

- Калибровка квадрокоптера на основных режимах полёта
- Yaw (рыскание) и pid
- Виды калибровки
- Как вывести дрон из состояния вихревого потока
- Как калибровать квадрокоптер syma
- Как триммировать квадрокоптер. инструкция
- Как увеличить подъемную силу дрона?
- Как управлять квадрокоптером?
- Калибровка каждого регулятора
- Настройка pid квадрокоптера
- Режимы полёта дрона
- Советы и типичные ошибки
- Триммирование квадрокоптера
Калибровка квадрокоптера на основных режимах полёта
Для того чтобы правильно произвести настройку квадрокоптера, надо знать основные режимы полёта:
- Stabilize. В этом режиме автопилот, без применения стиков сам убирает крен и тангаж и приводит квадрокоптер к горизонту.
- AltHold. Режим выдерживания высоты. Считывая показания барометра, дрон выдерживает заданную высоту, стиком газа её корректируют с начальными показателями.
- Acro. Если не трогать стики, тангаж и крен остаются неизменными, чтобы их выровнять нужно перемещать стики в противоположную сторону.
- Auto. По данным GPS перемещение по путевым точкам.
- Loiter. Режим зависания. Аппарат выдерживает заданные координаты и высоту.
- Position. Режим зависания с помощью газа.
- Guided. Перелёт в заданный waypoint и нахождение в этой точке.
- Circle. Сохраняя радиус, перемещение вокруг заданной точки.
- RTL. Режим возврата на точку старта с посадкой или зависанием на двухметровой высоте над этой точкой.
- OF Loiter. Используя OpticalFlowSensor, выполняется режим зависания с ещё большей точностью.
- Drift. Самолётный режим с выдерживанием заданного курса.
- Sport. При выполнении съёмки, высота выдерживается автоматически вместе с углом крена.
- Land. Выполнение посадки.
Теперь зная основные режимы полёта, вполне понятно для чего необходима тщательная калибровка квадрокоптера.
Yaw (рыскание) и pid
Самая сложная часть для понимания при настройке ПИДов — ось рыскания. Но это также самая легкая часть, потому что вы можете оставить ее по умолчанию в Betaflight, и ваш квадрокоптер будет летать просто отлично.
PID могут помочь с улучшением рыскания дрона, но вы должны учитывать и многие другие факторы, которые могут привести к дестабилизация рыскания.
Одним из симптомов плохого рыскания: вы делаете быстрое рыскание и в этот момент даете резкий газ, а дрон по оси (yaw) рыскания не остается на этом же уровне.
Хорошая работа по этой оси также зависит от качества оборудования: двигателей, пропеллеров и регуляторов оборотов. Ими определяется, на сколько быстро дрон сможет перемещаться по оси рыскания (yaw).
Чтобы улучшить рыскание, вы можете попробовать следующее:
- использование более тяжелых пропеллеров, за счет обратного крутящего момента (можно сравнить с юлой, ее раскрутили и она крутится).
- использование двигателей с более высоким KV
- использование регуляторов оборотов с сильным торможением — если торможение слабое, то тормозящие двигатели не успевают останавливаться с такой же скоростью, как увеличиваются по скорости противоположные двигатели.
- уменьшение дальности расположения двигателей поможет увеличить скорость рыскания, чем короче будут лучи (то, на что крепятся двигатели), тем быстрее будет происходить рыскание.
Виды калибровки
- Механическая калибровка квадрокоптера
Механическая калибровка, это подкручивание регулятора тяги. Подкручиваешь регулятор, поднимаешь дрон, если проблема осталась – повторяешь. Используется тогда, когда отклонение от нужной оси не очень велико. - Автоматическая калибровка квадрокоптера
Автоматическая калибровка, это настройка работы дрона с пульта управления. Применяется, когда нужно сместить триммер на 5 и более позиций. Она происходит по-разному, в зависимости от пульта и контроллера. Придётся обратиться к инструкции. - С помощью ПО mission planer
Это программа для калибровки плат Ardupilot. Она позволяет программно задать нужные параметры. Как правило, калибровка через неё происходит перед первым запуском самодельного коптера.
Калибровка происходит следующим образом:
- Включаем передатчик радиоуправления (на момент калибровки регуляторов радиоуправление должно быть уже откалибровано). Выставляем ручку газа на максимум
- Берем Li-Po аккумулятор и подключаем к разъему Power-модуля для включения автопилота. Питание регуляторов соответственно тоже будет обеспечивать этот аккумулятор
- После включения APM будет мигать своими синими и красными светодиодами. Этим он сигнализирует готовность к калибровке при следующем включении. Отключаем аккумулятор от Power-модуля
- Включаем питание заново. Регуляторы издают стандартный звуковой сигнал (обычно количество сигналов равно количеству банок в батарее) и через некоторое время дважды издает короткий сигнал, что подтверждает калибровку по максимальному газу
- Опускаем ручку газа в минимальное положение. Регуляторы издают один долгий сигнал, что подтверждает калибровку по минимальному газу
- С этого момента калибровка регуляторов для APM 2.8 завершена и можно проверить работоспособность моторов
- Убираем газ на минимум и выключаем питание Ardupilot.
Как вывести дрон из состояния вихревого потока
Чтобы спасти квадрокоптер от неминуемого падения, вам нужно вернуть его пропеллеры назад в чистый (т.е. нетурбулентный) воздух. Для этого вам нужно выйти из вертикального снижения, переместив дрон вперёд либо в любую другую сторону.
https://www.youtube.com/watch?v=4tzQ3z4oYMI
Представьте, что прямо под вашим квадрокоптером расположен столб турбулентного воздуха, и ваша задача – вырваться из него в любом направлении. Кроме этого вам следует максимально уменьшить газ, чтобы снизить поток турбулентного воздуха под дроном. Как вы помните, чем быстрее крутятся винты дрона, тем более сильные завихрения возникают под ними – а этого нам нужно избежать.
В некоторых ситуациях поток воздуха, через который снижается ваш дрон, может быть настолько завихрённым, что вы полностью потеряете управление (мультикоптер не будет реагировать на попытки изменить крен, рыскание и тангаж). В этом случае что-либо предпринимать уже поздно: ваш квадрокоптер, вероятнее всего, станет очередной жертвой состояния вихревого кольца и разобьётся. Именно поэтому так важно вовремя распознать опасную ситуацию!
Итак, как только вы обнаружили, что ваш квадрокоптер попал в состояние вихревого кольца, немедленно сделайте следующее:
- Направьте дрон вперёд (или в любую другую сторону), чтобы покинуть турбулентную зону.
- Если это не помогло, снизьте газ, чтобы уменьшить завихрения, и повторите пункт 1.
Помните: никогда не увеличивайте газ, находясь в состоянии вихревого кольца.
Как калибровать квадрокоптер syma
Принципиально триммирование и настройка подобных дронов не отличается от описанной выше процедуры. Ее можно легко провести собственными силами с помощью инструкции, прилагаемой к коптеру. Также обратим внимание, что модели Syma оснащены устройством, контролирующим уровень заряда аккумулятора.
При приближении последнего к критическому уровню дрон самостоятельно снижается до безопасной высоты, что предупредит его повреждение при полной разрядке и падении на землю. Про этот момент нужно обязательно помнить и если не удается произвести настройку квадрокоптера, то обратите внимание на уровень заряда.

Сам процесс калибровки и триммирования не отличается от моделей других производителей. Для начала нужно запустить дрон на высоту чуть выше полуметра и понаблюдать за ним. Если происходит самопроизвольное смещение, то нужно подкорректировать, учитывая следующие моменты:
- при вращении влево триммер под левым джойстиком управления нужно медленно сдвигать вправо до момента прекращения подобного движения и на оборот;
- при движении аппарата вперед или назад нужно передвигать триммер под правым джойстиком также в противоположном направлении.
Обратите внимание, что передвигать триммер нужно очень медленно из-за риска перестараться и необходимости откалибровать его уже в обратном направлении.
Как триммировать квадрокоптер. инструкция
В этой статье мы расскажем вам, как триммировать квадрокоптер. Процесс триммирования можно назвать проще и понятнее – по своей сути, это калибровка устройства. 90% моделей выпускается уже откалиброванными и попадает вам в руки в комплектации Ready to Fly, но в ходе транспортировки от ударов эти настройки могут сбиться. Поэтому, если при полёте ваш коптер имеет крен на какую-то из сторон или вовсе летит не туда, куда вы указываете, не спешите сдавать его как брак – просто произведите триммирование.

Первое, что нужно сделать перед триммированием, — это разобраться с функционалом джойстиков пульта дистанционного управления. Как правило, левый стик отвечает за перемещение дрона в вертикальной оси, а правый – за крены вбок и наклоны вперед. И второе, о чем стоит знать — это то, что процесс триммирования лучше всего производить только в воздухе.
Если устройство не наберет высоту хотя бы в 0,5 метра, то тянуть его будет создаваемая винтами воздушная подушка. Если же он наберет большую высоту, то вы сможете откалибровать его для зависания в воздухе без кренов и наклонов. Триммирование может быть необходимо как левому, так и правому джойстику. Как понять, с каким из рычагов управления проблема у вас?

- Если квадрокоптер постоянно кренится на левый или правый бок, то триммировать необходимо правый рычаг и производить регулировку по крену.
- Если квадрокоптер самостоятельно наклоняется то вперед, то назад – триммирование требуется для левого стика, регулировка которого будет производиться по тангажу.
- Если квадрокоптер одновременно и кренится на бок, и наклоняется, то вам придется откалибровать оба стика.
Для начала стоит понять, в каком из случаев квадрокоптеру требуется калибровка. Итак, вот поэтапный процесс:
- Первый этап – включение пульта ДУ и квадрокоптера.
- На втором этапе квадрокоптер запускается и поднимается на высоту минимум в 50 сантиметров. Уже на этом этапе возможно понять, в какую из сторон кренится дрон. Если на этом этапе вам для зависания приходится выполнять дополнительные маневры, можно сразу сказать, что триммирование квадрокоптеру необходимо.
- На третьем этапе вам предстоит выбрать между механической калибровкой и автоматической.

Теперь рассмотрим, чем отличаются механическая и автоматическая калибровка. Механическая используется в случае, когда отклонения значительные. Если же калибровка требует смещения положения триммера максимум на 5 позиций, воспользуйтесь автоматической калибровкой с пульта.
Процесс механической калибровки заключается в повторении одного и того же пункта – постепенного подкручивания регулятора тяги между тарелкой и сервоприводом. Автоматическая же калибровка подразумевает перечень действий со специальными переключателями в зависимости от проблемы. Так, если вертолет постоянно наклоняется вперед, поставьте триммер тангажа в нижнее положение. Повторяйте это несколько раз, пока коптер не достигнет желаемого положения.
Та же процедура необходима и в случае, если коптер наклоняется назад – только триммер ставится в верхнее положение. Аналогичные действия совершаются и в случае, если нужно откалибровать коптер влево или вправо. Если дрон уносит влево, установите триммер в крайнее правое положение, а если вправо, то в крайнее левое. Процесс настройки квадрокоптера для новичков показан на видео ниже.
Шаблоны Инстаграм БЕСПЛАТНО
Хотите получить БЕСПЛАТНЫЙ набор шаблонов для красивого Инстаграма?
Напишите моему чат-помощнику в Telegram ниже 👇
Вы получите: 🎭 Бесплатные шаблоны “Bezh”, “Akvarel”, “Gold”
Telegram Viber Vkontakte
или пишите “Хочу бесплатные шаблоны” в директ Инстаграм @shablonoved.ru
Шаблоны Инстаграм БЕСПЛАТНО
Хотите получить БЕСПЛАТНЫЙ набор шаблонов для красивого Инстаграма?
Напишите моему чат-помощнику в Telegram ниже 👇
Вы получите: 🎭 Бесплатные шаблоны “Bezh”, “Akvarel”, “Gold”
Telegram Viber Vkontakte
или пишите “Хочу бесплатные шаблоны” в директ Инстаграм @shablonoved.ru
Как увеличить подъемную силу дрона?
Как увеличить подъемную силу дрона?
Мои ответ будет касаться беспилотных, летательных, роторных дронов, а также коптеров с произвольным количеством винтов (мультикоптер), далее – коптер.
Подъёмную силу коптера можно увеличить на 10% (цифра получена экспериментально) за счёт установки на коптере плоского аэродинамического экрана. Причём, увеличение подъёмной силы будет проявляться, как при движении коптера, так и при зависании коптера на одном месте.
Привожу рисунок размещения плоского аэродинамического экрана на коптере.
Привожу рисунок воздушных потоков вокруг плоского аэродинамического экрана.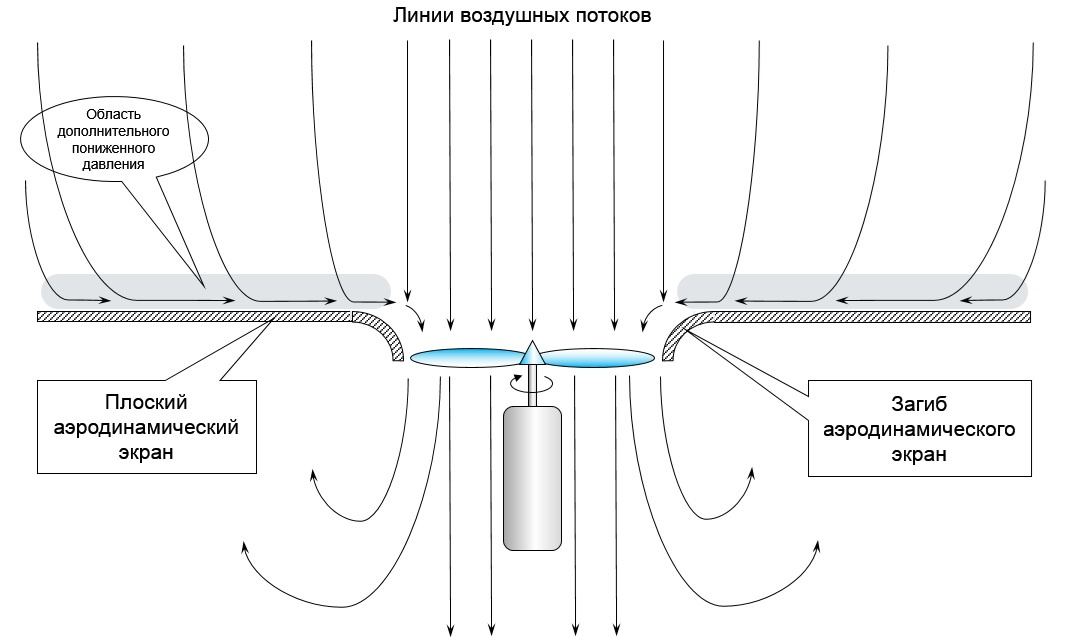
Суммарная площадь отверстий в аэродинамическом экране должна быть близка к площади поверхности аэродинамического экрана, не занятого отверстиями (зависимость получена экспериментально).
Больший эффект увеличения подъёмной силы (на 12%, цифра получена экспериментально) достигается при использовании изогнутого экрана. Привожу рисунок изогнуто аэродинамического экрана.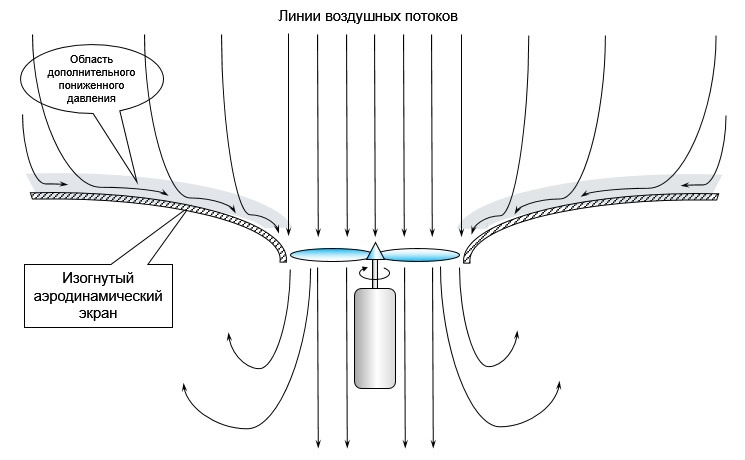
Объясняется данное явление законом Бернулли, в соответствии с которым происходит понижение давление в газовом потоке при увеличении скорости данного газового потока (показано на рисунке).
Т.е. над аэродинамическим экраном устанавливается постоянное пониженное давление за счёт постоянного оттока воздуха с поверхности аэродинамического экрана в отверстия, в которых вращаются винты. Таким образом, дополнительная подъёмная сила (плюс 10…12%) появляется за счёт пониженного воздушного давления над поверхностью аэродинамического экрана.
Как управлять квадрокоптером?
Назначение левого и правого стиков:
Левый стик – отвечает за взлёт и снижение дрона, а так же за вращение вокруг своей оси.
- Throttle Up – газ, увеличивает обороты моторов (при перемещении вверх дрон взлетает).
- Throttle Down — тормоз, уменьшает обороты моторов (при перемещении вниз дрон снижается).
- Yaw Left – при перемещении влево поворачивает дрон вокруг своей оси против часовой стрелки.
- Yaw Right – при перемещении вправо поворачивает дрон вокруг своей по часовой стрелке.
Правый стик – отвечает за «Тангаж» и «Крен» т.е. наклоны дрона на левый и правый бок, а так же вперед и назад (правым стиком пилот задает направление полёта).
- Roll Left – осуществляет наклоны дрона на левый бок (при этом дрон будет смещаться в левую сторону по горизонту).
- Roll Right — осуществляет наклоны дрона на правый бок (при этом дрон будет смещаться в правую сторону по горизонту).
- Pitch Down – при перемещении стика вверх наклоняет дрон вперед (при этом дрон начнёт смещаться в перед).
- Pitch Up –при перемещении стика вниз наклоняет дрон назад (при этом дрон начнёт смещаться назад).
Калибровка каждого регулятора
1. Подключите один из регуляторов к приемнику на канал газа (обычно 3й канал).2. Включите аппаратуру и установите уровень газа на максимум.3. Подключите аккумулятор к коптеру.4. Необходимо дождаться, чтобы регуляторы проиграли мелодию. После двух сигналов резко сбросить газ на минимум.5.
Сейчас вы должны услышать сигналы, по количеству соответствующие подключенной батарее (3 раза для 3S батареи, 4 раза для 4S батареи и т.д.), затем длинный сигнал от регуляторов, означающий, что обнаружен минимальный уровень газа и что калибровка завершена.
Можно попытаться слегка повысить газ, чтобы запустить мотор.6. Отключите батарею. Повторите шаги 1-5 для оставшихся регуляторов.7. Если процесс пошел не так, то необходимо убедиться, что аппаратура выдает сигнал без реверса. По необходимости сделайте в аппаратуре реверс канала газа.
- Многие регуляторы при включении с высоким уровнем газа входят в режим программирования. Уровень сигнала запоминается как максимальный. При перемещении стика газа с минимальное положение уровень сигнала запоминается как минимальный.
- Если после калибровки моторы не начинают вращаться одновременно или вращаются с разной скоростью, то калибровку необходимо повторить.
- Если не получается выполнить калибровку с использованием контроллера APM, то выполните ее вручную (вторым способом) для каждого регулятора.
- Для некоторых регуляторов процедура калибровки отличается. Читайте документацию по регулятору.
- Для более точной калибровки можно подключить все регуляторы одновременно к приемнику. В этом случае будет исключено влияние «плавания» сигнала аппаратуры.
Настройка pid квадрокоптера
Перед настройкой:
- Всегда настраивайте свой квадрокоптер в режиме АКРО (ACRO)!
- Убедитесь, что центр тяжести находится прямо посередине, так как центр тяжести оказывает значительное влияние на то, как хорошо будет летать ваш дрон.
Нет правильного или неправильного способа настройки PID, все, что хорошо работает для вас — и есть правильная настройка. PID настраиваются индивидуально под каждого пилота.
Обычно я всегда начинаю летать на стандартных настройках, а настройки в прошивках Betaflight и KISS хорошо работают для большинства квадрокоптеров.
Когда я летаю и замечаю какое-нибудь нежелательное поведение, я настраиваю конкретное значение и снова проверяю в полете. Если у квадрокоптера много вибраций, можно поиграть со значением PID, предварительно уменьшив все значения до половины или более, чтобы убедиться, что они не слишком высоки для начала.
Каждый раз, когда изменяете значения ПИД, задавайтесь вопросом: «Стало лучше или хуже». Найдите значение, на котором характеристика полета будет наилучшей.
За один раз настраивайте одну ось, сначала крен, потом высоту и затем рыскание. На каждой оси я настраиваю одно значение за раз, начиная с коэффициента усиления P, затем усиления D и, наконец I. Также вам нужно будет постоянно возвращаться к тонкой настройке, потому что одно значение может влиять на другое.
Режимы полёта дрона
Существуют различные режимы полёта в зависимости от установленного в дрон контроллера полёта (ПК/Flight Controller): KK2/Multiwii/Naze32/ArduCopter и другие). Наиболее распространенными режимами являются:
«Acro mode» (Rate mode/Manual mode) — в этих режимах электронные помощники отвечающие за стабилизацию дрона будут отключены. Скоростные показатели достигнут максимальных значений. Пилотирование смогут осуществить лишь продвинутые пилоты.
«Self-level mode» (horizon mode) – в данных режимах электроника отвечающая за стабилизацию дрона (гироскоп, акселерометр) активна, ограниченны расходы (скоростные показатели). Режимы хорошо подходят для обучения пилотированию.
Attitude Holding Mode — данный режим полёта контролируется бортовой электроникой отвечающей за стабилизацию дрона, активна функция удержания высоты, реализованная посредством бародатчика (барометра). Осуществляя полёт в этом режиме, если пилот отпустит стики/джойстики, квад не упадёт, как это могло бы быть при использовании выше указанных режимов, а зависнет на занимаемой в момент полёта высоте.
Пилоту же необходимо будет контролировать горизонтальное смещение/дрейф коптера, например, из-за присутствующего ветра. Режим оценят новички, но все же, не стоит использовать его при обучении пилотированию, так как полученный опыт не будет полноценным.
GPS Attitude Holding Mode – работает при непосредственном участии GPS модуля. Данный режим полёта контролируется бортовой электроникой отвечающей за стабилизацию дрона. Активна функция удержания позиции реализованная посредством GPS. Дрон привязывается к точке координат и позволяет точно зависать без смещения/дрейфа, даже если на него воздействуют внешние факторы, например, такие как ветер.
На практике вы встретите куда больше режимов полёта. Как уже говорилось выше, это зависит от установленного в дрон контроллера полёта. Но алгоритм работы в целом у всех будет схожим.
Советы и типичные ошибки
На первых этапах никогда не запускайте аппарат слишком высоко, особенно в тех ситуациях, когда недалеко от вас находится огромное количество людей. При совершении малейших ошибок техника может не только упасть и сломаться, но также травмировать окружающих людей. Вращающиеся лопасти могут нанести серьезные увечья.
Останавливайте свой выбор на безлюдных местах, желательно не асфальтированных. Таким образом, когда устройство всё-таки упадет, оно не получит сильные повреждения корпуса.
Если вы новичок, никогда не направляйте аппарат сторону рек. Затем, уже после освоения базовых навыков, вы сумеете полноценно пользоваться квадрокоптером над реками, на территории парков и мест, где сосредоточено большое количество людей.
Неопытным пользователям не нужно приобретать дорогостоящие модели. Вне зависимости от аккуратности обучения управлению или места для тренировочных полетов, всё-таки нередко приходится сталкиваться с ситуацией, когда коптеры падают. С другой стороны, техника предлагает широкие возможности для новичков, упрощающих маневрирование в сложных местах – четвертые Фантомы даже анализируют обстановку с помощью бортовых датчиков, предотвращая столкновения.
Перед тем как начать тренировку, заранее убедитесь в том, что аккумуляторная батарея, установленная на борту, полностью заряжена. Категорически запрещается запуск летательных устройств, в которых заряд батареи составляет не более 50%. Во-первых, тренировка окажется непродолжительной, а во-вторых, при наборе большой высоты устройство может полностью разрядиться ещё в воздухе.
Беспилотник — это устройство с простой схемой управления. Набравшись немного практики, вы сами убедитесь в этом.
Триммирование квадрокоптера
Достаточно простой процесс, позволяющий точно откалибровать движения дрона и обеспечить хорошую управляемость в полете. При выполнении процесса обращайте внимание на следующие правила:
- если квадрокоптер клонит влево, то триммировать по рудеру его нужно в правую сторону и наоборот;
- если при полете дрон кивает носом вперед, то триммируем назад и обратно.
Для оценки направления, требующего настройки, достаточно сделать разворот квадрокоптера на 360 градусов по любому из основных направлений. Для этого достаточно потянут правый стик в одну из сторон и нажать верхнюю кнопку.

Перед тем как начать триммирование квадрокоптера нужно помнить, что у современных дронов имеется два режима работы (высокий и низкий расходы энергии), поэтому важно оценить качество его работы в каждом из них по отдельности. Также обратите внимание на правильность сборки самого коптера, так как иногда пропеллеры не крутятся даже при полностью исправных моторах.


, цена 4600 руб")




