

Zmr250 – рецепт приготовления
Данная статья является выжимкой из огромного потока информации изученной на отечественных и зарубежных форумах, просмотренных видео и прочитанных статьях данной тематики.
Привет всем кого заинтересовала тема гоночных квадриков 250 класса.
Сегодня на нашей кухне мы приготовим Миник. Описывать процесс буду на основе . Можно взять любой другой аналогичный, но будут не большие отличия в сборке.

Перед тем как приступить к сборке, предполагается!, что у вас уже есть базовые знания о квадрокоптерах и вы знаете, что такое полетный контроллер, безколлекторный мотор, контроллер оборотов, LiPo аккумулятор и как его заряжать. Имеете опыт работы с паяльником, а также умение поставить на своем компьютере софт и драйвера. В любом случае, будет не лишним почитать .
Следуя этой инструкции вы получите заведомо летающий аппарат. Летные качества которого будут превосходить ваши способности в несколько раз! Что послужит для вас отличной платформой для наработки полетных навыков.
Приступим!
Для сборки нам понадобится:
– ;
– аппаратура радиоуправления, желательно 6 канальная или выше;
– LiPo аккумулятор 3S-1600mah 30C ;
– разъемы для подключения XT60 ;
– винты GemFan 5030 (много!, комплектов 10) ;
– паяльник и паяльные принадлежности;
– хоббийный инструмент (отвертки, кусачки, пинцет, нож и т.п.);
– термоусадка (2, 3, 4мм) , толстый двухсторонний скотч, изолента, стяжки (мелкие и покрупнее), липучка типа репейник.
Шаг 1 – Комплект для сборки ZMR250
Заказываем комплект для сборки и через 20…30 дней получаем вот такую рассыпуху.

В него входят: сама рама ZMR250

4 мотора MT1806 2280KV

4 контроллера моторов Emax Simon K Series 12A

полетный контроллер CC3D Openpilot

плата разводки питания CRIUS Distribution Board

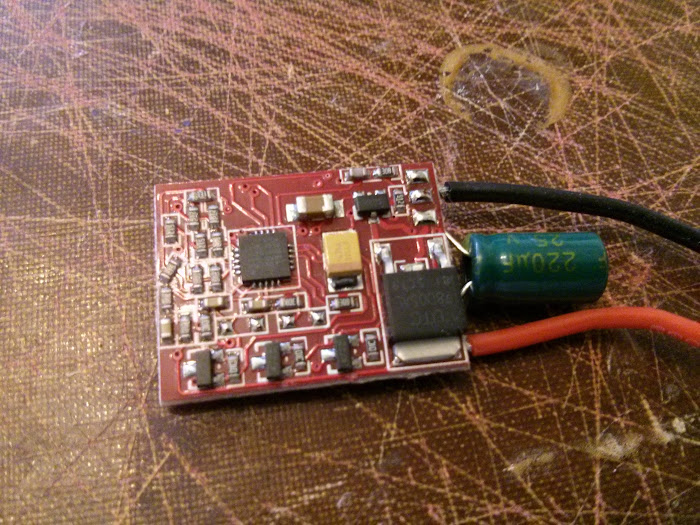
преобразователь постоянного тока UBEC 5V-3A

и мелочевка: вибро-площадка, разъемы, один комплект винтов.
Соответственно, если вдруг у вас еще нет радио аппаратуры, LiPo аккумуляторов и прочего хоббийного оборудования (того же ЗУ для LiPo), заказываем и их.
Шаг 2 – Собираем раму
Сборка рамы не представляет из себя каких либо сложностей. В комплекте есть схема ее сборки. Собираем строго по ней.

Конечно есть варианты ее сборки в нескольких видах, но мы будем собирать по классической схеме.
Устанавливаем моторы, крепятся они винтами идущими в комплекте.
ВАЖНО! Моторы у нас разного вращения! Ставим так, чтобы с белыми гайками стояли на правом-верхнем и левом-нижнем лучах. А с черными гайками на верхнем-левом и нижнем-правом лучах.

Все, рама собрана, приступаем к электронике.
Шаг 3 – подготовка регуляторов
Собирать всю электронику будем на пайке, за исключением полетного контроллера.
Начинаем с контроллеров моторов. Снимаем с них термоусадку, разрезаем ее вдоль по торцу, она потом еще пригодится.

Отпаиваем от них все провода, кроме проводов питания.

У отпаянных сигнальных проводов, удаляем желтую жилу, а красную переставляем в край разъема. Можно конечно просто удалить красную жилу, но тогда останется два отдельных провода. А так, хоть и небольшой, но шлейфик.

По тому что, питать электронику мы будем от самостоятельного преобразователя напряжения и встроенные в регуляторы нам не потребуются.
Подпаиваем сигнальные провода на свои места (уже без провода питания), за одно можно их укоротить по месту, примерно на половину длины.

Повторяем это действие со всеми контроллерами моторов.
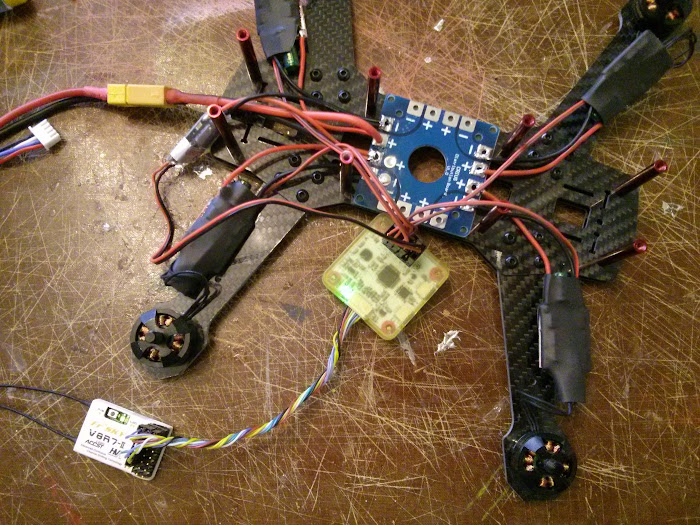
Шаг 4 – установка электроники
Для удобства, снимаем верхнюю пластину рамы, до полной сборки квадрика.
С платой питания ничего сложного делать не требуется. Приклеиваем к ней две полоски двустороннего скотча и крепим по центру рамы.

Я правда еще подпаял силовые провода подключения аккумулятора, но как выяснилось потом – зря. С верху будет крепиться полетный контроллер, а они тут будут мешать.
Подпаиваем провода питания контроллеров моторов.
ВНИМАТЕЛЬНО СОБЛЮДАЙТЕ ПОЛЯРНОСТЬ!!! Если ошибетесь, все сгорит.

Подпаиваем провода моторов к регуляторам. Тут ни какой полярности не соблюдаем, подключаем в любой последовательности.
ВАЖНО! Бывалые товарищи советуют не обрезать провода моторов очень коротко, а оставить запас и свернуть их колечком. Это может спасти моторы в случае жесткого краша.

Подпаиваем преобразователь напряжения (два провода без разъемов, красный плюс, черный минус), это вход, паяем на распределительную плату, провод с разъемом втыкаем в свободный канал блока Output (соблюдаем полярность, но если перепутать ничего страшного не произойдет, просто не заработает).
Устанавливаем разъем для подключения силового аккумулятора, в нашем случае это XT60.
Заворачиваем контролеры моторов в снятую ранее термоусадку (для предотвращения замыкания через углеволокно пластин рамы), подключаем приемник и можно сделать первую проверку, подключив аккумулятор.
Предварительно сверяемся со !!!
Дым не пошел, загорелись светодиоды на полетном контроллере и приемнике, значит все в порядке, продолжаем. Крепим полетный контроллер, двумя полосками двухстороннего скотчя сверху, на плату питания. Сориентировать его надо так, чтобы MiniUSB разъем смотрел в правую сторону.

Фиксируем силовой кабель и преобразователь питания стяжками. Контроллеры моторов изолентой.

Сигнальные провода контроллеров моторов, подключаются по порядку, начиная в левого-верхнего и по часовой стрелке, в разъемы Output 1,2,3,4 соответственно.
Приемник подключаем шлейфом идущим в комплекте с полетным контроллером. На нем 8 проводов, черный – минус, красный – плюс, остальные сигнальные. Подключаем их к приемнику в соответствии с его распиновкой. Главное не перепутать плюс и минус, сигнальные провода можно подключать в любой последовательности.
Все, ставим верхнюю пластину рамы, закрепляем на ней приемник, антенны приемника и липучку для аккумулятора.

Квадрик собран осталось запрограммировать полетный контроллер и настроить аппаратуру.
ВНИМАНИЕ! Винты не ставить до полной настройки полетного контроллера. Они ставятся только после настройки и проверки!
Шаг 5 – настройка полетного контроллера
Полетный контроллер у нас OpenPilot CC3D, для его настройки используется программа OpenPilot Ground Control Station (GCS). Нам нужна версия 15.02. Более новые уже не поддерживают этот контроллер. и устанавливаем на свой компьютер. Есть версии под все распространенные ОС.
На аппаратуре настраиваем нашу модель: имя – ZMR250, тип – авиамодель (не вертолет и не планер), каналы: 1 – элероны, 2 – элеватор, 3 – газ, 4 – рудер, 5 – трех или двухпозиционный тумблер (полетные режимы). Все, больше ничего на аппаратуре настраивать не требуется. Все остальное будет настраиваться в полетном контроллере.
Для настройки полетного контроллера, нам потребуется компьютер с установленной программой OpenPilot Ground Control Statio, USB->MiniUSB кабель, наш собранный квадрик, аккумулятор и аппаратура управления.
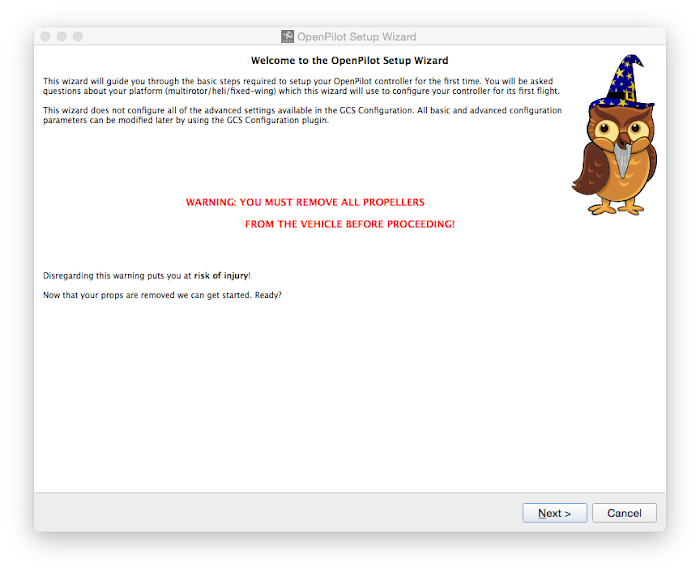
Подключаем квадрик к USB порту компьютера (без аккумулятора), запускаем программу (именно в такой последовательности, это важно). Запускаем визарт настройки (большая зеленая кнопка).

Запускается визарт настройки и в первом окне дает предупреждения, что надо снять винты. Снимаем, если вы их все таки поставили и нажимаем кнопку Next.
На втором экране нам предлагают обновить прошивку. Это действие по желанию, можно обновится, можно пропустить, кнопка Next.

В следующем окне задаются параметры соединения с полетным контроллером. Если вы все следовали моим указанием, то конект уже должен быть, иначе пробуем выбрать из списка нужное соединение и подключить контроллер, кнопка Connect. Подключились, нажимаем кнопку Next.

В следующем окне требуется выбрать вид соединения с приемником: PWM – один провод на один канал; PPM один провод на все каналы; S.BUS для Футабы и ФрСкая; DSM sat – если используется сателлит от Спектрума. В нашем случае выбираем PWM и нажимаем Next.

Теперь выбираем вид нашего устройства, естественно – Мультиротор. Next.

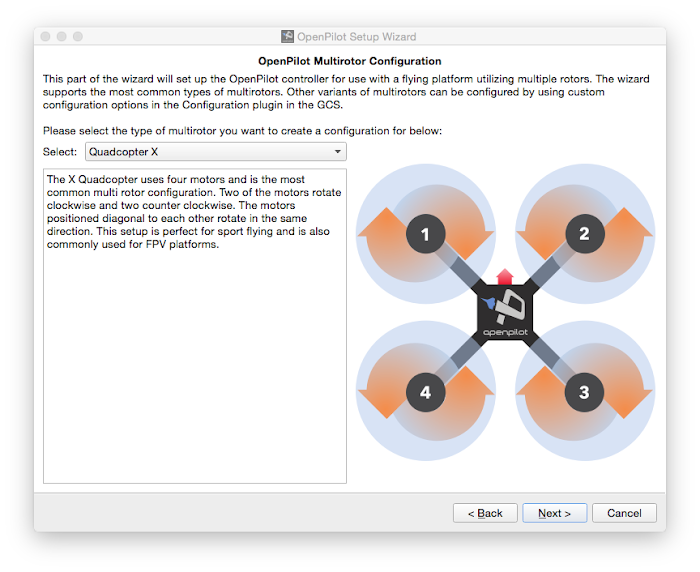
В следующем окне выбираем схему, в нашем случае Quadcopter X, Next.
Потом у нас спросят тип контроллера моторов, выбираем Rapid ESC, жмем Next.

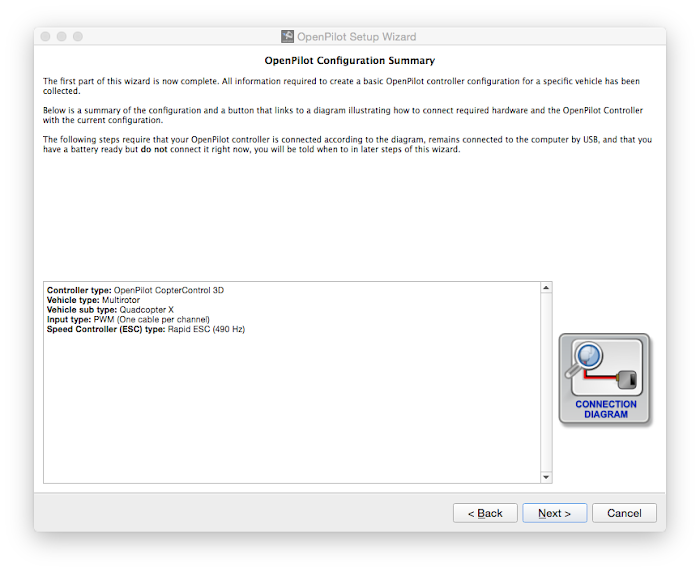
Далее экран с промежуточными результатами, смотрим, что все правильно, нажимаем Next.
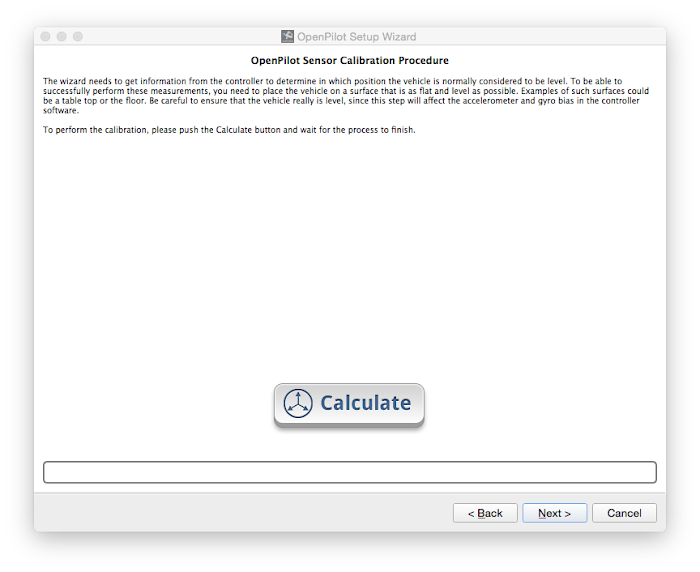
На этом экране проводится калибровка гироскопа и акселерометра. Квадрик нужно выставить на горизонтальной поверхности (желательно ее проверить уровнем), нажимаем кнопку Calculate, начинается процесс калибровки, он идет некоторое время (движется прогрессбар), в этот момент квадрик нельзя шевелить. Процесс завершился, жмем Next.
Далее предлагается откалибровать контроллеры моторов. Требуется отметить галочками, что: все винты сняты; квадрик не запитан, а подключен только по USB; вы прочитали инструкцию (текст над чекбоксами). Ставим галочки – активируется кнопка Start. Нажимаем ее (на все контролеры подается сигнал соответствующий полному газу), подключаем аккумулятор, моторы издают сигналы калибровки, нажимаем Stop (контролерам передается сигнал – газ на минимум), моторы пищат окончание калибровки. Переходим дальше – Next.

На следующем экране нам опять настоятельно рекомендуют снять винты (откуда им взяться), но тем не менее, снимаем, если они вдруг там появились и нажимаем Next.

На этом экране колибруем уровень минимального газа. Нужно нажать кнопку Start и двигать ползунок пока мотор не начнет крутиться. За одно проверяем что он крутится в нужном направлении. Отмечаем если вращается в противоположную сторону, позже мы это исправим. Выставили минимальные обороты, нажимаем кнопку Stop и потом Next.

Таким же образом повторяем процедуру для остальных моторов.
После калибровки всех моторов, нам предлагают выбрать конфигурацию из уже имеющихся. Выбираем из списка ZMR250 Chinese QAV250 clone, жмем Next.

Все, нас поздравляют с окончанием настройки и предлагают сохранить, нажимаем большую кнопку Save, проходит процесс записи, активируется кнопка Next, нажимаем.

Шаг 6 – Настройка аппаратуры
После записи настроек в полетный контроллер, визарт предлагает нам настроить аппаратуру (появится зеленая кнопка), нажимаем. Запускается визарт настройки аппаратуры.
Появится предупреждение, что квадрик переведен в режим Disarmed Always. Отображается экран приветствия визарда (пишут, что в любой момент можно вернуться на шаг назад Back или отказаться Cancel). Нажимаем Next.

Спрашивают тип аппаратуры, выбираем Acro, нажимаем Next.

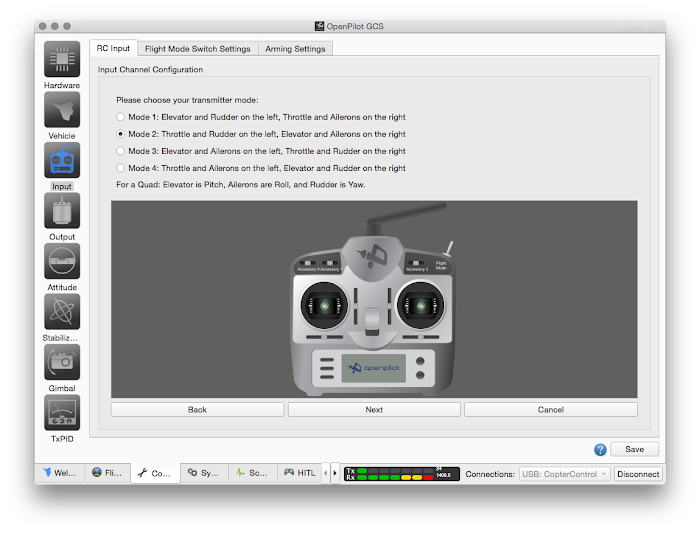
Выбираем конфигурацию стиков – Mode 2 (если летаете в другой моде, выбираете ее любимую), нажимаем Next.
Далее нас будут просить сделать те или иные действия стиками. Таким образом будут определены какие каналы, за что отвечают.
В данном случае, просят установить стики в центральные положения. Ставим в центры и нажимаем Next и так далее (повторяем в точности как показывают на экране).

Далее нас просят подвигать стики в максимальные значения, определяются их минимальные и максимальные значения. Подвигали, нажимаем Next.

На следующем экране просят проверить, что все работает правильно и перемещение стиков соответствует тому, что отображается на экране. Если не так то инвертируем движение стоков соответствующей галочкой. Мне пришлось инвертировать Pitch. Проверили, переходим дальше, Next.

Все, нас опять поздравляют с победой, предлагают еще раз убедиться, что все работает так как надо. Проверяем, нажимаем Next.

Открывается окно с возможностью выбора метода активации моторов, обычно рекомендуют выбрать Рудер вправо. После этого нажимаем кнопку Save (сохраняем настройки).

Все, квадрик и аппа настроены.
Шаг 7 – Осталась пара нюансов!
Первый. Помните, на этапе калибровки минимальных оборотов, требовалось отметить моторы которые вращались не в ту сторону? Пришло время ими заняться. Нужно поменять им направление вращения. Для этого нужно поменять местами два любых провода у этих моторов. Отпаиваем любых два провода мотора от контроллера оборотов, меняем их местами и припаиваем обратно. Мне потребовалось перепаять провода у двух моторов: первому и четвертому.
Второй. При установке полетного контроллера, мы его развернули на 90 градусов, для удобства его настройки. Теперь это надо указать в настройках. Открываем нашу программу настройки, переходим во вкладку Config (закладки внизу), Attitude (левый ряд иконок). В этом окне верхний блок настроек Rotate virtual attitude relative to board в нем поле Yaw, ставим там цифру 90.

После этого можно перейти во вкладку Flight data (закладки внизу), в этом окне отображаются данные с полетного контроллера в реальном времени. Можно пошевелить квадрик, его виртуальное отображение должно в точности все повторять.

Если все так и есть, значит – мы молодцы 🙂
Шаг 8 – Первые тесты
Тест 1. Включаем аппу, подключаем аккумулятор к квадрику. Ждем пока инициализируются контроллеры моторов (пропищат свои сигналы), активируем моторы Рудер в право (на 1 секунду) и пробуем дать газу – моторы синхронно стартуют и четко реагируют на перемещение стика газа.
Тест 2. Берем квадрик в руку, даем половину газа и наклоняем квадрик в сторону любого луча – мотор этого луча увеличивает обороты, также все остальные.
Шаг 9 – Предполетная подготовка
Квадрик настроен и проверен, можно ставить винты. Опять же соблюдаем направление вращения, если еще не запомнили, смотрим скриншот на котором мы вибирали схему нашего Мультиротора, там это наглядно показано.

Заряжаем аккумулятор, берем аппу, квадрик. Проверяем, что все затянуто, провода не болтается. Не помешает взять с собой тестер для аккумулятора (можно будет проверить полетное время). Еще можно захватить с собой небольшую картонку, будем использовать ее в качестве взлетной площадки (с травы взлетать не удобно).
Шаг 10 – Облет
ВНИМАНИЕ!Предполагается, что вы уже имеете навыки управлением квадракоптером (или иным мультироторным ЛА)!
Если навыков нет, их необходимо приобрести заранее! Для этого можно использовать легкий квадрик (например Syma X5 или аналогичный) или компьютерный симулятор (например HELI-X4, AeroSIM-RC или подобные).
Для облета выбираем небольшую поляну, без людей, деревьев, столбов и прочей живности и желательно с мягким газоном. Кладем перед собой нашу картонку (если есть ровная площадка используем ее), ставим на нее квадкрик, включаем аппу, закрепляем и подключаем аккумулятор. Можно пробовать взлетать.
Вот так проходил облет моего экземпляра.
Это самый первый его взлет. Как видите, квадрик абсолютно адекватно реагирует на команды, очень шустрый и динамичный.
А это жесткое тестирование от Макса (maks_dg)
Что дальше?
Дальше – летать, летать и еще раз – летать! Упали, поднялись, отряхнулись, поменяли винты и снова летать. С опытом сами начнете понимать, что нужно поменять или исправить, где подкрутить и под настроить.
Сам квадрик так же можно дорабатывать. Установить на него сигнализатор разряда батареи, пищалку для поиска. Ну и самое главное – FPV оборудование, ведь создан он именно для этого – полеты от первого лица. И не просто полеты, а гонки. Но это уже тема для отдельной статьи!
Спасибо за прочтение! Надеюсь, информация была полезной для вас.
Тема нашего форума для обсуждения миников здесь.

 (LiPo) - 94182PRO")





