

- Описание проекта
- Сборка машинки
- Прошивка Arduino
- 4 Прошивка микроконтроллера
- Управление
- 1 ИК Порт.
- 2 Bluetooth
- Прочие прошивки
- Bluetooth модуль jy-mcu для arduino
- Демонстрация работы
- Интерфейс управления на планшете android.
- Машинка на arduino и bluetooth — аппаратная часть.
- Модернизация motor shield
- Настройки приложения
- Папки
- Подключение bluetooth jy-mcu к arduino mega 2560
- Принцип работы
- Программа bluetooth rc car – управление роботом-машинкой со смартфона на android
- Скетч для управления роботом на arduino по bluetooth через смартфон на android
- Шаг 1. комплектующие
- Шаг 2. шасси
- Шаг 3. моторы (приводы)
- Шаг 4. установка двигателей
- Шаг 5. ардуино контроллер
- Шаг 6. h-мост (модуль lm 298)
- Шаг 7. источник питания
- Шаг 8. электрические соединения
- Шаг 9. логика управления
- Электронная начинка
Описание проекта
Bluetooth машинка с FPV камерой под управлением Arduino
Особенности:
Сборка машинки
На занятиях мы с вами навесили на машинку все модули, что были в комплекте, и вы можете запрограммировать робота как минимум на:
Прошивка Arduino
Фактически, ваша машина имеет неограниченное число функций, если вы знаете как ее программировать. Если нет, можно взять стандартный и загрузить его в микроконтроллер. Для этого нужно:
4 Прошивка микроконтроллера
Запускаем среду Arduino IDE и скетч. Для этого достаточно кликнуть на желаемом скетче расширения .ino
Подключаем плату Ардуино к ПК. Ардуино должно определиться в программе:
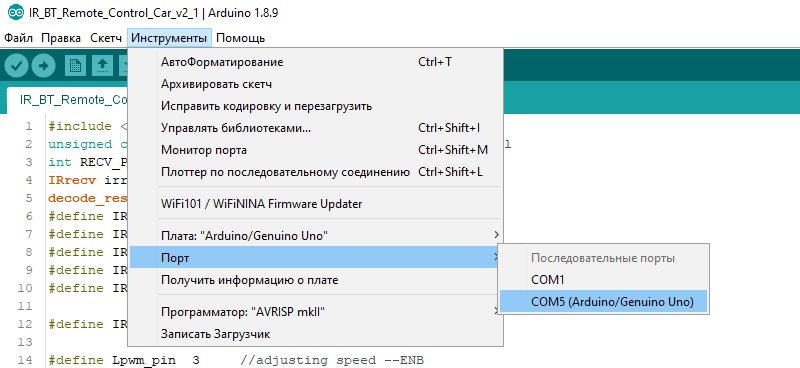
В разделе “Плата” должна стоять “Arduino UNO”
После этого мы жмем кнопку “загрузить”
И ждем пока пока программа загрузится в Ардуино.
В случае удачной прошивки все готово, можете пользоваться машинкой.
Управление
Важный момент – если светодиоды у машинки горят, но она не двигается, то проблема, возможно, в батарейках, они быстро садятся и если тока в них недостаточно (особенно дешевые батарейки), то двигатели просто не работают.
Поэтому для тестирования лучше использовать блок питания 7-12В, подключив его напрямую к входу ардуино (DC Power Jack) или к коннектору.
1 ИК Порт.
Машинка управляется с пульта, для управления используются вот эти кнопки:
(где квадрат это “стоп”)

Если машинка не едет, нужно нажать несколько раз вперед-назад.
2 Bluetooth
Управление с помощью Bluetooth осуществляется с помощью программы BLEJoystick (Android & IOS)
Сначала нужно узнать MAC адрес bluetooth модуля. Для этого нужно подать питание на модуль, уйти подальше от других bluetooth устройств и просканировать MAC адреса с помощью программы.
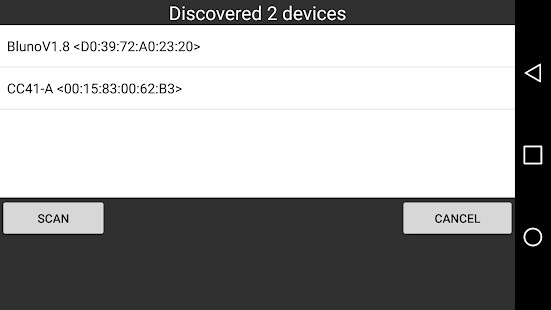
Один из адресов должен быть вашим (обычно он начинается на BT-05).
Адрес лучше записать.
Для подключения к машинке нужно нажать на соответствующий ей MAC адрес и нажать CONNECT.
Если у значка BT справа сверху появились две точки, это значит, что устройства сопряжены и можно продолжать, если нет, нужно попробовать еще раз, включив-выключив машинку.
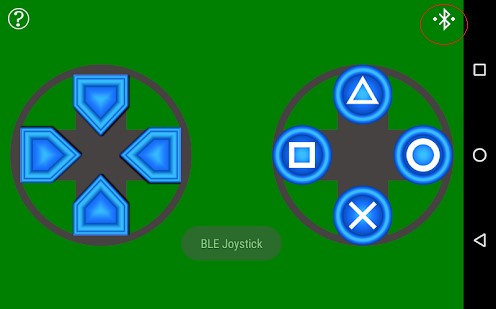
Управление – слева движение, Х – стоп.
В скетче вы также можете найти настройки Bluetooth и при необходимости использовать любое другое понравившееся приложение:
Символы A, C, B, D, G – это установки приложения BLEJoystick, другие приложения могут иметь другие управляющие символы.
Прочие прошивки
В папках вы также можете найти другие программы для машинки.
Папка Sketches-Factory содержит в себе программы, любезно украденные у китайцев.
Можете запрограммировать машинку на движение по линии или избегание препятствий.
Bluetooth модуль jy-mcu для arduino
Сам Bluetooth модуль JY-MCU довольно миниатюрный. В комплект поставки входит кабель для подключения. Назначение выводов расписано на обратной стороне.
Запитать его можно от источника питания 3,6-6В. Это предоставляет нам возможность подключить его напрямую к Arduino без использования стабилизатора или делителя напряжения.
Код, используемый при подключении к устройству: 1234.
Демонстрация работы
В следующий раз я планирую подключить к роботу ультразвуковой дальномер и реализовать алгоритм объезда препятствий.
Интерфейс управления на планшете android.
По многочисленным просьбам написал подробную инструкцию по разработке интерфейса управления на базе HmiKaskada android в статье Arduino танк с bluetooth управлением. Ссылка кликабельна.
Для устройств под управлением android существует программа HmiKaskada (ссылка на ЯндексДиск). Изначально она разрабатывалась как альтернатива дорогим промышленным HMI панелям. Но пытливые умы быстро смекнули что управлять она может чем угодно.
Есть платная и бесплатная версии программы. У меня есть обе но я принципиально сделал проект в бесплатной версии что бы показать вам и в очередной раз убедиться в абсолютной работоспособности free версии. Основное отличие free от PRO версий это работа только по блютуз.
На форуме FLProg есть гигантская ветка по вопросу совместимости с КаСкадой, да и разработчик активен и общителен. Скрин панели управления выкладывать не вижу смысла — он есть в видеоролике.
Машинка на arduino и bluetooth — аппаратная часть.
Первое что необходимо это шасси, то есть корпус с колесами и моторчиками, который и будет ездить на радость нам и окружающим. В моем случае был использован корпус от радиоуправляемой игрушки в которой выгорела силовая часть. Перспектива ремонта мне показалась унылой, да и хотелось чего то нового для своих детей.
Для управления электродвигателями нашего будущего творения понадобится Н-мост на микросхеме L298N Ссылка на Али, я брал у именно этот. Картинка кликабельна.
Может управлять двумя двигателями в диапазоне напряжений 5 — 35 вольт. Поддерживает ШИМ, то есть можно регулировать обороты двигателей. На плате есть вывод стабилизированного напряжения 5 вольт для питания ардуино.
Схема подключения проста и незатейлива:
Следующей неотъемлемой частью электронной начинки нашего проекта является bluetooth модуль HC-06. Самый обычный модуль для ардуино, настолько популярен что в дополнительном описании не нуждается.
Основным элементом и мозгом в моем случае выступает arduino nano, тут даже фото выкладывать не буду ибо все о ней знают и умеют с ней работать. Кстати подойдет любая плата ардуино, лишь бы в корпус поместилась 😀
Аккумуляторы и провода для пайки в определении спецификации не нуждаются. Выбор аккумуляторов зависит от рабочего напряжения электродвигателей.
Модернизация motor shield
Получилось так, что производители модуля Motor Shield лишили своих покупателей возможности устанавливать поверх своего продукта другой модуль. Видимо им нравится быть сверху или просто зажали нормальную панельку контактов.
Меня этот нюанс совсем не устраивает. Именно поэтому я решил взяться за паяльник и привести Motor Shield к удобному для меня виду.
Аккуратно выдрал родные панельки контактов и выкинул их нафиг.
Установил на их место нормальные.
В таком виде модулем стало пользоваться гораздо удобнее. Теперь я смогу нормально подключить провода от Bluetooth в разъемы, а не припаивать их намертво к контактам на Motor Shield.
Настройки приложения
Скриншот настроек Android приложения CxemCar версии 1.0:
К каждой настройке внизу есть небольшое пояснение, поэтому с их предназначением думаю не должно возникнуть вопросов. Однако на некоторых из них хотелось бы остановиться более подробно.
Точка разворота для мотора (ось X)
При наклоне Android-устройства влево или вправо программа притормаживает тот двигатель, в сторону которого наклонено устройство, т.о. осуществляется поворот. Однако, когда значение наклона доходит до заданной в настройках точки разворота, то двигатель начинает вращаться в другую сторону.
MAC адрес
Для установления связи с Bluetooth модулем машинки, в настройках приложения необходимо задать MAC-адрес. Предварительно необходимо настроить сопряжение устройств в настройках вашего Android-устройства. Для этого переходим в Настройки -> Bluetooth и нажимаем “Поиск устройств”, телефон находит наш Bluetooh-модуль, нажимаем по нему и вводим пароль (как правило 1234).
Узнать Bluetooth адрес модуля можно из какого-нибудь приложения, к примеру Bluetooth Terminal. Для этого внизу нажимаем “Connect a device – Secure” и в появившемся окошке нажимаем кнопку “Scan for devices”. ПО сканирует Bluetooth устройства и отобразит их MAC-адреса:
Этот MAC-адрес и необходимо прописать в настройках приложения CxemCAR.
Само ПО под Android я не буду расписывать, т.к. оно довольно таки громоздкое и поэтому если у вас возникнут какие-либо вопросы по нему, то обращайтесь тему поддержки данного проекта на форуме.
Папки
ВНИМАНИЕ! Если это твой первый опыт работы с Arduino, читай инструкцию
- libraries – библиотеки проекта. Заменить имеющиеся версии
- firmware – прошивки
- schemes – схемы подключения
- Android – все файлы с примерами для Android и Thunkable
Подключение bluetooth jy-mcu к arduino mega 2560
Подключение довольно простое.
Официальная схема подключения:
- VCC на JY-MCU подключаем к 5В Arduino
- GND на JY-MCU подключаем к GND Arduino
- TXT на JY-MCU подключаем к RX (0) на Arduino
- RXD на JY-MCU подключаем к TX (1) на Arduino
При таком варианте подключения придется каждый раз отключать питание модуля Bluetooth перед загрузкой скетча. Не забывайте про это.
Меня такой вариант не устраивает, поэтому я решил использовать дискретные порты с поддержкой Serial.
Неофициальная схема подключения:
- VCC на JY-MCU подключаем к 5В Arduino
- GND на JY-MCU подключаем к GND Arduino
- TXT на JY-MCU подключаем к дискретному PIN 50 на Arduino
- RXD на JY-MCU подключаем к дискретному PIN 51 на Arduino
Вот теперь можно загружать скетчи без отключения питания модуля Bluetooth.
Чтобы закрепить Bluetooth, я решил использовать плату Proto Shield и миниатюрную беспаечную макетную плату. К ней в будущем и буду подключать остальное оборудование, элементы управления и индикации.
Принцип работы
В Android устройстве формируются команды перемещения машинки в зависимости от наклона смартфона/планшета, либо от нажатой кнопки. Все расчеты производятся в Android-приложении, и сразу же вычисляются значения ШИМ для левого и правого двигателей. Приложение обладает гибкими настройками, такими как диапазон ШИМ, чувствительность наклона, минимальный порог ШИМ и др.
По Bluetooth передаются команды вида:L-255rR-120rL – команда для левого двигателя, R – для правогоминус обозначает вращение двигателя для движения назад255 – число ШИМ, для Arduino это максимальная скорость вращенияr – конец команды.
L255rR-255rПо данной команде левый двигатель будет вращаться вперед, а правый назад, что заставит машинку вращаться вокруг своей оси против часовой стрелки.
H1rКоманда включения дополнительного канала, к которому например можно подключить фары, звуковой сигнал и т.п. В качестве примера, приведен только один дополнитльный канал, однако ПО легко модифицировать, чтобы задействовать большее количество дополнительных каналов.
Символы команд L, R и H можно задавать в настройках Android-приложения.
В программе контроллера предусмотрен таймер, который отключает двигатели, если последняя команда была получена более, чем n-секунд назад. Настройка количества секунд хранится в EEPROM памяти контроллера и может быть изменена с Android устройства. Диапазон данной настройки составляет от 0.1 сек до 99.9 секунд.
Также, настройку можно совсем отключить. Но тогда, при потере связи машинка будет ехать, пока не будет выключено питание.Для работы с памятью микроконтроллера предусмотрены команды Fr – чтение значений и Fw – запись значений.
Программа bluetooth rc car – управление роботом-машинкой со смартфона на android
В свой смартфон я установил программу Bluetooth RC Car. На мой взгляд – это лучшая софтинка для управления роботом-машинкой.
Программа позволяет передавать команды при нажатии на кнопки или реагировать на данные с акселерометра в смартфоне, регулировать скорость движения ползунком, включать передние и задние фонари, включать и выключать звуковой сигнал, включать и выключать сигнал “аварийка”.
Для работы программы требуется Android версии 2.3.3 или выше. Размер программы 3 мегабайта.
Список команд:
- F – вперед
- B – назад
- L – влево
- R – вправо
- G – прямо и влево
- I – прямо и вправо
- H – назад и влево
- J – назад и вправо
- S – стоп
- W – передняя фара включена
- w – передняя фара выключена
- U – задняя фара включена
- u – задняя фара выключена
- V – звуковой сигнал включен
- v – звуковой сигнал выключен
- X – сигнал “аварийка” включен
- x – сигнал “аварийка” выключен
- 0 – скорость движения 0%
- 1 – скорость движения 10%
- 2 – скорость движения 20%
- 3 – скорость движения 30%
- 4 – скорость движения 40%
- 5 – скорость движения 50%
- 6 – скорость движения 60%
- 7 – скорость движения 70%
- 8 – скорость движения 80%
- 9 – скорость движения 90%
- q – скорость движения 100%
Как вы видите, полигон для творчества вполне неплохой. Я бы еще добавил возможность раздельного включения правых и левых фонарей для передних и задних фар.
Жирным я выделил команды, поддержка которых уже реализована в скетче. Остальные я собираюсь использовать по другому назначению.
Принцип передачи команд: при нажатии на кнопку в программе, команда передается по Bluetooth один раз, а при отпускании кнопки сразу передается команда S-остановка.
Скетч для управления роботом на arduino по bluetooth через смартфон на android
В своём скетче я реализовал следующие функции:
- Движение вперед
- Движение назад
- Разворот влево
- Разворот вправо
- Плавный поворот влево при движении вперед
- Плавный поворот вправо при движении вперед
- Плавный поворот влево при движении назад
- Плавный поворот вправо при движении назад
- Остановка
Установка скорости 0%
Установка скорости 10%
Установка скорости 20%
Установка скорости 30%
Установка скорости 40%
Установка скорости 50%
Установка скорости 60%
Установка скорости 70%
Установка скорости 80%
Установка скорости 90%
Установка скорости 100%
В скетче использовал функции, чтобы не дублировать код при схожих событиях.
Шаг 1. комплектующие
Для того, чтобы сделать модель машины на радиоуправлении (RC-машина) с использованием Ардуино и с возможностью контроля через смартфон, нам понадобятся следующие детали:
- Комплект шасси робота 4WD
- Arduino Uno
- Модуль H-моста LM298
- Модуль Bluetooth HC-05
- Батарея Li-po 12В
- Провода-перемычки
- Провода “папа-папа”
- Клейкая лента или любая другая лента
- Смартфон
Шаг 2. шасси
Вы можете купить готовый комплект для сборки 4WD шасси или сделать его с помощью ПВХ или любого вида жесткой доски. Наш вариант на фото выше был куплен в онлайн-магазине. Вполне возможно сделать аналог этого шасси своими руками. Не имеет особого значения вид шасси, можно выбрать на свой вкус.
Шаг 3. моторы (приводы)
В этом проекте используются 6В моторы постоянного тока. Вы можете использовать любой вид приводов на 6В постоянного тока. После того как вы купили моторы, нужно их подготовить перед размещением на шасси.
Отрежьте 4 кусочка красного и черного провода длиной примерно от 5 до 6 дюймов (12 – 15 см). Можно использовать провода 0,5 мм. Снимите изоляцию с проводов на каждом конце. Припаяйте провода к клеммам двигателей.
Вы можете проверить полярность двигателя, подключив его к батарейному блоку. Если он вращается в прямом направлении (красный провод с положительного и черный провод с отрицательного вывода батареи), то соединение правильное.
Шаг 4. установка двигателей
Следуйте фотографиям выше для того, чтобы понять как установить все двигатели на шасси нашей будущей модели радиоуправляемой машины, которую мы будем контролировать со смартфона.
Шаг 5. ардуино контроллер
Arduino UNO – это плата микроконтроллера с открытым исходным кодом, основой которой служит микроконтроллер Microchip ATmega328P и разработанная Arduino.cc.
Плата оснащена наборами цифровых и аналоговых пинов ввода/вывода (I/O), которые могут быть подключены к различным платам расширения (экранам) и другим цепям. Плата имеет 14 цифровых контактов, 6 аналоговых контактов и программируется с помощью Arduino IDE (интегрированная среда разработки)
Эталонный дизайн оборудования распространяется под лицензией Creative Commons Attribution Share-Alike 2.5 и доступен на веб-сайте Arduino. Макет и производственные файлы для некоторых версий оборудования также доступны. «Uno» означает один на итальянском языке и был выбран в честь выпуска Arduino Software (IDE) 1.0.
Плата Uno является первой в серии плат Arduino c USB и эталонной моделью для последующих платформ. ATmega328 на Arduino Uno поставляется с предварительно запрограммированным загрузчиком, который позволяет загружать новый код без использования внешнего аппаратного программера с использованием оригинального протокола STK500.
Микроконтроллеры обычно программируются с использованием диалекта функций из языков программирования C и C . В дополнение к использованию традиционных наборов инструментов компилятора проект Arduino предоставляет интегрированную среду разработки (IDE).
Шаг 6. h-мост (модуль lm 298)
Термин H-мост (англ. H-bridge) выведен из типичного графического представления такой схемы. Это схема, которая может приводить двигатель постоянного тока в прямом и обратном направлении, см. рисунок выше для понимания работы H-моста.
Он состоит из 4 электронных переключателей S1, S2, S3 и S4 (транзисторы / МОП-транзисторы (MOSFET) / IGBTS). Когда переключатели S1 и S4 замкнуты (а S2 и S3 разомкнуты), на двигатель идет положительное напряжение. Поэтому он вращается в прямом направлении.
Примечание. Переключатели в одном и том же плече (S1, S2 или S3, S4) никогда не замыкаются в одно и то же время, это приведет к короткому замыканию.
H-мосты доступны в виде интегральных микросхем, или вы можете создать свой собственный, используя 4 обычных транзистора или полевых транзистора (MOSFET). В нашем случае мы используем микросхему H-моста LM298, которая позволяет контролировать скорость и направление вращения двигателей. Ниже перейдем к описанию пинов:
Выход 1: двигатель постоянного тока 1 ” ” или шаговый двигатель A
Выход 2: двигатель постоянного тока 1 “-” или шаговый двигатель A-
Выход 3: двигатель постоянного тока 2 ” ” или шаговый двигатель B
Выход 4: двигатель B выведен
12В контакт: 12В вход, но вы можете использовать от 7 до 35 В
GND: земля
Вывод 5В: выход 5 В, если перемычка 12 В на месте, идеально подходит для питания вашего Arduino
EnA: включает сигнал ШИМ для двигателя А
IN1: включить двигатель A
IN2: включить двигатель A
IN3: включить двигатель B
IN4: включить двигатель B
EnB: включает сигнал ШИМ для двигателя B
Шаг 7. источник питания
Для нашей радиоуправляемой модели машины на основе Ардуино и с контролем через смартфон могут быть использованы следующие батареи:
- Щелочная батарея типа АА (не перезаряжаемая)
- AA NiMh или NiCd аккумулятор
- Литий-ионный аккумулятор
- Батарея LiPo
Шаг 8. электрические соединения
Для реализации соединений нужны перемычки. Соедините красные провода двух двигателей (с каждой стороны) вместе и черные провода вместе. Таким образом у нас теперь есть два терминала с каждой стороны. MOTORA отвечает за два правых двигателя, соответственно два левых двигателя подключены к MOTORB. Следуйте инструкциям ниже, чтобы соединить все.
Соединения двигателей
Out1 -> Красный провод левого бокового мотора ( )
Out2 -> Черный провод левого двигателя (-)
Out3 -> Красный провод правой стороны двигателя ( )
Out4 -> Черный провод правой стороны двигателя (-)
LM298 -> Arduino
IN1 -> D5
IN2-> D6
IN2 -> D9
IN2-> D10
Модуль Bluetooth -> Arduino
Rx-> Tx
Tx -> Rx
GND -> GND
Vcc -> 3,3 В
Питание
12V -> Подключите красный провод аккумулятора
GND -> Подключите черный провод аккумулятора и вывод Arduino GND
5V -> Подключение к контакту Arduino 5V
Шаг 9. логика управления
Логика управления описывается в таблице ниже.
Электронная начинка
Структурная схема CxemCAR представлена ниже:
Как видим, к контроллеру (Arduino, STM32 и др. неважно какой) подключается Bluetooth модуль и драйвер двигателей, к которому в свою очередь подключается 2 или 4 моторчика Bluetooth-управляемой модели. На схеме изображен один выход дополнительного канала (включение звукового сигнала, фар и т.п.), но путем небольшой правки программы число дополнительных каналов может быть легко увеличено.


