
 — настройка / Хабр")
- Что делать если в базовой комплектации квадрокоптера нет инструкции на русском
- Почему стоит ознакомиться с инструкцией по пользованию квадрокоптером
- Fyd-uav
- I2c и spi
- Xiro xplorer (версии: v/g/4k)
- Биндинг
- Вариант #2
- Вкладка blackbox
- Вкладка cli
- Вкладка configuration
- Вкладка failsafe
- Вкладка led strip
- Вкладка modes
- Вкладка pid tuning
- Вкладка setup
- Выбор гироскопа: частота опроса и шумы
- Где купить
- Гироскоп и акселерометр полетного контроллера
- Гоночные полетные контроллеры
- Датчик тока (current sensor)
- Инвентированный сигнал и uart
- Инструкции по эксплуатации квадрокоптеров и беспилотников
- Как настроить gps в betaflight
- Как настроить gps в inav
- Как подключить gps к контроллеру полета
- Как установить gps в квадрокоптер, а также как настроить
- Какие бывают полетные контроллеры?
- Кнопка для перехода в режим прошивки
- Контроллеры для автономных полетов
- Контроллеры для съемки видео и фото с дрона
- Модули gps
- Настройка
- Настройка передатчика
- О разделе
- Плата разводки питания (pdb)
- Подготовка
- Порт uart в полетном контроллере
- Процессор полетного контроллера
- Прошивка и настройка minimosd
- Прошивка и настройка регуляторов
- Прошивка полётного контроллера
- Прошивки полетного контроллера, их виды
- Размеры платы полетного контроллера
- Регулятор напряжения (bec)
- Регуляторы оборотов (esc)
- Светодиод состояния
- Сколько бывает портов uart на полетном контроллере?
- Типы коннекторов
- Черный ящик (blackbox)
- Заключение
Что делать если в базовой комплектации квадрокоптера нет инструкции на русском
Приобрели новенький дрон и столкнулись с проблемой отсутствия бумажного пользовательского руководства на русском языке в базовой комплектации? Замените его электронной версией, скачанной с нашего официального сайта.
Почему стоит ознакомиться с инструкцией по пользованию квадрокоптером
Игнорирование базовых положений, рекомендаций, советов и правил из пользовательской инструкции к квадрокоптеру зачастую чревато печальными последствиями. Дабы не стать жертвой собственной невнимательности и халатного отношения к технике, следует тщательно изучить такие параграфы: описание, технические характеристики, особенности эксплуатации, комплектация и гарантийное обслуживание.
Fyd-uav
Для этого приложения пока нет видеороликов
Для этого приложения пока нет обзоров
Для этого приложения пока не указаны ссылки
I2c и spi
SPI и i2c — это протоколы связи (BUS) между процессором и гироскопом . В зависимости от того, какой будет протокол, будет зависеть скорость работы самого гироскопа. Гироскоп сможет работать на частоте 32KHz с протоколом SPI, в то время как на i2c можно рассчитывать на «потолок» в 4 KHz. Поэтому выбирайте ПК с SPI.
Xiro xplorer (версии: v/g/4k)
Источник
Биндинг
Итак мы почти все настроили, осталось только забиндить аппу и идти летать. Есть два способа забиндить родную аппу с квадом.
Вариант #2
После этих манипуляций пошевели стиками, ты должен увидеть как бегают прогресс бары на мониторе. Если не бегают, то ты не забиндил аппу, проделай все действия заново.
На этом все, надеюсь что помог тебе собрать и настроить квад. Чистого неба, увидимся!
Вкладка blackbox
Blackbox — это «чёрный ящик» квадрокоптера. Нужен для диагностики, более точной настройки PID, а также чтобы можно было наложить инфографику на полётное видео (как
). Данные пишутся на внешний логгер или, если того позволяет объём памяти, на внутреннюю память ПК. Например, у Naze32 Acro её недостаточно, а у Naze32 Deluxe и SPRacingF3 Acro — хватает, хотя и не намного. При настройках по умолчанию, на 2Мб памяти можно записать данные полёта продолжительностью 3-4 минуты, что весьма мало.
Усугубляет ситуацию то, что реализовать запись «по кругу», как в автомобильных регистраторах, здесь невозможно из-за низкой скорости чтения/записи памяти. Единственный вариант — уменьшить в несколько раз скорость записи. Для диагностики такие данные уже будут малопригодны, а для видео — самое то. В этой вкладке я сделал следующее:
Как я уже писал выше, логгирование запускается тем же тумблером на аппаратуре, что и арминг, чтобы запись начиналась при старте моторов. Подробнее о работе и настройках Blackbox можно почитать в мануале. Также несколько полезных ссылок по теме:
Вкладка cli
CLI — это консоль, через которую можно менять уже более продвинутые настройки, а также делать резервную копию всех настроек. Я сделал следующее:
set small_angle = 180 # Включить возможность армить моторы даже в перевёрнутом состоянииset vbat_pid_compensation = ON # Включить компенсацию PID при разрядке батареиsave # Сохранить настройки
Также в Betaflight есть очень полезная возможность подключения к OSD через ПК. Теперь можно запрятать эту платку подальше, не беспокоясь, что к ней может понадобиться подключиться. Для подключения к плате OSD через ПК необходимо подключить батарею к квадрокоптеру, затем набрать в CLI команду serialpassthrough с необходимыми параметрами, затем отключить (Disconnect)
serialpassthrough 1 115200
На этом настройка полётного контроллера закончена.
Вкладка configuration
Собственно тут и производятся почти все настройки.
- В разделе «Board and Sensor Alignment» указал, что мой ПК повёрнут на 90 градусов по оси yaw. Корректность этого параметра потом можно проверить во вкладке Setup.
- В «Reciever Mode» выбрал RX_PPM.
- Выбрал ONESHOT125 в качестве протокола регуляторов (почему не MULTISHOT, я писал выше).
- Отключил «Unsynced PWM output», опять же, потому что не использую MULTISHOT.
- Чтобы моторы всегда вращались в заармленном состоянии, отключил MOTOR_STOP.
- Включил опцию «Disarm motors regardless of throttle value», так как буду делать арм моторов на отдельном канале.
- Уменьшил значение «Minimum Throttle» до 1030. Это обороты холостого хода, подбирал субъективно.
- Включил опцию «VBAT» для активации индикатора заряда батареи. Остальные параметры в разделе «Battery Voltage» я не менял, так как показания заряда соответствуют действительности. Если же в них есть погрешность, её можно убрать настройкой «Voltage Scale».
- В «Other Features» активизировал BLACKBOX, SUPEREXPO_RATES, а также LED_STRIP и выключил AIRMODE. О неё я расскажу чуть ниже.
Вкладка failsafe
C failsafe всё оказалось несколько сложнее, чем мне виделось ранее. На профильных форумах иногда встречаются холивары на тему «где лучше настраивать failsafe: на приёмнике или на ПК?» На самом деле, правильно это вопрос звучит так: «где лучше настраивать failsafe: только на приёмнике или на приёмнике и на ПК?»
Настраивать failsafe на приёмнике необходимо в любом случае. Здесь надо сделать важное уточнение, что речь идёт о приёмнике Frsky D4R-II, работающем по протоколу PPM. У приёмников с S.Bus failsafe настраивается иначе.
У Frsky D4R-II есть три варианта поведения при потере сигнала от передатчика:
По умолчанию в Frsky D4R-II установлен режим Hold Last Position, который способствует улёту аппарата в далёкие дали. Так что если использовать failsafe только на приёмнике, надо настраивать режим Pre-set Positions. Другое дело, что failsafe активируется даже при кратковременной потере сигнала.
Будет очень неприятно, если сигнал через долю секунды восстановиться, а квадрокоптер уже задизармил моторы и падает вниз. Ситуацию может улучшить настройка failsafe на ПК, так как там этот режим имеет задержку срабатывания, что служит фильтром от кратковременных потерь сигнала.
Кроме того, там есть настраиваемый сценарий, согласно которому квадрокоптер будет себя вести в случае активации failsafe. Например, можно включить режим со стабилизацией и попытаться более-менее мягко сесть или вообще активизировать RTH, если он есть.
Нюанс в том, что, если на приёмнике установлен режим Pre-set Positions или Hold Last Position, то ПК даже не узнает, что произошла потеря сигнала. Таким образом, failsafe на ПК можно использовать лишь в том случае, если на приёмнике установлен режим No Pulse. На Frsky D4R-II он устанавливается кратковременным (менее 1 сек) нажатием на кнопку failsafe
при выключенном передатчике
На вкладке Failsafe Betaflight Configurator`а я сделал следующее:
Вкладка led strip
Настроил свою подсветку на отображение предупреждений, индикацию поворотов/торможения и свечение синим цветом, когда ничего из этого нет.
Вкладка modes
Повесил на переключатели арминг моторов и Blackbox (AUX1), активацию полётного режима Horizon (AUX2) и включение пищалки (AUX3).
Отдельно хочется сказать про AIRMODE. Изначально он был уникальной «фишкой» Betaflight, но в какой-то момент стал так популярен, что Boris B поделился им с авторами Cleanflight и сейчас данный режим доступен и там тоже.
Несмотря на то, что AIRMODE отображается как отдельный режим полёта — это скорее дополнительная опция, а не полноценный режим. Он позволяет квадрокоптеру удерживать заданный угол даже при минимальном газе. Именно поэтому не рекомендуется использовать AIRMODE вместе с режимами со стабилизацией.
Кроме того, приземление с AIRMODE тоже процесс непростой: квадрокоптер начинает прыгать, как лягушка. Опытные пилоты предпочитают просто «ронять» квадрокоптер, выключая моторы в паре десятков сантиметров над землёй. Кстати, если у вас включена остановка моторов при нулевом газе (опция MOTOR_STOP во вкладке Configuration) и одновременно с этим работает AIRMODE, то остановки моторов не будет, так как AIRMODE имеет более высокий приоритет.
В Betaflight версии 2.8.1 появилась новая возможность: можно включить AIRMODE в фоновом режиме (что-то вроде пассивного перка в играх) и тогда он активен всегда и не будет отображаться во вкладке Modes, либо, как и ранее, повесить его включение на какой-либо канал. Делается это в «Other Features» вкладки Configuration.
У себя я не стал включать AIRMODE в фоновом режиме, так как использую ещё режим со стабилизацией HORIZON. Таким образом, у меня на AUX1 два полётных режима: HORIZON (для полётов со стабилизацией и посадки) и ACRO AIRMODE.
Вкладка pid tuning
Настройка PID — процесс, в который совершенно не стоит лезть «не зная брода». В первую очередь, необходимо теоретическое понимание этих трёх составляющих. Вот несколько статей, которые могут с этим помочь:
Я себя не чувствую готовым к подобной настройке, поэтому я оставил значения по умолчанию, благо Betaflight позволяет неплохо летать и с ними. Но два изменения я всё же сделал:
Вкладка setup
Сделал калибровку акселерометра.
Выбор гироскопа: частота опроса и шумы
Есть два критерия, которые нужно учитывать при выборе полетного контроллера с конкретным гироскопом, это частота работы и чувствительность к шумам (электро- и механическим).
На сегодня самыми популярными и надежными считаются гироскопы MPU6000, у них частота работы 8KHz, а также они достаточно не чувствительны к шумам. Советуем не покупать полетные контроллеры с гироскопами MPU6500 и MPU9250, у них хоть и частота выше, но они больше подвержены воздействию шумов.
Серия гироскопов ICM работает лучше и плавнее, чем MPU6000 на 32KHz, но из-за шумных двигателей и регуляторов оборотов производительность ICM будет ниже, чем MPU6000. Например, ICM20602 на Raceflight Revolt V2 или ICM20689 на Kakute F4, оба этих гироскопа могут работать на частоте 32KHz, но с регуляторами оборотов, которые генерируют много шума, они работать будут хуже, чем MPU6000. По этой причине на полетные контроллеры устанавливают сетевые фильтры для частичного удаления шумов.
Чтобы частично убрать механические шумы (вибрацию), полетный контроллер следует устанавливать на резиновые подушки или любой другой пористый материал, который сможет гасить вибрацию, например кусок резины или вспененного материала.
Где купить
Ниже ссылки на различные GPS-модули, которые подойдут для квадрокоптера. В продаже есть разные, в том числе с разъемами мини-джек, но вам нужны квадратные, как на фото в начале статьи.
Источник
Гироскоп и акселерометр полетного контроллера
Гироскоп и акселерометр — очень важные датчики, они определяют положение квадрокоптера в пространстве, а также движется ли он, посылают эти данные процессору, а тот уже решает, какому двигателю поддать газа, а какому наоборот, снизить обороты.
Акселерометр выполняет роль стабилизатора в пространстве, есть даже такой режим полета — «Режим стабилизации», при котором квадрокоптер невозможно будет перевернуть в воздухе и он всегда будет держаться параллельно земле (если просто отпустить стики на пульте). Опытные пилоты почти всегда летают в режиме АКРО, поэтому они отключают акселерометр или используют его крайне редко.
Гироскоп же выполняет роль определения положения квадрокоптера в пространстве.
Какие самые популярные гироскопы используются в полетных контроллерах? Смотрим таблицу ниже:
| Гироскоп | Протокол коммуникации (BUS) | Макс. частота работы гироскопа |
| MPU6000 | SPI, i2c | 8K |
| MPU6050 | i2c | 4K |
| MPU6500 | SPI, i2c | 32K |
| MPU9150* | i2c | 4K |
| MPU9250* | SPI, i2c | 32K |
| ICM20602 | SPI, i2c | 32K |
| ICM20608 | SPI, i2c | 32K |
| ICM20689 | SPI, i2c | 32K |
MPU9150 — это MPU6050 со встроенным магнитометром AK8975, а MPU9250 — это MPU6500 и тоже с магнитометром.
Номер и название гироскопа можно найти на самом чипе, например это — MPU-6000:
Гоночные полетные контроллеры
 Обычно имеют минимум расширенных функций, так как всякие компасы и барометры просто не используются при гонках.
Обычно имеют минимум расширенных функций, так как всякие компасы и барометры просто не используются при гонках.
Naze32, также на базе этого контроллера есть SP Racing F3:
На нем присутствуют все стандартные датчики – гироскоп и акселерометр, а в расширенной версии DELUXE также есть барометр и компас.
Гироскоп и акселерометр определяют текущее расположение дрона в пространстве. Барометр определяет высоту по давлению (чтобы удерживать высоту, например), компас для удержания направления полета.
На сегодня, полетные контроллеры серии F4 являются самыми популярными полетными контроллерами для мини и гоночных квадрокоптеров, так как прекрасно работают с такими программами, как CleanFlight, Betaflight и Raceflight. На их смену уже выходит серия F7, становясь все более популярной.
Разработка прошивок для полетного контроллера F3 уже прекратилась из-за ограничения ресурсов, поэтому выбирайте для покупки F4 или F7:
Betaflight прекращает разработку ПО для полетных контроллеров F3 c STM32F3
Также еще два популярных контроллера:
KISS – прошивать своей прошивкой нельзя. Имеет графический интерфейс с минимумом настроек.
LUX – такой же гибкий, как Naze32, но все же уступает ему. Прошивать можно.
Датчик тока (current sensor)
На плате разводки обычно есть контакты VBAT, куда подключаются контакты полетного контроллера и ПК снимает данные о текущем напряжении, но свой собственный датчик тока эффективнее.
Инвентированный сигнал и uart
Инвентированный сигнал поддерживают полетные контроллеры 3-го и 7-го поколения, а вот 1-е и 4-е поколения не могут.
Передатчики FrSky с протоколом работы SBUS и SmartPort на выходе инвертируют свой сигнал, и их могут обработать только процессоры нового поколения, такие установлены на 7-м и 3-м поколении (F3 и F7), так как у них уже есть встроенный инвертор.
А вот для устаревших поколений (F1 и F4) нужно перед портом UART устанавливать инвертор, который будет обрабатывать и преобразовывать сигнал и передавать его уже в UART. Хотя в некоторых полетных контроллерах F4 производители сразу устанавливают инверторы для SBUS и SmartPort, пилоту можно сразу подключать приемник к ПК.
Если у вас закончились UART порты, то можно воспользоваться функцией в Betaflight «soft-serial», благодаря которой можно создавать виртуальные UART. С помощью ПО Betaflight создается эмуляция этого порта, как будто он есть физически, но на самом деле его нет.
Инструкции по эксплуатации квадрокоптеров и беспилотников
Этот раздел нашего сайта посвящен брендовым дронам, а точнее, руководствам по их эксплуатации. Здесь полезную информацию, а также интересные сведения сможет отыскать каждый обладатель квадрокоптера или беспилотника таких брендов:
- DJI,
- HPRC,
- PowerVision и т.д.
Как настроить gps в betaflight
Настройка в Betaflight простая, просто следуйте инструкции ниже.
Зайдите на вкладку Ports, выберите свободный порт UART (в моем случае это UART3) и установите в блоке Sensor Input – GPS и 57600. Вы можете выбрать любое значение в выпадающем списке скорости передачи данных, но значение «9600» приводит к наименьшей скорости передачи данных, а 115200 — к наибольшей и полетный контроллер будет тратить меньше времени на накопление данных. Если выбрать «AUTO«, то скорость передачи данных будет установлена на 57600.
На вкладке
Configuration
включите функцию
GPS
. Установите для параметров
Auto BaudAuto Config
значение —
ON
. Выберите параметр
AutoDetect
на вкладке
Ground Assistance Type
. Существует два наиболее популярных протокола связи GPS модуля —
UBLOXNMEA
. Модули Beitian используют протокол UBLOX по умолчанию. Попробуйте каждый из этих протоколов, если вы не уверены, какой из них используется в вашем GPS модуле.
Если вы все правильно подсоединили и настроили GPS в квадрокоптер, то в статус-баре конфигуратора будет отображаться значок GPS:
Если включить режим эксперта (маленький переключатель в строке состояния), то можно увидеть состояние GPS, количество и силу принятых сигналов от спутников. После определения GPS-положения (накопления координат) на карте будет отображаться ваше (квадрокоптера) текущее положение:
Как настроить gps в inav
Настройка GPS в iNAV очень похожа на настройку в программе Betaflight Configurator.
На вкладке Ports выберите свободный UART-порт и в блоке Sensor выберите GPS и скорость.
Во вкладке Configuration, в блоке GPS, активируйте переключателем вкладку GPS for navigation and telemetry, затем выберите протокол UBLOX или NMEA. Затем в Ground Assistance Type выберите AutoDetect.
Если все хорошо, то в статус баре iNAV появится значок GPS, который свидетельствует о том, что все работает и GPS в квадрокоптер установлен верно:
В новых прошивках для полетного контроллера F3 (например, SpRacingF3) отсутствует поддержка GPS. За сообщение об этом спасибо читателю Руслану.
Как подключить gps к контроллеру полета
Обычно GPS модуль подключается к полетному контроллеру с помощью интерфейса UART. Можно использовать практически любой свободный порт UART. Я не рекомендую использовать SoftSerial UART для подключения GPS модуля. Соединение очень просто, для этого вам нужно подсоединить GPS TX к FC RX и GPS RX к FC TX. 
Выше и ниже примеры подсоединения GPS модуля к порту UART3 на полетном контроллере.
Как установить gps в квадрокоптер, а также как настроить
В этой статье я расскажу вам как установить GPS в квадрокоптер и как его настроить.
Какие бывают полетные контроллеры?
Ниже рассмотрим вопрос — какие бывают полетные контроллеры, а точнее, для каких целей.
Кнопка для перехода в режим прошивки
Без такой кнопки не обойтись ни одному полетному контроллеру. Для прошивки замыкают 2 контакта, затем подключают к компьютеру и запускают Betaflight конфигуратор или любой другой. Есть два типа:
С кнопкой удобнее — нажал отверткой и все, а вот для контактов нужно использовать пинцет или скрепку, чтобы закоротить их.
Контроллеры для автономных полетов
3DR Pixhawk — самый популярный контроллер для автономных полетов. На его борту есть резервная система, а также он поддерживает все известные датчики для дронов.
MultiWii Pro — дешевый и доступный, позволяет отлично стабилизировать коптер, также на нем есть барометр, магнитометр и GPS.
Теперь, после краткого обзора типов полетных контроллеров, перейдем к полному описанию.
Контроллеры для съемки видео и фото с дрона
 Самым популярным в этом сегменте коптеров является DJI NAZA-M V2: тот самый, что стоит в Фантомах. Идеальный контроллер для фото- и видеосъемки с качественной стабилизацией. На нем спокойно сможет летать новичок, который до этого ни разу не брал пульт в руки. В настройки полета лезть не требуется, все уже настроено, нужно будет просто откалибровать. Даже без навыков у новичка-пилота получится отличный кадр.
Самым популярным в этом сегменте коптеров является DJI NAZA-M V2: тот самый, что стоит в Фантомах. Идеальный контроллер для фото- и видеосъемки с качественной стабилизацией. На нем спокойно сможет летать новичок, который до этого ни разу не брал пульт в руки. В настройки полета лезть не требуется, все уже настроено, нужно будет просто откалибровать. Даже без навыков у новичка-пилота получится отличный кадр.
Поддерживает весь набор датчиков (GPS, телеметрию, OSD и т.д.)
ArduPilot AMP поддерживает GPS и автономный полет по заданным координатам. Тоже достаточно популярный контроллер, но стоит дороже обычных из-за наличия более важных датчиков.
Vector Flight Controller- профессиональный полетный контроллер с встроенной системой Eagle Tree.
Новичок тоже сможет на таком летать. Эти контроллеры стоят дорого, а вес и размер стремятся к идеалу для аэросъемки.
Модули gps
На рынке есть много различных GPS-модулей, которые можно использовать в квадрокоптерах для навигации. Одними из самых популярных GPS-модулей на сегодня являются:
Стоят они недорого, менее 10$.
Вот как они выглядят:
Кстати, если вы видите какие-то царапины на матовом участке GPS антенны, то это не отсутствие контроля качества дефектов производственного процесса, а наоборот — результат настройки антенны во время финального тестирования. Эти типы антенн имеют номинально настроенную частоту, но подвержены влиянию конструкции, размещенных компонентов и пайки. Маленькие царапины по центру краев или углов приводит к их точной настройке на нужную частоту:
Настройка
Тут все просто качай один из моих файлов настройки, загружай в квад и все готово.
Рекомендуется загружать настройки через командную строку CLI, но я покажу два способа загрузки конфигов.
Настройка передатчика
Передатчик (он же “пульт») каждый пилот настраивает индивидуально: таймеры, миксы, голосовые уведомления и прочее. Единственная вещь, сделать которую крайне желательно, это проверить минимальные, средние и максимальные значения стиков управления в конфигураторе.
Делается это во вкладке Reciever. Идеальные значения составляют 1000 — 1500 — 2000. В моём случае они составляли 996 — 1508 — 2020, что не очень хорошо. Во-первых, «выпадения» за пределы диапазона (значения менее 1000 и более 2000) плохи сами по себе.
Во-вторых, центральное положение, отличное от 1500, будет восприниматься ПК, как лёгкое подруливание, которое он будет отрабатывать и квадрокоптер постоянно будет сносить в какую-то сторону. Словом, имеет смысл повозиться и настроить «как надо».Как настроить эти значения на передатчике Taranis, показано здесь.
У меня Turnigy 9XR PRO, там это делается в пункте Limits. Также можно выполнить настройку через программу eePskye (вкладка Limits), но это неудобно, так как результат сразу не видно в Betaflight Configurator. Сделать это необходимо для каждого из четырёх каналов управления.
После настройки центральные значения максимально приблизились к 1500, но у меня они начали «прыгать» примерно на 5 единиц в одну или другую сторону. Не знаю, с чем это связано, вероятно, значения пульта являются пограничными для ПК и после их округления получается такой эффект.
set deadband = 6
Значение может быть от 0 до 32 и с его повышением чувствительность управления снижается. Управление становится более мягким. Надо понимать, что после определённого порога мягкость превратится в ватность, поэтому для себя я выбирал минимальное значение, при котором дёрганья исчезли.На этом всё, удачных полётов!
О разделе
Пополняемая библиотека инструкций для дронов и мультикоптеров на русском и английском языках.
Плата разводки питания (pdb)
К плате разводки питания подключаются аккумулятор и двигатели с регуляторами оборотов, а также полетный контроллер и прочая периферия. У некоторых ПК такая плата уже есть, они совмещены. Это, конечно, плюс, но где плюсы, там и минусы — в такой компоновке будет мало места, и в случае поломки ее будет сложнее устранять.
Подготовка
 Подключаем AIO F4 Flight Controller к компьютеру и проверяем его на работоспособность. Крайне редко но, бывает брак. Да и не забудь подключить антенны перед тем как подключить полетник к компьютеру, без антенн полетник может сгореть.
Подключаем AIO F4 Flight Controller к компьютеру и проверяем его на работоспособность. Крайне редко но, бывает брак. Да и не забудь подключить антенны перед тем как подключить полетник к компьютеру, без антенн полетник может сгореть.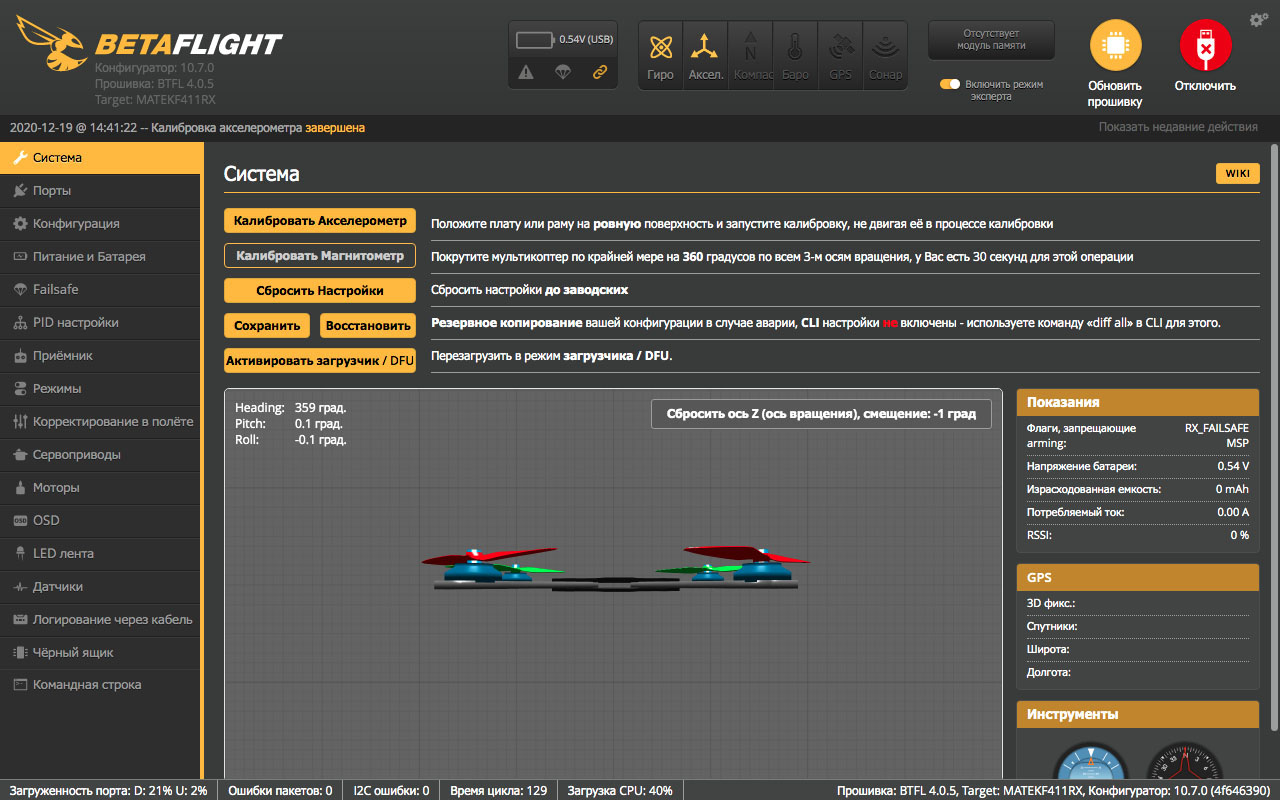 Далее запускай Bataflight Configurator и… у тебя уже все должно быть настроено. Да с завода полетник приходит настроенный, пробегись по пунктам настройки если интересно, а потом отключать и давай паять.
Далее запускай Bataflight Configurator и… у тебя уже все должно быть настроено. Да с завода полетник приходит настроенный, пробегись по пунктам настройки если интересно, а потом отключать и давай паять.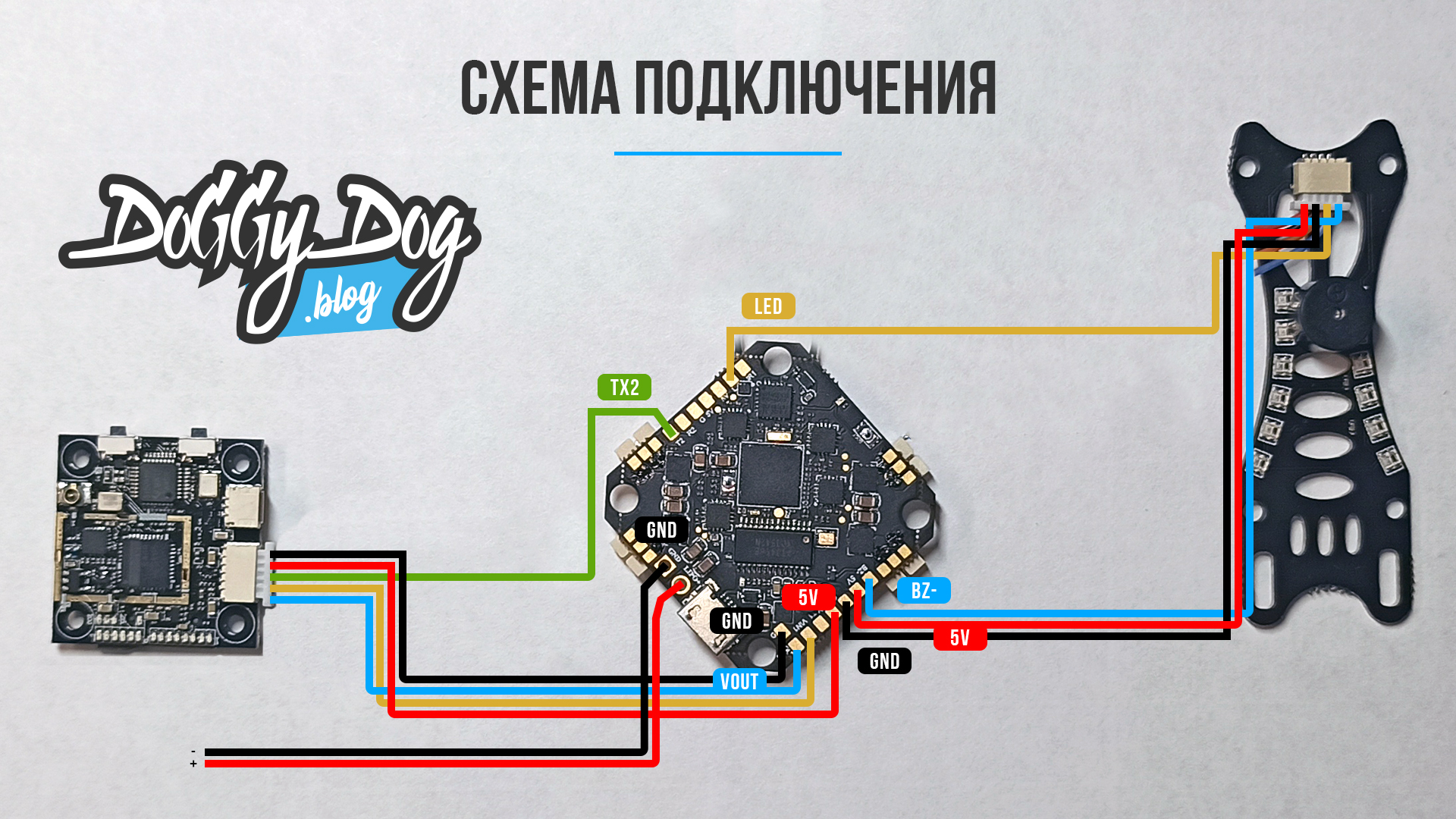 Аккуратно паяем все провода так как показано на схеме. А после проверь не замкнул ли ты контакты. Это важно! Если замкнуть контакты полетник сгорит.
Аккуратно паяем все провода так как показано на схеме. А после проверь не замкнул ли ты контакты. Это важно! Если замкнуть контакты полетник сгорит.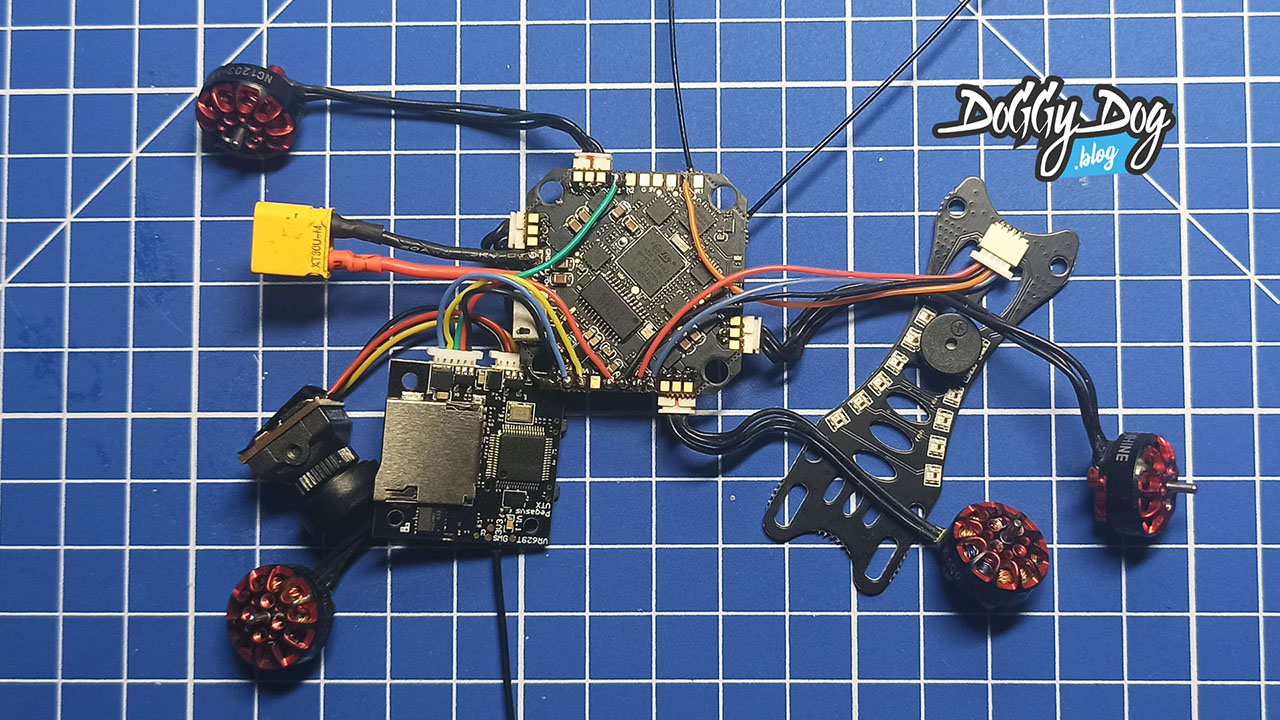 Подключи видео передатчик к полетнику, предварительно установив на видео передатчик антенну из комплекта. Также подключи моторы и верхнюю крышку с пищалкой.
Подключи видео передатчик к полетнику, предварительно установив на видео передатчик антенну из комплекта. Также подключи моторы и верхнюю крышку с пищалкой. 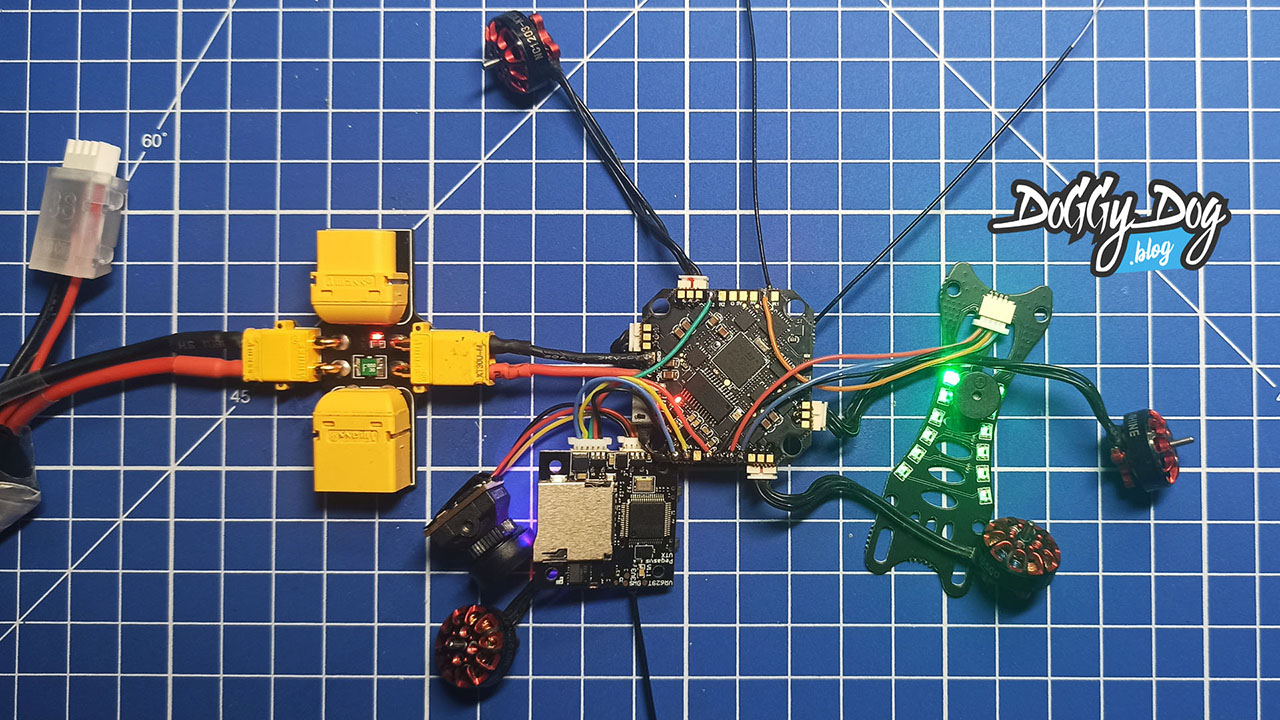 Далее при помощи Smoke Stopper, делаем первый запуск от аккумулятора. Если у тебя нет Smoke Stopper, то очень внимательно проверь свою пайку еще раз. Посмотри не соединил ли ты случайно соседние контакты. А вообще купи Smoke Stopper, ссылка на него в конце поста.
Далее при помощи Smoke Stopper, делаем первый запуск от аккумулятора. Если у тебя нет Smoke Stopper, то очень внимательно проверь свою пайку еще раз. Посмотри не соединил ли ты случайно соседние контакты. А вообще купи Smoke Stopper, ссылка на него в конце поста.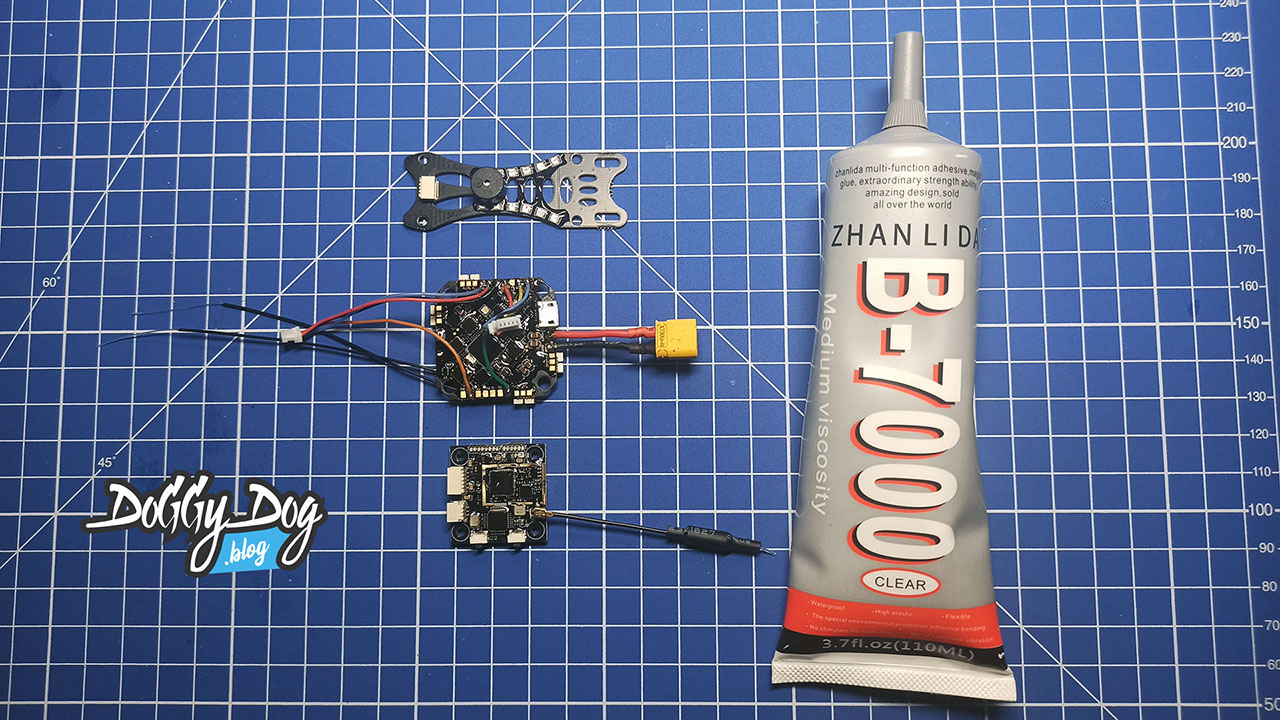 Отключи все компоненты, так будет удобнее гидроизолировать платы. Я использую клей-гель B7000, наношу один слой. Можешь этого не делать, но если ты упадешь в лужу или снег квад скорее всего сгорит.
Отключи все компоненты, так будет удобнее гидроизолировать платы. Я использую клей-гель B7000, наношу один слой. Можешь этого не делать, но если ты упадешь в лужу или снег квад скорее всего сгорит.
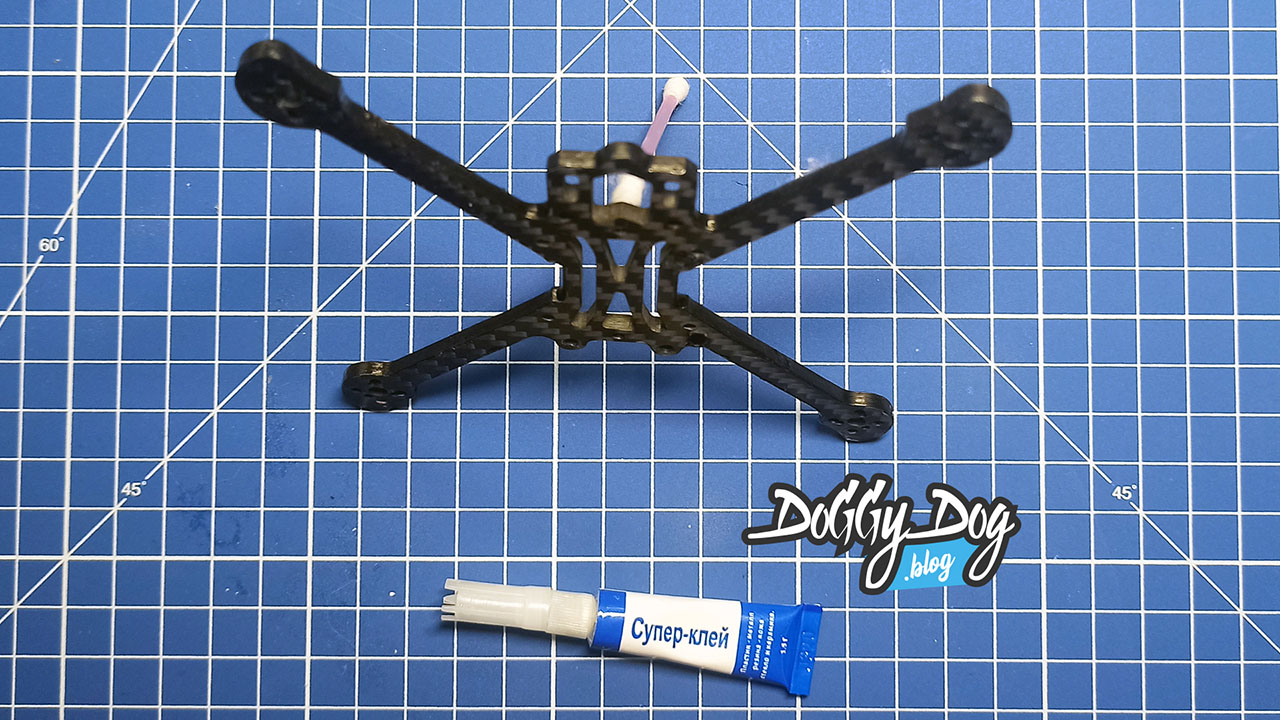 Пока платы сохнут, подготовим раму. Снимем углы по всей раме, а на торце нанесем супер клеем. Это придаст раме более высокую ударопрочность.
Пока платы сохнут, подготовим раму. Снимем углы по всей раме, а на торце нанесем супер клеем. Это придаст раме более высокую ударопрочность.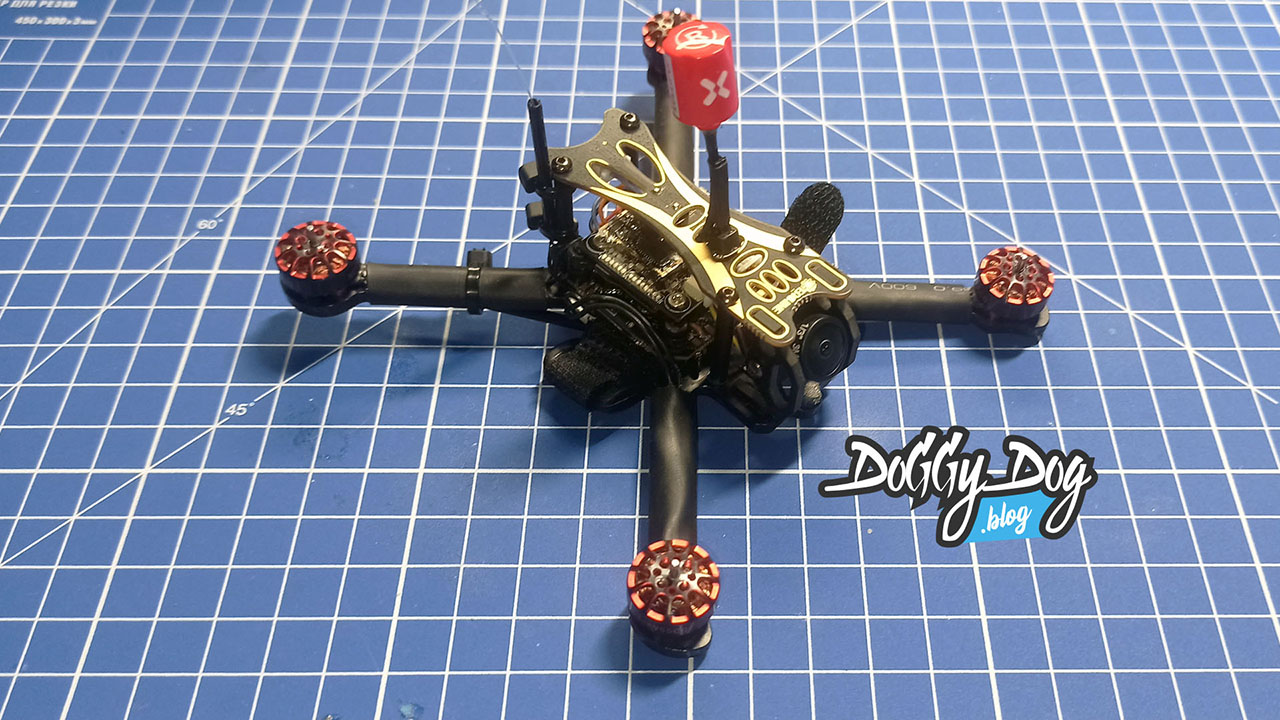 После высыхания собираем все компоненты на раму. При сборке используй фиксатор резьбы, так будет надежнее.
После высыхания собираем все компоненты на раму. При сборке используй фиксатор резьбы, так будет надежнее.
Возможно ты заметил что у меня другая антенна на VTX. Это Foxeer Lollipop, она намного лучше той что идет в комплекте к передатчику. Ссылка на нее в конце поста.
Порт uart в полетном контроллере
Аббревиатура UART с английского расшифровывается как (Universal Asynchronous Receiver/Transmitter) — универсальный асинхронный приемник/передатчик.
К порту UART подключаются различные периферийные устройства, такие как, приемник, различная телеметрия и так далее. У порта есть два контакта для обмена данными — прием и передача.
На фото ниже вы можете увидеть пример UART порта и их настройки в Betaflight, точнее, вы можете назначить в этой вкладке порту любое устройство, которое поддерживает обмен данными:
Процессор полетного контроллера
От процессора будет зависеть то, насколько быстро будут обрабатываться поступающие к нему данные. Процессоры делятся по поколениям: F1, F3, F4, F6. Вот такие странные поколения, где пропущены 2-е и 6-е поколения. Отличаются они частотой работы и архитектурой:
- F1 — 72MHz;
- F3 — 72MHz;
- F4 — 168MHz;
- F7 — 216MHz.
Сейчас все новые полетные контроллеры поставляются с процессором 7-го поколения, так как обрабатывать фильтры и PID становится все труднее, прогресс шагает километровыми шагами в этой сфере. Но у многих пилотов ПК на процессорах 3-го поколения, так как F3 был самым (да и остается) массовым поколением со стабильной работой.
Прошивка и настройка minimosd
Наиболее популярной (но не единственной) прошивкой для MinimOSD является MWOSD. Сначала нужно прошить ей плату, а потом ещё и настроить. Если настроить OSD можно через ПК (подробнее об этом в разделе, посвящённом настройке ПК), то для прошивки необходим FTDI-адаптер или Ардуинка.
#define MINIMOSD#define CLEANFLIGHT
Из параметров выводить на экран я стал только напряжение батареи, время полёта и выбранный полётный режим.
Прошивка и настройка регуляторов
Для прошивки регуляторов у меня тоже есть специальный USB-адаптер, но можно обойтись и без него, подключившись через ПК. Долго думал, ставить Multishot или уже проверенный Oneshot125? С одной стороны, на устаревшем чипе F330 в скорости особой разницы не заметно, с другой — мелодия из «Звёздных войн» при включении и, как пишут на форумах, «более чистый сигнал».
Решили всё неединичные жалобы на то, что моторы стихийно начинают вращаться на максимальных оборотах при подключении к CLI. В итоге поставил BLHeli последней версии (на момент сборки 14.5), включил Damped Light и выставил Motor Timing на «Medium». Позднее откалибровал регуляторы по этой инструкции.
Прошивка полётного контроллера
На этом этапе я застрял дольше всего, так как были проблемы с прошивкой. Оказалось, первый раз шить надо обязательно с замыканием boot-контактов (как в этом видео). Кстати, иногда бывает, что ПК защищён от записи и невозможно прошить новую прошивку. Вот инструкция, как это исправить.
Пожалуй, самой популярной прошивкой на сегодняшний день, вполне заслуженно, является Cleanflight. После её установки достоточно только настроить протокол приёмника и квадрокоптер уже может вполне сносно лететь. Для настройки используется удобная графическая оболочка Cleanflight Configurator.
Благодаря открытому коду прошивки, у неё есть несколько ответвлений (форков). Самым интересным из них является Betaflight от человека под ником Boris B. Прошивка очень динамично развивается и некоторые её «фичи» потом переходят в «родительский» Cleanflight (например, полётный режим Airmode).
Минусом Betaflight является то, что релизы выходят достаточно часто, а стабильность их не всегда высока. Кстати, эта причина на несколько недель задержала написание данной статьи. На момент завершения сборки квадрокоптера как раз вышла версия 2.8.0, которая имела пару ошибок и отличалась недружелюбными дефолтными настройками.
Очень быстро появилась исправленная версия 2.8.1 RC1, но опыт работы программистом подсказал мне, что лучше подождать релиза. Я не прогадал, так как одновременно с релизом версии 2.8.1, появился и Betaflight Configurator. Можно сказать, что это новый этап в истории данной прошивки.
Дело в том, что по мере своего развития Betaflight всё больше и больше отдалялся от Cleanflight и конфигуратор последнего становился всё более и более бесполезным, так как основная часть настроек всё равно делалась через консоль CLI. Кстати, на момент подготовки этой статьи, уже вышла версия Betaflight под номером 2.9.
Прошивки полетного контроллера, их виды
Полетные контроллеры отличаются не только по типу компонентов, из которых они состоят, но и по прошивкам, на которых они работают, то есть программным обеспечением, на котором работает полетный контроллер.
Как уже написано выше, на сегодня самыми популярными прошивками являются:
Что из себя представляет программное обеспечение полетного контроллера — прошивка? Это набор правил и алгоритмов, которые обрабатывает процессор.
А теперь ответ на вопрос, как прошить полетный контроллер? Конкретно для каждой прошивки разработан свой конфигуратор — это специальная программа, которая загружает в полетный контроллер программное обеспечение, а зачем конфигуратор работает в роли графического интерфейса прошивки — чтобы вам было наглядно и удобно настраивать свой квадрокоптер.
Размеры платы полетного контроллера
Монтажная схема полетного контроллера — это расстояние между отверстиями для крепления ПК к раме дрона. В этом вопросе есть стандарт, который состоит из 3 схем:
- 30,5 × 30,5 мм,
- 20 × 20 мм,
- 16 × 16 мм.
Размер платы соответствует размеру дрона, который вы будете собирать, например, 30,5 х 30,5 мм устанавливаются в рамы размером от 200 мм и больше, а на меньшие рамы устанавливаются последующие размеры полетных контроллеров.
Регулятор напряжения (bec)
На современных (да и не только) ПК есть отдельные контакты для подключения источника потребления на 5V и на 12V, иногда встречаются даже на 9. Хоть сейчас почти все FPV-компоненты рассчитаны на ток в широком диапазоне и их можно подключать даже к аккумулятору, мы все же рекомендуем подключать их к отдельному входу на полетном контроллере, где ток подается стабильным, тогда как в аккумуляторе он будет постоянно «скакать» от нагрузки.
Регуляторы оборотов (esc)
Наверняка вы уже слышали или видели регуляторы оборотов 4 в 1, такая квадратная плата вместо 4 плат. Инженеры решили интегрировать регуляторы сразу в полетный контроллер и теперь, если вы купите такой ПК, вам можно будет припаять двигатели напрямую к ПК. О целесообразности такого выбора решать только вам.
Светодиод состояния
Удобная функция, которая отображает текущее состояние полетного контроллера. Обычно у светодиода есть 2 цвета — красный и синий. В зависимости от того, каким и сколько раз мигает ПК — пилот понимает, все ли в порядке. Эта спецификация всегда указывается с конкретным контроллером.
Сколько бывает портов uart на полетном контроллере?
UART портов много не бывает — чем больше, тем более гибко можно будет настраивать ваш квадрокоптер, а также они будут дублировать друг друг в случае поломки.
Но само количество портов зависит от размеров платы полетного контроллера и от того, как расположены на ней компоненты, а также от типа процессора, который использует ПК. 3-е и 4-е поколение полетных контроллеров (F3-F4) имеют от 3 до 5 UART, а 7-е поколение — 7 и более. Оно и понятно, слабый процессор не сможет физически обрабатывать столько периферии.
| F1 | F3 | F4 | F7 |
| 2 UART | 3-5 UART | 3-6 UART | 7 UART |
Типы коннекторов
Это, конечно, не функция, но не рассказать об этом нельзя. На полетном контроллере есть 3 типа соединений между периферией:
- Пластиковые коннекторы
- Контактные площадки для припаивания
- Отверстия для припаивания
Пластиковые коннекторы в основном используются для подключения периферии, которую иногда нужно отключать и снимать, в этом их плюс — быстро снять/подключить. Они не очень прочные, но удобные.
Контактные площадки для припаивания удобны в использовании, но если контакт сильно нагреется во время использования, то есть вероятность, что он оторвется. То же самое и в вопросе о разрыве при сильном натяжении.
Отверстия для припаивания удобны тем, что провод гораздо прочнее будет «сидеть» в пазу. Также можно использовать угловые штифты для более удобного подключения периферии.
Черный ящик (blackbox)
Черный ящик нужен для записи логов работы квадрокоптера, туда записываются всевозможные данные, которые обрабатывает полетный контроллер. Есть два места, куда можно вести запись логов, это флеш-память полетного контроллера и SD-карта (флешка).
Плюсывстроенной флеш-памяти:
- Экономия места,
- Не нужен отдельный разъем.
Минусы встроенной флеш-памяти:
- Маленький размер хранилища,
- Маленькая скорость обмена данными (скачивание логов).
Заключение
Как вы заметили, полетный контроллер — это очень важный узел в квадрокоптере и занимает очень много места в теории. И на вопрос, как правильно выбрать полетный контроллер, у вас не должно оставаться этих самых вопросов, а если остались, вы должны понять, для чего вам нужен квадрокоптер, для каких нужд.
Если для гонок и драйва, то одни контроллеры, если для съемки, то другие. Также стоит учитывать ваши навыки, если вы новичок, то не стоит брать дорогие контроллеры с кучей датчиков или наоборот те, в которых абсолютно ничего не настроено и даже нет прошивки.
Также стоит учитывать бюджет, который вы можете потратить, так как цены очень сильно разнятся. Например, SP Racing F7 с OSD для гоночных дронов стоит от 1600 до 2500 рублей, а вот DJI A3 для профессиональной фото- и видеосъемки стоит 50 000 – 60 000 тысяч рублей.
Подведем итоги:
Выбирать полетный контроллер следует из ваших потребностей – для гонок, для съемки или для автономных полетов, а также, а также, на основе статьи, что написана выше.