

6-ти канальный вертолет, с чего начать?
Я стал обладателем шестиканального вертолета. С чего начать и как на нём летать?
Совет на жизнь, всегда начинайте с изучения руководства пользователя. Радиоуправляемые вертолеты самые травмоопасные для пользователя «игрушки»! Магазин «Моделька» всегда комплектуют свой товар инструкциями или памятками на русском языке! Внимательно прочтите и просмотрите «мануал» до самого конца. Если инструкция на английском языке, а вы им не владеете, любой онлайн-переводчик и вперед. Выбрав в качестве изучения «метод научного тыка», очень скоро будете звонить нам для заказа запчастей.
1) Необходимо зарядить аккумулятор (АКБ).
Внимательно почитав надписи на корпусе зарядного устройства (З/У), вы поймете, что там описаны сигналы световых индикаторов. Подключив З/У к сети чаще мы видим постоянно горящий красный индикатор, который означает, что питание есть и следует подключить АКБ. Если одна лампа загорается другим цветом или начинает мигать при подключении АКБ, то это означает процесс заряда. Если мигают все имеющиеся лампы – имеется неисправность АКБ или З/У – ЗАРЯД СЛЕДУЕТ ПРЕКРАТИТЬ. Новый литий-полимерный (LiPo) АКБ может заряжаться дольше паспортных данных.
К примеру: АКБ LiPo 11.1V 800 mA при данных З/У: 800мА/час при первом заряде может заряжаться до 2-2.5 часов. Обусловлено это низким балансом на банках АКБ при хранении.
НИКОГДА НЕ ОСТАВЛЯЙТЕ БЕЗ ПРИСМОТРА ПРОЦЕСС ЗАРЯДА АКБ.
2) Возьмем пульт в руки и разберемся с управлением.
Запоминаем, что все радиоуправляемые модели работают так: Включаем пульт, включаем модель. И обратно, выключаем модель, выключаем пульт!
Мы не в Америке, поэтому возьмем типичный 6-ти канальный пульт E-Sky с режимом управления MODE2. Левый джойстик должен спокойно ходит вверх-вниз, с фиксацией положения, а при движениях влево-вправо возвращаться в центр. Правый джойстик при любом движении всегда вернется в центральное положение. Режим MODE1 меняет джойстики местами.
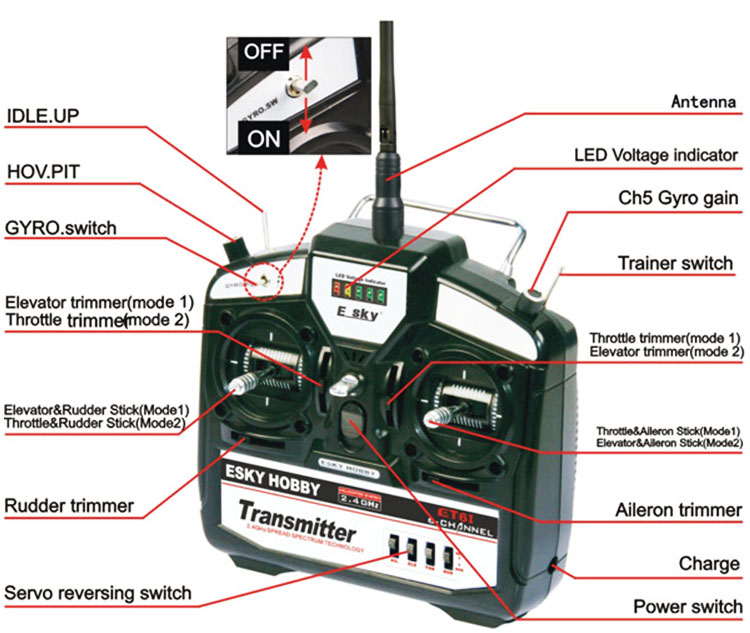
Левыйджойстикуправления (Throttle&Rudder Stick (Mode 2).
При движении влево и вправо управляет положением вертолета относительно оси основного ротора (перпендикулярная плоскость от крепления лопастей). Левый джойстик влево: вращает вертолет против часовой стрелки. Левый джойстик вправо: вращает вертолет по часовой стрелке. Левый джойстик вверх-вниз: набирает-уменьшает высоту соответственно. Левый джойстик в разных режимах работает по-разному!
Правыйджойстикуправления (Elevator&Aileron Stick (Mode 2).
Правый джойстик управляет смещением плоскости ротора в пространстве (циклическим шагом ротора) или проще говоря, осуществляет крен корпуса.
Правый джойстик обычно находится в среднем положении. При перемещении правого джойстика вверх-вниз происходит смещение плоскости ротора вперед и назад соответственно. Это называется управление тангажом/Elevator. Такие действия позволяют летать вертолету вперед и назад.
При перемещении правого джойстика влево и вправо, соответственно плоскость ротора смещается влево и вправо. Это называется управлять креном/Aileron. Такие действия дают возможность летать вертолету в горизонтальной плоскости влево и вправо (при фиксированном положении кабины).
Тумблер IDLE UP.
Переключатель IDLE UP находится на пульте слева, сверху и представляет собой металлический тумблер. Когда этот переключатель находится в положении от себя, если смотреть на пульт сверху, включен режим NORMAL. В таком режиме вертолет имеет подъемную силу только в направлении вверх. С этого режима и следует начинать новичку тренировки базовых упражнений: взлёта, висения, горизонтальных полетов и посадки вертолёта.
Если тумблер перевести на себя включится режим IDLE UP. Внимание! В этом режиме в нижнем и верхнем положении левого джойстика скорость вращения ротора 100%, а в среднем положении 50%. Этот режим рекомендовано включать только в полете и только после того, как вы освоите базовые упражнения. Во избежание травм, порчи вертолета и окружающих вас предметов перед тем, как подключить батарею к вертолету убедитесь в том, что переключатель IDLE UP находится в положении от себя (режим NORMAL).
Режим NORMAL он одновременно управляет газом/Throttle – обороты двигателя и коллективным шагом/Pitch – углом атаки лопастей основного ротора. Когда левый джойстик находится в нижнем положении, газ равен нулю, а угол атаки лопастей равен нулю градусов. Поднимая левый джойстик вверх – мы наращиваем скорость, а угол атаки лопастей начинает увеличиваться. Появляется подъемная сила. Когда левый джойстик находится в среднем положении – газ равен 50% от максимальной скорости вращения ротора, угол атаки лопастей равен 5 градусов. Когда левый джойстик в верхнем положении – газ равен 100% – максимальная скорость вращения лопастей основного ротора, а угол атаки лопастей равен 10 градусов. В таком положении модель имеет максимальную подъемную силу и с высокой скоростью стремится взмыть в небеса.
Режим IDLE UP (пилотажный режим для агрессивных полетов и выполнения фигур 3D-пилотажа): левый джойстик управляет только углом атаки лопастей основного ротора в интервале от отрицательных углов до положительных. Скорость вращения основного ротора колеблется от 50% до 100%. Когда левый джойстик находится в среднем положении, угол атаки лопастей основного ротора равен нулю градусов. Скорость вращения основного ротора равна 50% от максимальных оборотов. Если перевести левый джойстик максимально вниз, угол атаки лопастей будет -10 градусов, а скорость вращения ротора 100%. В таком положении вертолет на максимальной скорости будет лететь вниз. Это позволяет вертолету летать «вниз головой» в инверсном режиме. В крайнем, верхнем положении джойстика, угол атаки лопастей основного ротора будет равен 10 градусов, а скорость вращения ротора 100%. В таком положении вертолет на максимальной скорости летит вверх.
Левая ручка HOV.PIT
Как уже выше описано, левый джойстик управляет как газом (обороты двигателя), так и коллективным шагом (углом атаки лопастей основного ротора). Также мы знаем, что в разных полетных режимах левый джойстик имеет разные параметры угла атаки лопастей. В режиме NORMAL угол меняется от 0 до 10 градусов. В режиме IDLE UP диапазон шире, от -10 до 10 градусов.
Левая ручка HOV.PIT позволяет смещать эти отрезки, как в положительную, так и в отрицательную сторону. В нулевом положении углы остаются стандартными. Если немного сместить ручку против часовой стрелки – все углы в обоих режимах сместятся в сторону отрицательного угла на пару градусов. Например: в режиме NORMAL будет диапазон углов от -2 до 8 градусов. А в IDLE UP получится от -12 до 8.
На практике данную настройку можно использовать в зависимости от внешних, погодных условий. В случае поворота ручки HOV.PIT немного влево от нулевого положения, появятся небольшие отрицательные углы, что удобней при полетах в ветреную погоду, так как в режиме NORMAL, это позволит вертолету уверенно снижаться. При полетах в зале или другом закрытом помещении, повернув ручку HOV.PIT немного вправо от нулевого положения, модель будет взлетать, висеть на меньших оборотах двигателя.
ВНИМАНИЕ! Данной настройкой могут пользоваться только уверенно летающие пилоты, которые понимают, в каком случае требуется смещение интервала углов. Новичкам строго рекомендуется выставлять этот параметр в исходное, нулевое положение. Если постоянно смещать интервалы углов в процессе освоения вертолета, каждый ваш полет будет как в первый раз. Изменение интервала углов влияет на управляемость модели, не торопитесь трогать эту ручку. Перед началом полета убедитесь, что ручка HOV.PIT находится в нулевом положение.
Левый тумблер GYRO.SW(Switch)
Тумблер GYRO.SW служит для переключения функции гироскопа Heading Hold – удержание балки. Основной ротор вертолета вращается по часовой стрелке, реактивный момент вращает корпус вертолета против часовой стрелки. Для компенсации этого вращения есть хвостовой ротор, который компенсирует обратную силу вращения корпуса. Хвостовой ротор связан ременной, зубчатой передачей с основным, либо имеет отдельный мотор. Для того чтобы положение хвостовой балки оставалось неизменным на вертолет установлен гироскоп с функцией удержания положения хвостовой балки Heading Hold. Эта функция позволяет удерживать положение кабины вертолета независимо от скорости вращения основного ротора, ветра, положения вертолета. Тумблер GYRO.SW отвечает за включение и отключение данной функции.
ВНИМАНИЕ! Данной настройкой рекомендуется пользоваться продвинутым пилотам. Перед началом полета убедитесь, что тумблер GYRO.SW находится в положении от себя.
Правая ручка GYRO Gain
Правая ручка GYRO Gain отвечает за чувствительность гироскопа. Следует установить среднее положение ручки для начала настройки. Если при фиксировании левым джойстиком нужного вам положения корпуса, вертолет продолжает вращение, следует увеличить чувствительность гироскопа. Для этого поверните правую ручку немного по часовой стрелке в cторону GYRO Gain ( ).
Если хвостовая балка дергается влево-вправо при полёте, следует уменьшить чувствительность гироскопа, повернув ручку GYRO Gain немного против часовой стрелки в сторону GYRO Gain (-).
Следует производить настройку чувствительности до максимально стабильного положения корпуса в полёте и удержания вертолёта в той позиции, которую вы задаёте, двигая левый джойстик влево или вправо. Ручку GYRO Gain следует вращать на 2-3 градуса за один раз, чтобы не потерять точность настройки.
Правый тумблер Trainer Switch
Данный тумблер предназначен для управления одной моделью, двумя связанными кабелем пультами одновременно. Идеальный вариант для страховки ученика при первых полётах, второй пульт находится в руках инструктора-тренера. Кабель для связывания пультов называется «тренер-ученик». Пока инструктор держит нажатым тумблер на себя – управляет ученик. А в экстренных ситуациях переключает тумблер от себя и сразу же активным становится его пульт.
Servo Reversing Switch (4 реверсных переключателя)
В нижней лицевой части пульта имеются 4 переключателя, предназначенные для изменения направления движения сервоприводов и газа. При включении реверса на соответствующем канале управление по каналу становится прямо противоположным. Тоже касается и реверса газа, при включении реверса, нижнее положение левого джойстика будет означать максимальный газ. Данные настройки могут понадобиться в случае установки других сервомашинок, направление движения которых могут отличаться от штатных, а также в случае использования пульта с другой радиоуправляемой моделью.
ВНИМАНИЕ! Данной настройкой рекомендуется пользоваться продвинутым пилотам. Рекомендуем оставить базовые положения реверсов указанных в инструкции.
Четыре ползунка по бокам и снизу от левого и правого джойстика – Trimmer
Ползунки, которые находятся сбоку или снизу от левого и правого джойстика называются триммерами тонкой настройки. Если ваша модель настроена не идеально и его в легкой степени ведет в какую-либо сторону, для достижения стабильного положения вертолета в полёте нужно сместить соответствующий ползунок в обратном (компенсирующем) направлении.
Throttle Trimmer (справа от левого джойстика): триммер газа – должен быть в минимальном положении. При смещении вверх, делает постоянным вращение основного ротора, будто вы сместили левый джойстик немного вверх.
Rudder Trimmer (снизу левого джойстика): триммер вращения относительно оси основного ротора. Если при висении вертолет слегка вращает вокруг оси, следует сместить триммер в обратную вращению сторону до стабильного положения модели.
Elevator Trimmer (слева от правого джойстика): триммер наклона корпуса вперёд-назад, тангаж. Если при висении вертолет слегка тянет вперед или назад, следует сместить триммер в противоположную смещению сторону до стабилизации модели.
Aileron Trimmer (снизу правого джойстика): триммер крена корпуса влево-вправо. Если при висении вертолет слегка тянет влево или вправо, следует сместить триммер в противоположную смещению сторону до стабилизации модели.
ВНИМАНИЕ! Допустимо для всех вертолетов с хвостовым ротором небольшое смещение влево. Это нормальное, физическое явление поэтому при взлете и висении нужно слегка придерживать вправо правый джойстик. Если попытаться компенсировать это смещение триммером крена, это создаст постоянный крен вертолета вправо, что скажется на полёте.
Мой первый полёт! Что делать?
Получив опыт на виртуальном симуляторе, прочитав теорию, следует прикупить тренировочное шасси, которое хорошо спасает на начальном этапе.
1. Выбираем ровную площадку без деревьев, столбов, прохожих, детей и животных. Любой наблюдатель должен стоять позади пилота. Безветренная погода обязательна при первых запусках.
Лучше выбрать большое поле с высокой травой, которая может спасти вертолет от первой аварии. Организовать взлётную площадку: минимум метр на метр, плотного покрытия (щит, лист металла, коврик). Полёты в закрытых пространствах должны происходит в просторных помещениях с высокими потолками (спортзал, ангар, цех).
ВНИМАНИЕ! Конечно, можно не слушать моего совета, но от лица всего коллектива магазина «Моделька» прошу не делать попытки пилотирования у себя дома. Как показывает практика, 98 человек из 100 крайне негативно отзывается о первом знакомстве с вертолетом в домашних условиях. Остальные двое просто не смогли подключить модель. Сломанные лопасти в лучшем случае, порча мебели, осветительных приборов и серьёзных телесных увечий в худшем.
2. Контрольная проверка.
-Полностью заряженный аккумулятор вертолета.
-Индикатор заряда батареек на пульте в зеленой зоне.
-Тумблер IDLE UP в положение N, от себя (режим Normal).
-Тумблер удержания балки GYRO.SW в положение от себя – 0.
-Левая ручка HOV.PIT в среднем положение.
-Триммеры находятся в центральном положении, кроме триммера газа, который должен быть в нижнем положении.
-Правая ручка GYRO Gain в среднем положение.
-Левый джойстик газа в нижнем положение
-Включаем пульт управления и откладываем его в сторону.
-Устанавливаем тренировочные шасси, если есть.
-Аккуратно снимаем кабину.
-Устанавливаем аккумулятор до фиксирующего упора и закрепляем с помощью липучки.
-Ставим вертолет на шасси, подключаем аккумулятор и ждём 15-20 секунд. Происходит инициализация гироскопа. Если подвигать вертолет, то лопасти хвостового ротора будут менять положение.
-Устанавливаем кабину, проверяем, чтобы ничего не соприкасалось с шестерней двигателя.
-Расправляем лопасти и устанавливаем вертолет на взлетную площадку хвостом к себе.
-Проверяем работу сервоприводов (3шт) и работу двигателя, слегка подняв ручку газа и вернув в нулевое положение.
Теперь можно переходить к практическим занятиям. Важно понять всё вышенаписанное и перечитать еще раз, если есть сомнения. Удачных полетов.
Авторотация (hold)
Авторотация является спасательным жилетом вертолета, а для опытного пилота – еще и очень зрелищной фигурой пилотажа. Но поскольку отключать двигатель перед каждой авторотацией не слишком-то интересно, был придуман еще один режим – Hold. Смысл его очень прост – в данном режиме двигатель работает на холостых оборотах и обгонная муфта главного ротора (или связки роторов) и двигателя разблокирована.
При обучении возможна и обратная процедура: при неудачном заходе на посадку в режиме авторотации вы можете переключиться в другой полетный режим и продолжить полет.
Для чего предназначен этот режим и что в нем можно делать?
Кривая шага:
Обратите внимание: кривая имеет большой отрицательный шаг в нулевом положении ручки. Это связано с тем, что для поддержания необходимых оборотов главного ротора набегающим потоком необходимо значение шага -6 градусов, а в некоторых вариантах и более.
Центральная точка кривой шага находится чуть выше 0 – для комфортного торможения и посадки. Для выполнения 3D фигур в режиме авторотации рекомендуется устанавливать углы в центральной точке 0 градусов. И, конечно, максимум по положительному шагу – чтобы полностью использовать энергию ротора.
Горизонтальные развороты
Рассмотрим явления, происходящие с вертолетом при выполнении разворотов в горизонтальном полете. При выполнении разворота вертолет накреняют.
На рисунке 10 показан вид вертолета, выполняющий горизонтальный полет с правым креном. Обратите внимание, что вектор подъемной силы несущего винта по прежнему перпендикулярен диску вращения. Вектор силы веса остается перпендикулярен поверхности земли.
Это хорошо видно на рисунке 11. Обратите внимание, что при наклоне вертолета вправо, никаких изменений в величине подъемной силе несущего винта не произошли. Т.е., длина вектора подъемной силы остается постоянной. Раскладывая вектор общей подъемной силы несущего винта, мы видим, что вертикальная составляющая вектора на рисунке 11 теперь меньше веса.
Если подъемная сила меньше веса, то вертолет снизится. Но, когда выполняете горизонтальный поворот, вы несомненно не хотите, чтобы вертолет каждый раз снижался. Поэтому, когда вы входите в поворот, необходимо увеличивать общий вектор подъемной силы, пока его вертикальная составляющая не сравняется с весом.
Это снова уравновесит все силы (по крайней мере в вертикальном плане). Но как и насколько увеличить общую подъемную силу? Вводя вертолет в горизонтальный поворот, полная подъемная сила повышается поднятием носа вертолета для увеличения угла атаки диска несущего винта.
Степень увеличения подъемной силы или перемещения ручки управления тангажем зависят от характеристик вертолета и от угла крена. Если вы сильно задерем нос вертолета, то он будет подниматься и, очевидно, что недостаточный подъем носа должен вызывать снижение модели.
Кроме того необходимо учитывать другой важный момент. Угол отклонения руля управления тангажем для поддержания горизонтального полета в согласованном повороте зависит от угла крена вертолета. При больших углах крена (более 60 градусов) вертикальная составляющая подъемной силы, противодействующая силе веса вертолета будет еще меньше.
В этом случае, любой угол отклонения ручки управления тангажем “на себя” будет добавлять подъемную силу к весу модели. Тем не менее, есть случаи, когда это очень необходимо, например, в момент выполнения второй половины петли или любого другого нисходящего вертикального маневра.
Из этого простого объяснения, я думаю вы поймете, что крен очень важен на выполнения горизонтальных разворотов. При большом крене требуется большего отклонения ручки управления тангажем модели для поддержания горизонтального полета без потери высоты.
В заключение, при выполнении горизонтальных разворотов, необходимо учитывать направлением вращения основного ротора. Не останавливаясь на причинах, скажу, что вертолет с вращением ротора по часовой стрелке очень легко разворачивается вправо, а с винтом, вращающимся против часовой стрелки, влево, практически без вмешательства управления хвостовым винтом.
Как настраивается модель вертолета
Установка углов атаки лопастей на модели вертолета – очень ответственная процедура. Для настройки понадобятся:
- Конечно же, сама модель вертолета, с корректно настроенной механикой.
- Измерительная линейка или, в случае отсутствия специального измерителя, -транспортир.
- Аппаратура радиоуправления.
- Очень желателен кабель для непосредственного подключения приемника к аппаратуре (DSC-кабель), чтобы не засорять эфир ненужным сигналом.
Теперь приступаем к настройке углов атаки лопастей.
Установим модель вертолета так, чтобы ротор мог свободно вращаться, а лопасти при этом находились на уровне глаз.
Фиксируем сервоось (ось серволопаток) так, чтобы она была параллельна хвостовой балке и перпендикулярна оси ротора. Если зафиксировать ее невозможно, то перед каждой регулировкой будем выравнивать сервоось заново.
- Цапфа крепления лопасти
- Сервоось
- Стопор сервооси, специально разработанный для моделей фирмы X-cell
Устанавливаем измерительную линейку на лопасть. В случае деревянных лопастей – на расстоянии 80 мм от комля, а в случае пластиковых или карбоновых – 80 мм от конца лопасти. Данное правило связано с тем, что деревянные лопасти подвержены крутке, которая обычно меняется в полете.
Убеждаемся в том, что механика собрана правильно, следующим образом. При установке в аппаратуре кривой шага в 0 градусов и ручке газа в среднем положении линейка должна показать угол, равный 0, для этого очень удобно использовать полетный режим Idle1.
Поворачиваем ротор, переставляем измеритель углов и проверяем угол атаки противоположной лопасти. Если он не равен нулю – настраиваем механику. Для того, чтобы измерить угол, необходимо выровнять базисную поверхность линейки с сервоосью, после чего на линейке и будет указано значение угла атаки лопасти.
Устанавливаем газ в минимальное положение и меняем кривую шага в данной точке пока линейка не покажет нужный угол. Затем передергиваем ручку газа (верх, вниз), чтобы выбрать люфты и измеряем снова. Так повторяем, пока не установим необходимый угол. Данную процедуру установки углов лопастей проводим для каждой заданной точки кривой шага, в случае прямолинейной возможна проверка в крайних и центральной точке.
После установки углов кривой шага можем начать установку кривой газа. К сожалению, никак нельзя проверить ее правильность, кроме как в реальном полете. Желательно проверить, что игла карбюратора совершает правильное, согласно заданной кривой, движение – особенно это важно при 3D настройках.
Далее, если необходимо, производим настройку других полетных режимов. При этом тщательно проверяем установленные углы – обязательно на обеих лопастях.
Как научиться управлять радиоуправляемым вертолетом
Вертолеты на радиоуправлении – это не просто детские игрушки. Моделированием увлекаются и взрослые, посвящая своему хобби массу свободного времени. Научившись обращаться с радиоуправляемым вертолетом, вы не только разнообразите свой досуг, но и сможете принимать участие в увлекательных летных соревнованиях.
Как видите, научиться управлять вертолетом просто. Главное – терпение и постепенность!
- Начните с простой модели.
Для первых тренировок лучше выбирать самые простые модели вертолетов. Ведь более сложные рассчитаны на профессионалов, и новичок рискует с ними не справиться. Еще один аргумент в пользу выбора простой модели – ее низкая цена. Процесс обучения связан не только с взлетами, но и с падениями, любое из которых может стать для вашего вертолета последним. Согласитесь, что расстаться с дешевой моделью будет гораздо проще, чем с дорогой. - Тренируйтесь на просторе.
Квартира, заставленная мебелью, не лучшее место для тренировок. Чтобы освоить управление вертолетом потребуются свобода и простор. Выбирайте большие помещения без препятствий, или тренируйтесь в безветренную погоду на улице. И не забудьте проверить уровень заряда аккумулятора. - Освойте взлет.
Правильный взлет – первое, чему следует научиться. Скорость движения винтов наращивают до того момента, пока вертолет не взлетит в воздух. Недостаточная скорость приводит к заваливанию вертолета набок, слишком высокая – провоцирует столкновение модели с потолком. Ваша цель – научиться определять оптимальную скорость движения винтов. - Освойте посадку.
После удачного взлета, вы можете заставить вертолет зависнуть на определенной высоте, просто уменьшив скорость вращения его лопастей. Продолжая снижать скорость, вы заставите модель сесть на землю. В случае потери контроля над вертолетом, просто остановите его винты, и он упадет. Повреждения от падения обычно менее серьезны, чем последствия столкновения с каким-нибудь препятствием. - Освойте перемещения и развороты.
Научившись удерживать вертолет в воздухе, начинайте осваивать перемещения вперед-назад. Пролетев на метр вперед, остановитесь, и попробуйте по той же линии пролететь назад. Когда вы освоите и это упражнение, переходите к разворотам на 180 градусов. Заставьте вертолет долететь до определенной точки, затем развернуться, и лететь обратно.
Как видите, научиться управлять вертолетом просто. Главное – терпение и постепенность!
Предисловие
Радиоуправляемые модели вертолетов пользуются широкой популярностью во многих странах мира. Им не нужны аэродромы, их полет вызывает большое восхищение у публики. По своим летным возможностям модели вертолетов обогнали полномасштабных “собратьев”. Это направление в спортивном моделизме возникло в начале 70 годах и очень быстро развивается.
На современном этапе модели вертолетов создаются с использованием современных композитных материалов, достижений микроэлектроники и компьютерных технологий. Например, появление компьютерных тренажеров, существенно повлияло на методики освоения непростого управления радиоуправляемых вертолетов.
Как свидетельствует практика, уровень развития моделизма определяется уровнем жизни населения. И хотя наша жизнь в странах СНГ не способствуют бурному развитию спортивного моделизма, у молодежи есть определенный интерес к этому увлечению. В настоящее время появилась возможность, при наличии средств, приобрести необходимое оборудование и материалы, радиоаппаратуру и аккумуляторы, двигатели и топливо и т.п.
Но, к сожалению, за редким исключением, все выше перечисленное – импортное и дорогое. Большой объем информации по моделизму, в частности и по радиоуправляемым вертолетам, можно найти в Интернете, в зарубежных изданиях. Появились в Интернете и русскоязычные сайды по моделизму.
Однако, по-прежнему мало широкодоступных информации на русском языке для моделистов по радиоуправляемым вертолетам, в которых бы в доходчивой форме были изложены теория вертолета, особенности его регулировок с использованием функций современной радиоаппаратуры, методики освоения полетов от висения до высшего пилотажа.
Рысканья вертолета
Одна из причин, по которой мы покупаем радиоаппаратуру для вертолета (вместо радиоаппаратуры для самолета), заключается в необходимости дополнительных функций управления моделью вертолета, что значительно облегчает пилотирование. Это не говорит о том, что вы не можете использовать радиоаппаратуру от моделей самолетов для пилотирования вертолетом (по крайней мере на начальном этапе), просто с радиоаппаратурой для вертолета легче обучаться пилотированию.
Для того, чтобы лучше понять функцию компенсации рысканья хвостовой балки, посмотрите на рисунок 3, на котором вертолет показан сверху. Обратите внимание, что лопасти ротора вращаются двигателем по часовой стрелке и, поскольку, для каждого действия есть равное противодействие, нос вертолета будет поворачиваться влево (против часовой стрелки). И по этой причине вертолету нужен ротор хвоста для компенсации реактивного момента от вращения лопастей.
Теперь представим себе вертолет в позиции висении (когда все силы сбалансированы) и мы хотим подняться. Для этого увеличивают коллективный шаг лопастей ротора, чтобы увеличить подъемную силу винта. Следовательно увеличивается вращающий и реактивный моменты, а нос вертолета будет поворачиваться влево.
И мы должны делать это вручную, каждый раз, при изменении вращающего момента (при подъеме или снижении вертолета) и тратить много времени и усилий для управления хвостовым ротором, чтобы удерживать нос модели прямо. По этой причине функция компенсации рысканья хвостового ротора сделает наш полет легче.
В большинстве радиоаппаратуры (по крайней мере, недорогой) предполагается, что вертолет находится в висении, когда ручка управления дросселем и коллективным шагом находиться в среднем положении, а снижение и подъем происходит, если ручка перемещается из этой точки.
Две кнопки (программа для компьютерной радиоаппаратуры), одна для подъема, а другая для снижения, используются, чтобы отрегулировать величину компенсации рысканья хвостового ротора при отклонении ручки управления от средней позиции при висении. По мере того, как ручка перемещается для подъема вертолета вперед, автоматически добавляется величина шага хвостового ротора (и, аналогичным способом, шаг хвостового винта уменьшается, когда для снижения вертолета, ручка управления переводится в позицию ниже средней).
Это автоматическое воздействие на шаг хвостового рота в течение подъема и снижения помогает удерживать нос вертолета прямо и существенно уменьшает нашу нагрузку при пилотировании модели. Для регулировки компенсации “вверх”, поднимайте вертолет из висения и смотрите направление перемещения носа.
Если нос перемещается влево в течение подъема, компенсация хвостового ротора недостаточная, поэтому увеличьте немного величину компенсации “вверх” и повторите попытку, делайте небольшие изменения, до тех пор, пока нос станет удерживаться прямо в течение подъема. Аналогичным способом, имеется в виду перемещение нос в течение снижения, регулируется компенсации “вниз”.

