выдержат. В отсек хорошо поместился Li-Po аккумулятор 1500mA/h 11.1v которого вполне хватает на несколько долгих полетов. Пришлось сделать пару отверстий для креплений и притянуть его стяжками. Питающий провод был подпаян к клеммам аппаратуры. За одно был выведен из корпуса провод питания от выключателя. Таким образом я могу при включении аппаратуры сразу подавать питание на все дополнительные потребители. Удобно!

Пока разобранный передатчик не был обратно собран нужно сделать еще одну штуку – выкинуть штатную антенну-сосиску, рассверлить отверстие где была старая антенна, поставить в нее купленный высокочастотный разъем “папа” и подпоять его к передатчику. После сборки будет выглядеть так:

Пульт был закреплен на куске винилового сайдинга 4-я стяжками. Далее было насверлено множество отверстий для крепления компонентов:
- приемник 5.8ghz
- приемник 1.2Ghz
- wi-fi бустер 2.4Ghz
- кастом преобразователь 12v – 5v (для питания бустера)
- 5” дисплей для аналогового сигнала
- площадка для крепления антенн
При подключении никаких хитростей нет. Нужно только прикупить 3 высокочастотных переходника-удлинителя типа мама-мама для подключения передающего сигнала от пульта к бустеру и от бустера к антенне; от fpv приемника к антенне.
К слову сказать, если вы любите летать вокруг себя, то направленная антенна вам не нужна. Летайте на штатных “сосисках” или “клеверах”. Они дают ровный сигнал во все стороны и не придется вертеться в след за самолетом, но дальность приема сильно упадет.
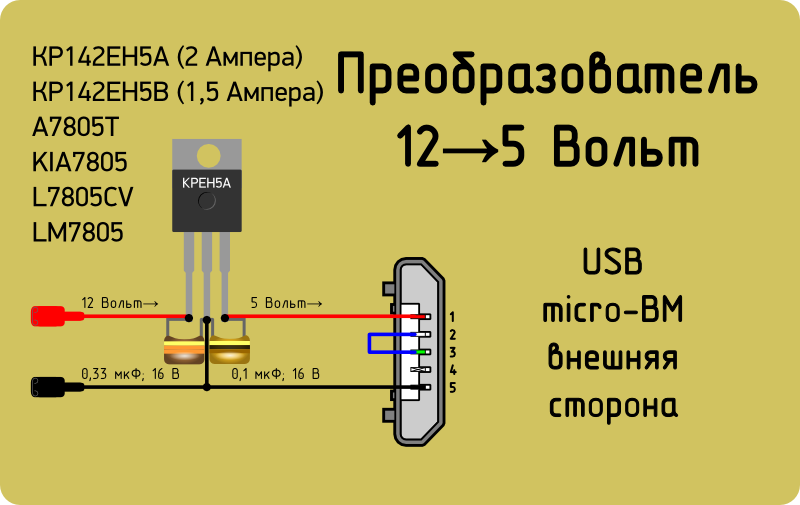
Купленный мною бустер оказался с питанием от 5 вольт.

Подключать напрямую к 12 вольтам не хотелось. Пришлось изобретать преобразователь.

Преобразователь собран на микросхеме KP142EH5A и посажен на радиатор. Схема преобразователя очень проста:
Видео приемники подключены к дисплею одновременно. Оказалось очень удобно т.к. дисплей имел два входа. Переключениями между входами штатно осуществляется нажатием кнопки V1/V2 на самом дисплее.

Антенное хозяйство выполнено на куске одностороннего текстолита. Обклеяно скотчем, что бы не ржавело. Можно было и покрасить…

Направленная патч антенна на 1.Ghz с высоким коэффициентом усиления выполнялась по этой схеме:
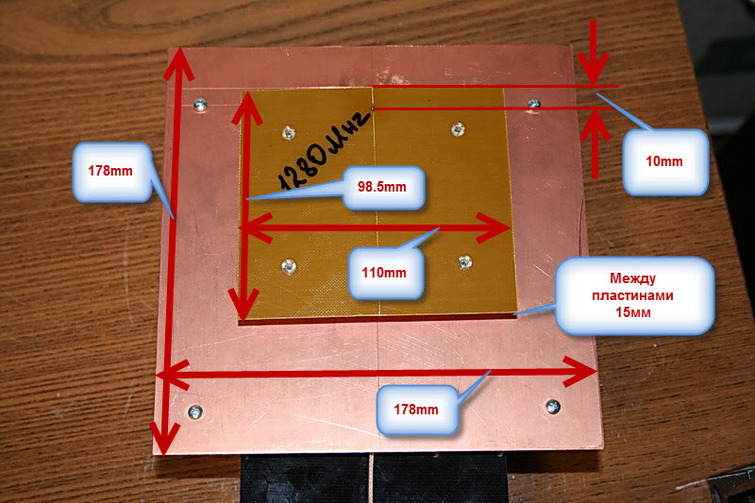
Расстояние между пластинами 11.6мм. Перемычки из диэлектрика. На задней стороне припаян высокочастотный разъем “папа”.

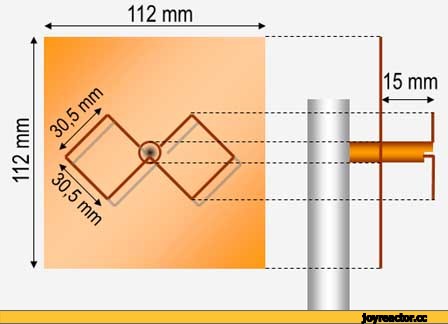
Широкополосная направленная антенна бабочка для wi-fi делалась по схеме:

Конструкция получилась увесистая (можно ею отбиваться в подворотне), но напряжения при удержании руках не испытываю. Всегда можно накинуть шнурок на проушину аппаратуры.
Бортовой компьютер и сенсоры
Выбор полетных контроллеров для коптеров очень велик — начиная от простого и дешевого KapteinKUK и нескольких open source проектов под Arduino-совместимые контроллеры до дорогого коммерческого DJI Wookong. Если ты настоящий хакер, то закрытые контроллеры тебя не должны сильно интересовать, в то время как открытые проекты, да еще и основанные на популярной ардуинке, привлекут многих программистов. О возможностях любого полетного контроллера можно судить по используемым в нем датчикам:
• гироскоп позволяет удерживать коптер под определенным углом и стоит во всех контроллерах; • акселерометр помогает определить положение коптера относительно земли и выравнивает его параллельно горизонту (комфортный полет); • барометр дает возможность удерживать аппарат на определенной высоте.
На показания этого датчика очень сильно влияют потоки воздуха от пропеллеров, поэтому стоит прятать его под кусок поролона или губки; • компас и GPS вместе добавляют такие функции, как удержание курса, удержание позиции, возврат на точку старта и выполнение маршрутных заданий (автономный полет).
К установке компаса стоит подойти внимательно, так как на его показания сильно влияют расположенные рядом металлические объекты или силовые провода, из-за чего «мозги» не смогут определить верное направление движения; • сонар или УЗ-дальномер используется для более точного удержания высоты и автономной посадки; • оптический сенсор от мышки используется для удержания позиции на малых высотах; • датчики тока определяют оставшийся заряд аккумулятора и могут активировать функции возврата на точку старта или приземление.
Сейчас существует три основных открытых проекта: MultiWii, ArduCopter и его портированная версия MegaPirateNG. MultiWii самый простой из них, для запуска требует Arduino с процессором 328p, 32u4 или 1280/2560 и хотя бы одним датчиком-гироскопом. ArduCopter — проект, напичканный всевозможным функционалом от простого висения до выполнения сложных маршрутных заданий, но требует особого железа, основанного на двух чипах ATmega.
MegaPirateNG — это клон ArduCopter, который способен запускаться на обычной ардуине с чипом 2560 и минимальным набором датчиков из гироскопа, акселерометра, барометра и компаса. Поддерживает все те же возможности, что и оригинал, но всегда догоняет в развитии.

канальный пульт
С железом для открытых проектов аналогичная ситуация, как и с рамами для коптера, то есть ты можешь купить готовый контроллер или собрать его самостоятельно с нуля или на основе Arduino. Перед покупкой стоит всегда обращать внимание на используемые в плате датчики, так как развитие технологий не стоит на месте, а старье китайцам как-то надо распродать, к тому же не все сенсоры могут поддерживаться открытыми прошивками.
Наконец, стоит упомянуть еще один компьютер — PX4, отличающийся от клонов Arduino тем, что у него есть UNIX-подобная операционная система реального времени, с шеллом, процессами и всеми делами. Но надо предупредить, что PX4 — платформа новая и довольно сырая. Сразу после сборки не полетит.
Настройка полетных параметров, как и программы настройки, очень индивидуальна для каждого проекта, а теория по ней могла бы занять еще одну статью, поэтому вкратце: почти все прошивки для мультикоптеров основаны на PID-регуляторе, и основной параметр, требующий вмешательства, — пропорциональная составляющая, обозначаемая как P или rateP.
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета. Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах. Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение. Настрой и заранее проверь функцию fail safe твоего полетного контроллера, которая поможет приземлиться или вернуть коптер на точку старта при потере сигнала с пульта.
Детали и цены
Самое важное и минимальное что потребуется для сборки с нуля (первым в списке идет то, что использовал я, затем то что используют многие другие):
| Сам квадрокоптер | ||
|---|---|---|
| Моторы: 4 штуки лучше брать на 1 больше, пригодится | hacker Style Brushless Outrunner 20-22L 924kv | $12.88 |
| hexTronik DT700 Brushless Outrunner 700kv | $10.95 | |
| 2213N 800Kv Brushless Motor | $7.36 | |
| Пропеллеры: минимум 2 стандартных и 2 обратного вращения в начале попыток и испытаний это будет главных расходный материал, поэтому берите сразу много, заодно часть из них будет бракованное и не пригодное для использования | 10X6 Propellers (5шт) 10X6R Propellers (5шт) | $2.40 $3.04 |
| APC 10×4.7 counter rotating propellers set | $8.50 | |
| Регуляторы скорости: 4 штуки покупать надо как и моторы с запасом, может быть брак или случайно сгорит и потом месяц ждать новый | HobbyKing 30A BlueSeries Brushless Speed Controller они же Mystery 30A BlueSeries | $10.47 $13.96 |
| TURNIGY Plush 25amp Speed Controller | $11.81 | |
| Источник питания с увеличением емкости растет и вес, а значит моторы будет больше потреблять, поэтому нет особого смысла брать супер емкий аккумулятор, лучше взять 2-3 мелких и менять их | Turnigy 2200mAh 3S 30C Lipo | $13.79 |
| ZIPPY Flightmax 2800mAh 3S1P 30C | $17.76 | |
| Рама стараемся делать максимально легкой и прочной | 4 алюминиевые трубки или профиль 10х10 и кусок фанерки | разобрать алюминиевый штатив |
| HobbyKing Quadcopter Frame V1 | $14.99 | |
| Мозги и датчики | ||
| Программируемый микроконтроллер | Seeeduino Mega | $43.00 |
| Arduino Mega | $64.90 | |
| Датчики рекомендую сразу брать AllInOne или FFIMU платку, так как остальные датчики очень сильно пригодятся потом | гироскоп ITG3205 акселерометр BMA020 | WMP$7.98 BMA020 230руб |
| All In One (гироскоп ITG3200, акселерометр BMA180, барометр BMP085, магнитометр HMC5883L) | $99.80 | |
| FreeFlight IMU 1.22L | €84.00 | |
| Аппаратура управления и зарядное устройство | ||
| Аппаратура управления минимум 4 канала | Hobby King 2.4Ghz 4Ch Tx & Rx V2 (Mode 2) | $22.99 |
| Turnigy 9X 9Ch (Mode 2) | $53.79 | |
| Аккумулятор к аппаратуре | Mystery 11.1V 2200mAh | $12.72 |
| AA 600mAH Ni-MH Battery Set (8pc) | $1.99 | |
| Зарядное устройство | iMAX B6 2.5″ LCD RC Lipo Battery Balance Charger | $36.50 |
| Turnigy Accucel-6 50W 6A Balancer/Charger | $22.99 | |
| Другое | ||
| так же потребуются проводочки, болтики, винтики, стяжки, дрель, паяльник с паяльными принадлежностями и более-менее прямые руки | ||
| ИТОГО примерно от 220$ | ||
Моторы и пропеллеры
Из-за вращения моторов в разные стороны приходится использовать разнонаправленные пропеллеры: прямого вращения (против часовой) и обратного вращения (по часовой). Обычно используются двухлопастные пропеллеры, их легче балансировать и найти магазинах, в то время как трехлопастные дадут больше тяги при меньшем диаметре винта, но доставят много головной боли при балансировке.
Плохой (дешевый и неотбалансированный) пропеллер может развалиться в полете или вызвать сильные вибрации, которые передадутся на датчики полетного контроллера. Это приведет к серьезным проблемам со стабилизацией и вызовет сильное смазывание и «желе» на видео, если ты снимаешь что-то с коптера или летаешь с видом от первого лица.

он же ESC
У любого пропеллера есть два основных параметра: диаметр и шаг. Их обозначают по-разному: 10 × 4.5, 10 × 45 или просто 1045. Это означает, что диаметр пропеллера 10 дюймов, а его шаг 4,5 дюйма. Чем длиннее пропеллер и больше шаг, тем большую тягу он сможет создавать, но при этом повысится нагрузка на мотор и увеличится потребление тока, в результате он может сильно перегреться и электроника выйдет из строя.
Поэтому винты подбираются под мотор. Ну или мотор под винты, тут как посмотреть. Обычно на сайтах продавцов моторов можно встретить информацию о рекомендуемых пропеллерах и аккумуляторах для выбранного мотора, а также тесты создаваемой тяги и эффективности.
Также чем больше винт, тем больше его инерция. Если нужна маневренность, лучше выбрать винты с большим шагом или трехлопастные. Они при том же размере создают тягу в 1,2–1,5 раза больше. Понятно, что винты и скорость их вращения нужно подбирать так, чтобы они смогли создать тягу большую, чем вес аппарата.

И наконец, бесколлекторные моторы. У моторов есть ключевой параметр — kV. Это количество оборотов в минуту, которые сделает мотор, на поданный вольт напряжения. Это не мощность мотора, это его, скажем так, «передаточное число». Чем меньше kV, тем меньше оборотов, но выше крутящий момент.
Чем больше kV при той же мощности, тем больше оборотов и ниже момент. При выборе мотора ориентируются на то, что в штатном режиме он будет работать при мощности 50% от максимальной. Не стоит думать, что чем kV больше — тем лучше, для коптеров с типичной 3S-батареей рекомендуемое число находится в диапазоне от 700 до 1000 kV.
Об установке антенн rc и fpv на летающих моделях – где лучше установить антенны на квадрокоптере
Этот текст написан для людей недостаточно хорошо разбирающихся в деле радиочастот, радиолюбители со стажем, люди окончившие факультеты ВУЗов с тематикой “радиосвязь” сочтут сказанное ниже вопиющими упрощениями и весьма банальным и не охватывающим все аспекты.
Сразу о главном в деле установки антенн
Не ставьте антенны RC и FPV работающей на 2.4ГГц или 5.8ГГц сверху летающих моделей. Антенны такой СВЧ аппаратуры работающей с землёй нужно ставить снизу моделей.
Антенны GPS и других систем работающих с сигналами сверху, наоборот нужно устанавливать сверху.
Немного о работе антенн вообще
Антенна обратимое устройство, то есть как хорошо или плохо она передаёт сигналы на некой частоте точно так же хорошо или плохо она и принимает.
Антенны обычно излучают и принимают сигналы не со всех направлений одинаково (только в теории есть так называемый “изотропный излучатель”, который принимает и излучает одинаково во все стороны). Проще говоря антенна как лампочка, только светит радиочастотными фотонами, а у лампочки есть цоколь – направление где свет не излучается. Для антенн есть такой параметр как “диаграмма направленности” – показывает в каких направлениях лучше, а в каких хуже работает антенна.
Об установке антенн с картинками и моделями созданными в программе MANNA-GAL
Антенна типа “диполь” два провода, последовательно один за другим, между ними включен источник сигнала или приёмник сигнала (это 90% штатных антенн аппаратур управления и их приёмников), если сравнивать её с лампочкой, является светящейся палочкой, соответственно если она стоит вертикально, то влево, вправо, вперёд и назад она излучает больше, а вверх и вниз гораздо меньше.
Для большей наглядности я нарисовал на скорую руку модель квадрокоптера (его токопроводящих частей) и антенны в программе расчёта антенн (сама антенна выделена на рисунках красным):
и более крупно часть с антенной:
Что бы не свернуть мозг программе, пришлось нарисовать коптер повёрнутым к земле под углом 90 градусов, что бы антенна оказалась параллельна земле, а для наглядности потом просто повернул готовые скриншотики, так что бы ось Х стала осью Z.
Расчёт диаграммы направленности антенны в такой её установке показывает следующее:
Можно видеть, что основное направление излучения сосредоточено по оси Х в сторону больших значений и разница между излучением вверх и вниз составляет аж 3 дБ (в 2 раза!), то есть если вы установили антенну RC сверху квадрокоптера, то отправляетете и принимаете в 2 раза больше мощности излучения в космос, нежели в сторону земли, где вы и находитесь с пультом в руках.
По сути это равносильно тому, что вы уменьшили мощность своей RC или FPV в 2 раза.
Если же антенна стоит наверху коптера не строго вертикально, а под неким углом (что на практике не редкость):
Картина с диаграммой направленности антенны становится ещё хуже:
Теперь уже проигрыш в сторону земли по излучению 10 дБ или в 10 раз!
То есть для сигналов приходящих с земли ваша антенна работает в 10 раз хуже.
Так как всё обратимо, то соответственно установив антенну снизу летательного аппарата вы получаете прибавку по уровню сигнала вашей аппаратуры на величину от 2 до 10 раз.
Более сложные антенны, например коллинеарные, в плане направленности будут работать точно так же, потому что токопроводящие элементы квадрокоптера (или иной модели) – элементы рамы, провода, аккумулятор, регуляторы работают как зеркало, рефлектор (так как они значительно больше длины волны на частоте 2.4ГГц и уж тем более 5.8ГГц).
О диапазонах на которых работает аппаратура в плане установки антенн
Когда речь заходит об антеннах, нужно оперировать не напрямую сантиметрами, а длиной волны.
Формула расчёта длины волны:
300 / ЧАСТОТА В МЕГАГЕРЦАХ = ДЛИНА ВОЛНЫ В МЕТРАХ
Соответственно:
433 МГц – длина волны 69 сантиметров.
2.4ГГц – длина волны 12,5 сантиметра.
5.8ГГц – длина волны 5,1 сантиметра.
Антенна должна устанавливаться так, что бы по крайней мере на расстоянии 2 длинны волны в той же плоскости не было токопроводящих элементов.
То есть если антенна вертикальная, то на расстоянии 2 длины волны от неё не должно быть вертикальных дюралевых трубок, уголков, проводов и тому подобного, иначе будет искажение диаграммы направленности, примерно по такому правилу:
– всё что больше половины длины волны есть рефлектор (отражает сигнал в сторону антенны);
– всё что меньше половины длины волны просто искажает диаграмму направленности или затягивает её на себя (от антенны).
Послесловие
Модель квадрокоптера для программы MANNA-GAL я рисовал так как это самая простая модель в плане токопроводящих элементов, программа не предназначена для создания сплошных токопроводящих плоскостей, для радиочастот сетка с ячейками менее четверти длины волны имеет почти то же действие, что и сплошная токопроводящая поверхность.
Если у кого то есть желание с точностью до миллиметра разрисовать свою модель и просчитать лучшее положение именно его конструкции антенны, могут сделать это самостоятельно (потратив недельку по вечерам, что бы разобраться с программой), программа MANNA-GAL бесплатна и доступна для скачивания здесь:
Особенности выбора комплектующих
- Моторы. Китайские интернет-магазины обычно хитрят и завышают характеристики. Поэтому для надёжности стоит купить моторы мощнее. Также это даст возможность поднимать более тяжёлую камеру. Также существует две разновидности моторов для квадрокоптера — это коллекторные и бесколлекторные

- Пропеллеры. Их цена зависит от цели вашего коптера. Если в ваши планы не входят более сложные «полёты» — пластиковых пропеллеров будет достаточно. Если же планируете аэрофотосъёмку – придётся брать композитные материалы. Чем дороже пропеллеры, тем они крепче и меньше уйдёт времени на балансировку.

- Пульт, приёмник сигнала. Пульт следует брать вместе с приёмником. В таком случае приёмник будет принимать сигнал, посылаемый с пульта. Нормальные пульты, опять-таки, стоят от тысячи рублей и выше – у них радиус действия выше. Сами же пульты могут иметь кучу ненужных переключателей, которые будут вас путать – такие экземпляры лучше не брать.

- Регуляторы оборотов и батарея. Советуем брать сразу комплект двигателей с контроллерами. Можно обойтись и без этого, но тогда настраивать мощность придётся самим. Батарею следует покупать по мощнее, особенно, если хотите ставить более тяжёлую камеру.

- Контроллер. Контроллеры бывают двух типов. Универсальный удобен тем, что работает на дронах любой сборки, этому способствуют датчики и многофункциональность. Недостатком является цена контроллера – от 17 тысяч рублей. Также его придётся настраивать через специальный софт, написанный под конкретную модель. Специализированный контроллер уже имеет необходимые настройки под конкретный тип коптера.
- Камера. Выбор камеры для коптера – дело непростое. Советуем поставить камеру типа GoPro или аналоги от китайских фирм – их качество не сильно разнится. Главную роль играет вес и угол обзора, о последнем расскажем чуть ниже. Чем массивней камера, тем сложнее будет её от центровать. Вы можете рассчитать положение камеры по формуле L= 2 * tg (A /2) х D , (L – область обзора, A – угол, D – расстояние до пропеллеров).
Постройка diy квадрокоптера. часть 1 теория
Решили собрать квадрокоптер? Для вас это темная чаща? Не знаете за что взяться? Статья именно для вас. Составлена на личном опыте.
Часть 2
Заинтересовали квадрокоптеры. Решил сделать заказ, выбор пал на хабсан х4 c камерой 0.3мр.
Дождался, получил.Достаточно много отлетал на нём(были краши, долгие ожидания запчастей и ремонты). Мой мозг посетила идея собрать большой квадрокоптер, окунулся в эту тему, перечитал много статей. По возможности отвечал на вопросы людей, состоящих в группе Rc моделистов: по поводу выбора деталей, сборки квадрокоптера. Из всего этого возникла идея написать сию статью.
Принцип полёта
Итак, Если вы решили собрать свой квадрокоптер, то вам необходимо определиться с бюджетом. От суммы, которую вы готовы потратить на это Чудо, зависит размер. Наиболее частые размеры(в мм.) это 250,330,450,550 и больше.
*250 размер: маленький, легкий, чаще все используют только для FPV полётов.
*330 и 450 золотая середина для бюджетного квадрокоптера. Приемлемая масса и цена сборки.
*550 и больше можно отнести к профессиональным коптерам или мультироторам. Такие машины получатся тяжелыми и дорогостоящими. Для данных ЛА будут мощные двигатели и они могут таскать приличный вес, вплоть до килограммовых зеркалок.
Своё повествование я продолжу опираясь на коптер 450 масштаба.
Особое место в данной категории занимают рамы DJI 330 и 450, TBS Discovery.
Цена их соответствующая…высокая.
Есть множество клонов, его я и выбрал.
gearbest.com/rc-parts/pp_88914.html
Настало время выяснить,что же такое квадрокоптер и из чего он состоит.
1. Рама
2. Приёмник/Передатчик
3. Контроллер полёта:
a) AIOP
b) NAZA
c) MuliWii
d) HKPilot
е) AMP
f) И другие
4. Силовая установка
a) Мотор
b) Регулятор скорости
c) Пропеллеры
5. Аккумулятор
6. Доп. Оборудование:
a) FPV система (вид от первого лица в реальном времени)
• Курсовая камера
• Передатчик
• OSD
b) Подвес для бортовой камеры
c) Подсветка
Теперь можно все детально рассмотреть.
1) С рамой уже определились. 450 масштаб, клон TBS.
2) Приёмник/Передатчик. Выбор его имеет очень важное значение. Вам нужно для себя понять: как далеко вы хотите летать.
Самые популярные варианты:
1,5-2км обеспечит 2,4Ггц
433 мгц обеспечит около 5-10км(все зависит от мощности, можно улететь и на 20км)
Для себя выбрал 2,4Ггц FlySky Th9x 9каналов
Ссылка
Не дорогая и простая в настройке аппаратура.
Для квадрокоптера необходимо от 5 каналов.
Выбор данной аппаратуры обусловлен её популярностью, давностью на рынке.Существует множество клонов.Ведётся много споров по поводу того, какая фирма была первой, это та же тургига 9, авионикс и другие… В интернете множество настроек.
3) Контроллер полёта
На данный момент очень много контроллеров полёта для квадрокоптеров. Свой выбор я сделал. Это Naza Lite c GPS
banggood.com/ru/DJI-NAZA-Flight-Control-System-and-GPS-Lite-Version-p-906572.html
Не очень дорого и сердито. Наза требует минимальной настройки и сделать это очень просто.
С контроллерами AIOP, Crius и MultiWii будет много раз сложнее и особенно новичку.
Почему я взял контроллер с GPS?
Данная функция необходима для зависания в точке и возврата домой.
Я вижу это очень удобным функционалом.
4) Силовая установка
Вызывает множество вопросов у непосвященных.
Используются БК моторы. Они являются трёх фазными(3 провода), их КПД около 90%.
Для управления скоростью вращения таким мотором используется регулятор оборотов(регуль), который получает команды от контроллера полёта.
Рассмотрим рамы 330,450мм. В зависимости от ваших потребностей необходимо прикинуть вес квадрокоптера. В среднем получается от 1к до 1,5кг. Желательно чтобы тяга моторов была в 2-2,5 раза больше общей массы. Это говорит о том, что тяга должна быть 2-3 кг. Делим это на 4 и получаем тягу одного мотора: примерно 500-750 гр.
Возникает вопрос: какой двигатель выбрать? Смотрим в характеристики рамы: нас интересует какие двигатели можно в неё поставить. Должны интересовать первые 2 цифры: 22 или 28 в большинстве случаев.
Начинаем выбор двигателя. У названия двигателя вы увидите некую величину, например: 1100kv. Это величина обозначает количество оборотов на 1 вольт. Двигатели с высокими значениями kv имеют меньше витков обмотки статора, чем менее оборотистые.Из этого вытекает, что максимальная сила тока будет выше в двигателях с меньшим kv, которые имеют большую силу крутящего момента и это позволяет использовать большие пропеллеры.
Можно сравнить с коробкой передач автомобиля. 380kv и 1400kv это как первая и третья передача у авто.
380kv для размеренных медленных и долгих полётов с большой грузоподъемностью
1400kv для быстрого и маневренного хода.
В просторах интернета или же в описании этого двигателя можно увидеть его технические характеристики и результаты тестов. Нужно узнать максимальную силу тока (А) которую сможет потянуть двигатель и исходя их этих данных подобрать регулятор оборотов(ESC). Допустим max А для двигателя 20А. Тогда, ESC берём на 20-25% мощнее, 25-30А.
Теперь смотрим результаты тестов.
Например видим: 11х4.7 –3S-12А – 830гр
Это означает
11х4.7 — характеристики пропеллера(11-дюймы, 4.7 шаг )
3S — число банок LiPo батареи
12А — сила тока в цепи при данной нагрузке
830гр – тяга двигателя при даных условиях
Таким образом, максимальная тяга 830х4=3300 гр., max сила тока в цепи 12х4=48А
Максимальная сила тока нужна для подбора Аккума и Проводки.
Для начала не берите карбоновые пропы. Переплата. Учитесь летать на дешевых.
Крепление пропеллера зависит от самого двигателя. Большинство пропеллеров имеют адаптер под ось двигателя. Возможно крепление на Цангах или же резьбой. Есть прекрасные варианты самозатягивающиеся-крепления у DJI, при таком варианте ваш пропеллер никогда не открутится во время полёта.
Для более простых вариантов советую дополнительно закрепить герметиком для резьбы.
Обращаю внимание: сравнивать моторы с разным kv можно при условиях одного типоразмера. Например, EMAX XA 2212 существуют в разных конфигурациях:
820
980
1400
Их можно сравнить.
Эффективность мотора с 1400kv будет максимальной при использовании пропеллера 8040,
А мотора с 820kv — при пропеллере 1147.
Максимум крутящего момента будет у мотора с 820kv, поэтому целесообразно использовать большие пропеллеры. А мотор с 1400kv будет любить высокие обороты при меньшей нагрузке.
Разница между представленными моторами в обмотке.
Разумно их использовать так:
1400kv на раме 330 и пропеллерами 8040
980kv на раме 450 и пропеллерами 1045
820kv на раме 500-550 и пропеллерами 1147
Я выбрал gearbest.com/rc-quadcopters-parts/pp_154973.html
И пропеллеры gearbest.com/rc-parts/pp_109432.html
Замечательный набор.
Схема подключения
Для простоты: Сигнальный- черный, Силовой( -) — красный
5) Аккумулятор
Выбирая аккум необходимо подобрать токоотдачу. Это число С.(25С,35С)
Не забываем что, по нашим данным система кушает 48А.
Допустим что, есть аккум 3300mAh 3S 35C Lipo Pack
3300 mAh — ёмкость аккума
3S – число банок(одна банка 3,7v)
35C – токоотдача. Т.е. Аккум ёмкостью 3.3Ah(3300 mAh) х 35C = 115А
Что достаточно покрывает наше энергопотребление. Даже излишне. Чем больше С, тем тяжелее и дороже аккум.
Посмотрим сможет ли аккум такой же ёмкости, но с токоотдачей 25С справится с нашими задачами или нет: 3.3Ah(3300 mAh) х 25C = 82А
Ответ:да.
Такой аккум будет легче и дешевле.
Для контроля состояния батареи можно купить такую штуку.
gearbest.com/rc-quadcopters-parts/pp_137605.html
Для зарядки аккумов очень популярна Imax B6, будьте осторожны, очень много подделок.
gearbest.com/rc-parts/pp_27704.html
И не забывайте с LiPo надо очень осторожно обращаться.
Мой совет: берите не меньше пары аккумов.
6) Доп. Оборудование.
• Когда вы определились с дальностью полёт и выбрали систему управления, можно начинать выбор FPV системы:
FPV- дословно: вид от первого лица в реальном времени.
2,4Ггц совместима с 5,8Ггц
433Мгц совместима с 1,2 Ггц
Иначе будут создаваться совместные помехи.
Для своей 2.4Ггц я подобрал 5,8Ггц 200mw
gearbest.com/rc-parts/pp_27971.html
FPV-система стостоит из:
1) Курсовой камеры
2) Передатчика на квадрике
3) Приёмной станции на земле.
Для Увеличения дальности связи можно заменить стандартные антены на ”клеверы”
gearbest.com/rc-parts/pp_69370.html
Большая часть передатчиков питается в пределах 9-12v, небольшая 3S батарея сможет запитать передатчик и камеру, которая выбирается для данного вольтажа.
Что значит 200mw?
Это мощность передатчика. Она непосредственно влияет на дальность связи. На открытой местности с нештатными антенами сигнал можно получать на расстоянии до 1 км.
С учетом того, что моя система управления на расстояние больше 1,5-2км не способна, это идеальный
вариант для моих потребностей.
С выбором приёмника и передатчика теперь все понятно, а как выбрать камеру, их огромное колличество?
Выбор камеры первоначально упирается в денежные средства.
Есть камеры которые имеют функцию потоковой передачи данных и одновременной записи.Стоимость таких камер значительно выше. Очень популярной является камера мобиус.
gearbest.com/car-dvr/pp_145224.html
Появился её конкурент, тоже имеющий AV выход
gearbest.com/action-cameras/pp_143378.html
Можно использовать курсовую камеру из самых дешовых, без корпуса. Стоимость которой колеблется от 600 до 1000рублей, а записывать с помощью хорошей экшен камеры на подвесе.
У FPV камеры мы увидим число ТВЛ. Что это такое? Это число строк развертки. Для FPV камеры будет достаточно 500-700ТВЛ. Важное значение имеет уровень минимальной освещенности, данный параметр измеряется в люксах. 0.01 люкс достаточно для полётов даже вечером. Угол обзора имеет не менее важное значение. 100-120 градусов это идеально. Не плохо бы иметь автоматическую коррекцию засветов и авто. баланс белого.
Картинку можно вывести на такой монитор
gearbest.com/rc-parts/pp_117460.html
• Можно прикупить 2х- или 3х-осевой подвес для камеры. Такая штука позволяет поворачивать камеру и иметь более стабильную картинку, без рывков и дерганий.
Штука достаточно дорогая.
У меня вот такой: gearbest.com/rc-parts/pp_110479.html
• Естественно сама бортовая камера gearbest.com/action-cameras/pp_77094.html
• Можно установить LED подсветку, пищалку,GPS-трэкер
Как вы поняли, что бы собрать такой БПЛА необходимо не мало вложений.
Цена приблизительно в пределах 400-500 долларов.
Этот обзор предназначен для новичков и несет в себе теорию, в скором времени будет продолжение.Со сборкой и настройкой.
Я запланировал цикл статей и буду не спеша их реализовывать.
Буду рад критике,спасибо за просмотр.
Вскрою карты: конечный результат
Как такую штуку собрать и поднять в небо?
Инструкция будет в следующей части)
Вот небольшой ролик из первых полётов с подвесом.
P.S Покупалось все на личные средства.
Теория полета
В теории полета (аэродинамике) принято выделять три угла (или три оси вращения), которые задают ориентацию и направление вектора движения летательного аппарата. Проще говоря, летательный аппарат куда-то «смотрит» и куда-то двигается. Причем двигаться он может не туда, куда «смотрит».
Три эти угла принято называть крен, тангаж и рыскание. Крен — это поворот аппарата вокруг его продольной оси (оси, которая проходит от носа до хвоста). Тангаж — это поворот вокруг его поперечной оси (клюет носом, задирает хвост). Рыскание — поворот вокруг вертикальной оси, больше всего похожий на поворот в «наземном» понимании.

В классической схеме вертолета основной винт при помощи автомата перекоса лопастей управляет креном и тангажем. Так как основной винт обладает ненулевым сопротивлением воздуха, у вертолета возникает вращающий момент, направленный в сторону, противоположную вращению винта, и, чтобы его скомпенсировать, у вертолета есть хвостовой винт.
Изменяя производительность хвостового винта (оборотами или шагом), классический вертолет управляет своим рысканием. В нашем же случае все сложнее. У нас есть четыре винта, два из них вращаются по часовой стрелке, два — против часовой. В большинстве конфигураций используются винты с неизменяемым шагом и управлять можно только их оборотами.
Если мы увеличим обороты одного винта, вращающегося по часовой стрелке, и уменьшим обороты другого винта, вращающегося по часовой стрелке, то мы сохраним общий момент вращения и рыскание по-прежнему будет нулевым, но крен или тангаж (в зависимости от того, где мы сделаем ему «нос») изменятся.
А если мы увеличим обороты на обоих винтах, вращающихся по часовой стрелке, а на винтах, вращающихся против часовой стрелки, уменьшим (чтобы сохранить общую подъемную силу), то возникнет вращающий момент, который изменит угол рыскания. Понятное дело, что все это будем делать не мы сами, а бортовой компьютер, который будет принимать сигнал с ручек управления, добавлять поправки с акселерометра и гироскопа и крутить винтами, как ему надо.
Для того чтобы спроектировать коптер, необходимо найти баланс между весом, временем полета, мощностью двигателей и другими характеристиками. Все это зависит от конкретных задач. Все хотят, чтобы коптер летал выше, быстрее и дольше, но в среднем время полета составляет от 10 до 20 минут в зависимости от емкости аккумулятора и общего полетного веса.
Стоит запомнить, что все характеристики связаны между собой и, к примеру, увеличение емкости аккумулятора приведет к увеличению веса и, как следствие, к уменьшению времени полета. Чтобы узнать, сколько примерно твоя конструкция будет висеть в воздухе и сможет ли вообще оторваться от земли, существует хороший онлайн-калькулятор ecalc.ch.
Но прежде чем вбивать в него данные, нужно сформулировать требования к будущему аппарату. Будешь ли ты устанавливать на аппарат камеру или другую технику? Насколько быстрым должен быть аппарат? Как далеко тебе нужно летать? Давай посмотрим на характеристики различных компонентов.


 (LiPo) - 94182PRO")





