
-870x400.jpg "GitHub - lobodol/drone-flight-controller: A quadcopter flight controller based on Arduino Uno")
Программирование и настройка контроллера аэродинамической скорости на основе arduino
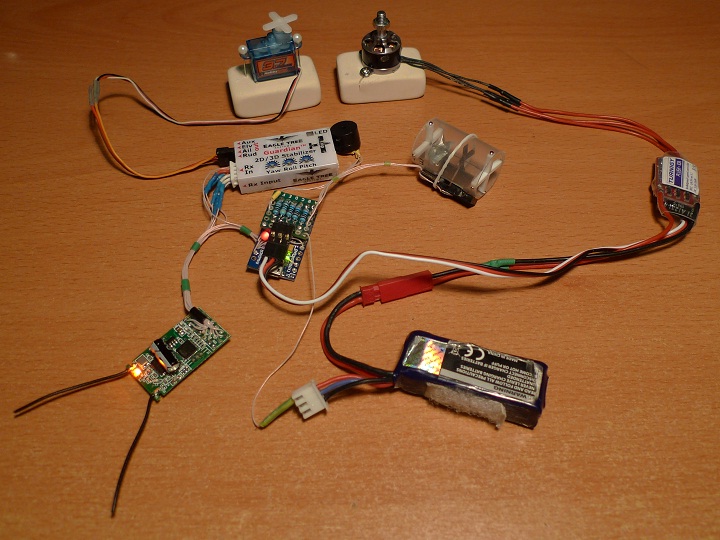
Эта статья является окончанием серией публикаций начатой со статьи Стабилизация крыла HK Mini-Sonic. Здесь объясняется, как запрограммировать и настроить контроллер аэродинамической скорости, построенный на основе стабилизатора Guardian Eagle Tree, пропеллерного датчика и платы Arduino Pro Micro.
Как залить прошивку в контроллер.
В прошлой статье Контроллер пропеллерного датчика аэродинамической скорости на основе Arduino я объяснял, как собрать контроллер и провести базовое тестирование. Теперь надо скомпилировать код и загрузить прошивку в контроллер:
– Загрузка программы производится через MicroUSB шнур с Windows компьютера. У меня установлена операционная система Windows 7, но и более новые версии операционной системы так же подходят.
– Сначала нужно установить драйвер платы Arduino для Windows. В большинстве случаев, при подсоединении платы через шнур MicroUSB к компьютеру, драйвер устанавливается автоматически. Но если этого не происходит, то необходимо установить его вручную – в интернете есть много примеров, как это делается.
– Необходимо скачать и установить на Windows компьютер последнюю версию стандартной и создать в ней пустой скетч.
– Открыть страницу проекта в депозитарии github и скопировать в окно скетча. Сохранить скетч на диск.
– Проверить подключение платы Arduino – В среде разработки Arduino, в настройках меню “Инструменты” выбрать плату “Arduino Leonardo”. Если драйвер платы установлен правильно, после этого должна появиться новая строка типа “Порт: COM4 (Arduinon Leonardo)”. Если такая строка не появилась, ситуацию можно попробовать исправить отсоединением-соединением платы и рестартом программы среды разработки.
– Выполнить команду “Файл->Вгрузить”. Во время загрузки плате Arduino должн мигать RX светодиод, подтверждающий передатчу данных – через несколько секунд контроллер будет запрограммирован. При первом запуске программы программы, контроллер записывает предустановленные параметры стабилизации в память EEPROM – после этого он должен издать звуковой сигнал длинной в 3 сек., последующие включения и программирования контроллера не должны производить такого эффекта.
Все – прошивка залита в контроллер, можно отсоединить плату от компьютера.
Как работает программа контроллера?
Для работы с контроллером совсем не надо разбираться в программировании и понимать математические алгоритмы стабилизации, использованные в программе. Но лучше иметь хотя бы общее представление:
– На плату Arduino приходит 3 импульсных ШИМ сигнала с приемника (THR_IN, GAIN_IN, MOD_IN) и один импульсный сигнал c фотодиода оптопары – PROP_IN.
– Плата Arduino запрограммированна таким образом, что эти сигналы вызывают прерывания процессора. Это значит, что фронт или спад каждого сигнал независимо запускает специальную короткую подпрограмму – обработчик прерывания или вектор. Эти подпрограммы и занимаются измерением длительности сигналов управления и считают импульсы с пропеллерного датчика. Эти же эти подпрограммы, используя встроенный в Ардуино 32-битный таймер, формируют выходные импульсы THR_OUT, GAIN_OUT, а так же управляют включением-выключением зуммера и светодиода.
– Для вычисления выходных значений тяги и коэффициента усиления Guardian используются простейшие формулы из теории управления систем с обратной связью. Самые важные параметры этих формул записаны в энергонезависимую память контроллера Ардуино – EEPRPOM. Они могут быть изменены без перезаливки прошивки, непосредственно с пульта управления моделью с помощью “режима программирования параметров”.
Настройка контроллера:
Контроллер управляется следующими каналами передатчика.
– Сигнал Thr – тяга двигателя.
– Сигнал Gain формируется одним из потенциометров, расположенных на панели передатчика.
– Сигнал Mod – поступает с 3-х-позицинного переключателя, формирующего три длительности импульса управления 1.1 мс, 1.5 мс, 1.9 мс которые соответствуют трем режимам стабилизации Guardian: 2D – 3D – X. Верхнее положение переключателя X – “стабилизация выключена” должно соответствовать максимальной длительности импульса.
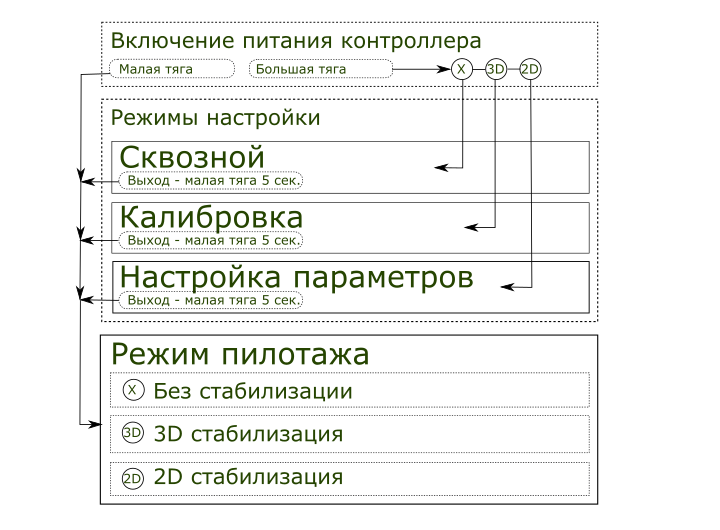
Режимы работы контроллера
У контроллера есть 4 основных режима работы:
– Режим пилотажа.
– Сквозной режим.
– Режим калибровки.
– Режим программирования параметров.
Для управления моделью используется режим пилотажа. Для настройки контроллера и других электронных элементов используются сквозной режим, режим калибровки и режим программирования. Выбрать режим можно только в момент включения контроллера.
Вход режим пилотажа происходит, когда при включении питания контроллера, тяга модели выключена (рычажок тяги находится в нижнем положении).
Вход в любой режим настройки осуществляется включением питания контроллера в момент, когда тяга не выключенна (рычажок тяги находится в центральном положении). Выбор режима настройки определяется положением 3-х позиционного переключателя:
– Верхнее положение (X) – сквозной режим, подтверждение – один бип.
– Среднее положение (3D) – режим калибровки, подтверждение – два бипа.
– Нижнее положение (2D) – режим программирования параметров, подтверждение – три бипа.
После включения передатчика, нельзя перейти из одного режима настройки в другой, но можно завершить настройку и перейти в режим пилотажа. Выход из любого режима настройки и вход в пилотажный режим произойдет после установления рычажка тяги в минимальное положения и ожидания в течении 5 сек.
Режим пилотажа
При входе в режим пилотажа контроллер издает длинный прерывистый сигнал и включает-выключает светодиод. В пилотажном режиме положение 3-х позиционного переключателя определяет, какая мода управления – Х, 3D, 2D будет выбрана. Переключение между модами управления можно осуществлять в любой момент времени. Потенциометр Gain отключен от управления (за исключением “Экспертного пилотажного режима”, см. ниже). Из режима пилотажа нельзя перейти в любой другой режим без выключения питания контроллера.
Сквозной режим
В этом режиме сигналы Thr, Gain, Mod просто копируются контроллером скорости и передаются неизменными на контроллер тяги модели и стабилизатор Guardian. Во многом, это похоже на поведение контроллера в пилотажной моде “без стабилизации”, но в этом режиме сигнал с 3-х позиционного переключателя передается непосредственно на стабилизатор Guardian и не вызывает переключения пилотажных мод управления. Данный режим необходим, чтобы настроить параметры контроллера тяги модели и стабилизатора Guardian с помощью пульта управления (действия при настройке описаны в документации этих устройств).
Режим калибровки
Для эффективной работы стабилизатора скорости ему нужно точно знать диапазон входных сигналов управления Thr и Gain (Сигнал Mod передает дискретную информацию и не нуждается в калибровке).
Режим калибровки обозначается часто мигающим светодиодом контроллера. Во время калибровки нужно поднять до максимума и опустить до минимума рычажок тяги, а так же провернуть потенциометр сигнала Gain от минимального до максимального положения. После этих действий рычаг тяги надо перевести в минимальное положение и подождать 5 сек. Если калибровка произведена правильно, то данные о временных характеристиках импульсов этих сигналов будут записаны контроллером в память EEPROM. Контроллер при этом издаст длинный звуковой сигнал. Если калибровка произведена неправильно, то данные о диапазонах сигналов управления не будут обновлены и контроллер, перейдя в пилотажный режим, продолжит использовать старые значения.
Режим программирования параметров
Для правильного функционирования контроллера необходимо установить параметры стабилизации. В текущей версии прошивки их шесть, они хранятся в энергонезависимой памяти Ардуино EEPROM и могут быть перепрограммированы непосредственно с пульта управления моделью. Программирование параметров здесь во многом похоже на настройку параметров контроллера бесколлекторных двигателей (если не совсем понятно, как эта настройка делается – поищите соответствующее видео на youtube).
Список параметров:
1 – Коэффициент подавления стабилизации гироскопа аэродинамической скоростью (GAIN_SUP_PARAM). Влияет на стабилизацию полета в зоне высокой аэродинамической скорости – чем параметр больше, тем сильнее скорость подавляет усиление в цепи обратной связи гироскопа-стабилизатора. Предустановленное значение – 0.32.
2 – Максимальный коэффициент стабилизации гироскопа (GAIN_MAX_PARAM). Влияет на полет на низких скоростях. Предустановленное значение – 1.0.
3 – Напряжение включения звуковой сигнализации низкого напряжения аккумулятора (LOW_BATT_PARAM). Диапазон значений 0.0 – 1.0 соответствует напряжениям 5.0V – 7.5V. предустановленное значение – 0.85 (6.8 V).
4 – Коэффициент чувствительности датчика аэродинамической скорости, определяет, как частота вращения пропеллерного датчика преобразуется в коэффициент управления стабилизацией (PROP_PARAM). Этот коэффициент подбирается для каждого датчика индивидуально. Для быстро вращающихся пропеллеров нужно устанавливать низкий коэффициент, для медленно вращающихся – высокий. Предустановленное значение 0.73 соответствует стандартной геометрии датчика, описанного в статье Изготовление пропеллерного датчика аэродинамической скорости.
5 – Коэффициент подавления тяги двигателя модели аэродинамической скоростью (THR_SUP_PARAM), параметр активен только в 2D режиме . Тяга двигателя модели будет автоматически будет уменьшена, если аэродинамическая скорость очень высокая или увеличена, если скорость слишком низкая и величина этих “корректирующих” изменений тяги будет пропорционально этому коэффициенту. Предустановленное значение – 0.39.
6 – Величина минимальной стабилизированной тяги, активен только в 2D режиме (THR_MIN_PARAM). Это вспомогательный параметр. Данный параметр предотвращает остановку бесколлекторного двигателя модели, не давая контроллеру уменьшить число оборотов двигателя до нуля и тем самым дав ему возможность перестать вращаться. Диапазон значений 0.0 – 1.0 соответствует диапазону тяги двигателя 0 – 20%. Предустановленное значение – 0.34 (6.4% тяги).
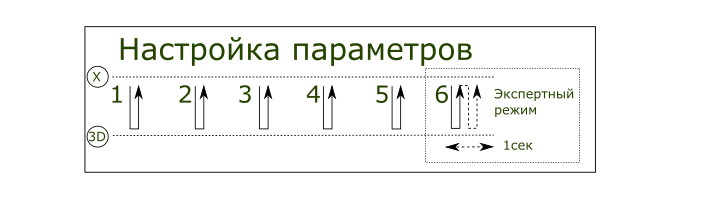
Выбор и программирование параметра
– Как выбрать параметр для установки значения? – Номер параметра соответствует некоторому положению рычажка тяти – минимальное значение тяги это 0 (выход) максимальное – 6. Чтобы установить значение параметра нужно перемещать рукоятку тяги по всему диапазону и найти необходимое положение – контроллер сообщит о номере параметра короткими бипами.
– Как установить и сохранить значение параметра? – Установка значения производится потенциометром канала Gain. Все параметры могут быть установлены в диапазоне 0.0 – 1.0. Если вращать потенциометр – светодиод на контроллере загорается, когда значение, установленное потенциометром параметра, становится выше “старого” значения, записанного в EEPROM. Так же, в момент совпадения нового и старого значения, зуммер производит короткий щелчок. Таким образом можно понять, какое значение параметра уже установлено и уменьшить или увеличить его. Запись нового значения в EEPROM производится кратковременным переключением 3-позицинного переключателя вверх-вниз-вверх (X)-(2D)-(X) . В подтверждение записи зуммер произведет короткий вибрирующий звуковой сигнал.
“Экспертный” пилотажный режим.
Для более точного подбора значения любого параметра у контроллера есть возможность “присвоить” ему потенциометр сигнала Gain и управлять им непосредственно в полете и после серии экспериментов записать EEPROM наиболее подходящее значение.
– Как включить экспертный режим и “присвоить” потенциометр параметру? Присвоение можно сделать непосредственно в режиме программирования параметров, непосредственно после записи этого параметра в EEPROM – если сразу после записи параметра в EEPROM переключить 3-х позиционный переключатель вверх-вниз-вниз еще раз (это необходимо сделать в течении 1 сек. после первого переключения), то параметр дополнительно будет ассоциирован с потенциометром. Для подтверждения, контроллер издаст длинный звуковой бип, подтверждающий это присвоение.
– Как записать значение “присвоенного” параметра в EEPROM? – Это не делается автоматически – нужно перейти в режим программирования параметров, выбрать положение рычажка тяги, соответствующее номеру параметра и, не трогая потенциометра, произвести запись значения параметра 3-х позиционным переключателем.
– Как завершить экспертный режим и “отключить” потенциометр от параметра? – для этого достаточно просто снова войти в меню программирования.
Экспертный пилотажный режим сохраняется даже после выключении питания контроллера, – при его активации, при каждом входе в пилотажный режим, после длинного вибрирующего сигнала, контроллер короткими бипами будет сообщать номер ассоциированного с потенциометром параметра.
Настройка и проверка контроллера.
Итак, программа залита в контроллер. Контроллер установлен в стенд, описанный в предыдущей статье Контроллер пропеллерного датчика аэродинамической скорости на основе Arduino , передатчик включен, тяга выставлена в ноль, 3-х позиционник поднят в режим пилотирования без стабилизации (Х).
Базовая проверка – Включаем питание – правильно работающий контроллер должен издать длинный вибрирующий сигнал – сигнализация о входе в пилотажный режим. При этом светодиод на контроллере должен загореться и погаснуть. Переключаем 3-х позиционник, контроллер должен издавать короткие звуковые сигналы при каждом переключении мод управления.
Проверка подсоединения стабилизатора Guardian – Переводим переключатель в 2D или 3D моду, когда гироскоп включен, – при покачивании стабилизатора сервопривод на стенде должен шевелить ‘рукой’.
Калибровка – Выключить питание контроллера, поставить переключатель в среднюю позицию (3D) и включить питание – контроллер войдет в режим калибровки. Откалибровать тягу, потом откалибровать потенциометр. Переместить рычаг тяги в нижнее положение и подождать 5 сек – контроллер должен издать длинный сигнал и перейти в режим пилотажа – калибровка закончена.
Проверка работы авто-подстройки усиления гироскопа – Перевести контроллер в режим 2D пилотажа, слегка наклонить Guardian, чтобы сервопривод изменил положение ‘руки’ и несильно подуть в пропеллерный датчик. При вращении пропеллера, коэффициент обратной связи, поступающия на Guardian, должен уменьшиться и сервопривод так же должен уменьшить угол отклонения ‘руки’ от нейтрального положения.
Проверка работы стабилизатора скорости – Перевести контроллер в 2D режим. Включить тягу, примерно 20% от максимальной мощности. Подуть в пропеллерный датчик – тяга должна заметно уменьшиться.
В целом, если все действия прошли успешно – контроллер уже готов к полетам и его можно устанавливать в модель. Конечно, параметры стабилизатора будут неидеальными, но более точно их значения можно подобрать только в реальных полевых испытаниях.
Способы устранения проблем
Правильно собранный контроллер практически не нуждается в настройке. Что же делать, если он работает не так, как написано выше? – Ниже несколько диагностических советов.
Нет звуковых сигналов, или не работает светодиод – проверить подключение зуммера или светодиода – здесь возможны обрыв или ошибка полярности.
Если при ри включенном передатчике, светодиод на контроллере мигает с 1 сек. периодом – значит значит сработала система детектирования потери сигналов управления – с приемника не приходит хотя бы один из сигналов THR_IN, GAIN_IN, MOD_IN. Необходимо проверить работу приемника и наличие всех управляющих сигналы на входах платы Ардуино.
Если все работает, но не вращается мотор – проверить подсоединение контроллера бесколлекторного двигателя к выходному сигналу платы Ардуино GAIN_OUT.
Если контроллер не реагирует на вращение пропеллера датчика аэродинамической скорости – скорее всего не работает или неправильно подключена оптопара – проверить напряжение на ножках HOA1874-012. С помощью осциллографа посмотреть, правильно ли подано питание на ножки светодиода и поступают ли импульсы с фотодиода при вращении пропеллера датчика.
Установка контроллера в модель
Я испробовал несколько конфигураций установки контроллера на крыло HK Mini Sonic, но наиболее удачное расположение потребовало изготовления специального компартмента для приемника, как показоно на фотографии. При установке, стабилизатор Guardian и приемник крепятся к корпусу модели толстой двусторонней клейкой лентой.

После установки, отделение приемника заклеивается сверху прозрачным скотчем.
Заключение
Зачем я написал эти несколько статей?
– Я хотел поделиться опытом – нет большого смысла делать такую сложную работу только для себя. Теперь после публикации всех пяти статей, я смогу не объяснять сто раз знакомым авиамоделистам, как это устройство работает :).
– Я давно задался идеей как-то использовать платы Arduino в авиа-моделировании. Теперь, начинание может быть продолжено – прошивка контроллера выложена в общественное пользование, она более-менее универсальна и понятна – знакомые с программированием моделисты могут придумывать ее дальнейшие модификации.
– И наконец – пропеллерный датчик скорости испытан, его характеристики, способы изготовления и подключения понятны – у него так же появились шансы быть востребованным.
Математика стабилизации, пид-регуляторы (pid)
Если вы решили заняться мультикоптерами, то рано или поздно вам придется столкнуться с настройкой ПИД-регулятора, поскольку этот математический аппарат применяется почти во всех задачах стабилизации: стабилизация углов квадрокоптера в воздухе, полет и удержание позиции по GPS, удержание высоты по барометру, бесколлекторные механизмы стабилизации видеокамеры в полете (подвес камеры).
Вы приобретаете двухосевой подвес для камеры, ставите туда, например, GoPro, включаете и вместо стабилизации получаете конвульсии, вибрации и дергания, хотя все датчики откалиброваны и механические проблемы устранены. Причина — неверные параметры ПИД-регуляторов.
Вы собираете мультикоптер, калибруете датчики, регуляторы, радио, все проверяете, пытаетесь взлететь, а он такой унылый в воздухе, что его даже легким ветерком переворачивает. Или наоборот: он такой резкий, что внезапно срывается с места и крутит тройное сальто без разрешения. Причина все та же: параметры ПИД-регуляторов.
Для многих устройств использующих ПИД-регуляторы существуют инструкции по настройке, а то и несколько в добавок к многочисленным видеонструкциям от самих пользователей. Но чтобы легче ориентироваться в этом многообразии полезно понимать, как же внутри устроены эти регуляторы.
Кроме того, мы же собираемся писать собственную систему стабилизации квадрокоптера! Предлагаю вместе со мной самим заново «изобрести» и «на пальцах» понять формулу ПИД-регулятора. Для тех, кому больше нравится сухой математический язык, я рекомендую Википедию, английскую статью, т.к. в русской пока не так подробно изложен материал.
Будем рассматривать квадрокоптер в двумерном пространстве, где у него есть только один угол — угол крена, и два мотора: левый и правый.
В полетный контроллер непрерывно поступают команды с земли: «крен 30 градусов», «крен -10 градусов», «крен 0 градусов (держать горизонт)»; его задача — как можно быстрее и точнее их выполнять с помощью моторов с учетом: ветра, неравномерного распределения веса квадрокоптера, неравномерного износа моторов, инерции квадрокоптера и т.п.
Таким образом, полетный контроллер должен непрерывно решать задачу, какую скорость вращения подавать на каждый мотор с учетом текущего значения угла крена и требуемого. Непрерывно — это, конечно, громко сказано. Все зависит от вычислительных возможностей конкретного железа.
На Adruino вполне можно одну итерацию цикла обработки и управления уместить в 10 миллисекунд. Это значит, что раз в 10 миллисекунд будут считываться показания углов квадрокоптера, и на их основе будут отправляться управляющие сигналы к моторам. Эти 10 миллисекунд называют периодом регулирования. Понятно, что чем он меньше, тем чаще и точнее происходит регулирование.
Уровень газа поступает из приемника в контроллер. Обозначим его -20.gif "Программируем квадрокоптер на Arduino (часть 1)") . Напомню, что это среднее арифметическое между скоростями вращения всех моторов, выраженное в процентах от максимальной скорости вращения. Если
. Напомню, что это среднее арифметическое между скоростями вращения всех моторов, выраженное в процентах от максимальной скорости вращения. Если -21.gif "Программируем квадрокоптер на Arduino (часть 1)") и
и -22.gif "Программируем квадрокоптер на Arduino (часть 1)") — скорости вращения левого и правого моторов, то:где
— скорости вращения левого и правого моторов, то:где -25.gif "Программируем квадрокоптер на Arduino (часть 1)") — реакция квадрокоптера (усилие), которое создает момент вращения за счет того, что левый мотор вращается на
— реакция квадрокоптера (усилие), которое создает момент вращения за счет того, что левый мотор вращается на -26.gif "Программируем квадрокоптер на Arduino (часть 1)") быстрее, чем газ, а правый — на столько же медленнее.
быстрее, чем газ, а правый — на столько же медленнее. -27.gif "Программируем квадрокоптер на Arduino (часть 1)") может принимать и отрицательные значения, тогда правый мотор закрутится быстрее. Если мы научимся вычислять эту величину на каждой итерации цикла обработки, значит мы сможем управлять квадрокоптером. Понятно, что
может принимать и отрицательные значения, тогда правый мотор закрутится быстрее. Если мы научимся вычислять эту величину на каждой итерации цикла обработки, значит мы сможем управлять квадрокоптером. Понятно, что -28.gif "Программируем квадрокоптер на Arduino (часть 1)") как минимум должно зависеть от текущего угла крена (
как минимум должно зависеть от текущего угла крена (-29.gif "Программируем квадрокоптер на Arduino (часть 1)") ) и желаемого угла крена (
) и желаемого угла крена (-30.gif "Программируем квадрокоптер на Arduino (часть 1)") ), который поступает с пульта управления.Представим ситуацию: поступает команда «держать горизонт» (
), который поступает с пульта управления.Представим ситуацию: поступает команда «держать горизонт» (-31.gif "Программируем квадрокоптер на Arduino (часть 1)") = 0), а квадрокоптер имеет крен влево:
= 0), а квадрокоптер имеет крен влево:-33.gif "Программируем квадрокоптер на Arduino (часть 1)") — разность (ошибка) между
— разность (ошибка) между -34.gif "Программируем квадрокоптер на Arduino (часть 1)") и
и -35.gif "Программируем квадрокоптер на Arduino (часть 1)") , которую контроллер стремится минимизировать.
, которую контроллер стремится минимизировать.
Чем больше разность между желаемым углом крена и текущим, тем сильнее должна быть реакция, тем быстрее левый мотор должен закрутиться относительно правого. Если это записать с использованием наших обозначений:
Здесь P — коэффициент пропорциональности. Чем он больше, тем сильнее будет реакция, тем резче квадрокоптер будет реагировать на отклонение от требуемого угла крена. Эта интуитивно понятная и простая формула описывает работу пропорционального регулятора.
За несколько десятков миллисекунд (несколько итераций цикла обработки) под воздействием пропорционального регулятора квадрокоптер вернется в требуемое (в данном случае горизонтальное) положение. Все это время ошибка -37.gif "Программируем квадрокоптер на Arduino (часть 1)") и усилие
и усилие -38.gif "Программируем квадрокоптер на Arduino (часть 1)") будут иметь один и тот же знак, хоть и становиться все меньше по модулю. Набрав какую-то скорость поворота (угловую скорость) квадрокоптер просто перевалится на другой бок, ведь никто его не остановит в требуемом положении. Все равно что пружина, которая всегда стремится вернуться в начальное положение, но если ее оттянуть и отпустить — будет колебаться, пока трение не возьмет верх. Конечно, на квадрокоптер тоже будет действовать трение, но практика показывает, что его не достаточно.По этой причине в пропорциональный регулятор нужно добавить еще одно слагаемое, которое будет тормозить вращение квадрокоптера и препятствовать перерегулированию (переваливанию в противоположную сторону) — своего рода имитация трения в вязкой среде: чем быстрее поворачивается квадрокоптер, тем сильнее надо пытаться его остановить, конечно, в разумных пределах. Скорость вращения (скорость изменения ошибки ) обозначим как
будут иметь один и тот же знак, хоть и становиться все меньше по модулю. Набрав какую-то скорость поворота (угловую скорость) квадрокоптер просто перевалится на другой бок, ведь никто его не остановит в требуемом положении. Все равно что пружина, которая всегда стремится вернуться в начальное положение, но если ее оттянуть и отпустить — будет колебаться, пока трение не возьмет верх. Конечно, на квадрокоптер тоже будет действовать трение, но практика показывает, что его не достаточно.По этой причине в пропорциональный регулятор нужно добавить еще одно слагаемое, которое будет тормозить вращение квадрокоптера и препятствовать перерегулированию (переваливанию в противоположную сторону) — своего рода имитация трения в вязкой среде: чем быстрее поворачивается квадрокоптер, тем сильнее надо пытаться его остановить, конечно, в разумных пределах. Скорость вращения (скорость изменения ошибки ) обозначим как -39.gif "Программируем квадрокоптер на Arduino (часть 1)") , тогда:
, тогда:
где D — настраиваемый коэффициент: чем он больше, тем сильнее останавливающее усилие. Из школьного курса физики всплывают смутные воспоминания, что скорость изменения любой величины — производная этой величины по времени:
И вот пропорциональный регулятор превращается в пропорционально-дифференциальный (пропорциональное слагаемое и дифференциальное):
Ошибку -43.gif "Программируем квадрокоптер на Arduino (часть 1)") вычислить легко, ведь на каждой итерации мы знаем
вычислить легко, ведь на каждой итерации мы знаем -44.gif "Программируем квадрокоптер на Arduino (часть 1)") и
и -45.gif "Программируем квадрокоптер на Arduino (часть 1)") ; P и D — настраиваемые перед запуском параметры. Для вычисления производной (скорости изменения
; P и D — настраиваемые перед запуском параметры. Для вычисления производной (скорости изменения -46.gif "Программируем квадрокоптер на Arduino (часть 1)") ) необходимо хранить предыдущее значение
) необходимо хранить предыдущее значение-47.gif "Программируем квадрокоптер на Arduino (часть 1)") , знать текущее значение
, знать текущее значение -48.gif "Программируем квадрокоптер на Arduino (часть 1)") и знать время, которое прошло между измерениями (период регулирования). И вот она — физика шестого класса школы (скорость = расстояние / время):
и знать время, которое прошло между измерениями (период регулирования). И вот она — физика шестого класса школы (скорость = расстояние / время):-50.gif "Программируем квадрокоптер на Arduino (часть 1)") — период регулирования;
— период регулирования; -51.gif "Программируем квадрокоптер на Arduino (часть 1)") — значение ошибки с предыдущей итерации цикла регуляции. Кстати, эта формула — простейший способ численного дифференцирования, и он нам здесь вполне подойдет.
— значение ошибки с предыдущей итерации цикла регуляции. Кстати, эта формула — простейший способ численного дифференцирования, и он нам здесь вполне подойдет.
Теперь у нас есть пропорционально-дифференциальный регулятор в плоском «бикоптере», но осталась еще одна проблема. Пусть левый край будет весить чуть больше правого, или, что то же самое, левый мотор работает чуть хуже правого. Квадрокоптер чуть наклонен влево и не поворачивается обратно: дифференциальное слагаемое равно нулю, а пропорциональное слагаемое хоть и принимает положительное значение, но его не хватает, чтобы вернуть квадрокоптер в горизонтальное положение, ведь левый край весит чуть больше правого. Как следствие — квадрокоптер будет все время тянуть влево.
Необходим механизм, который бы отслеживал такие отклонения и исправлял их. Характерной особенностью таких ошибок является то, что они прявляют себя со временем. На помощь приходит интегральное слагаемое. Оно хранит сумму всех ошибкок -52.gif "Программируем квадрокоптер на Arduino (часть 1)") по всем итерациям цикла обработки. Как же это поможет? Если пропорционального слагаемого не достаточно, чтобы исправить маленькую ошибку, но она все равно есть — постепенно, со временем, набирает силы интегральное слагаемое, увеличивая реакцию
по всем итерациям цикла обработки. Как же это поможет? Если пропорционального слагаемого не достаточно, чтобы исправить маленькую ошибку, но она все равно есть — постепенно, со временем, набирает силы интегральное слагаемое, увеличивая реакцию -53.gif "Программируем квадрокоптер на Arduino (часть 1)") и квадрокоптер принимает требуемый угол крена.Тут есть нюанс. Предположим
и квадрокоптер принимает требуемый угол крена.Тут есть нюанс. Предположим -54.gif "Программируем квадрокоптер на Arduino (часть 1)") равна 1 градусу, цикл регулирования — 0.1с. Тогда за одну секунду сумма ошибок примет значение 10 градусов. А если цикл обработки — 0.01с, то сумма наберет аж 100 градусов. Чтобы за одно и тоже время интегральное слагаемое набирало одно и тоже значение при разных периодах регулирования, полученную сумму будем умножать на сам период регулирования. Легко посчитать, что в обоих случаях из примера получается сумма в 1 градус. Вот оно — интегральное слагаемое (пока без настраиваемого коэффициента):Эта формула — не что иное, как численный интеграл по времени функции
равна 1 градусу, цикл регулирования — 0.1с. Тогда за одну секунду сумма ошибок примет значение 10 градусов. А если цикл обработки — 0.01с, то сумма наберет аж 100 градусов. Чтобы за одно и тоже время интегральное слагаемое набирало одно и тоже значение при разных периодах регулирования, полученную сумму будем умножать на сам период регулирования. Легко посчитать, что в обоих случаях из примера получается сумма в 1 градус. Вот оно — интегральное слагаемое (пока без настраиваемого коэффициента):Эта формула — не что иное, как численный интеграл по времени функции -56.gif "Программируем квадрокоптер на Arduino (часть 1)") в интервале от нуля до текущего момента. Именно поэтому слагаемое называется интегральным:
в интервале от нуля до текущего момента. Именно поэтому слагаемое называется интегральным:
где T — текущий момент времени.Пришло время записать окончательную формулу пропорционально-интергрально-дифференциального регулятора:
где -59.gif "Программируем квадрокоптер на Arduino (часть 1)") — один из настраиваемых параметров, которых теперь трое:
— один из настраиваемых параметров, которых теперь трое: -60.gif "Программируем квадрокоптер на Arduino (часть 1)") . Эта формула удобна в применении из программного кода, а вот формула, которая приводится в учебниках:
. Эта формула удобна в применении из программного кода, а вот формула, которая приводится в учебниках:
Существует несколько ее вариаций, например, можно ограничить модуль интегрального слагаемого, чтобы он не превысил определенный допустимый порог (мы так и будем делать).
Устройство бортового компьютера
Компоненты устройства:1. Платформа Arduino2. Модуль гироскопа акселерометра высотомера3. Модуль записи на SD-карте SD-карта4. Батарея питания5. Тумблер отключения питания6. Кнопка для сброса высоты7. Светодиоды-индикаторы взвода и зажигания8. Реле для замыкания внешней цепи при зажигании9. Несколько резисторов, указанных на схеме
Принципы работы устройства:1. Устройство непрерывно замеряет текущую высоту с помощью датчика высоты, и вычисляет среднее значение за последние 16 измерений — скользящее среднее (это нужно для сглаживания колебаний измерения, так как они довольно сильно «скачут»).2.
Если нажата кнопка сброса высоты, текущее скользящее среднее высоты берётся в качестве начала отсчёта, и, в дальнейшем измеряется так называемая «высота от точки старта» — это высота за вычетом данного начала отсчёта. Соответственно, в месте, где кнопка была нажата, будет 0 этой высоты.3.
В ходе вычислений замеряется максимальная «высота от точки старта», после достижения которой 10 метров (например), устройство переходит в состояние «взвод», максимальная высота продолжает замеряться (любая измеренная высота больше максимальной — объявляется новой максимальной), при этом зажигается светодиод взвода4.
Если, находясь в состоянии «взвод» замерянная высота окажется меньше максимальной на 1 метр (например), устройство переходит в состояние «запуск», замыкая реле, и зажигая светодиод запуска. Светодиод взвода при этом гасится. Реле может выполнить любую работу, например, подать напряжение на сервопривод, выпускающий парашют.5.
Общая схема подключения компонентов:
Модули, необходимые для приложения:
Для работы программы я собрал несколько библиотек, либо не входящих в репозиторий Arduino, либо других версий, которые удалось заставить работать.
Библиотека BMP085:BMP085.cppBMP085.h
Библиотека HMC5883LHMC5883L.cppHMC5883L.h
Библиотека I2CI2Cdev.cpp I2Cdev.h
Библиотека MPU6050MPU6050.cpp MPU6050.h
Все эти модули можно найти вместе с основным файлом программы в репозитории.
Код приложения:
#include <Wire.h>#include "BMP085.h"#include "I2Cdev.h"#include "MPU6050.h"#include "HMC5883L.h"#include <SPI.h>#include <Wire.h>#include "BMP085.h"#include "I2Cdev.h"#include "MPU6050.h"#include "HMC5883L.h"#include <SPI.h>#include <SD.h> #define TRUE 1#define FALSE 0 File myFile; HMC5883L compass; BMP085 pressure_m; MPU6050 accelgyro; //Контакт, куда подключено рэле#define EXEC_PIN 3//Контакт, куда подключена кнопка "сброс высоты"#define RESET_ALT_PIN 6//Контакт, куда подключен светодиод "взвод" (красный)#define ARMED_PIN 9//Время в течении которого надо держать рэле замкнутым, в миллисекундах#define FIRE_TIME 6000//Количество итераций для вычисления скользящего среднего высоты (лучше, чтобы было степенью двойки)#define RUN_ALT_NUM 16 //Контакт, куда подключена кнопка "положение X"#define POS_X_PIN 7//Контакт, куда подключена кнопка "положение Y"#define POS_Y_PIN 8//Контакт, куда подключена кнопка "положение Z"#define POS_Z_PIN 10 int16_t ax, ay, az;int16_t gx, gy, gz; bool blinkState =false;double dt =0;long counter =0;double t0 =-1;double millis_t =0;double io_t =0;double io_dt =40;double fired_millis_t =0; float base_altitude =0; float run_alt[RUN_ALT_NUM];int run_alt_index =0;int last_run_alt_index =0;int run_alt_count =0;float run_alt_summ =0; bool is_prepared = FALSE; bool is_armed = FALSE; bool is_fired = FALSE; bool is_led_armed = FALSE; bool is_led_fired = FALSE; bool is_done = FALSE; float arming_altitude =10;float fire_minus_altitude =1;float max_altitude =0; char filename[]="GY88_000.TXT"; void reset_running_alt();void reset_alt(float current_alt); /** * Сгенерировать имя файла */void generateFileName(){for(int i =0; i<1000; i ){ filename[5]= i/100 '0'; filename[6]=(i%100)/10 '0'; filename[7]=(i%10) '0';if(SD.exists(filename))continue; Serial.print("File: "); Serial.println(filename);break;}} /** * Отладочная функция, вычисляет сумму скользящего среднего "по-настоящему" */float debug_get_alt_summ(){float summ =0;for(int i=0; i< run_alt_count; i ){ summ = run_alt[i];}return summ;} void setup(){//Настраиваем режимы работы для цифровых контактов pinMode(EXEC_PIN, OUTPUT); pinMode(RESET_ALT_PIN, INPUT); pinMode(ARMED_PIN, OUTPUT);//Сбрасываем значения для скользящего среднего по высоте reset_running_alt(); //Включаем последовательный порт на максимальную скорость Serial.begin(230400);//while (!Serial) {;// wait for serial port to connect. Needed for native USB port only//} Serial.print("Initializing SD card..."); if(!SD.begin(4)){ Serial.println("initialization failed!");return;} Serial.println("initialization done."); //Сгенерируем имя файла generateFileName(); myFile = SD.open(filename, O_WRITE | O_CREAT); //Включаем протокол Wire Wire.begin(); TWBR =24; Serial.println("Initializing I2C devices...");//инициализируем акселерометр с гироскопом accelgyro.initialize(); accelgyro.setMasterClockSpeed(13); accelgyro.setI2CMasterModeEnabled(true);//инициализируем компас compass = HMC5883L(); setupHMC5883L(); //проверяем содеинение Serial.println("Testing device connections..."); Serial.println(accelgyro.testConnection()?"MPU6050 connection successful":"MPU6050 connection failed"); //калибруем датчик давления pressure_m.bmp085Calibration();} void loop(){ millis_t = millis();//Считаем температуру (её знает датчик давления)float temperature = pressure_m.bmp085GetTemperature();//MUST be called first//Считаем давлениеfloat pressure = pressure_m.bmp085GetPressure();//Вычислим высоту над уровнем моряfloat altitude = pressure_m.calcAltitude(pressure);float altitude_b = altitude - base_altitude; //Проведём вычисления для скользящего среднего по высоте run_alt[run_alt_index]= altitude_b;//run_alt_summ = altitude_b;if(run_alt_count == RUN_ALT_NUM){ last_run_alt_index =(run_alt_index ==0)? RUN_ALT_NUM -1: run_alt_index -1;//run_alt_summ -= run_alt[last_run_alt_index];}else{ run_alt_count =1;} run_alt_index =(run_alt_index 1== RUN_ALT_NUM)?0: run_alt_index 1; //Временно вычисляем медленным методом run_alt_summ = debug_get_alt_summ(); float run_altitude = run_alt_summ /(float) run_alt_count; //Вычислим dt (интервал между замерами в миллисекундах)if(t0 <0){ t0 = millis_t;}else{ dt = millis_t - t0; t0 = millis_t;} if(run_altitude > max_altitude){ max_altitude = run_altitude;} if(millis_t - io_t > io_dt){ io_t = millis_t;if(digitalRead(RESET_ALT_PIN)== HIGH){ reset_alt(altitude);} if(!is_done){if(!is_fired){if(is_prepared){if(!is_armed){if(max_altitude > arming_altitude){ is_armed = TRUE;}}else{if(max_altitude - run_altitude > fire_minus_altitude){ is_armed = FALSE; is_fired = TRUE; fired_millis_t = millis_t;}}}}else{if(millis_t - fired_millis_t > FIRE_TIME){ is_fired = FALSE; is_done = TRUE; is_prepared = FALSE;}}} if(is_armed != is_led_armed){ is_led_armed = is_armed; digitalWrite(ARMED_PIN, is_armed ? HIGH : LOW);} if(is_fired != is_led_fired){ is_led_fired = is_fired; digitalWrite(EXEC_PIN, is_fired ? HIGH : LOW);} } //Интервал между замерами Serial.print("dt:"); Serial.print(dt /1000,3); myFile.print("dt:"); myFile.print(dt /1000,3);//Сколько времени прошло с запуска? Serial.print(" tm:"); Serial.print(millis_t); myFile.print(" tm:"); myFile.print(millis_t);//Температура, в градусах цельсия Serial.print(" t:"); Serial.print(temperature,2); myFile.print(" t:"); myFile.print(temperature,2);//Давление, в паскалях Serial.print(" p:"); Serial.print(pressure,0); myFile.print(" p:"); myFile.print(pressure,0);//Высота над уровнем моря, в метрах Serial.print(" alt:"); Serial.print(altitude,2); myFile.print(" alt:"); myFile.print(altitude,2);//Высота над базовым уровнем, в метрах Serial.print(" altb:"); Serial.print(altitude_b,2); myFile.print(" altb:"); myFile.print(altitude_b,2);//Высота над базовым уровнем, в метрах, скользящее среднее Serial.print(" altr:"); Serial.print(run_altitude,2); myFile.print(" altr:"); myFile.print(run_altitude,2);//Высота над базовым уровнем, в метрах, максимальная Serial.print(" Malt:"); Serial.print(max_altitude,2); myFile.print(" Malt:"); myFile.print(max_altitude,2); //Статусы: Serial.print(" P"); Serial.print(is_prepared ?"1":"0"); myFile.print(" P"); myFile.print(is_prepared ?"1":"0"); Serial.print(" A"); Serial.print(is_armed ?"1":"0"); myFile.print(" A"); myFile.print(is_armed ?"1":"0"); Serial.print(" F"); Serial.print(is_fired ?"1":"0"); myFile.print(" F"); myFile.print(is_fired ?"1":"0"); Serial.print(" D"); Serial.print(is_done ?"1":"0"); myFile.print(" D"); myFile.print(is_done ?"1":"0"); //Считаем значения с магнитометра MagnetometerScaled scaled = compass.ReadScaledAxis();//Считаем значения с акселерометра и гироскопа accelgyro.getMotion6(&ax,&ay,&az,&gx,&gy,&gz); //Данные акселерометра: Serial.print(" ax:"); Serial.print(ax); Serial.print(" ay:"); Serial.print(ay); Serial.print(" az:"); Serial.print(az); myFile.print(" ax:"); myFile.print(ax); myFile.print(" ay:"); myFile.print(ay); myFile.print(" az:"); myFile.print(az);//Данные гироскопа Serial.print(" wx:"); Serial.print(gx); Serial.print(" wy:"); Serial.print(gy); Serial.print(" wz:"); Serial.print(gz); myFile.print(" wx:"); myFile.print(gx); myFile.print(" wy:"); myFile.print(gy); myFile.print(" wz:"); myFile.print(gz);//Данные магнитометра Serial.print(" cx:"); Serial.print(scaled.XAxis,3); Serial.print(" cy:"); Serial.print(scaled.YAxis,3); Serial.print(" cz:"); Serial.print(scaled.ZAxis,3); Serial.println(); myFile.print(" cx:"); myFile.print(scaled.XAxis,3); myFile.print(" cy:"); myFile.print(scaled.YAxis,3); myFile.print(" cz:"); myFile.print(scaled.ZAxis,3); myFile.println(); myFile.flush();} //Настройка модуля HMC5883L (компаса)void setupHMC5883L(){//Setup the HMC5883L, and check for errorsint error; error = compass.SetScale(1.3);//Set the scale of the compass.if(error !=0) Serial.println(compass.GetErrorText(error));//check if there is an error, and print if so error = compass.SetMeasurementMode(Measurement_Continuous);// Set the measurement mode to Continuousif(error !=0) Serial.println(compass.GetErrorText(error));//check if there is an error, and print if so} /** * Сброс высоты и перевод в состояние готовности - выполняется по нажатию кнопки */void reset_alt(float current_alt){ base_altitude = current_alt; is_prepared = TRUE; is_armed = FALSE; max_altitude =0; reset_running_alt();} /** * Сброс скользящего среднего для высоты */void reset_running_alt(){ run_alt_index =0; run_alt_count =0; run_alt_summ =0; last_run_alt_index =0;for(int i =0; i<RUN_ALT_NUM; i ){ run_alt[i]=0;}} |
#include <Wire.h>
#include “BMP085.h”
#include “I2Cdev.h”
#include “MPU6050.h”
#include “HMC5883L.h”
#include <SPI.h>
#include <Wire.h>
#include “BMP085.h”
#include “I2Cdev.h”
#include “MPU6050.h”
#include “HMC5883L.h”
#include <SPI.h>
#include <SD.h>
#define TRUE 1
#define FALSE 0
File myFile;
HMC5883L compass;
BMP085 pressure_m;
MPU6050 accelgyro;
//Контакт, куда подключено рэле
#define EXEC_PIN 3
//Контакт, куда подключена кнопка “сброс высоты”
#define RESET_ALT_PIN 6
//Контакт, куда подключен светодиод “взвод” (красный)
#define ARMED_PIN 9
//Время в течении которого надо держать рэле замкнутым, в миллисекундах
#define FIRE_TIME 6000
//Количество итераций для вычисления скользящего среднего высоты (лучше, чтобы было степенью двойки)
#define RUN_ALT_NUM 16
//Контакт, куда подключена кнопка “положение X”
#define POS_X_PIN 7
//Контакт, куда подключена кнопка “положение Y”
#define POS_Y_PIN 8
//Контакт, куда подключена кнопка “положение Z”
#define POS_Z_PIN 10
int16_t ax, ay, az;
int16_t gx, gy, gz;
bool blinkState = false;
double dt = 0;
long counter = 0;
double t0 = -1;
double millis_t = 0;
double io_t = 0;
double io_dt = 40;
double fired_millis_t = 0;
float base_altitude = 0;
float run_alt[RUN_ALT_NUM];
int run_alt_index = 0;
int last_run_alt_index = 0;
int run_alt_count = 0;
float run_alt_summ = 0;
bool is_prepared = FALSE;
bool is_armed = FALSE;
bool is_fired = FALSE;
bool is_led_armed = FALSE;
bool is_led_fired = FALSE;
bool is_done = FALSE;
float arming_altitude = 10;
float fire_minus_altitude = 1;
float max_altitude = 0;
char filename[] = “GY88_000.TXT”;
void reset_running_alt();
void reset_alt(float current_alt);
/**
* Сгенерировать имя файла
*/
void generateFileName()
{
for (int i = 0; i< 1000; i )
{
filename[5] = i/100 ‘0’;
filename[6] = (i0)/10 ‘0’;
filename[7] = (i) ‘0’;
if (SD.exists(filename)) continue;
Serial.print(“File: “);
Serial.println(filename);
break;
}
}
/**
* Отладочная функция, вычисляет сумму скользящего среднего “по-настоящему”
*/
float debug_get_alt_summ()
{
float summ = 0;
for (int i=0; i< run_alt_count; i )
{
summ = run_alt[i];
}
return summ;
}
void setup(){
//Настраиваем режимы работы для цифровых контактов
pinMode(EXEC_PIN, OUTPUT);
pinMode(RESET_ALT_PIN, INPUT);
pinMode(ARMED_PIN, OUTPUT);
//Сбрасываем значения для скользящего среднего по высоте
reset_running_alt();
//Включаем последовательный порт на максимальную скорость
Serial.begin(230400);
//while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
//}
Serial.print(“Initializing SD card…”);
if (!SD.begin(4)) {
Serial.println(“initialization failed!”);
return;
}
Serial.println(“initialization done.”);
//Сгенерируем имя файла
generateFileName();
myFile = SD.open(filename, O_WRITE | O_CREAT);
//Включаем протокол Wire
Wire.begin();
TWBR = 24;
Serial.println(“Initializing I2C devices…”);
//инициализируем акселерометр с гироскопом
accelgyro.initialize();
accelgyro.setMasterClockSpeed(13);
accelgyro.setI2CMasterModeEnabled(true);
//инициализируем компас
compass = HMC5883L();
setupHMC5883L();
//проверяем содеинение
Serial.println(“Testing device connections…”);
Serial.println(accelgyro.testConnection() ? “MPU6050 connection successful” : “MPU6050 connection failed”);
//калибруем датчик давления
pressure_m.bmp085Calibration();
}
void loop()
{
millis_t = millis();
//Считаем температуру (её знает датчик давления)
float temperature = pressure_m.bmp085GetTemperature(); //MUST be called first
//Считаем давление
float pressure = pressure_m.bmp085GetPressure();
//Вычислим высоту над уровнем моря
float altitude = pressure_m.calcAltitude(pressure);
float altitude_b = altitude – base_altitude;
//Проведём вычисления для скользящего среднего по высоте
run_alt[run_alt_index] = altitude_b;
//run_alt_summ = altitude_b;
if (run_alt_count == RUN_ALT_NUM)
{
last_run_alt_index = (run_alt_index == 0) ? RUN_ALT_NUM – 1 : run_alt_index – 1;
//run_alt_summ -= run_alt[last_run_alt_index];
}
else
{
run_alt_count =1;
}
run_alt_index = (run_alt_index 1 == RUN_ALT_NUM) ? 0 : run_alt_index 1;
//Временно вычисляем медленным методом
run_alt_summ = debug_get_alt_summ();
float run_altitude = run_alt_summ / (float) run_alt_count;
//Вычислим dt (интервал между замерами в миллисекундах)
if (t0 < 0)
{
t0 = millis_t;
}
else
{
dt = millis_t – t0;
t0 = millis_t;
}
if (run_altitude > max_altitude)
{
max_altitude = run_altitude;
}
if (millis_t – io_t > io_dt)
{
io_t = millis_t;
if (digitalRead(RESET_ALT_PIN) == HIGH)
{
reset_alt(altitude);
}
if (!is_done)
{
if (!is_fired)
{
if (is_prepared)
{
if (!is_armed)
{
if (max_altitude > arming_altitude)
{
is_armed = TRUE;
}
}
else
{
if (max_altitude – run_altitude > fire_minus_altitude)
{
is_armed = FALSE;
is_fired = TRUE;
fired_millis_t = millis_t;
}
}
}
}
else
{
if (millis_t – fired_millis_t > FIRE_TIME)
{
is_fired = FALSE;
is_done = TRUE;
is_prepared = FALSE;
}
}
}
if (is_armed != is_led_armed)
{
is_led_armed = is_armed;
digitalWrite(ARMED_PIN, is_armed ? HIGH : LOW);
}
if (is_fired != is_led_fired)
{
is_led_fired = is_fired;
digitalWrite(EXEC_PIN, is_fired ? HIGH : LOW);
}
}
//Интервал между замерами
Serial.print(“dt:”); Serial.print(dt / 1000, 3);
myFile.print(“dt:”); myFile.print(dt / 1000, 3);
//Сколько времени прошло с запуска?
Serial.print(” tm:”); Serial.print(millis_t);
myFile.print(” tm:”); myFile.print(millis_t);
//Температура, в градусах цельсия
Serial.print(” t:”); Serial.print(temperature, 2);
myFile.print(” t:”); myFile.print(temperature, 2);
//Давление, в паскалях
Serial.print(” p:”); Serial.print(pressure, 0);
myFile.print(” p:”); myFile.print(pressure, 0);
//Высота над уровнем моря, в метрах
Serial.print(” alt:”); Serial.print(altitude, 2);
myFile.print(” alt:”); myFile.print(altitude, 2);
//Высота над базовым уровнем, в метрах
Serial.print(” altb:”); Serial.print(altitude_b, 2);
myFile.print(” altb:”); myFile.print(altitude_b, 2);
//Высота над базовым уровнем, в метрах, скользящее среднее
Serial.print(” altr:”); Serial.print(run_altitude, 2);
myFile.print(” altr:”); myFile.print(run_altitude, 2);
//Высота над базовым уровнем, в метрах, максимальная
Serial.print(” Malt:”); Serial.print(max_altitude, 2);
myFile.print(” Malt:”); myFile.print(max_altitude, 2);
//Статусы:
Serial.print(” P”); Serial.print(is_prepared ? “1” : “0”);
myFile.print(” P”); myFile.print(is_prepared ? “1” : “0”);
Serial.print(” A”); Serial.print(is_armed ? “1” : “0”);
myFile.print(” A”); myFile.print(is_armed ? “1” : “0”);
Serial.print(” F”); Serial.print(is_fired ? “1” : “0”);
myFile.print(” F”); myFile.print(is_fired ? “1” : “0”);
Serial.print(” D”); Serial.print(is_done ? “1” : “0”);
myFile.print(” D”); myFile.print(is_done ? “1” : “0”);
//Считаем значения с магнитометра
MagnetometerScaled scaled = compass.ReadScaledAxis();
//Считаем значения с акселерометра и гироскопа
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
//Данные акселерометра:
Serial.print(” ax:”); Serial.print(ax);
Serial.print(” ay:”); Serial.print(ay);
Serial.print(” az:”); Serial.print(az);
myFile.print(” ax:”); myFile.print(ax);
myFile.print(” ay:”); myFile.print(ay);
myFile.print(” az:”); myFile.print(az);
//Данные гироскопа
Serial.print(” wx:”); Serial.print(gx);
Serial.print(” wy:”); Serial.print(gy);
Serial.print(” wz:”); Serial.print(gz);
myFile.print(” wx:”); myFile.print(gx);
myFile.print(” wy:”); myFile.print(gy);
myFile.print(” wz:”); myFile.print(gz);
//Данные магнитометра
Serial.print(” cx:”); Serial.print(scaled.XAxis, 3);
Serial.print(” cy:”); Serial.print(scaled.YAxis, 3);
Serial.print(” cz:”); Serial.print(scaled.ZAxis, 3);
Serial.println();
myFile.print(” cx:”); myFile.print(scaled.XAxis, 3);
myFile.print(” cy:”); myFile.print(scaled.YAxis, 3);
myFile.print(” cz:”); myFile.print(scaled.ZAxis, 3);
myFile.println();
myFile.flush();
}
//Настройка модуля HMC5883L (компаса)
void setupHMC5883L(){
//Setup the HMC5883L, and check for errors
int error;
error = compass.SetScale(1.3); //Set the scale of the compass.
if(error != 0) Serial.println(compass.GetErrorText(error)); //check if there is an error, and print if so
error = compass.SetMeasurementMode(Measurement_Continuous); // Set the measurement mode to Continuous
if(error != 0) Serial.println(compass.GetErrorText(error)); //check if there is an error, and print if so
}
/**
* Сброс высоты и перевод в состояние готовности – выполняется по нажатию кнопки
*/
void reset_alt(float current_alt)
{
base_altitude = current_alt;
is_prepared = TRUE;
is_armed = FALSE;
max_altitude = 0;
reset_running_alt();
}
/**
* Сброс скользящего среднего для высоты
*/
void reset_running_alt()
{
run_alt_index = 0;
run_alt_count = 0;
run_alt_summ = 0;
last_run_alt_index = 0;
for (int i =0; i<RUN_ALT_NUM; i )
{
run_alt[i]=0;
}
}
Данные, выдаваемые программой, должны быть примерно такими:
dt:0.048 tm:5760.00 t:26.80 p:100898 alt:35.61 altb:35.61 altr:35.60 Malt:35.60 P0 A0 F0 D0 ax:-1084 ay:16 az:-15708 wx:-282 wy:66 wz:-68 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:5807.00 t:26.80 p:100898 alt:35.61 altb:35.61 altr:35.61 Malt:35.61 P0 A0 F0 D0 ax:-1132 ay:100 az:-16276 wx:-282 wy:213 wz:-81 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.048 tm:5855.00 t:26.80 p:100898 alt:35.61 altb:35.61 altr:35.63 Malt:35.63 P0 A0 F0 D0 ax:-1016 ay:16 az:-15740 wx:-279 wy:149 wz:-78 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:5902.00 t:26.80 p:100895 alt:35.86 altb:35.86 altr:35.66 Malt:35.66 P0 A0 F0 D0 ax:-1152 ay:-48 az:-15596 wx:-247 wy:60 wz:-60 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:5949.00 t:26.80 p:100904 alt:35.11 altb:35.11 altr:35.64 Malt:35.66 P0 A0 F0 D0 ax:-1080 ay:-52 az:-15704 wx:-276 wy:54 wz:-61 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:5996.00 t:26.80 p:100902 alt:35.27 altb:35.27 altr:35.62 Malt:35.66 P0 A0 F0 D0 ax:-1152 ay:-44 az:-15652 wx:-290 wy:69 wz:-79 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:6043.00 t:26.80 p:100900 alt:35.44 altb:35.44 altr:35.60 Malt:35.66 P0 A0 F0 D0 ax:-1128 ay:-8 az:-15496 wx:-281 wy:37 wz:-70 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:6090.00 t:26.80 p:100897 alt:35.69 altb:35.69 altr:35.60 Malt:35.66 P0 A0 F0 D0 ax:-1048 ay:24 az:-15620 wx:-280 wy:59 wz:-75 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:6137.00 t:26.80 p:100902 alt:35.27 altb:35.27 altr:35.55 Malt:35.66 P0 A0 F0 D0 ax:-1164 ay:0 az:-15736 wx:-292 wy:73 wz:-69 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:6184.00 t:26.80 p:100899 alt:35.52 altb:35.52 altr:35.56 Malt:35.66 P0 A0 F0 D0 ax:-1088 ay:204 az:-15404 wx:-296 wy:-9 wz:-38 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.048 tm:6232.00 t:26.80 p:100897 alt:35.69 altb:35.69 altr:35.57 Malt:35.66 P0 A0 F0 D0 ax:-1220 ay:-340 az:-15976 wx:-261 wy:32 wz:-106 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.048 tm:6280.00 t:26.80 p:100902 alt:35.27 altb:35.27 altr:35.59 Malt:35.66 P0 A0 F0 D0 ax:-880 ay:144 az:-15828 wx:-289 wy:120 wz:-76 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:6327.00 t:26.80 p:100906 alt:34.94 altb:34.94 altr:35.53 Malt:35.66 P0 A0 F0 D0 ax:-1300 ay:52 az:-15292 wx:-274 wy:97 wz:-71 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:6374.00 t:26.80 p:100903 alt:35.19 altb:35.19 altr:35.50 Malt:35.66 P0 A0 F0 D0 ax:-1072 ay:-76 az:-15452 wx:-264 wy:55 wz:-74 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:6421.00 t:26.80 p:100905 alt:35.02 altb:35.02 altr:35.44 Malt:35.66 P0 A0 F0 D0 ax:-1040 ay:-4 az:-15844 wx:-297 wy:70 wz:-80 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:6468.00 t:26.80 p:100901 alt:35.36 altb:35.36 altr:35.40 Malt:35.66 P0 A0 F0 D0 ax:-1108 ay:64 az:-15644 wx:-294 wy:88 wz:-65 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:6515.00 t:26.80 p:100901 alt:35.36 altb:35.36 altr:35.39 Malt:35.66 P0 A0 F0 D0 ax:-1136 ay:80 az:-15628 wx:-287 wy:75 wz:-62 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:6562.00 t:26.80 p:100903 alt:35.19 altb:35.19 altr:35.36 Malt:35.66 P0 A0 F0 D0 ax:-1120 ay:-136 az:-15608 wx:-256 wy:37 wz:-76 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.047 tm:6609.00 t:26.80 p:100895 alt:35.86 altb:35.86 altr:35.38 Malt:35.66 P0 A0 F0 D0 ax:-1032 ay:-8 az:-15600 wx:-283 wy:81 wz:-68 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.048 tm:6657.00 t:26.80 p:100900 alt:35.44 altb:35.44 altr:35.35 Malt:35.66 P0 A0 F0 D0 ax:-1112 ay:-16 az:-15612 wx:-283 wy:59 wz:-77 cx:24508.800 cy:7121.720 cz:3551.200 dt:0.048 tm:6705.00 t:26.80 p:100901 alt:35.36 altb:35.36 altr:35.37 Malt:35.66 P0 A0 F0 D0 ax:-1084 ay:64 az:-15624 wx:-282 wy:73 wz:-66 cx:24508.800 cy:7121.720 cz:3551.200
Что означают данные:dt — интервал времени в миллисекундах с прошлого замераtm — количество миллисекунд, прошедшее с включения устройстваt — температура воздухаp — давление воздухаalt — высота по данным датчика-высотомераaltb — высота за вычетом «базовой» высоты, полученной при нажатии кнопкиaltr — скользящее среднее по последним 16 замерам высота altbЗначения-флаги (могут принимать значение 0 или 1, что означает НЕТ и ДА)
P — Была ли нажата кнопка установки базовой высоты, т.е. подготовлено ли устройство? (Prepared)A — Взведено ли устройство? Т.е. пройдена ли точка минимальной необходимой для взвода высоты (10 метров) (Armed)F — Активировано ли реле? т.е. выполнено ли условие снижения не 1 метр относительно максимальной набранной высоты?
(Fired)D — Закончена ли работа устройства? Этот флаг включается, когда выключается флаг F. После этого устройство больше никаких функций выполнять не будет, и для работы с ним его потребуется либо перезагрузить либо выключить и включить снова.
При этом те же самые данные программа будет писать на SD-карту, вставленную в кардридер. При каждом запуске устройства будет создаваться новый файл со следующим порядковым номером.





 купить по привлекательной цене 46990 руб. в Москве")