
 / Хабр")
- О падениях и, что делать пока ждем посылку
- Almost ready to fly (почти готовый к полету)
- Аккумулятор
- Бокс для зарядки
- Висеть, как вкопанный
- Возможные проблемы и их решение
- Выбор полетного контроллера
- Детали и цены
- Детали с али экспресса
- Компоновка
- Крепим плату питания, регуляторы оборотов
- Крепим полетный контроллер, приемник
- Мини квадрокоптер своими руками
- Моторы и пропеллеры
- Пайка
- Полезная нагрузка
- Полная сборка с нуля
- Пролог
- Самодельный квадрокоптер
- Сборка
- Сборка и настройка железа
- Соединяем все проводами
- Список к покупке:
- Сфера применения
- Требования к бпла
О падениях и, что делать пока ждем посылку
Будьте готовы к тому, что сначала будут падения. А это: сломанные пропеллеры, ножки и камера в моем случае.

Сломанные ножки
Сломанная камера. Кстати, советую дополнительно заклеивать скотчем разъем с флешкой, есть шанс потери при падении
А вот видео с моего самого первого полета:
Чтобы такого не происходило, советую прикупить маленький квадрик для комнатных полетов. За время ожидания скилл управления поднимется очень сильно. Мой выбор пал на Syma X12S. Цена вопроса ~1445 руб.
Almost ready to fly (почти готовый к полету)
Товарная номенклатура подобных моделей весьма велика. Производитель может представлять как все необходимые детали в наборе, так и только некоторые части дрона. К примеру, раму или контроллер работы двигателей. Сборка и покупка недостающих полностью осуществляется силами владельца такого комплекта.
Приобретение подобного квадрокоптера рекомендуется начинающим пользователям. Он позволит ввести человека в основы создания летательного аппарата, при этом достаточно прост в сборке.

Аккумулятор
Для выбора аккумулятора нужно знать какой он должен отдавать ток.
На полном ходу двигатели будут “есть” 30А (7,5А * 4 мотора), а электроника примерно 0,45А (10 Ватт). С учетом небольшого запаса округлим минимальный рабочий ток аккумулятора в 35А. Для Li-Po батарей с высокой токоотдачей в 30С минимальная емкость будет равна 1,2 Ач (35/30), а для более легких Li-Po и Li-Ion с токоотдачей в 10С минимальная емкость 3,5 Ач (35/10).
Как вариант, сборка 6S2P из Li-Ion Sony VTC6 с BMS весит примерно 630 г (при емкости 6 Ач). С этим аккумулятором дрон будет весить 2031 г, что больше оптимального на 135 г, но в пределах максимального. Теперь посчитаем на какое время коптер сможет зависнуть при идеальных условиях.
При общем весе в 2031 г на каждый мотор приходится 508 г. Взглянем на характеристики мотора и найдем потребляемый ток при такой тяге. Он примерно будет равен 1,6А. 4 мотора и электроника дадут в сумме 6,85A (1,6 * 4 0,45). С учетом разрядки аккумулятора до 20% получится (6 Ач * 80% / (6,85 A)) = 0,7 часа или 42 минуты.
Бокс для зарядки
Бокс для зарядки будет сделан из алюминиевого профиля, крепежной фурнитуры и алюминиевых сендвич-панелей. В нем будут установлены роутер, компьютер, погодные датчики и камера с видом на посадочную зону. Я решил сделать покатую крышу из двух створок, чтобы зимой на ней не скапливался снег и не мешал открыванию. Механизм открывания створок до конца еще не продуман, а также не определена система зарядки (нуждаюсь в подсказках).
В следующей статье я расскажу как настроить и запустить дрон через интернет с помощью GUI или командной строки, про варианты систем зарядки из которых я сейчас выбираю, ПО для управления коптером и анализа снимков и почему мой первый полет через интернет продлился так недолго:
Продолжение следует…
Часть 2 про ПО.
Висеть, как вкопанный
Чтобы дрон умел висеть на одном месте и не “плавать”, одного только GPS не достаточно. К сожалению, из-за состояния атмосферы координаты с приемников GPS могут плавать в пределах десятков метров и для сантиметровой точности нужно использовать корректирующие системы
. Эта система использует наземную неподвижную станцию, как эталон отклонений координат, и радиосвязь с бортом, чтобы отправить туда значения этих отклонений. Такая штука обязательно нужна для съемки фотопланов с последующей склейкой в большие карты, а для целей висения на месте я пока ограничусь оптическим датчиком
Работает он по такому же принципу, как и оптическая мышь. В отличие от IR-Lock, он не распознает конкретный образ и в Ardupilot они работают в разных полетных режимах. Изображение с камеры анализируется на смещение 400 раз в секунду, а вычисленные значения смещения могут быть прочитаны контроллером по протоколу I2C. Датчик (
) весит 15 грамм и имеет все необходимое у себя на плате: процессор 168 MHz Cortex M4F CPU (128 64 KB RAM), оптический сенсор 752×480 MT9V034 и 3-х осевой гироскоп L3GD20. Для его нормальной работы также рекомендуется использовать лазерный дальномер, вместо ультразвукового. Хотя на самом модуле предусмотрен разъем как раз для УЗ датчика.
Возможные проблемы и их решение

Если купленный комплект квадрокоптера собран с точностью по схеме, при этом все контакты соединены согласно своей полярности, но он не функционирует – значит проблема в каком-то элементе конструкции. Зачастую это управляющий двигателем контроллер, плата приемника или электронный регулятор скорости.
Определить конкретную проблему можно по реакции на команды с пульта. Если никакой нет вообще, а питание на приемник и передатчик подается, нужно проверить соединение компонентов схемы. Возможно, нет контакта платы приемника с микроконтроллером. Если все в порядке, то поможет только замена неисправного комплекта на функционирующий.
Если реакция на команды есть, но работают не все винты, – причиной может быть плохое соединение между модулем ESC и двигателем или APM. В худшем случае – неисправность мотора, проверить который можно временно подключив его на другую линию луча БПЛА. Соответственно решение – замена компонента, вышедшего из строя – мотора или электронного регулятора скорости.

Ниже представлено видео с описанием сборки комплекта квадрокоптера.
Выбор полетного контроллера
Так как мне нужно транслировать видео и телеметрию через интернет, то сразу приходит на ум поставить на дрон микрокомпьютер с 4G модемом и камерой, и сделать из этого комплекта web-трансляцию. Нашлись вот такие решения:
. Это обычные одноплатники с внешним USB 4G модемом и камерой. Для кодирования и трансляции видео используется
. Но эти штуки сами по себе дроном управлять не умеют, их нужно использовать совместно с полетным контроллером.
Полетный контроллер — это мозг дрона. Он следит за состоянием датчиков положения (гироскоп, акселерометр, компас), GPS-координатами, положением ручек на пульте управления и, исходя из этих данных, управляет моторами, чтобы висеть в одной точке или куда-то лететь.
Полетный контроллер нужно будет как-то связать с бортовым компьютером, чтобы можно было загрузить полетное задание или указать произвольную точку куда лететь и когда включать камеру. В продаже можно найти много разных контроллеров сильно отличающихся друг от друга по цене и функционалу.
С Ardupilot я игрался еще на 8-битных атмегах, в которых не было USB-bootloader’а, а прошивались они на программаторе. С тех пор с ним не сталкивался и был приятно удивлен, когда узнал, что сейчас он может работать на 64-битных компьютерах с Linux, у него огромное сообщество пользователей как хобби, так и профи, длинный список поддерживаемых “из коробки” датчиков и расписанные планы на 2023-2023 годы. За это время он успел перерасти в проект DroneCode, а потом и отсоединиться от него.
На первый взгляд в нем как раз реализованы все необходимые функции: автоматический взлет и посадка, загрузка полетных заданий, есть desktop и мобильные приложения под все основные семейства ОС. Программы управления (GCS — Ground Control Station) общаются с бортовым контроллером короткими сообщениями по открытому протоколу MAVLink через комплект радиомодемов (дрон шлет телеметрию, GCS шлет команды управления). Подозреваю, что эти сообщения получится пустить через интернет.
Взглянем на список поддерживаемых контроллеров и что-нибудь подберем. Вариантов там полтора десятка от мала до велика и с разными характеристиками.
Из всего того многообразия контроллеров мне понравилось несколько вариантов:
Самый легкий комплект (84 г) получается из микрокомпьютера
(9 г), контроллера
(15 г), родного внешнего GNSS модуля (46 г) и дополнительного
(14 г).

Рабочий процессор в этом комплекте один — на Raspberry Pi. На нем висит управление ШИМ регуляторов моторов, считывание показаний датчиков, ОС Linux со всеми потрохами и декодирование видео с камеры. Так как в Pi Zero не предусмотрены USB порты, то в этом варианте приходится использовать внешний концентратор. IMU датчики и вход питания без резервирования.
Следующий комплект (97 г) от гонконгской компании с русскими фамилиями в команде разработчиков — контроллер Emlid Edge (59 г) с GNSS модулем (38 г). GNSS модуль работает по протоколу UAVCAN и дополнительно оснащен магнитометром и датчиком воздушного давления. За ШИМ здесь отвечает отдельный процессор ARM Cortex-M3, ОС Linux крутится на основном ARM Cortex-A53 quad-core.
В контроллере имеется HDMI видеовход, что позволяет подключить к нему напрямую любую камеру с таким выходом, например GoPro 4 или 5. Относительно высокая стоимость объясняется дальнобойными wifi-приемопередатчиками в комплекте (до 2 км с трансляцией HD-видео).
Следующий вариант (98 г) состоит из знаменитого микрокомпьютера Raspberry Pi 3 (45 г) с контроллером-шилдом Navio 2 (23 г) от той же Emlid и внешней GNSS-антенны (30 г). На контроллере стоит отдельный процессор Cortex-M3 для управления ШИМ на 14 каналах и расшифровки входящих SBUS и PPM сигналов от приемника. Он, в свою очередь, управляется через драйвер в ядре ОС Linux, которая крутится на Raspberry.
Контроллер оснащен парой раздельных IMU датчиков (акселерометр, гироскоп, магнитометр) MPU9250 и LSM9DS1, одним датчиком воздушного давления и GNSS-модулем U-blox NEO-M8N, который видит GPS, Глонасс и BeiDou с внешней антенной через разъем MCX.
Детали и цены
Самое важное и минимальное что потребуется для сборки с нуля (первым в списке идет то, что использовал я, затем то что используют многие другие):
| Сам квадрокоптер | ||
|---|---|---|
| Моторы: 4 штуки лучше брать на 1 больше, пригодится | hacker Style Brushless Outrunner 20-22L 924kv | $12.88 |
| hexTronik DT700 Brushless Outrunner 700kv | $10.95 | |
| 2213N 800Kv Brushless Motor | $7.36 | |
| Пропеллеры: минимум 2 стандартных и 2 обратного вращения в начале попыток и испытаний это будет главных расходный материал, поэтому берите сразу много, заодно часть из них будет бракованное и не пригодное для использования | 10X6 Propellers (5шт) 10X6R Propellers (5шт) | $2.40 $3.04 |
| APC 10×4.7 counter rotating propellers set | $8.50 | |
| Регуляторы скорости: 4 штуки покупать надо как и моторы с запасом, может быть брак или случайно сгорит и потом месяц ждать новый | HobbyKing 30A BlueSeries Brushless Speed Controller они же Mystery 30A BlueSeries | $10.47 $13.96 |
| TURNIGY Plush 25amp Speed Controller | $11.81 | |
| Источник питания с увеличением емкости растет и вес, а значит моторы будет больше потреблять, поэтому нет особого смысла брать супер емкий аккумулятор, лучше взять 2-3 мелких и менять их | Turnigy 2200mAh 3S 30C Lipo | $13.79 |
| ZIPPY Flightmax 2800mAh 3S1P 30C | $17.76 | |
| Рама стараемся делать максимально легкой и прочной | 4 алюминиевые трубки или профиль 10х10 и кусок фанерки | разобрать алюминиевый штатив |
| HobbyKing Quadcopter Frame V1 | $14.99 | |
| Мозги и датчики | ||
| Программируемый микроконтроллер | Seeeduino Mega | $43.00 |
| Arduino Mega | $64.90 | |
| Датчики рекомендую сразу брать AllInOne или FFIMU платку, так как остальные датчики очень сильно пригодятся потом | гироскоп ITG3205 акселерометр BMA020 | WMP$7.98 BMA020 230руб |
| All In One (гироскоп ITG3200, акселерометр BMA180, барометр BMP085, магнитометр HMC5883L) | $99.80 | |
| FreeFlight IMU 1.22L | €84.00 | |
| Аппаратура управления и зарядное устройство | ||
| Аппаратура управления минимум 4 канала | Hobby King 2.4Ghz 4Ch Tx & Rx V2 (Mode 2) | $22.99 |
| Turnigy 9X 9Ch (Mode 2) | $53.79 | |
| Аккумулятор к аппаратуре | Mystery 11.1V 2200mAh | $12.72 |
| AA 600mAH Ni-MH Battery Set (8pc) | $1.99 | |
| Зарядное устройство | iMAX B6 2.5″ LCD RC Lipo Battery Balance Charger | $36.50 |
| Turnigy Accucel-6 50W 6A Balancer/Charger | $22.99 | |
| Другое | ||
| так же потребуются проводочки, болтики, винтики, стяжки, дрель, паяльник с паяльными принадлежностями и более-менее прямые руки | ||
| ИТОГО примерно от 220$ | ||
Детали с али экспресса
Один из бюджетных вариантов, представленный на Aliexpress для самостоятельной сборки, без ухудшения функциональности квадрокоптера – Flysky i6 F450. Его цена находится в районе 12086 рублей.
В наборе находятся все компоненты, позволяющие создать собственного дрона, кроме аккумулятора и навесного оборудования – камеры, хотя ее крепление предусмотрено конструкцией рамы устройства.

В наборе идут:
Наименование | Характеристики |
Рама | Четырех лучевая. Материал – стекловолокно и полиамидный нейлон. |
Двигатель | 4 штуки, 53 грамма каждый |
ESC | Simonk 30A, 4 шт. |
Контроллер полета | APM V2.8.0 |
Сенсоры | GPS датчик 8n |
Модуль питания | 5В, 2А |
Винт | 8 штук |
Звуковой сигнализатор уровня разряда | |
Кабели питания и соединения компонентов | |
Передатчик, приемник и пульт управления | |
Аккумуляторов нет. Необходимо докупать самостоятельно. Пользователи, уже купившие этот дрон, рекомендуют 3300 mAh 25c. | |
Для обеспечения съемки квадрокоптером понадобится камера, она приобретается отдельно. В первый, самостоятельно собранный дрон, обычно устанавливают ее версию попроще.
К примеру, хорошо подойдет Wifi камера 5,8G 48CH. Уже в комплекте к ней идет монитор 4,3“, на который и поступает изображение. Цена такого набора – 3705 руб.
Компоновка

Пока я выбирал подходящую раму и думал как все это на ней размещать и чем крепить, пришел к выводу, что проще будет нарисовать несколько деталей и заказать 3D-печать из пластика и фрезеровку из карбона. Пару готовых железок и крепеж можно заказать на Алиэкспрессе.
Немного поэкспериментировав с компоновкой и центром тяжести, получилась вот такая рама:
Она состоит из карбоновых трубок и пластин, деталей из алюминия и крепежа из титана. Расчетный вес рамы получился 350 г при диагонали 700 мм. 3D-модель рамы и список деталей.
Полностью собранная модель (без проводов):
Общий вес коптера с электроникой, аккумулятором Li-Ion 6S2P и проводами должен получится 1931 г.
Да, мне тоже показалось, что дрон получился слишком голым для автономного варианта и мелкий дождик легко намочит бортовую электронику. Поэтому добавил немного пластика:
3D-модель рамы. Список деталей рамы.3D-модель в сборе. Список компонентов.
Вес пустой рамы с корпусом 384 г, общий вес 2020 г, расчетное время висения на одной зарядке (разряд аккумулятора до 20%): 44 минуты.
Крепим плату питания, регуляторы оборотов
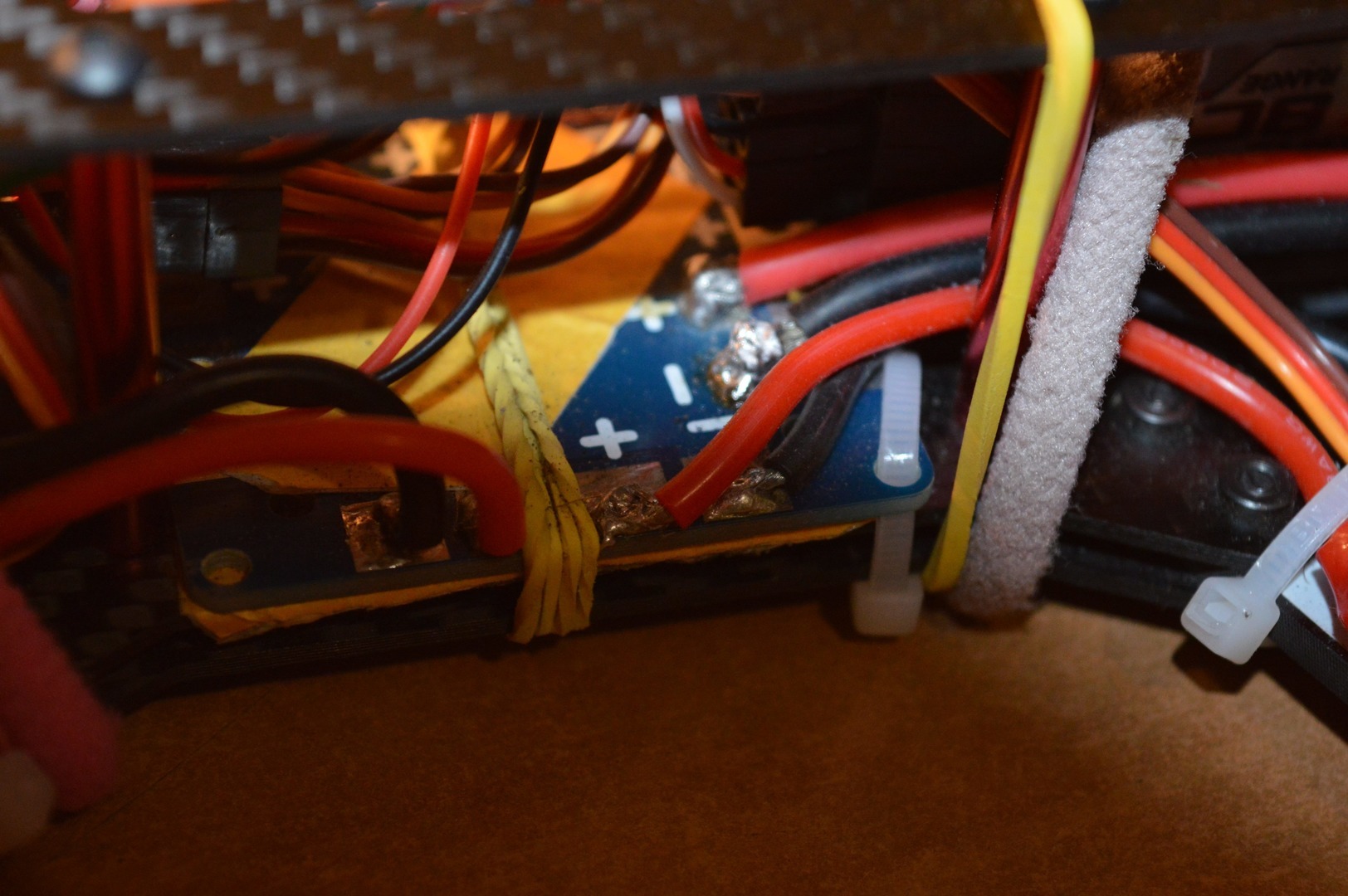
Время крепить. Помните, что рама коптера проводит ток, поэтому плата должна быть изолирована от нее. Я посадил ее на два слоя двухстороннего скотча, с одного края притянул хомутом, а после закрепил резинкой.
Крепим плату. Два слоя двухстороннего скотча хомут резинка
Регуляторы оборотов я спрятал в термоусадку, посадил на двухсторонний скотч, затянул хомутами и для уверенности затянул резинкой. Выглядит более чем надежно

Крепим регуляторы. Термоусадка двухсторонний скотч хомуты резинка
Крепим полетный контроллер, приемник
В дело опять вступают двухсторонний скотч и резинки. Опять же, чем жестче вы закрепит, тем лучше.
У меня это сделано следующим образом:
Крепим полетный контроллер (1). Трава осталась после краша
Крепим полетный контроллер (2)
Крепим приемник. Торцом он тоже сидит на двухстороннем скотче
Мини квадрокоптер своими руками
Привет самоделкины! Так вот в данной статье мы рассмотрим как сделать микро квадрокоптер. Во время создания мы будем стараться использовать наиболее распространённые и дешёвые материалы. К сожалению сэкономить на аппаратуре управления очень сложно, и она является самым дорогим компонентом. При желании вы можете найти аппаратуру попроще и подешевле. Стоит заметить, что здесь мы ограничены по массе квадрокоптера, т.к. двигатели не мощные и чем легче квадрокоптер – тем больше времени полёта и тем полёт манёвреннее. Но не стоит забывать и про прочность. Слишком хлипкая конструкция разрушится при первом неудачном приземлении.
Ниже оставлю ссылки на некоторые запчасти
Для данной самоделки нам понадобится:
1. Немного толстого картона
2. Супер клей
3. 4 Карандаша
4. Пластиковые хомуты
5. Двухсторонний скотч
6. 4 электрических моторчика и лопасти для них ссылка
А здесь можно купить лопасти
7. Платы управления Контроллер полёта
8. Аккумулятор ссылка
9. Пульт управления аппаратура как в статье
Из инструментов также понадобится:
1. Дрель
2. Кусачки
3. Ножницы
4. Линейка
5. Ножовка
6. Наждачная бумага
Ну чтож, приступим к сборке.
Берём карандаш и отпиливаем часть от него. Нужно оставить около 2/3 от длины.
Теперь понадобится дрель, при помощи которой просверлим отверстие ближе к одному из концов карандаша. Диаметр не сильно важен, главное чтобы протиснулся хомут.
Все эти действия проделываем с 4-мя карандашами.
Вырезаем квадрат из картона размером 40х40 мм и размечаем его.
Используя суперклей фиксируем карандаши.
Вырезаем из картона такой же квадратик и клеим его сверху.
Для лучшего эффекта можно посыпать содой места склеивания.
Теперь нам нужно немного обработать концы карандашей (сделать небольшие углубления для моторчиков). После этого с помощью суперклея также их фиксируем.
Дополнительную прочность можно добавить при помощи пластиковых хомутов.
Затягиваем хомут и обрезаем лишние концы. Так делаем со всеми 4-мя моторчиками.
Теперь возьмём плату управления и при помощи двухстороннего скотча закрепим её на верхней части коптера.
Роторы моторчиков смотрят на верх, следовательно с этой стороны и будет верхняя часть.
Теперь паяем провода от моторчиков к плате.
Подсоединяем ещё одну плату и паяем.
Устанавливаем лопасти, подключаем аккумулятор и клеим его на нижнюю сторону коптера.
Включаем коптер и подключаем пульт управления. Настраиваем и всё готово!
Моторы и пропеллеры
На многих профессиональных дронах я видел моторы и пропеллеры компании
. Видимо, не спроста. В документации Ardupilot они также
как силовая установка для профессиональных дронов. Поэтому, поищем подходящие моторы у них.
Чтобы дрон летал долго, нужны моторы с максимальным КПД. Эффективность связки мотора и пропеллера измеряется количеством тяги в граммах на 1 Ватт затраченной электроэнергии. Чтобы узнать какой мотор самый подходящий, нужно знать общий вес полностью собранного дрона с учетом рамы, аккумулятора и самих моторов с винтами.
Слишком много неизвестных, поэтому воспользуюсь онлайн калькулятором для квадрокоптеров E-calc.
Поигравшись в калькулятор, я выбрал моторы Antigravity 4004 KV300 (53 г) с винтами 15х5 (27 г). В оптимальном режиме при напряжении питания 24 Вольта такой комплект тянет 474 грамма при токе 1,4 А. Эффективность получается 14.
11 г/Ватт, отношение тяги к собственному весу = 5.9:1. На полном ходу тяга составляет 1311 грамм при токе 7,5 А. Коптер будет с четырьмя моторами, то есть квадро. Оптимальный взлетный вес = (474 г * 4 мотора) = 1896 г, максимальный (с учетом тяговооруженности 2:1) = (1311 г * 4 мотора) / 2 = 2622 г.
Моторы управляются регуляторами оборотов. Напряжение питания моторов = 24 Вольта, максимальный рабочий ток = 7,5 А, поэтому нужен регулятор под такое напряжение и с рабочим током, с учетом запаса, минимум 10А. У T-Motor самый легкий регулятор (7 г без проводов) под такое напряжение — это FPV 35A-32bit 3-6S.
Подитог:
ВМГ (винто-моторная группа), состоящая из моторов, пропеллеров и регуляторов (по 4 шт каждого) весит 346 г.
Вместе с электроникой и полезной нагрузкой (346 505) получается 851 г. С учетом крепежа, проводов и разъемов (прикинем 100 г) = 951 г.
При оптимальном весе, на раму и аккумулятор остается (1896 — 951) = 945 г. При максимальном (2622 — 951) = 1671 г.
Пайка
Пайка распределительной платы
Итак, вы уже примерились и решили, как у вас все будет установлено. Время паять. При пайке платы самое главное соблюдать полярность! На какие места паять провода не важно, все зависит от того, как вы собираетесь установить плату.
Припаиваем регуляторы и силовые провода. Соблюдаем полярность. (Мой вариант)Припаиваем регуляторы и силовые провода. Соблюдаем полярность. (Другой вариант)
Припаиваем регуляторы к моторам
Первым делом снимаем с регуляторов стандартную красную теромоусадку. Для того, чтобы моторы вращались в нужную нам сторону, регуляторы к моторам следует припаять вот так:
Подключение регуляторов к моторам
Думаю, что у вас возник вопрос: куда деть длинные провода от регуляторов. Их можно отпаять и убрать совсем, а можно обрезать под нужную длину. Второй способ для начинающих предпочтительнее, так как меньше шансов перегреть регулятор при пайке.
Полностью отпаянные штатные провода регулятора. Так делать не советую, лучше просто укоротить провода (не обращайте внимание на расположение проводов, картинка взята, чтобы показать другое. Правильная схема сверху)
Припаиваем T-коннектор. Полярность важна!
Полезная нагрузка
Так как родная камера от Raspberry делает средние по качеству фото, а также не умеет захватывать фото одновременно с видео, то она будет использоваться только для web-трансляции, а в качестве основной камеры нужна подходящая для выявления дефектов на ЛЭП. Для большей части позиций из списка выявляемых дефектов подойдут
, мультиспектральная
, двойная
и инфракрасная
. Каждая из них весит около 100 г.
Для стабилизации камеры с целью улучшения качества снимков в нагрузку с ней полетит 2х или 3х осевой подвес.
Простые 3-х осевые подвесы весят около 160 г и питаются от 12 Вольт, имеют рабочий ток при таком напряжении около 50 мА и максимальный ток 700 мА при заклинивании моторов.
Полная сборка с нуля
Один из самых интересных вариантов, с относительно низкими затратами труда и времени. При выборе компонентов летательного аппарата производят расчеты в зависимости от желаемых характеристик и доступной номенклатуры в продаже.
Имеется в виду, к примеру, что для большого квадрокоптера нужны и габаритные, а также мощные запчасти. Их характеристики непосредственно зависят от планируемого веса дрона. Чем крупнее рама – тем больше масса аппарата, а значит, он должен быть оснащен более высоко оборотистыми двигателями, крупными пропеллерами, а также соответствующей системой питания всей силовой и обычной электроники на борту.
Важной деталью служит и выбор контроллера, который управляет всем этим хозяйством. Он задает скорость вращения винтов, не допуская перекосы аппарата во время полета. К его функциям относится и управление движением дрона, в зависимости от команд оператора на земле.
Не лишним будет контроль характеристик передатчика пульта и устанавливаемого приемника в аппарат. Чем они мощнее, тем на большем расстоянии можно управлять квадрокоптером.
Ну и в конце, навесное оборудование. Без него дрон – не более чем летающая игрушка. А вот смонтировав на его раму камеру с передатчиком, можно найти квадрокоптеру более практичное применение.
Опять же, важна дальность беспроводного функционирования подвеса, его потребляемая мощность (а значит и запас хода батарей всего аппарата). Управляемая камера, с настраиваемым увеличением и яркостью, также даст свой плюс к использованию дрона.
Пролог
Сейчас в интернете можно найти несколько полезных туториалов (все ссылки в конце статьи) на тему того, как самому собрать дрон на 250 раме. Но, собирая свой первый квадрик по этим статьям, я столкнулся с проблемами, которые не были никак освещены. А именно: я не нашел полный лист деталей и дополнительного оборудования, который мне нужен, цену полной сборки, а также некоторые практические и теоретические вопросы. Именно поэтому было решено сделать данную статью
в виде обобщения моего личного опыта и опыта других людей
, дабы помочь новичкам (таким как я) как можно продуктивнее построить свой первый дрон.
1 часть будет посвящена подбору деталей, оборудования, сборке и подключению всех узлов коптера. Программная сторона будет рассмотрена во 2 части.
Сразу отчет о том, что у меня получилось:
На видео заметно, что во время полета у дрона пропали ножки, но об этом позже
Список часто задаваемых вопросов:
В: Не проще ли купить готовый квадрик и летать?О: Проще, только если вы не собираетесь продолжать улучшать свой дрон и строить другие. То есть хотите просто полетать, а не ломать себе голову и тратить дорогое время. Магазинный дрон в любом случае легче в освоении и проще в эксплуатации.
В: Нужно ли паять?О: Да, нужно!
В: Собрать квадрик самому дешевле, чем купить в магазине?О: Нет! Считаю это заблуждением. Если вы новичок, а раз вы читаете эту статью, скорее всего так оно и есть, то кроме деталей для квадрокоптера вам понадобится еще уйма всего. Прилагаю список ниже.
Самодельный квадрокоптер
Можно, конечно, купить дрон в сборе, но это не так интересно, как создать его своими руками, пусть уже и из готовых комплектующих, поставляемых наборами от производителя. К тому же, далеко не каждая готовая сборка будет соответствовать нуждам покупателя.
Самый захватывающий вариант получения квадрокоптера – индивидуальный расчет конфигурации и подборка соответствующих ему комплектующих, с монтажом всего этого в одну конструкцию. Приобрести же необходимые элементы можно, к примеру, на торговой площадке E-Bay или AliExpress, сделав заказ через интернет.

Один из нюансов, учитываемый при изготовлении самодельного квадрокоптера, – ограничения, введенные законодательно на сверхлегкие летательные аппараты. К которым относятся и дроны.
В сущности, они касаются только документальной регистрации квадрокоптеров весом свыше 250 грамм. Если аппарат имеет большую массу, но меньшую 30 килограмм, то ему требуются разрешительные бумаги от Федерального агентства воздушного транспорта. Получить их можно и по почте, отправив фотографию беспилотного летательного аппарата и его характеристики в Росавиацию.
Сборка
Сборка рамы
Есть вероятность, что комплект деталей вам придет без инструкции по сборке рамы. Так было у меня. Если так и произошло, то собираем по картинке или видео. На данной стадии не стоит затягивать все винты в «боевой режим», возможно, придется разобрать раму еще не раз.
 Не забываем про шайбы. У вас конечно же белой пластины нет — это те самые остатки от 3D напечатанных ножек
Не забываем про шайбы. У вас конечно же белой пластины нет — это те самые остатки от 3D напечатанных ножек
Установка моторов
Очень простая операция, если помнить про направления вращения двигателей. Определитесь, где у вас будет перед. Моторы с черной гайкой, вращающиеся по часовой стрелке, ставим на переднее левое и заднее правое места.

Обратите внимание на расположение двигателей
Крепление двигателей
Сборка и настройка железа
Предположим что всё что выше у вас уже есть и можно приступать к сверлению, паянию и скручиванию.
Раму делаем кто во что горазд, главное чтобы расстояние от центра до концов лучей было одинаково, пропеллеры при вращении не задевали друг друга и центральную часть (фанерку), так как на ней будут мозги, датчики и возможно камера. Датчики лучше устанавливать на толстый скотч, силикон или резину, для уменьшения вибрации.
У меня получилось примерно вот так (аккумулятор крепится с другой стороны, на фото старый вариант мозгов коптера с прошивкой
, с которой мне так и не повезло):

не очень красиво, но летает
А теперь внимание косяки, о которые можно споткнутся по незнанию и нужная информация:
- Приемник надо спарить с передатчиком — написано в инструкции
- Регуляторы скорости (ESC) нужно калибровать! Для этого соединяем вместе все 4 ESC: землю (черный) и сигнальный провод(белый или желтый) и оставляем ОДИН провод питания (красный), после чего вставляем это в третий канал приемника, а так же соединяем провода питания и подсоединяем к регуляторам моторы. После этого на включенном передатчике ставим ручку газа (третий канал) в максимальное положение (вверх) и подключаем к регуляторам скорости источник питания, моторы весело пропищат, после чего опускаем ручку газа вниз и моторы снова пищат — ура, мы откалибровали регули
- Часто регуляторы скорости нужно еще и запрограммировать, об этом читайте инструкцию к своим регуляторам, основной момент — увеличить скорость реакции, повысив частоту и выставив режим моментальной реакции, а не постепенного набора оборотов. Это можно сделать как слушая бесконечные пищания, так и с помощью специальных карточек для программирования.
- Чтобы моторы вращались в другую сторону нужно поменять любые два провода местами
- Ставьте пропеллеры в последнюю очередь — они очень хорошо режут руки
- Моторы, как и пропеллеры часто требуют балансировки, для уменьшения вибрации, для этого возьмите обычные стяжки для кабелей и нацепив 1-2 на мотор вращайте и включайте, пока не почувствуете минимальную вибрацию. Более подробно, а так же с видео лучше почитать на специализированном форуме
ПродолжениеPS: надеюсь люди в RC теме простят меня за неточности и поправят где надо.
Соединяем все проводами
Регуляторы к полетному контроллеру
От каждого из регуляторов у нас идет по 3 провода. Сделать нужно следующее: на трех из четырех регуляторах нужно вытащить из разъема красный провод. Подсоединять провода к контроллеру нужно в определенном порядке, об этом будет рассказано в следующей части.
На трех из четырех регуляторах нужно вытащить из разъема красный провод
Приемник к полетному контроллеру
А вот здесь порядок подсоединения проводов к каждому каналу не важен. Нужно лишь правильно подключить провод питания — белый провод ближе к стороне с наклейкой.
Соединяем приемник с полетным контроллером. Провод питания должен быть расположен белым ближе к стороне с наклейкой
Список к покупке:
Для того, чтобы не заморачиваться с подбором основных компонентов, вижу отличную альтернативу в покупке готового набора. Не теряя времени на подбор деталей, вы получите все, что вам нужно.
Все, что вы получите в комплекте. На картинке
не
показаны соединительные провода от контроллера к передатчику
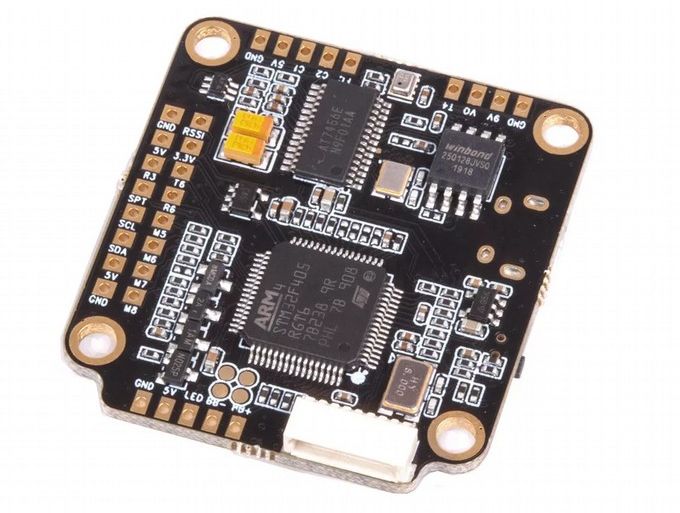
1) Набор деталей с Aliexpress ~4000 руб.1.1 Рама1.2 Бесколлекторные моторы Marspower MX1806 2280KV на 12 А1.3 Регуляторы Emax Simon K Series на 12A1.4 Распределительная плата и провода питания1.5 Полетный контроллер CC3D (мой выбор NAZE 32 FULL.
Его я покупал отдельно, так как CC3D из комплекта сгорел. Разницы в настройке CC3D и NAZE 32 FULL нет. Вот интересная статья о полетных контроллерах).1.6 Соединительные провода от контроллера к передатчику1.7 4 пропеллера (2 левых, 2 правых)1.
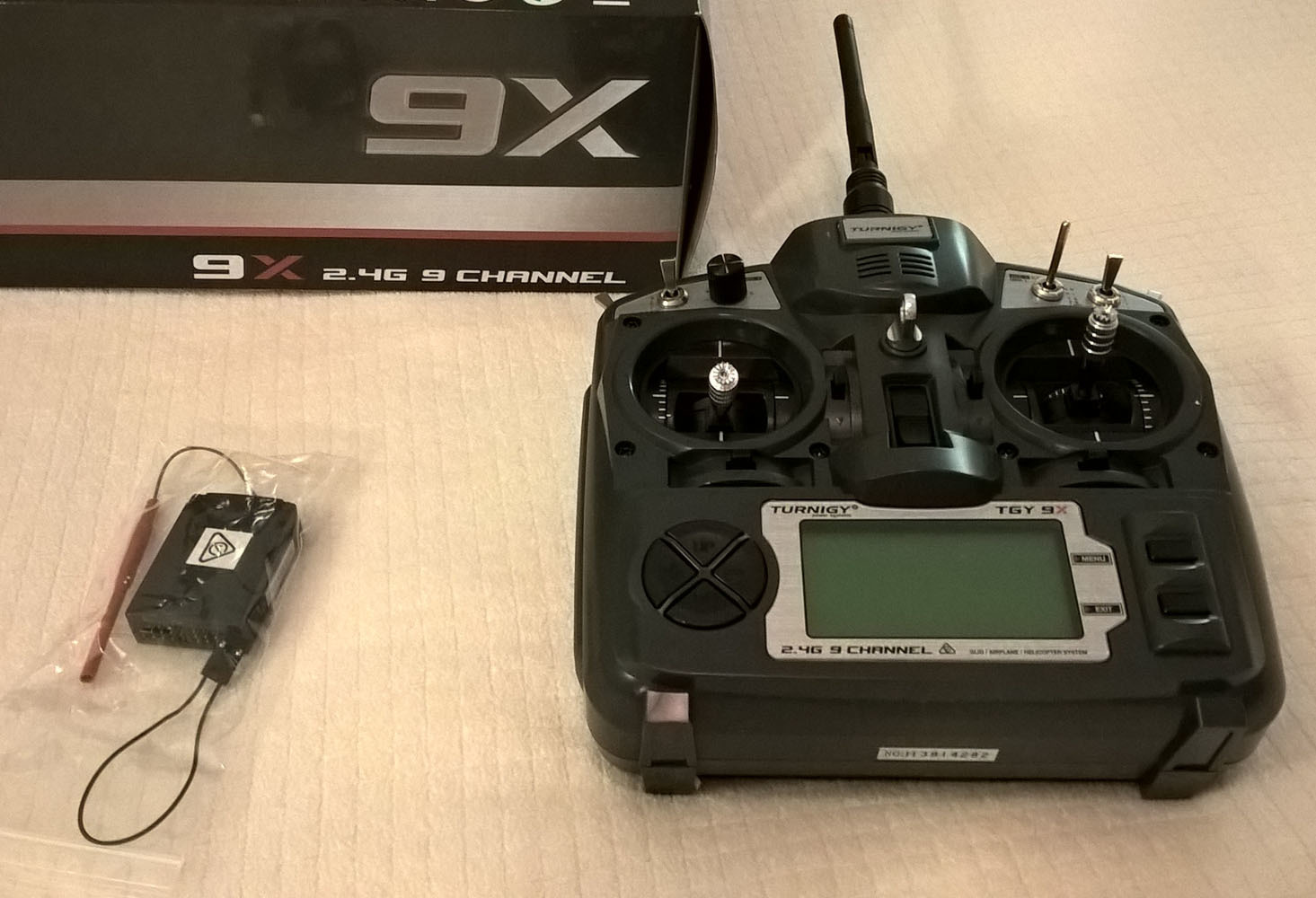
Приемник и передатчик Turnigy 9X
2) Пульт радиоуправления Turnigy 9X 9Ch приемник (все в одном коплекте) ~3400 руб.
В: Почему именно эта модель?О: Во-первых, 9 независимых каналов, то есть огромный запас возможностей на будущее. Во-вторых, огромное количество информации по настройке и прошивке. Очень популярная модель среди моделистов. Но, если вы настроены ОЧЕНЬ серьезно, то советую Turnigy 9XR или 9XR-Pro.
В: Можно ли взять модель подешевле?О: Да, это полностью ваш выбор. Не советую брать аппаратуру меньше, чем с 6 каналами, так как кроме управления необходимо переключать полетные режимы. Кстати, есть готовые наборы уже с аппаратурой, например, такой.
3) Как минимум 2 дополнительных комплекта пропеллеров (в комплекте 4 шт: 2 левых, 2 правых) ~0-100 руб.
Пропеллеры действительно расходный материал при первых полетах, так что лучше взять с запасом. Как ни странно, но с Китая заказывать дороже, да и ждать долго. Максимальный диаметр 5 дюймов. Я купил здесь.
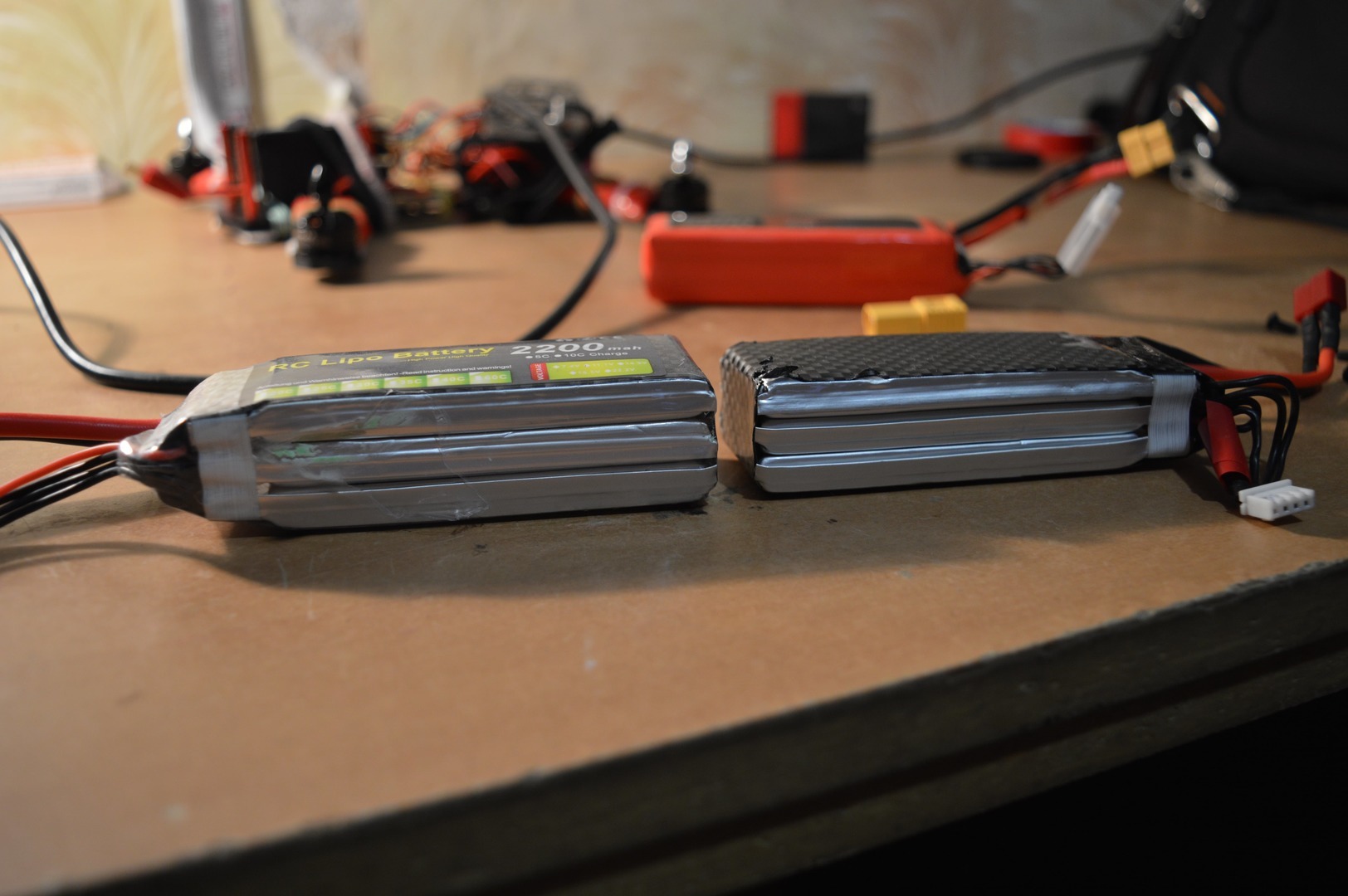
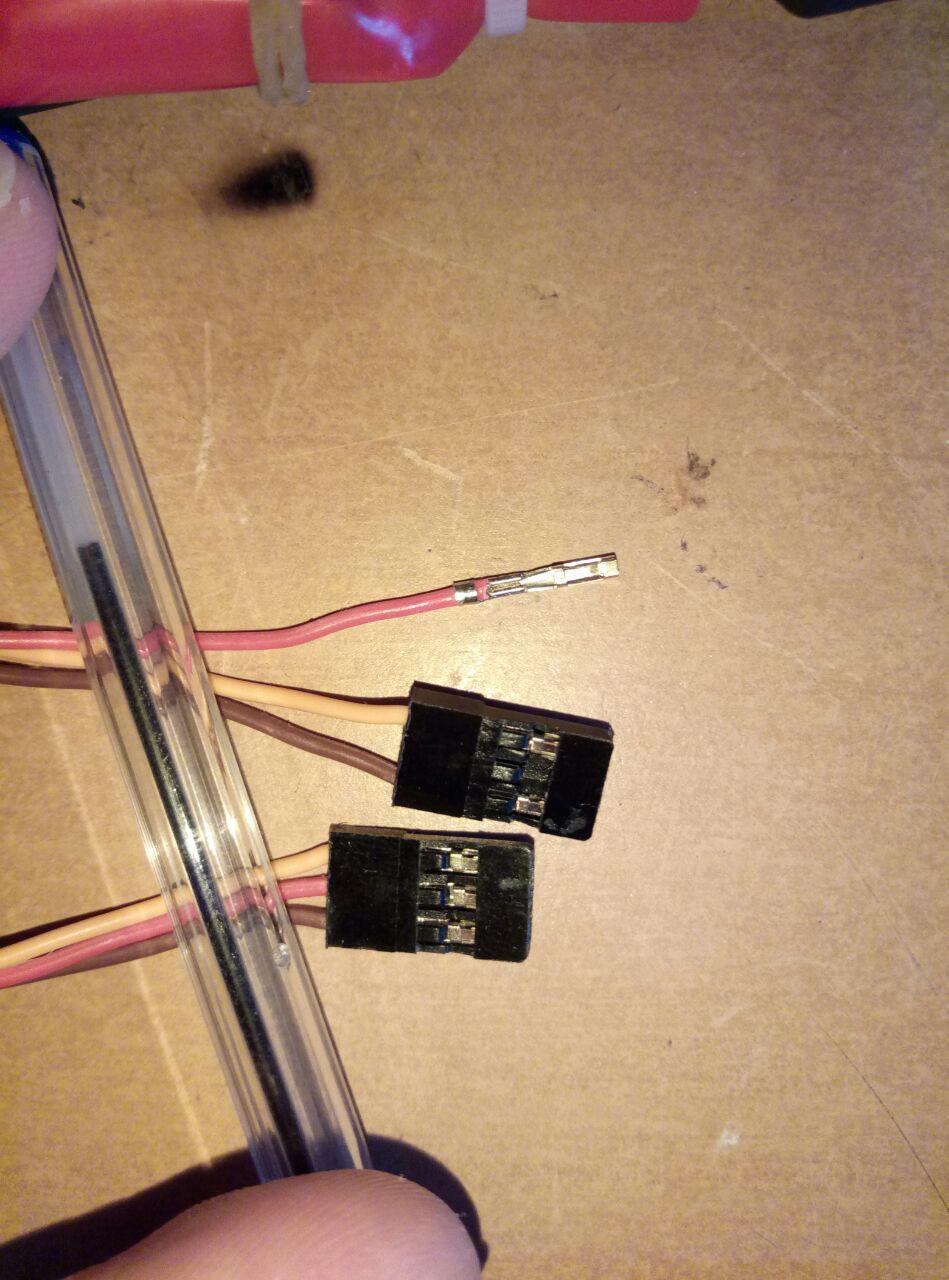
Аккумуляторы с Aliexpress. Оба вышли из строя. У левого отказала вторая банка, у правого — третья.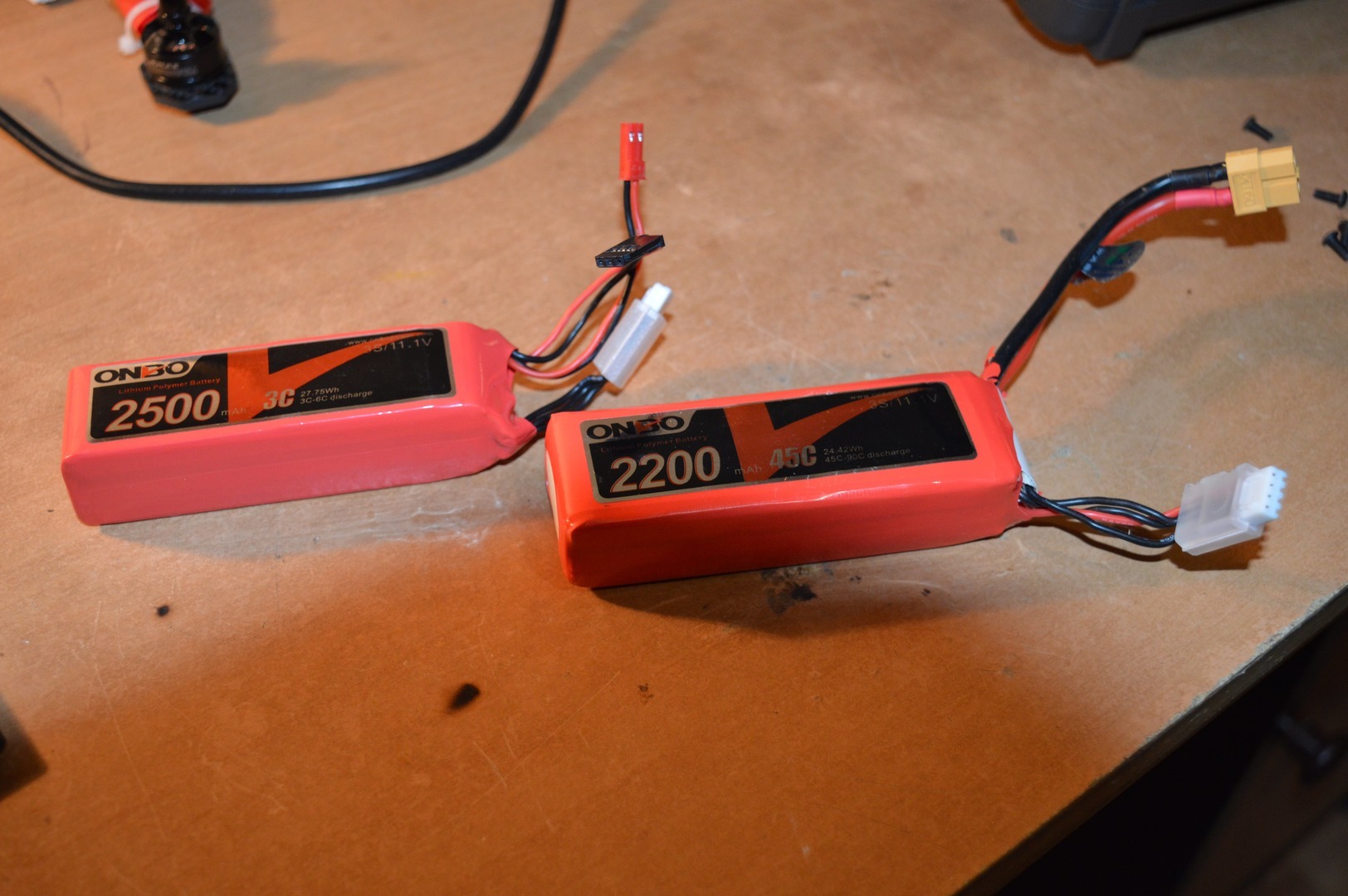
Слева: аккумулятор для пульта радиоуправления с JR разъемом (черная головка). Справа: аккумулятор для питания квадрокоптера
4) Как минимум 1 аккумулятор для питания квадрокоптера, а лучше 2 ~1239-2478 руб.
В: Зачем два? Тебе одного мало?О: Да, мало! Аккумулятора хватает примерно на 10-12 мин полета, а заряжается он 1-2 ч, поэтому, чтобы, войдя в кураж, не идти подзаряжаться, а летать дальше, советую взять пару. Обратите внимание на маркировку аккумуляторов, прочитать про это можно здесь.
Крайне не советую приобретать аккумуляторы из Китая: оба аккумулятора, заказанные мной, вышли из строя, то есть перестали выдавать требуемое напряжение (отказало по одной банке). Да, возможно, дело случая, но с другими аккумуляторами таких проблем не было, да и экономия в 150 руб. не стоит риска.

Turnigy 9X c аккумулятором. Сидит очень плотно, крышка закрывается
5) Аккумулятор для пульта радиоуправления. ~1199 руб.В: Я же уже купил два. Нужен еще один?О: Так точно. Для передатчика нужен специальный аккумулятор с низким током разряда.
В стандартном наборе пульт идет с креплением для батареек, что не приемлемо при частых вылетах. Объясняю: напряжение батарейки теряют быстро, с зарядкой проблема, а стоимость велика. Также стоит обратить внимание на наличие у аккумулятора JR разъема.
В таком случае вам ничего не нужно будет перепаивать. Кстати, если вы собрались покупать другой аккумулятор (не такой как у меня), не поленитесь взять пульт с собой, чтобы примерить его на месте. Мой влезает в стандартный отсек с трудом, но крышка все-таки закрывается.
6) Зарядное устройство для аккумуляторов iMAX B6~1230 руб.
iMAX B6 позволяет зарядить банки аккумулятора равномерно при помощи балансировочного разъема. Самая популярная зарядка.
В: Как этим пользоваться? Какие режимы выбрать?О: Ответы здесь
7) Переходник с XT-60 на T-коннектор ~140 руб.
Если берете такие же аккумуляторы для питания квадрокоптера, как и у меня, вам необходим переходник для зарядки, так как в стандартном наборе iMAX B6 его нет.
8) Индикатор напряжения для 1-8 баночного Li-Po аккумулятора ~230 руб.
Данная штука покажет напряжение по банкам, а также уведомит вас, когда заряд опустится ниже заданного вами уровня, дабы коптер не упал с высоты и батарея жила долго. Видео о том, как пользоваться.
9) Застежка Tarrot 300 мм для крепления аккумулятора (2 шт. в комплекте). Эластичный ремешок 22*200мм для крепления камеры. ~90 50 руб.
Застежки и ремешки сугубо личное дело. То, каким способом будет закреплен аккумулятор и камера, ограничивает лишь ваша фантазия. Обратите внимание на размеры ремешков.

4 винта на 16 мм вместо 8 мм
10) Мелочовка ~ 300 руб.10.1 20 шайбочек под винты на раме и винты, удерживающие моторы. Дело в том, что шляпки у винтов маленькие и при натяге они портят раму10.2 4 винта на 16 мм вместо 8 мм. С помощью таких винтов удалось закрепить еще и ножки, распечатанные на 3D принтере (видео с печати).
Стандартные ножки сломались после одного жесткого приземления, нашел альтернативу в напечатанных. Вообще, высокие ножки полезная вещь при взлете с земли или мокрой поверхности10.3 Термоусадка. Пригодится, когда будете прятать регуляторы10.4 Пластиковые хомуты 10 см (9 шт.)
Для фиксации регуляторов10.5 Двухсторонний скотч, изолента10.6 Винт и гайка под камеру. Ситуция подобная ремешкам — полностью ваша фантазия10.7 Резинки. Пригодятся для фиксации приемника, контроллера, распределительной платы и регуляторов
Защита для пропеллеров, напечатанная на 3D принтере
10.8 Дополнительно: защита для пропеллеров. Печатал ее тоже на 3D принтере. Пригодилась только один раз, когда делал пробный взлет в комнате. После того, как врезался в шкаф, защита разлетелась. Больше ее не использую. Отверстия на защите, кстати, не совпадают с отверстиями на раме. Необходимо либо проделывать самому, либо дорабатывать на компьютере модель.
Всю мелочовку покупал тут1 и тут2.
10) Паяльник само-собой.
Общая стоимость ~11878 — 13217 руб.
Если вы удивлены списком, то стоит заметить, что большая часть всего, что вы купите, послужит вам еще ни один раз.
Также хочу отметить, что цены постоянно меняются, поэтому гарантировать минимальную стоимость по ссылкам я не могу. Уверен, что можно найти дешевле. Я лишь поделился источниками один в один совпадающими с моими.
Сфера применения
Использовать quadrocopter можно и для серьезных целей. Оснащенный видеокамерой и передатчиком, он может передавать изображения с воздуха отслеживаемых объектов. К примеру, местонахождение голов скота на пастбище или состояние крыш и высоких памятников.
В его силах разведывать ледовые или сплавные заторы рек, передавать информацию о пробках и ситуации на дорогах. квадрокоптер используется и при лесных пожарах, давая обзор направления движения огня. В общем, везде, где есть необходимость получения панорамной картинки с высоты – он первый помощник. Включая сферы спасения жизни и поиска людей.
Из остальных очевидных методов применения дрона – переноска им по воздуху каких-либо грузов. Летательному аппарату не страшны плохие дороги или их полное отсутствие, а удаленное управление позволяет использовать его в любую погоду без риска для жизни пилота.

Есть и не очевидные способы применения квадрокоптеров. К примеру, в некоторых крупных торговых центрах летательные аппараты подобного типа производят замену ламп освещения под потолком. Захват выполняется в специальный держатель, после чего дрон вращается, выкручивая светильник, и транспортирует его на землю.
Требования к бпла
А также два противоречащих друг другу требования:
Степень автономности в идеале хочется фантастическую: дрон сам летает по заранее спланированному маршруту, загружает фото на сервер, ПО на сервере выявляет дефекты по фото и формирует заявку ремонтной бригаде с координатами мест проведения работ. Сам дрон не должен требовать к себе внимания человека до окончания рабочего ресурса какой-нибудь детали, например, аккумулятора или подшипников.
Понятно, что эта задача не на один год, но я начну, а кто-нибудь, может быть, подхватит и продолжит.
Для примера, готовые промышленные варианты автономных комплексов: раз, два, три, четыре, пять, шесть, семь, восемь, девять, десять, одиннадцать, двенадцать, тринадцать, четырнадцать.


