

- 1. Паровая голубка Архита Таренского
- Первый медицинский робот
- 2. Программируемая тележка Леонардо Да Винчи
- Первый военный робот
- Механические музыканты и ходячие паровозы
- Первый гуманоидный робот
- 4. Робот с возможностями рассуждения
- Первый роботизированный транспорт
- Первый космический робот
- 6. Робот-исследователь океана
- 7. Первый робот для изучения Марса
- Первый беспилотный робот
- История робототехники
- Умные машины тоже имели предков
- Кто первым создал робота?
- Русские автоматические космонавты
- Классификация роботов
- Ударники современного производства
- Стоит ли бояться роботов?
1. Паровая голубка Архита Таренского
Никто не знает, кто создал первого робота в истории, но некоторые историки утверждают, что первым кудесником роботов был Архит из Тарента. Архит — это древнегреческий математик и механик, которому принадлежит классический довод в пользу бесконечности Вселенной: «Окажись я на краю Вселенной, то есть на сфере неподвижных звёзд, мог бы я вытянуть вовне руку или палку в ней?
В общем, это был умный парень, который задавался умными вопросами, поэтому нельзя отрицать возможность того, что он смог построить деревянного парового голубя, который мог покрывать расстояние в 200 метров. Да, эта цифра кажется смешной, но учитывая, что «голубь» родился между 400 и 350 годами до нашей эры, то Архита можно назвать гением своего времени.
Первый медицинский робот
Первое официально зарегистрированное применение медицинского робота относится к 1984 году, когда «Артробот», разработанный в Ванкувере Джефом Окинлеком и доктором Джеймсом Мак-Уэном в сотрудничестве с хирургом Брайаном Дэйем, использовался при проведении ортопедической операции.
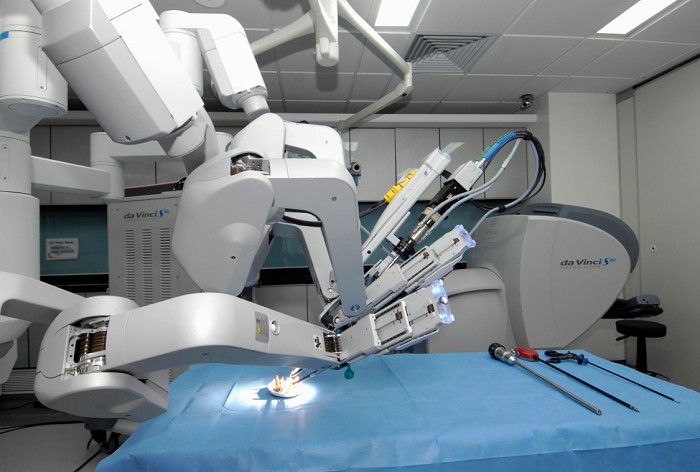
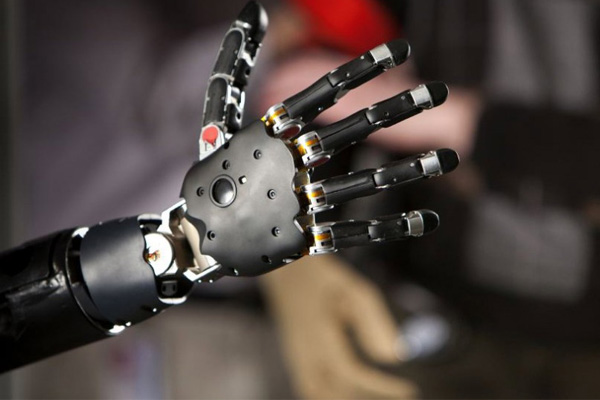
Роботизированный хирургический комплекс «да Винчи» позволяет выполнять сложнейшие операции в больницах по всему миру.
«Артробот» — небольшой робот для выполнения артропластики тазобедренного сустава (операции по восстановлению функции сустава). Он был спроектирован для точного сверления тазобедренных суставов, с возможностью программирования для создания полостей в определенных позициях и под определенным углом для последующей имплантации протезов.
Несмотря на то что небольшие и относительно простые усовершенствования и модификации оригинального «Артробота» привели к использованию роботов в более сложных хирургических операциях, таких, как полная замена коленного сустава, подобные новаторские решения в области медицинской робототехники таковыми и оставались вплоть до 1997 года, пока медицинские роботы не получили распространение.
Система «да Винчи» корпорации Intuitive Surgical Inc стала первым хирургическим роботом, получившим одобрение Управления по контролю за качеством пищевых продуктов и лекарственных препаратов США. Робот «да Винчи» представляет собой полноценный хирургический комплекс с набором инструментов, камерами, датчиками и прочими принадлежностями.
2. Программируемая тележка Леонардо Да Винчи
Одним из самых известных изобретений Леонардо да Винчи был человек-робот, напоминающий германского рыцаря, которого Леонардо рисовал (и, возможно, построил) в году 1495. Но несколько раннее, рядом с 1478 годом, изобретатель придумал самоходную тележку, которую многие современные эксперты считают первым в истории программируемым аппаратом.
Вместо паровой энергии и двигателя внутреннего сгорания транспортное средство приводилось в движение заведенной пружиной. Тележка двигалась только вперед, но «оператор» мог повернуть ее колеса в определенные промежутки времени, поместив колышки в маленькие отверстия.
В 2004 году итальянские специалисты (дизайнеры, программисты, инженеры и плотники) собрались вместе, чтобы реконструировать автоматическую тележку Леонардо. У них получилось, и сегодня ты можешь самостоятельно собрать небольшую копию.
Первый военный робот
Изобретенная в 1898 году Николой Тесла радиоуправляемая лодка, предназначенная для использования в военных целях и предлагаемая США с Великобританией, так и не была разработана.

Танк Т-26,набазе которого был создан телетанк ТТ-26
Во Второй мировой войне впервые были применены военные роботы в виде дистанционно управляемых беспилотных машин — немецкой самоходной мины «Голиаф» и советского танка «Телетанк». Телетанки были созданы на базе легких танков T-26, оснащенных гидравликой и аппаратурой телеуправления. Телетанки несли пулемет, огнемет, а также оборудование для установки дымовой завесы и использования химического оружия, что означало, что они были грозным орудием на поле боя.
Хотя и «Голиаф», и «Телетанк» были разработаны в одно и то же время, советские безэкипажные танки стали использоваться первыми и применялись во время Советско-финской войны (1939– 1940) в Восточной Финляндии.
Механические музыканты и ходячие паровозы
В списке роботов должен быть хоть один мошенник, иначе ты подумаешь, что мы работаем против людей. Так вот, в 1770 году изобретатель Вольфганг фон Кемпелен изобрел шахматный автомат, который выглядел как человек, одетый в турецкие одежды. Это было сделано для развлечения императрицы Марии Терезы. Спойлер: изобретение было чистым мошенничеством.
Механический «турок» сидел на деревянном шкафу, который был заполнен винтиками, шестеренками и другими механизмами. Перед ним красовалась шахматная доска. Автомат часто выигрывал в шахматы, и в числе противников «турка» были Наполеон Бонапарт и Бенджамин Франклин.
Скептики подозревали, что машина не могла действовать самостоятельно. И они были правы. Фон Кемпелен набирал талантливых шахматистов, которые прятались внутри шкафа механического «турка» и управляли им с помощью рычагов. Люди, которые видели устройство со стороны, никоим образом не могли увидеть спрятанных игроков.
Пускай механический «турок» и был тщательно продуманным обманом, но его существование стимулировало важные беседы о разуме машины, которые благотворно влияли на пришествие роботизированной эпохи.
В течение XVI века в Европе было создано множество устройств, в основном с использованием заводных (часовых) механизмов. Например, в Германии были изготовлены искусственная муха и орел, способные летать, а в Италии – женщина-робот, игравшая на лютне.
В течение XVII века европейцы разрабатывают и усовершенствуют первые механические «калькуляторы». Поначалу они могут лишь складывать и вычитать, но к концу века способны уже к делению и умножению.

Этот момент можно считать поворотным в истории робототехники, так как параллельно начинают развиваться две отрасли знания, которые в будущем будут использованы для создания современных роботов:
- разработка машин, имитирующих и заменяющих человека и его действия;
- создание устройств, предназначенных для хранения и обработки информации.
Параллельно продолжают создаваться механические человекоподобные устройства, способные играть на музыкальных инструментах, писать и рисовать.
Наступление XIX века ознаменовалось началом «дружбы» людей с электричеством. Оно начинает быстро распространяться и проникать во многие сферы человеческой деятельности. Одновременно совершенствуются различные механические вычислительные и аналитические машины, были изобретены телефон и телеграф.
Известны истории о различных человекоподобных машинах, якобы изобретенных и использовавшихся в США в течение XIX века:
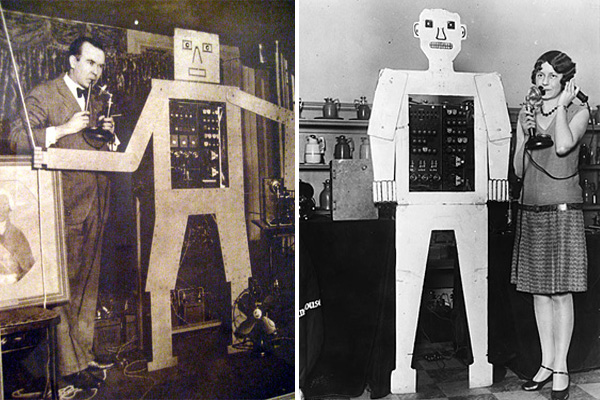
- в 1865 году конструктором Джонни Брейнардом был создан так называемый паровой человек, которого запрягали в повозку вместо лошади. Это был, по сути, паровоз, выглядевший как человек (только намного больше габаритами). Его нужно было постоянно «топить», и управлялся он, как лошадь, вожжами. Утверждалось, что он мог «ходить» со скоростью до 50 км/ч.
- Через некоторое время Фрэнк Рид испытывает уже «электрического человека», однако об этом изобретении мало что известно.
- В 1893 году Арчи Кемпион представил образец искусственного солдата на паровом ходу под названием Boilerplate, который якобы неоднократно использовался на практике, т. е. в боях.
Все эти сведения интересны, но вызывают некоторые сомнения, поскольку, несмотря на вроде бы выдающиеся характеристики, данные изделия так и не пошли в серийное производство, в отличие от паровозов, пароходов и так далее. Скорее всего, они существовали только в виде опытных экземпляров и так и не нашли своего применения, будучи, по сути, игрушками для взрослых.
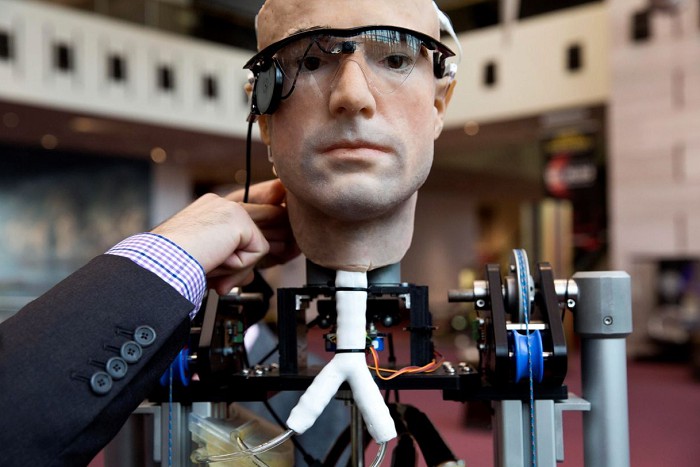
Первый гуманоидный робот
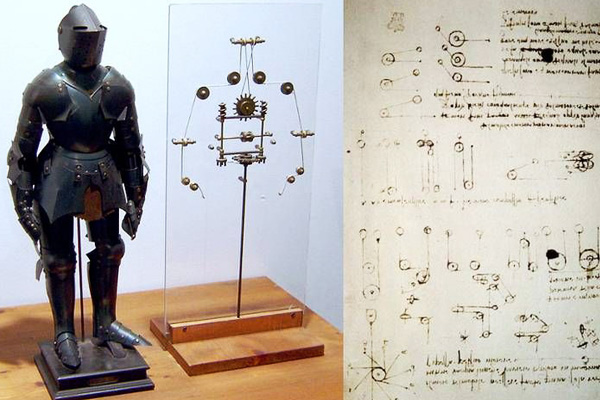
Человекоподобные роботы, часто называемые андроидами в научной фантастике, проектируются с учетом человеческих форм. Простые гуманоидные автоматоны создавались испокон веков и постепенно совершенствовались для более точной имитации внешнего вида и поведения человека. Одним из первых задокументированных примеров является механический рыцарь Леонардо да Винчи.
Робот-рыцарь Леонардо управлялся комбинацией шкивов и тросов, которые позволяли ему стоять, сидеть и независимо двигать руками. Он имел человеческую форму и даже был одет в доспехи, словно рыцарь. Хотя механизм да Винчи примитивен по сегодняшним меркам, ему не хватает искусственного интеллекта и дистанционного управления, но он опережал свое время в XV веке.
Да Винчи использовал во многих своих изобретениях шкивы, гири и шестерни, в том числе и в самоходной тележке, которую многие считают первым роботом. Позже он занялся дизайном робота-рыцаря для королевского театрализованного представления в Милане, которое состоялось в конце 1490-х годов.
Чертежи робота-рыцаря Леонардо да Винчи до сих пор используются современными робототехниками и даже вносят свою лепту в разработку роботов для NASA.
4. Робот с возможностями рассуждения
С 1966 по 1972 год в США разрабатывался первый мобильный робот с возможностями рассуждения. По сегодняшним меркам робот выглядел примитивно: его движения были отрывисты, и он напоминал неуклюжую стопку металлических шкафов. Но возможности были впечатляющими: робот мог выполнять общие команды в виде пошаговых действий для достижения цели, он был оборудован программами для наблюдения, рассуждения и действия. Можно было даже «поговорить» с роботом, набрав ему сообщение. Робот был способен ответить.
Эту коробку на колесах прозвали «первым электронным человеком» (Life от 1970 года). По сути, именно этот робот стал первой попыткой создать устройство, которое смогло бы думать. Попытка похвальная.
Первый роботизированный транспорт
После Всемирной выставки 1964 года писатель-фантаст Айзек Азимов в своих записях предсказал, что спустя 50 лет автомобили будут управляться «робомозгами». В течение многих лет после этого беспилотные транспортные средства существовали лишь в виде теоретических концепций и исследовательских проектов.

Компания Mercedes-Benz с 1980-х годов занимается исследованиями в области беспилотных транспортных средств
Настоящий прогресс начался в 1986 году, когда в Мюнхенском университете был запущен проект PROMETHEUS под управлением Европейского агентства координации исследований (EUREKA, European Research Coordination Agency). В течение почти десятилетия команда разработчиков трудилась над проектом беспилотного автомобиля под названием VITA, оборудованного датчиками, позволяющими регулировать скорость машины при обнаружении опасности.
В 1994 году автомобиль VITA совершил 1000-километровую поездку по парижскому шоссе в условиях плотного трафика, достигнув скорости в 128 километров в час. Позднее некоторые аспекты VITA были учтены при конструировании будущих автомобилей Mercedes-Benz.
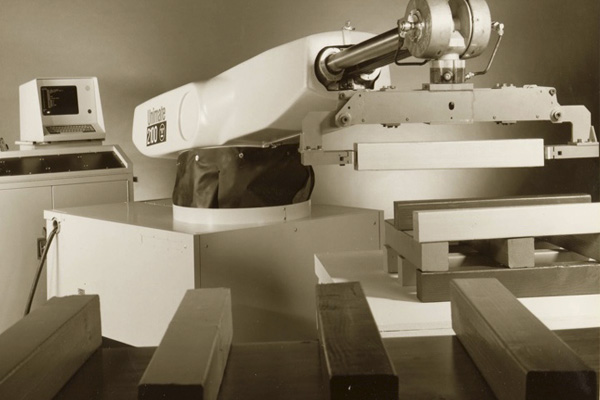
Первый промышленный робот был внедрен на производственной линии завода General Motors в 1961 году. «Юнимейт» представлял собой мощную роботизированную руку для установки литых металлических изделий и сварных компонентов на шасси автомобиля. Это был первый робот-манипулятор, который помог ускорить производственные линии на заводах по всему миру.
Первоначальная стоимость манипулятора «Юнимейт» составила 25 000 долларов. У робота было шесть программируемых осей движения, а конструкция позволяла работать с тяжелыми объектами на высокой скорости. Манипулятор весом 1,8 тонны оказался чрезвычайно универсальным и вскоре стал одним из самых популярных промышленных роботов в мире.

«Юнимейт» стал популярным и вне промышленного производства, приняв участие в «Вечернем шоу Джонни Карсона», в котором он разливал пиво и даже дирижировал оркестром.
Джордж Девол, первым разработавший промышленного программируемого робота в 1954 году, основал первую в мире компанию по производству роботов, Unimation. Роботы стали обычным явлением на современных сборочных линиях, так как их способность выполнять повторяющиеся задачи на высокой скорости превращает их в идеальные средства производства.
Роботизированная рука, которая весит почти две тонны, является представителем новой промышленной революции. Сконструировали её для того, чтобы снизить травмы среди сотрудников заводов. В итоге новая технология не только снизила травмы, но и лишила множество людей работы — за прогресс надо платить.
В 1961 году один из крупнейших автомобильных гигантов Америки внедрил эту технологию в конвейер нового завода в Джерси. Это послужило толчком для создания других роботизированных рук, которые стали использовать в промышленности по всему миру. Это сделало фабрики и заводы проще, безопаснее и эффективнее.
Первый космический робот
Можно сказать, что «Спутник-1», запущенный СССР в 1957 году, стал первым роботом в космосе. А «Робонавт», разработанный в сотрудничестве General Motors с NASA, получил звание первого гуманоидного робота в космосе и первого робота для работы с инструментами, созданными для людей, в космосе. В настоящее время он трудится на Международной космической станции (МКС).

Проект «Robonaut 2» нацелен на создание гуманоидной машины, способной на совместную работу с космонавтами, чтобы выполнять
трудные и опасные задачи по обслуживанию и ремонту техники в открытом космосе.
«R1», первый вариант «Робонавта», был прототипом, разработанным с целью исследовать, как гуманоидные роботы могли бы помочь астронавтам в открытом космосе. Его преемник «R2» оборудован полноценным роботизированным экзоскелетом, современной системой технического зрения, программным обеспечением для распознавания изображений, датчиками и алгоритмами управления, а также роботизированными руками.
6. Робот-исследователь океана
Океан — это одно из самых неисследованных мест на Земле, но благодаря достижениям в области робототехники океан покорился человеку. В 1995 году крупнейшее в США океанографическое научно-исследовательское учреждение завершило конструирование первого самостоятельно действующего подводного робота, которого создали ради сбора данных огромных океанских расстояний в течении длительного периода времени.
Робот может собирать образцы, делать фотографии и видео, а также вести обследование дна на глубине 5000 метров, используя датчики и личное оснащение.
7. Первый робот для изучения Марса
Без Марса мы не обойдемся, поэтому слушай. 4 июля 1997 года состоялась программа НАСА «Mars Pathfinder», в рамках которой на красную планету был сброшен марсоход «Соджорнен». Это был легкий робот на колесах, запрограммированный для изучения планеты. Уникальность марсохода в том, что он был способен принимать собственные решения и соответственно им реагировать на неожиданные встречи.
Робот сделал снимки Марса, собрал химические и атмосферные данные, собрал марсианский грунт и исследовал почти 2700 квадратных метров почвы планеты. Аппарат действовал на протяжении 83 дней — это было в 12 раз дольше, чем ожидали ученые. Этот крошечный робот был первым посланником человечества в совершенно ином мире — он проложил нашей цивилизации дорогу на Марс. Если взглянуть на научно-технический прогресс, то роботы продолжат нас удивлять, как и последние несколько тысяч лет.
Первый беспилотный робот
Дроны, или беспилотные летательные аппараты (БПЛА), использовались в течение сотен лет. Первое задокументированное применение датируется 1849 годом, когда австрийская армия запустила аэростаты, оснащенные бомбами, в сторону осажденной Венеции. Военные исследования в XX столетии привели к появлению ряда технологических инноваций, включая систему глобального позиционирования (GPS) и Интернет.
Это привело к созданию первого полностью автономного беспилотного летательного аппарата в 1973 году. Израильский дрон Tadiran Mastiff был оборудован системой передачи данных, позволяющей в автоматическом режиме и реальном времени вести высококачественную видеосъемку места полета и транслировать ее оператору. Эти БПЛА предварительно программировались на траекторию полета и широко использовались армией обороны Израиля.
Современные военные беспилотники, такие как «Предатор» и «Таранис», играют ключевую роль на поле боя.
Поделиться ссылкой
История робототехники
- Человеко-машинное взаимодействие — раздел робототехники, изучающий взаимодействия между людьми и машинами. Если беспилотный автомобиль увидит знак стоп и нажмет на тормоза в последний момент, он напугает и пешеходов, и пассажиров. Изучение человеко-машинного взаимодействия помогает инженерам создавать мир, где люди и машины живут в гармонии и не мешают друг другу.
- Сингулярность — гипотеза о том, что однажды машины станут настолько умнее людей, что настанет экзистенциальный кризис.
- Мультипликативность — идея, согласно которой искусственный интеллект не заменит людей, а будет их дополнять.
- Привод — обычно комбинация электрического двигателя и коробки передач. Большинство роботов работает на приводе.
- Мягкие роботы — вид роботов, сделанных не из традиционных, а более мягких материалов. Двигаются такие роботы благодаря закачке воздуха или масла.
- Лидар — специальная система, которая создает 3D-карту окружения с помощью лазеров и позволяет роботу ориентироваться в пространстве. Крайне важна как для беспилотных автомобилей, так и для рабочих роботов.
- Гуманоидный робот — классический робот из научной фантастики. Сделать такого робота, пожалуй, сложнее всего, из-за того что подобной конструкции тяжело ходить и балансировать на двух ногах. Однако гуманоидные роботы могут пригодиться при выполнении спасательных операций в опасных для людей зонах, например, внутри ядерного реактора.
Автоматизация и роботизация производства в капиталистическом мире началась в 50-е годы XX века. Именно к тому времени можно отнести появление первых промышленных роботов. Они осуществляли сборку оборудования, и простейшие монотонные операции. Первый такой робот был разработан изобретателем самоучкой Джоржем Деволом в 1954 году.
Первый робот был установлен на заводе Дженерал Моторс (на литейном участке) в 1961 году. Затем новинка была опробована заводами Chrysler и Ford,
Система Unimate применялась для работы с литыми металлическими деталями, которые манипулятор извлекал из форм отливки. Захватиное устройство управлялось гидроприводом.Робот имел 5 степеней свободы и захватное устройство с двумя “пальцами”. Точность работы была весьма высока до 1,25 мм. И был эффективнее человека – работал и быстрее и с меньшим количеством брака.
В 1967 промышленные манипуляторы приходят Европу. Они уже расширяют свой функционал, осваивают профессии сварщика, маляра. У робота появляется “техническое зрение” посредством видеокамер и датчиков, он учится определять габариты изделий и место их расположения.
В 1982 году IBM разрабатывает официальный язык для программирования робототехнических систем. В 1984 – компания Adept представила первый робот Scara с электроприводом.Новая конструкция сделала роботы более простыми и надежными, сохранив высокую скорость.
В 90-е появился контроллер с интуитивным интерфейсом управления, которому мог управлять оператор, он мог изменять параметры и регулировать режим работы. С тех пор возможности управления роботами и их функиции только развивались, увеличивалась их сложность, скорость, число осей, стали использоваться различные материалы , шире становились возможности разработки и управления, было сделано несколько первых уверенных шагов в сторону искусственного интеллекта.
В то же время в СССР был фактически лидером в робототехнике. Началось все еще в 30-е годы. В 1936 году 16–летний советский школьник Вадим Мацкевич создал робота, который умел поднимать правую руку. Для этого он потратил 2 года работы в токарных мастерских новочеркасского Политеха. Ранее, в 12 лет создал маленький радиоуправляемый броневик, стрелявший фейерверками. На “робота” Мацкевича обратили внимание власти и в 1937 году он представлял его на Всемирной выставке 1937 года в Париже.
На рубеже 30 – 40-х гг. XX в. в СССР также появились автоматические линии для обработки деталей подшипников, а в конце 40-х гг. XX в. впервые в мировой практике было создано комплексное производство поршней для тракторных двигателей с автоматизацией всех процессов — от загрузки сырья до упаковки готовой продукции.
В 1966 в Воронеже был изобретен манипулятор для укладки металлических листов, в 1968 в Ленинграде году разработали подводный робот “Манта” с чувствительным захватным устройством – в дальнейшем он совершенствовался. В 1969 году в ЦНИТИ Миноборонпрома приступили к разработке промышленного робота «Универсал-50». В дальнейшем активно внедрялись автоматизированные системы на крупные производства.
В 1985 году уже использовалось 40 тыс промышленых роботов и в несколько раз превосходило количество, используемых в США. Автоматизированые линии вовсю работали на АвтоВазе в 80-е года и даже подвергались атакам работников-“хакеров”.
Были крупные военные и космические разработки. Уникальным достижением по тем временам был беспилотный разведчик ДБР-1, который был принят на вооружение ВВС СССР еще в 1964 году. Такой аппарат мог выполнять разведывательные задачи над всей территорией Западной и Центральной Европы.
Одним из самых заметных достижений отечественной робототехники и науки стало создание в КБ им. Лавочкина «Лунохода-1». Именно советский аппарат стал первым в мире планетоходом, который успешно выполнил свою миссию на поверхности другого небесного тела.
В 1983 году на вооружение ВМФ СССР был принят уникальный противокорабельный комплекс П-700 «Гранит». Его особенностью стало то, что при залповом пуске ракеты могли самостоятельно выстраиваться в боевой порядок и во время полета обмениваться между собой информацией, самостоятельно распределяя цели. При этом одна из ракет комплекса могла играть роль лидера, занимая более высокий эшелон атаки.
Развивались и “роботы-гуманоиды”: в 1962 году появился первый робот экскурсовод Рэкс – он проводил экскурсии для детей в Политехническом музее. Говорят, он все еще там “работает”.
В Советском Союзе было выпущено более 100 тыс. единиц промышленной робототехники. Они заменили более одного миллиона рабочих, но в 90-е годы эти роботы исчезли.
В дальнейшем развитие робототехники идет ударными темпами, потому что развивается ключевые отрасли – физика, химия, электротехника и главное – электроника. На смену вакуумным лампам пришла силовая электроника, позже микросхемы, затем микроконтроллеры… Появляются новые материалы, новые способы автоматизации и методы программирования.
Но к России и СНГ это не уже не относится. Прежде всего развитие происходит в США, в Юго-Восточной Азии и Западной Европе.
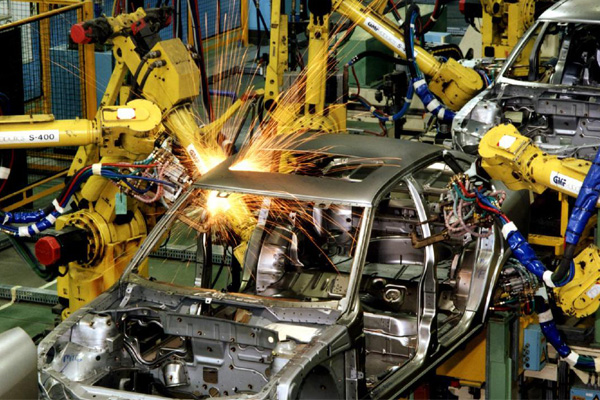
На производствах внедряются управляемые роботизированные линии, роботы манипуляторы используются во всех отраслях промышленности, в сельском хозяйстве, медицине, в космосе и, конечно, в быту.
В некоторых отраслях до 50% работ выполняют промышленные роботы, например в автомобилестроении они могут сварить, покрасить, и переместить детали на другой участок сборки, где ими займутся другие роботы.
Существуют даже 100% автоматизированные фабрики. В Японии есть завод где роботы сами собирают роботов. И даже готовят еду для 2000 человек – офисного центра, обслуживающего этот завод.
В 90-е годы наблюдался некоторый спад. Внедрение роботов, использующих существующие в то время технологии, на производство не принесло ожидаемой прибыли и финансирование некоторых крупномасштабных проектов было приостановлено. По ряду причин – и экономических, и социальных – ожидаемого бума не произошло, они остались как нишевая продукция для автосборочных и ряда других производств.
Резкий скачок произошел только в середине нулевых и это развитие продолжается. Прежде всего из-за того, что в робототехнике заинтересовались военные… Остановить уже развитие невозможно и все странам, желающим быть в авангарде мировой промышленности приходится это принимать и догонять.

Выделяют шесть общих задач роботехники:
- Перемещение – передвижение в любой среде
- Ориентация – осознавать свое местоположение
- Манипуляция – свободно манипулировать предметами окружающей среды
- Взаимодействие – контактировать с себеподобными
- Коммуникация – свободно общаться с человеком
- Искусственный интеллект – робот должен самостоятельно решать как ему выполнить команду человека
Самое оптимальное перемещение робота на колесах и гусеничной платформе. Именно эти способы обеспечивают наибольшую устойчивость и проходимость.У колесных платформ с проходимостью сложнее – колесо не может преодолеть препятствие выше, чем его радиус. Колесные схемы постоянно совершенствуются, используются мощные серводвигатели, разрабатывается независимые подвески, применяются покрышки с грунтозацепами.
Устойчивы четырехноние и инсектоморфные роботы (это значит в форме насекомых, несколько “ног”, обычно 6) Такие устройства часто используются для военных целей.
Ходить на двух ногах робот учился очень долго. Из всех существующих с этим хорошо справляется только гуманоид ASIMO от Honda он умеет не только устойчиво ходить, но и подниматься по ступеням, компания его разрабатывала более 25 лет Большинство же человекоподобных роботов пока передвигаются на платформе.
Кроме хождения по земле опреденные модели могут ползать, плавать и летать.
Ориентрируется в пространстве робот с помощью датчиков, сенсоров, видеокамер, имеет способность “видеть” в инфракрасном диапазоне, улаваливать ультразвуковые колебания и воспринимать тепловое излучение.Управлять может и оператор, он может находиться в той же комнате или за несколько километров.
Все озвученные задачи робототехники в той или иной мере решаются. Робот становится совершеннее, он умеет сотрудничать с другими роботами, учится общаться человеком и лучше его понимать.
Интересная схема обучения космического робота-спутника, вероятно этот же принцип используется для настройки других робототехнических систем. “Эмоциональное обучение”, как называют его разработчики. Суть его в том, что в нем закладывается “аппарат эмоций”, который сообщает спутнику что для него “хорошо”, а что “плохо”.
Хорошо – если он нацеливается на конкретный заданный обьект – это увеличивает оценку, плохо – если от него отклоняется – оценка будет уменьшена. Ну и так пока устройство не станет стабильным “хорошистом”. Например, это может пригодиться для космических телескопов. Обучение проводится с помощью оператора и занимает около 20 минут, результат отображается в базе знаний.
Умные машины тоже имели предков
История робототехники уходит корнями в глубокую древность. Некое подобие роботов изобрели еще в Древнем Египте более четырех тысяч лет назад, когда жрецы прятались внутри статуй богов и разговаривали оттуда с людьми. У статуй при этом двигались руки и головы.
Если дать некоторую волю фантазии, можно обнаружить упоминания о роботах, например, в мифах Древней Греции. Еще у Гомера упомянуты механические слуги, которых создавал для себя древнегреческий бог Гефест, великан Талос, сотворенный им же из бронзы для охраны Крита от неприятеля. Платон повествует об ученом Архите из Тарентума, сделавшем искусственного голубя, способного летать.
Архимедом в III веке до нашей эры был якобы изготовлен аппарат, крайне напоминающий современный планетарий: прозрачный шар, приводившийся в движение водой, на котором отображалось движение всех небесных тел, известных на тот момент.
В Средние века люди уже начали создавать настоящие машины, способные делать множество интересных вещей. К периоду Средневековья относятся и попытки создания первых человекообразных машин.
Альберт Великий, известный алхимик XIII века, создал андроида, выполнявшего функции привратника, открывавшего дверь на стук и кланявшегося гостям (андроид – робот, копирующий человека внешностью и поведением). Он же сконструировал механизм, способный говорить человеческим голосом, так называемую говорящую голову.

Ответ на вопрос о том, человек или робот должен выполнять ту или иную работу, кроется в различиях между людьми и машинами. На данный момент даже самые совершенные из машин действуют по определенным, заранее заложенным в программу алгоритмам (пускай порой и весьма сложным). У них нет свободы воли, свободы выбора, желаний, порывов, ничего из того, что определяет творческую составляющую человека.
Робот может выполнить работу большой сложности и точности, сможет выполнить эту работу в таких условиях, в которых человек не прожил бы и часа. Но он не сможет написать книгу или сценарий нового фильма, создать живописное полотно, если только это не было заранее заложено в его память человеком.
Поэтому профессии творческие, где важна нестандартность, нешаблонность мышления, безусловно, остаются за людьми. Робот может быть сварщиком, грузчиком, маляром, даже космонавтом, но он не сможет стать (по крайней мере, на нынешнем этапе развития) писателем, поэтом или художником.
В истории практически каждого народа есть легенды о том, как мастера прошлых веков использовали человекоподобные технические устройства. Есть записи от 2 тыс. до н.э. о создании в Древнем Египте статуи, которая во время обрядов могла указывать, поднимая робо-руки, на наследника правителя.
В начале второго тысячелетия до н.э. в Китае были созданы прототипы роботов, которые запускались под воздействием силы пороховых взрывов, а для развлечения императора умельцы создали механического андроида.
Древнегреческому ученому Архимеду приписывают создание первой военной машины «Коготь». Её закрепляли на оборонной стене, и, пользуясь длинным крюком, подцепляли осаждавшие корабли соперников и переворачивали их.
Наибольшего внимания заслуживали записи Леонардо да Винчи, который создал достаточно подробные схемы нескольких человекоподобных механизмов. По одному из таких вариантов в 1495 году была собрана фигура рыцаря, который мог двигать шеей, конечностями, открывать рот, присаживаться. Кстати, чертежи сохранились, и по ним рыцарь был воспроизведен. Сегодня его можно увидеть в Миланском музее.
Основной сдерживающей силой робототехники и автоматизированных механизмов была церковь, считавшая любые проявления «на тему» ересью, поэтому по-настоящему развиваться направление начало только к 18 веку. Одними из выдающихся изобретателей того времени были:
- Жак де Вокансон, создавший механическую утку (умела клевать, двигать крыльями) и музыканта (играл на флейте и свирели);
- Пьер Жаке Дро (основатель часовой компании Jaquet Droz). Стал известен не только часовыми механизмами, но и созданием механического писаря, художника, музыканта.
Отличительной особенностью этих вариантов, от других дорогостоящих игрушек, была возможность управлять ими. Правда, для этого использовалось не ПО, а пружины, насечки, меняя последовательность которых, меняли текст, изображение, музыку.
Технология создания механических моделей (с часовыми механизмами) использовалась вплоть до 19 века, когда появилась недостающая деталь – электричество, которое обеспечивало устройство питанием на продолжительное время.
Изобретатели стали постепенно внедрять механизмы в производственные этапы, чтобы облегчить и ускорить процесс.
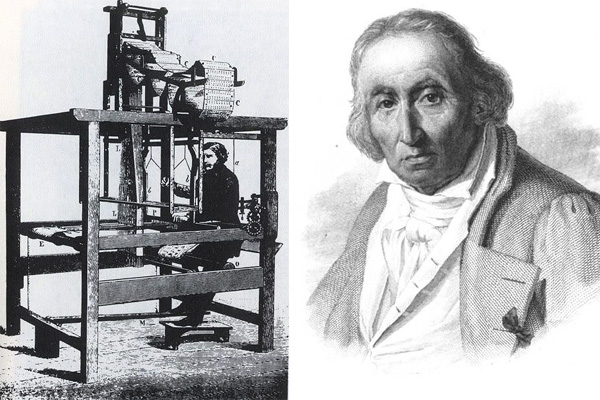
Прототипом первой автоматизированной линии в 1808 году был ткацкий станок французского ткача Жозефа Мари Жаккара, который программировался при помощи специальных перфорированных карт. Конечно, это не манипулятор Kuka, но здесь использован главный принцип программирования, на котором до сих пор базируется робототехника.
Еще один изобретатель и новатор Никола Тесла в 1898 году представил свою разработку – лодку, которая управлялась дистанционно (при помощи радио). Так постепенно освоилось не только использование различных источников питания, но и управления (проводные и радиоволновые устройства).
Кто первым создал робота?
Проект первого робота, о котором сохранились достоверные сведения, создал Леонардо да Винчи. Это был андроид, выглядевший как рыцарь в доспехах. Согласно чертежам Леонардо, он мог двигать руками и головой. Остается открытым вопрос, почему знаменитый изобретатель не наделил своего рыцаря возможностью двигать ногами, т. е. ходить.
Точно не известно, смог ли да Винчи построить своего «терминатора», зато он сконструировал робота-льва, который при появлении короля разрывал себе когтями грудь, показывая скрытый в ней герб Франции.
Кроме этого, у Леонардо также были идеи о взаимодействии механизмов с человеческими органами, т. е. он уже на рубеже XV-XVI веков предвосхитил современные разработки протезов, управляющихся непосредственно нервной системой человека.
Русские автоматические космонавты
Официально начало робототехники в России датируется 1971 годом. Именно тогда она была официально признана наукой в СССР. Хотя к тому времени автоматы российского производства уже вовсю бороздили просторы космоса.
В 1957 году вышел на орбиту первый в мире искусственный спутник Земли. В 1966 году станция “Луна-9” передает на Землю радиосигнал с поверхности Луны, а аппарат “Венера-3”, успешно достигнув планеты, установил там вымпел СССР.
Всего через четыре года запущены еще две лунные станции и обе выполнили свою миссию успешно. Аппарат “Луноход-1”, доставленный станцией “Луна-17”, проработал в три раза дольше, чем планировалось, и передал советским ученым множество ценнейшей информации.
В 1973 году еще одна станция этой же серии доставила на Луну еще один луноход, который также справился со своей задачей на отлично.
Классификация роботов
Существует несколько методов классификации. По характеру выполняемых работ автоматы делятся на промышленные, строительные, для сельского хозяйства, для транспортировки, бытовые, военные, охранные, медицинские и исследовательские.
По типу управления они подразделяются на управляемые с помощью оператора, полуавтономные и полностью автономные.
Машины первого типа являются просто дистанционно управляемыми машинами (простейший пример – детский радиоуправляемый автомобильчик или вертолет). Полуавтономные могут выполнять самостоятельно часть операций, но в ключевых моментах все же требуется вмешательство человека. Полностью автономные роботы весь спектр операций выполняют самостоятельно (например, манипуляторы автоматических сборочных линий).
По уровню мобильности выделяют следующие классы роботов: стационарные и мобильные. Стационарные – это те самые манипуляторы, которые все привыкли видеть, например, на автомобильных заводах. Мобильные дополнительно делятся на шагающие, колесные либо на гусеничном ходу.
Ударники современного производства
Различные промышленные производства являются той отраслью, в которой находит практическое применение основная часть современных автоматических устройств.
История промышленной робототехники начинается в 1725 году, когда во Франции была изобретена перфолента, примененная для программирования ткацких станков.
Начало автоматизации производства пришлось на XIX век, когда во Франции стартовало массовое производство автоматических ткацких станков на перфокартах.
Первую конвейерную линию для сборки автомобилей установил на своем заводе Генри Форд в 1913 году. Сборка одного автомобиля занимала порядка полутора часов. Конечно же, эта линия еще не была полностью автоматизированной, как сейчас, но это был выход на качественно новый уровень производства.
Официально использование роботов на производстве начинается в 1961 году, когда на заводе General Motors в Нью-Джерси был установлен первый официально изготовленный манипулятор. Работала эта машина на гидроприводах и программировалась через магнитный барабан.
Бум разработок в сфере промышленной автоматизации пришелся на 70-е годы XX века. В 1970 году в США был создан первый манипулятор современного типа для использования в промышленности: он обладал электроприводами с шестью степенями свободы и управлялся с компьютера. Параллельно разработки велись в Швейцарии, Германии и Японии. В 1977 году выпущен первый робот японского производства.
Стоит ли бояться роботов?
Самый главный страх человечества в отношении машин – это боязнь того, что они, став совершенными, однажды перестанут подчиняться и начнут жить своей жизнью, превратив в рабов уже людей. Этот страх шел рука об руку с развитием робототехники. Он находит свое выражение как в мифологии (например, еврейский миф о големе, восставшем против своего создателя), так и в искусстве.
Однако на современном этапе развития науки эти страхи бессмысленны. У роботов отсутствует сознание, аналогичное человеческому, поэтому у них не может быть вообще никаких желаний, не говоря уже о стремлении захватить мир.
Для того чтобы воспроизвести сознание у машины, человеку необходимо сначала разобраться, что представляет собой его собственное сознание, как и из чего оно формируется. Ответ на этот вопрос кроется в глубинах человеческого мозга, который исследован еще далеко не полностью.
Для того чтобы «восстать», роботам необходимо понимать, что такое мировое господство и для чего им это нужно.
А до этого момента любая, даже самая сложная и совершенная машина принципиально ничем не отличается от кухонного комбайна или кофемолки. Поэтому вопрос о том, кто в итоге будет главным на Земле – робот или человек, пока не является насущным.