

Что такое БПЛА?
БПЛА или беспилотник, это машина, которая может быть поднята в воздух и управляема дистанционно с помощью компьютера или пульта управления. Как следует из названия, он является беспилотным, подразумевая, что не имеет на борту пилота, штурмана, или инженера.
На сегодняшний день, БПЛА могут иметь миниатюрные габариты, легкие и маневренные, они способны выполнять небезопасные для человека задания. Некоторые из них предназначены для работы в закрытых помещениях, например — тоннели, канализационные трубы и т.д.
Они имеют высокую ремонтопригодность, в отличие от традиционных вертолетов, есть только одна движущаяся часть — ротор. Остальная часть машины является статическим элементом. Таким образом, квадрокоптер имеет гораздо более упрощенный дизайн, чем подобные летательные аппараты. Большинство малых квадрокоптеров используют корпус, имеющий защиту роторов и лопастей.
В случае контакта с препятствиями, что делает их более прочным по сравнению с другими БПЛА. Квадрокоптеры используют более короткие лопасти, чем у вертолета. Несущие винты работают на низких скоростях, вызывая меньший коэффициент трения. Это позволяет признать, что квадрокоптер является более безопасным, для использования в сложных полётных ситуациях, чем другие летательные аппараты.
Немного истории и перспективы развития беспилотников
Квадрокоптер (он же квадролёт, англ. Quadrotor, quadrocopter, четырёхроторный вертолет) —
это летательный аппарат с четырьмя несущими винтами, вращающимися диагонально в противоположных направлениях.
Обобщённое название аппаратов подобного типа, с произвольным количеством роторов — мультикоптер.
Многовинтовые вертолёты разрабатывались ещё в первые годы вертолётостроения.
Недостатком этих аппаратов была сложная трансмиссия, передававшая вращение одного мотора на несколько винтов.
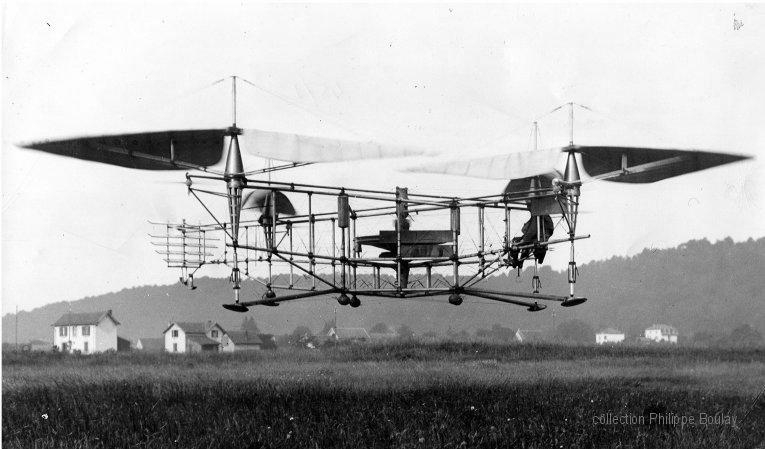
О летающем механизме под названием «квадрокоптер» впервые заговорили в 1922 году, когда в
Дейтоне (США) поднялся в воздух вертолет с четырьмя винтами, рисунок 1.
Рисунок 1 – Первый квадрокоптер
Впоследствии он совершил около 100 полетов, но в серийное производство так и не пошел:
изобретение попросту опередило свое время – производить столь сложные летательные аппараты в
ту пору было технологически нецелесообразно. Автор проекта Георгий Александрович Ботезат,
несмотря на успех, к винтокрылым машинам больше не возвращался.
Вновь о квадрокоптерах вспомнили в 1950-х, однако дальше прототипов дело не продвинулось,
хотя уже тогда их позиционировали как беспилотные аппараты.
Несмотря на прохладное отношение со стороны большой авиации, квадрокоптеры снискали популярность
среди авиамоделистов: простота в постройке и наладке, возможность серийного изготовления простых и
недорогих узлов для сборки, появление микроконтроллеров (упростивших управление) сделали их доступными каждому [1].
Квадрокоптеры удобны для недорогой аэрофото- и киносъёмки — громоздкая камера вынесена из зоны действия винтов.
Двухвинтовые вертолёты к квадрокоптерам, как правило, не относят [2].
Первые дроны появились в конце 1990-х годов. Тогда они были похожи на миниатюрные вертолеты и были спроектированы компанией Flying-Cam для съемок фильмов, в том числе для фильмов о Джеймсе Бонде. Flying-Cam за свои достижения получили 2 Оскара в 1995 и 2014 году.

Первые дроны, несомненно, были приемлемым вариантом для фотографов и режиссеров, но аренда такой аппаратуры стоила очень дорого. А соорудить какое-либо подобие квадрокоптера, не будучи инженером, было практически нереально.
Но уже в начале 2000-х развитие дронов начало набирать обороты: в Китае энтузиастами была создана компания DJI, которая создавала беспилотные аппараты практически из всего, что было под рукой, а в 2010 году во Франции были презентованы первые коммерческие модели дронов.
Сегодня компания DJI владеет около 50% всего потребительского рынка беспилотников, а ее основатель Фрэнк Ван Тао входит в сотню самых богатых людей мира.
2016 год был действительно прорывом в истории квадрокоптеров. Год начался с яркого представления нового дрона от DJI — Phantom 4, который вобрал в себя массу новых функций, в первую очередь, уклонение от препятствий: дрон ощущает окружающие предметы и останавливает полет, если посчитал, что авария неизбежна.
Популярность DJI не давала покоя еще одной компании с мировым именем – GoPro, которые в ответ выпустили своего беспилотника – Karma. Это портативный дрон, который всегда удобно взять с собой благодаря своей компактности. Из-за этого Карма стала популярной моделью среди путешественников и тех, кто привык к активным съемкам.
Не желая отставать, уже через неделю DJI выпустили свой складной квадрокоптер DJI MAVIC, который стал еще меньше и быстрее, чем аналог от GoPro. Кроме того интересной стала новая функция – управление жестами. Теперь оператор может буквально управлять дроном в небе простым взмахом руки.
В целом вертолеты с несколькими винтами разрабатывали еще в начале вертолетостроения. Попыток создать многовинтовой вертолет было много, но первый квадрокоптер, который смог взлететь и держался в воздухе, был разработан Георгием Александровичем Ботезатом (русско-американский конструктор). Испытания конструкции проходили в 1922 году.
У первых аппаратов был один недостаток: вращение мотора передавалось сразу на 4 винта. После того как был создан автомат перекоса и хвостовой винт разработка и испытания квадрокоптеров завершились. В 1950-х годах начали проводиться новые разработки, но успехов достигнуть так и не удалось.
XXI век изменил все. Квадрокоптеры получили новую жизнь, но аппараты были созданы для беспилотного использования. Конструкция квадрокоптера отличается простотой, поэтому нередко этот аппарат используют любители для моделирования. На квадрокоптеры обычно устанавливают камеру, но она не мешает устройству работать и летать, так как располагается вдалеке от зоны работы винтов. Четырехвинтовой мультикоптер может использоваться для малозатратной киносъемки и фото с воздуха.
Принцип действия и устройство
Мультикоптеры имеют чётное (от 4 до 12) число винтов постоянного шага (автомата перекоса,
в отличие от одно- и двухвинтовых аппаратов, нет). Каждый винт приводится в движение собственным двигателем.
Половина винтов вращается по часовой стрелке, половина — против, поэтому хвостовой винт мультикоптеру не нужен.
Маневрируют мультикоптеры путём изменения скорости вращения винтов. Например:
- ускорить все винты — подъём;
- ускорить винты с одной стороны и замедлить с другой — движение в строну;
- ускорить винты, вращающиеся по часовой стрелке, и замедлить вращающиеся против — поворот.
Микропроцессорная система, показанная на рисунке 2, переводит команды радиоуправления в команды к двигателям.
Чтобы обеспечить стабильное зависание, мультикоптеры в обязательном порядке снабжают тремя гироскопами,
фиксирующими крен аппарата. Как вспомогательный инструмент, иногда, также используется акселерометр,
данные от которого позволяют процессору устанавливать абсолютно горизонтальное положение, и бародатчик,
который позволяет фиксировать аппарат на нужной высоте.
Также, применяют сонар для автоматической посадки и
удержания небольшой высоты, а также для облёта препятствий. И самое главное — GPS-приемник, позволяющий записывать
маршрут полета заранее, с компьютера, а также, возвращать аппарат в точку взлёта, в случае потери управляющего радиосигнала,
или снимать параметры полёта оперативно или после посадки [3].
Рисунок 2 – Полетный контроллер KK2.0
Четырехвинтовое устройство оборудовано 4 винтами постоянного шага. Такой мультикоптер отличается от одно- и двухвинтового тем, что автомата перекоса у него нет. У каждого пропеллера есть свой двигатель, приводящий устройство в движение. Всего у четырехвинтового мультикоптера 4 двигателя, каждый из которых имеет собственное зарядное устройство (аккумулятор).

Маневрирование квадрокоптера осуществляется путем регулирования скорости пропеллеров и происходит таким образом:
- подъем устройства происходит путем ускорения всех четырех винтов;
- движение конструкции в сторону происходит, когда с одной стороны увеличивается скорость вращения пропеллеров, а с другой замедляется;
- поворот устройства — вращающиеся против часовой стрелки пропеллеры ускоряются, а те, что движутся по часовой стрелке, замедляются.
В квадрокоптере 4 винта, каждый из которых работает от собственного двигателя. Все винты работают целостно. Контролировать работу устройства получается благодаря микропроцессорной системе. Команды радиоуправления передаются на устройство и системой переводятся в команды каждому двигателю. Для стабильного зависания квадрокоптера в воздухе, на них обязательно устанавливают 3 гироскопа. Это позволяет зафиксировать крен мультикоптера.
В некоторых случаях на аппарат могут быть установлены акселерометр (позволяет зафиксировать устройство в горизонтальном положении) и бародатчик (помогает установить аппарат на нужной высоте). Для удержания небольшой высоты и посадки в автоматическом режиме, может использоваться сонар. Он помогает облетать препятствия.
В зависимости от расположения двигателей, устройства делятся на 2 вида:
- Крестообразный. У мультикоптеров этого вида двигатели размещены так: по одному двигателю спереди, сзади и по бокам.
- В виде буквы «Х». В таких устройствах 2 пропеллера находится спереди, 2 сзади. Вместе они напоминают букву «Х».
Как работает квадрокоптер?
Квадрокоптер использует четыре лопасти для создания подъёмной силы. Путем изменения скоростных характеристик каждого в отдельности воздушного винта, производится управление маневренностью аппарата в воздухе. Пропеллеры расположены в конфигурации из двух пар, одна пара вращается по часовой стрелке, в то время как вращение другой происходит против часовой стрелки.
Маневрируя скоростями лопастей вращающихся по часовой стрелки и реверсных винтов можно вызывать разворот квадрокоптера.
Для подъёмной вертикальной тяги, все четыре пропеллера должны работать с одинаковой скоростью.
Составные части квадрокоптера и процесс сборки
Каждый пропеллер квадрокоптера приводится в действие собственным электромотором, питаемым от мощных батарей и управляемых
микрокомпьютером. Задача последнего – поддерживать машину в полете, обеспечивая синхронность работы двигателей в зависимости
от показаний датчиков, преобразовывать команды оператора в изменения режимов работы двигателей.
Самым главным элементом летательного аппрата является рама. Она должна быть сбалансированной (значим вес каждого винтика),
жесткой (чтобы выдерживать нагрузки) и упругой (чтобы гасить
колебания и не рассыпаться при неудачном приземлении). Необходимо соблюсти все эти условия, грамотно разместить узлы и
дополнительное оборудование, выдержать требования к прочности и виброзащите.

Современные квадрокоптеры используют бесколлекторные электродвигатели и литий-полимерные аккумуляторы в качестве источника
энергии.
Поднимаемый полезный груз моделями квадрокоптеров среднего размера и грузоподъемности — от 500 гр. до 2—3 кг., что позволяет
поднять в воздух небольшую фото или видеокамеру.
Скорость полета мультикоптера может быть самой разной от нуля (неподвижное висение в точке) до 100-110 км/ч. Запас энергии
батарей позволяет отдельным моделям квадрокоптеров улетать на расстояние до 7-12 км.
На практике радиус действия (максимальное расстояние, на которое они способны улететь с последующим возвратом в точку
взлета) обычно ограничен прямой видимостью (100 – 200 м при ручном управлении) либо дальностью действия аппаратуры
радиоуправления и видеолинка. При этом лучшие образцы подобной аппаратуры, использующие усилители мощности радиосигнала и
систему направленных антенн, способны обеспечивать стабильные радиоуправление и видеолинк на расстояния до 100 км
[4].
Общая структура квадрокоптера приведена на рисунке 3.
Рисунок 3 – Структурная схема квадрокоптера
Соединив все элементы в единое целое, потихоньку начинает вырисовываться квадрокоптер. После сборки начинается долгий и
мучительный процесс настройки полетного контроллера.
Рисунок 4 – Сборка коптера
Рисунок 5 – Настройки полетного контроллера KK2.0
Разумеется, не обойтись без аппаратуры для дистанционного управления.
Рисунок 6 – Аппаратура дистанционного управления
Всегда было интересно как мир выглядит с высоты. Что видят птицы, чего не видно на картах GoogleEarth.
Так пришло увлечение заниматься квадрокоптерами, летать под облаками, снимать видео.
Мечта, о полете в облока воплатилась, квадрокоптер героически преодолел высоту в 10 метров и вернулся
на землю, став грудой обломков. Рвение полета было неприодалимо огромным и первый провальный полет меня не остановил.
Рисунок 7 – Полет квадрокоптера с фотоаппаратом
Как используется квадрокоптеры?
Традиционно БПЛА использовались военными для разведывательной деятельности и обеспечения топографической рекогносцировки.Поскольку технологии продвигаются вперёд и они стали более доступными, БПЛА в настоящее время широко используются в «гражданских» операциях. Пожарные используют беспилотники в тушении пожаров, нефтяные разведчики для сканирования участков земли в поисках нефти. Полиция также начала использовать беспилотные летательные аппараты для проведения визуального наблюдения.
Благодаря простоте конструкции появились доступные по цене БПЛА для массового использования. Теперь это приобретает масштабы популярного хобби, игрушки и даже заработка среди обывателей. Недорогие беспилотники со встроенными видеокамерами и различным дополнительным обвесом весьма востребованы на рынке.
Будущее квадрокоптеров
Как показывают исследования, технологическое развитие позволит уменьшать габариты, увеличит маневренность и приведёт к удешевлению производства. Потенциальные возможности использования беспилотных летательных аппаратов бесконечны.
Будущее выглядит ярким для квадрокоптеров. У них есть потенциал, чтобы значительно изменить жизнь человека к лучшему.
Купить отличные квадрокоптеры вы можете в нашем магазине — бесплатная доставка по России и СНГ, хорошие цены!





 купить по привлекательной цене 46990 руб. в Москве")