

- Что особенного в crossfire?
- Что я о нем думаю
- Что особенного в holybro kakute f4 aio fc?
- Connecting the mpu-9150 to the arduino
- Calibrating the mpu-9150
- Failsafe
- Holybro kakute f4 — plane documentation
- Kakute f4 – полетный контроллер с внешними гироскопами
- Setting up the arduino
- Больше нет sd-карты памяти
- Видеопередатчики, которые поддерживают удаленное управление
- Вкладка configuration
- Вкладка modes
- Вкладка motors
- Вкладка pid tuning
- Вкладка blackbox
- Другие незначительные изменения
- Командная строка (cli)
- Комплект поставки
- Моторы
- Настраиваем betaflight для работы с crossfire
- Настраиваем lua скрипты
- Настраиваем taranis для использования crossfire
- Настраиваем приёмник в таранисе
- Настройка
- Не работает?
- Обзор betaflight f4
- Общая информация о комплекте
- Ограничение
- Питание и батарея
- Подключаем приемник к полетному контроллеру
- Подключение
- Полет
- Полётный контроллер
- Привязываем приёмник crossfire к передатчику
- Регулятор оборотов 35a 4in1
- Режимы
- Рекомендации: проверка безопасности
- Сборка квадрокоптера
- Ставим радиомодуль crossfire в taranis
- Устанавливаем антенну приемника
- Выводы
Что особенного в crossfire?
TBS Crossfire — это популярная система радиоуправления для полетов на дальние расстояния.
Одна из составных частей — внешний радиомодуль, который устанавливается в отсек аппаратуры управления типа Taranis или Nirvana (англ), так что вы сможете использовать весь функционал OpenTX.
Crossfire работает на частоте 900 МГц, более низкая частота означает, что сигнал лучше проходит через препятствия. По сравнению с традиционными системами, работающими на частоте 2,4 ГГц, это дает больший радиус работы и более надежный прием сигнала. Однако есть и недостаток — более длинные и крупные антенны.
Frsky Taranis с двухантенными приемниками (R-XSR и X4R-SB) теоретически дает до 1,5 км, чего более чем достаточно для большинства пилотов мини-коптеров. Однако, иногда хочется полетать подальше, или иметь более надежное управление в условиях, когда есть много деревьев или зданий; вот тут-то и пригодится Crossfire.
Ещё одно преимущество Crossfire над другими системами — меньшая задержка сигнала, что по словам многих известных пилотов заметно улучшает управляемость. Мы говорим о разнице, измеряемой миллисекундами, так что можете заметить, а можете и не заметить её.
Модули и комплектующие для Crossfire:
Не знаете какой модуль выбрать? Вот их сравнение.
Что я о нем думаю
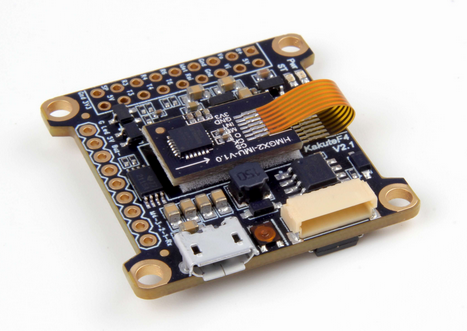
Собран аккуратно, небольшой нюанс — датчик тока припаян не очень ровно. Я проглядел и другие обзоры в интернете, похоже, что у всех так.
Полетный контроллер автоматически обнаружился при подключении ко компьютеру с Windows 10, драйвера установились сразу. В Kakute F4 уже предустановлена прошивка Betaflight V3.20.
- Плата поддерживает SmartPort телеметрию прямо из коробки, безо всяких модов и инвертеров (как было у ранних ПК на F4).
- Нет контактов для земли от регулей.
- Kakute F4 не работает с PPM/PWM приемниками, только SBUS, iBus, Spektrum satellite и т.п.
- Нет выхода 12 В, так что для питания внешних устройств Kakute F4 не подойдет. Придется выбирать: брать питание от аккумулятора или стабилизированные 5 вольт. Со стабилизатором не очень понятно — на странице товара написано, что макс. ток составляет 1,5 А, но в инструкции он указан как 1,2 А.
- Отличная инструкция
Несмотря на то, что это плата «все-в-одном» с кучей функций, она не выглядит массивной по сравнению с другими ПК, вот сравнение с Naze32:
Что особенного в holybro kakute f4 aio fc?
Первое, на что я обратил внимание — это гироскопы.
Это первый полетный контроллер у которого имеется софтмаунт (антивибрационное крепление) датчиков, так что нет необходимости использовать софтмаунт для всего ПК или моторов.
На Kakute датчики вынесены на отдельную плату, которая крепится к основной плате через губку и соединяется плоским шлейфом. Шлейф на вид довольно хрупкий, возможно потребуется дополнительная защита от повреждений при падениях. В любом случае, в комплекте идет запасной шлейф и поролон.
Кроме того, стоит задуматься об эффективности гашения вибраций потому что вес платы очень маленький. Посмотрим на результаты тестов.
В качестве датчиков не привычный нам MPU6000, а высокопроизводительный ICM20689, который может работать с частотой сэмплирования до 32 кГц. Не совсем такой же, но похожий использовался в Raceflight Revolt V2. В настоящее время, при использовании Betaflight большого преимущества нет, но в будущем, когда мы перейдем к более высоким частотам опроса датчиков — Kakute F4 еще пригодится.
Если не считать гироскопов, то у Kakute такой же функционал, как и у Betaflight F3, включая Betaflight OSD и PDB. OSD позволяет пилоту менять настройки и ПИД при помощи стиков. Можно даже менять настройки видео передатчиков типа Tramp или Unify Pro.
Подытожим:
- Софтмаунт датчиков
- Частота опроса гир до 32 кГц
- Наличие Betaflight OSD и PDB
Connecting the mpu-9150 to the arduino
Plugin the soldering iron, we’re about to get down and dirty. You are basically looking at only four wires: power, ground, SDA, and SCL. Ideally, you should already have this mounted in your box or wherever it will be for use, so that it is calibrated in exactly the same spot it will be used. But for this guide, I’m just going to do it at my dining room table. Here’s the wiring guide:
| Arduino | MPU-9150 |
|---|---|
| 3.3V | VCC |
| Ground | Ground |
| SDA | SDA |
| SCL | SCL |
Pretty simple, right? Using the male end of a jumper cable, plug each wire into it’s respective pin on the Arduino. Now, you have to be
very
careful with this next step so you don’t cross solder the pin headers. I strongly recommend you break off four header such that they stay connected to each other, and then solder them into the four pins on the MPU. They’re all right next to each other, so that part works out just fine. But now you have to plan ahead a little bit–my MPU is actually mounted on the underside of the lid of my box. The MPU’s orientation is printed on the board itself, so make sure it’s oriented such that the
Mag X
is pointed to the bow of the boat (please note that it is different than the gyro and accelerometer orientation). Anyways, what this means is that I actually had to solder the pins such that the male prong sticks out the bottom of the chip (since it will be hanging that way when the lid of the box is closed). Confused? Just take a look at the pics to see my setup (ignore the Raspberry Pi and other gadgets).
How do you solder such small connections without spilling solder over to other pins?
Very carefully
. Also, use the little stand that came with the iron to hold it steady! After you solder the pin headers, connect the female end of the jumper cables to their respective pins. And now it’s ready to go!
Calibrating the mpu-9150
We’ve already loaded the code, the MPU is now connected–so all it’s waiting for is to be initiated. To do this, open the Serial Monitor in the Arduino IDE (it’s under Tools), and you should see something like the screen shot here. If you don’t, here’s a few pointers:
Failsafe
Режим сохранения, то есть, то, что будет делать квадрокоптер, если он потеряет связь с пультом управления.
Здесь есть 2 режима:
- Падение;
- Приземление;
- GPS спасение.
- Падение — если выбрать этот режим, то через секунду (настраивается в поле «Failsafe при низком значении газа, где стоит цифра 100) после потери сигнала, дрон отключит все двигатели и упадет.
- Приземление — при потере сигнала будет плавно приземляться, двигатели будут работать. Режим достаточно опасный, к тому же, нужно хорошо настроить обороты двигателей.
- GPS спасение — если вы установили на свой квадрокоптер GPS-модуль, то с его помощью можно настроить возврат квадрокоптера.
Если кратко, функция экстренная и созданная с целью вернуть управления квадрокоптером, а не его посадить, потому что нет дополнительных датчиков. Функция сработает, если вы улетите на расстояние не менее 50 метров (если не ошибаемся, то минимум можно установить 30 метров от точки взлета). Сажать дрон с помощью данного модуля не советуем, так как он ударит дрон о землю (нет других датчиков).
Вся задача модуля — в случае потери связи или, если вы засомневались в своих силах управления на дальнем расстоянии, активируете функцию GPS Rescue (либо она автоматически активируется), дрон поднимется на определенную высоту и полетит в ПРИМЕРНУЮ точку взлета. Главное, чтобы вы смогли перехватить управления на себя и не потерять/разбить дрон.
Обычно включают режим «Падение», так как с «Приземлением» непонятно где он будет приземляться с работающими винтами, а вдруг там будут люди?
Но если выбрали «Приземление», нужно настроить скорость вращения моторов, которые позволят плавно ему спускаться.
Блок «Failsafe переключатель» выполнит действие при активации тумблера, который присваивается функции на вкладке «Режимы». ПРи активации тумблера, выполнится сценарий Этапа 2.
Holybro kakute f4 — plane documentation
above image and some content courtesy ofHolybro
Kakute f4 – полетный контроллер с внешними гироскопами
Как вы могли заметить, я имею страсть ко всему новому:) По этой причине отслеживаю появление новых прогрессивных моделей полетных контроллеров с быстрыми гироскопами. Первой опробованной моделью был
Matek F405-OSD
. Настала очередь следующей модели –
Holybro Kakute F4
!
Примечательной особенностью данного полетного контроллера является отдельная плата гироскопов, установленная на виброразвязку.
Краткие характеристики полетного контроллера Holybro Kakute F4:
Полетный контроллер
Holybro Kakute F4
приехал в пластиковой коробочке, что порадовало.
Внутри обнаружился сам полетный контроллер, запасной шлейф для подключения гироскопов и три запасных демпфера.
Все необходимые выводы расположены на одной стороне полетного контроллера, там же стоят и гироскопы.
С обратной стороны стоит процессор и микросхема OSD. Сначала был обескуражен тем, что для OSD используется микросхема MAX7456. С ней было много проблем, связанных с питанием от пяти вольт, о чем
рассказывал раньше
.
Но здесь немного другая схема. Микросхема питается не от общего импульсного BEC на 5 вольт, а от отдельного линейного стабилизатора на 200mA. Это обеспечит стабильную работу OSD, но из-за такого решения плата полетного контроллера довольно сильно нагревается. Странное решение. Что помешало поставить
AT7456E
с питанием от 3.3 вольта? Кстати, для питания гироскопов так же стоит отдельный линейный стабилизатор.
Гироскопы установлены на мягкий демпфер и ощутимо возвышаются над платой полетного контроллера. Из-за них общая высота блока получается порядка восьми миллиметров. Используются гироскопы
ICM20686
, чуть менее чувствительные, чем
ICM20602
, которые стоят на
Matek F405-OSD
.
Чем хороша или плоха установка гироскопов на отдельный демпфер? Хороша тем, что полетный контроллер можно устанавливать на жесткие стойки. На этом преимущества заканчиваются:) Теперь о плохом. На мой взгляд, демпфер мягковат. В ранних версиях Kakute F4-AIO был еще более мягкий демпфер. Это чревато тем, что при резких маневрах плата гироскопов будет уплывать на демпфере и управление квадриком местами будет не совсем такое, как ожидалось. Демпфер предназначен для фильтрации только низкочастотных шумов. То есть, его можно сделать намного более жестким. Даже тонкий слой силикона или обычный толстый двухсторонний скотч будут работать. Зато не будет проблем с уплыванием гироскопа. Следующая проблема – плата гироскопов может отклеиться. Из-за установки микросхемы MAX7456, полетный контроллер ощутимо нагревается, местами аж до 53-54 градусов! Из-за такой температуры клеевой слой демпфера теряет часть своих свойств. Да и в холодном состоянии я без проблем отклеивал плату гироскопов. При авариях плата может легко отвалиться, поэтому в комплекте есть запасной шлейф:) Чтобы такого не произошло, надо как-то еще и сверху зафиксировать плату гироскопов. Можно резинкой от денег, но это уж совсем колхозно. А можно поставить полетный контроллер гироскопами вниз и снизу сделать еще один мягкий демпфер, который будет упираться в PDB или блок регуляторов – гироскопы будут висеть между двух демпферов. Или сделать еще проще – жестко приклеить гироскопы к плате, а плату установить на обычные резиновые стойки, как Matek F405-OSD. В общем, с внешними гироскопами получается больше проблем, чем пользы:)
Не стал испытывать судьбу, убрал стоковый демпфер, промазал контактным клеем текстолит на плате и гироскопах, сделал демпфер из обычного толстого двухстороннего скотча. Уверен, что этого будет достаточно для нормальной работы гироскопов и они не отвалятся при аварии.
Чтобы разобраться, что и как подключается, пришлось заглянуть в инструкцию. Кстати, там есть еще много полезных советов по использованию полетного контроллера Holybro Kakute F4.
Выводов UART-T1/R1 нет на плате. Они используются для Smartport-телеметрии приемников FrSky. Вывод SP уже инвертирован, так что использовать SOFTSERIAL не нужно – это плюс. Приемник рекомендуется подключать к UART3, а для управления передатчиком использовать UART6.
Полетный контроллер Holybro Kakute F4 питается непосредственно от аккумулятора. Это очень хорошее решение, потому что позволяет обойтись без PDB и использовать любой блок регуляторов 4-в-1. То есть, отдельный BEC на 5 вольт не нужен. Встроенный BEC на 5 вольт может выдержать ток до 1.5А. Этого хватит для питания приемника, светодиодов и пищалки. На камеру лучше подавать питание с передатчика. Как правило, у большинства из них есть выход на 5 вольт.
К полетному контроллеру Holybro Kakute F4 можно подключить светодиоды, пищалку, есть вход RSSI и вход для данных с датчика тока. Из шести выводов под моторы, два свободных можно использовать по своему усмотрению. Например, для управления настройками курсовой камеры, о чем расскажу как нибудь позже.
В полетный контроллер Holybro Kakute F4 лучше заливать тестовую версию прошивки BetaFlight 3.2.0, тогда он сможет максимально показать, на что способен! И регуляторы на BLHeli_32 с DShot1200 будут не лишними:) Прошивку надо заливать с полным стиранием памяти!
Коротко пробегусь по настройкам. Просто использовал часть текущих настроек от прошлого квадрика на
Matek F405-OSD
.
В портах, если планируется использовать приемник FrSky с телеметрией, надо включить SmartPort на UART1. Сам приемник по S.BUS подключается на UART3. На UART6 надо включить TBS SmartAudio для управления передатчиком, типа
Matek VTX HV
.
Сразу же реверсировал вращение моторов и выставил DShot1200. Частоту включил 16/16, при этом загрузка процессора всего 21%. Пробовал 32/16, но загрузка сразу же улетала на 100%, 32/32 даже не пытался ставить, и так понятно, что не заработает. С оверклогингом при 32/16 загрузка процессора всего 33%, а вот 32/32 даже с оверклогингом дает 100% загрузки. Так что, оптимально для
Holybro Kakute F4
будет 16/16 или 32/16 с оверклогингом, но на свой страх и риск.
В настройках PID поднял Anti Gravity Gain и немного увеличил D Setpoint Weight.
Включил тип D-Term фильтра PT1 и обнулил все режекторные фильтры. Пусть динамические работают:)
OSD заработало без проблем при подключении полетного контроллера к USB-разъему. Причем, напряжение на чипе MAX7456 было 4.91 вольта.
Один параметр не хотел устанавливаться из конфигуратора, видимо это небольшой баг. Нужно выбрать для черного ящика тип “Onboard Flash” и поставить частоту в 1кГц, не больше.
set blackbox_device = SPIFLASH
Остальные настройки сугубо индивидуальны. На всякий случай, приведу свой файл предварительной конфигурации.
Полетный контроллер Holybro Kakute F4 пойдет на какой-нибудь квадрик с блоком регуляторов 4-в-1. Скорее всего, это будет очередной крест с кабинкой Lumenier. Из всего многообразия регуляторов подойдут пока что только X-Racer Quadrant 2-6S 35A. И под кабинку влезут, и DShot1200 могут, и телеметрию с датчиков тока смогут отдавать. Других вариантов пока не нашел. Просто хочется сравнить два квадрика на одинаковой раме, но с разной начинкой. Особенно интересно, получится ли заметить разницу в работе гироскопов ICM20686 и ICM20602.
Setting up the arduino
This part is pretty simple. Head over to
the Arduino Getting Started page
and get familiar with the Arduino. In a nutshell, you download their IDE program, write your code in said program, upload it to the Arduino, and then use the program’s Serial Monitor to make sure it’s working correctly. But since we wan’t to do more than just make the little LED light blink (which is a good starter program, I think), we have to include
Libraries
that tell the Arduino how to interface with other devices… such as the MPU.
Problem is, it’s really difficult to find a good Library for the MPU that spits out the information I need, but doesn’t require a separate computer program to decode in the information. It all has to be contained in the Arduino, since this is going on my sailboat and it won’t be hooked up to my laptop. The reason why this is a particularly important issue to resolve is because the MPU is pretty worthless without calibration, and the calibration data needs to be saved on the Arduino itself. Most Libraries and calibrators save the data on your end machine to filter the output before you do anything. Like I said before, that’s not going to work for our application.
Fortunately, there is a library out there that does exactly that. It’s Richard Tech’s RTIMULib-Arduino, specifically for the Arduino, available at GitHub. This is a pretty simple library that saves the compass calibration data to the Arduino’s EEPROM, or it’s “read-only but writable memory.” But if you go to the GitHub page, you’ll see that in big bold letters it says, “Please note that this library is no longer supported.” Don’t panic. That’s totally fine. And just in case something happens over there, I’ve uploaded the library here, which is the exact copy I’m using. Please note, however, that you should always go to the GitHub page for the most recent software and that there’s no guarantee mine will work with updates.
So go over to the RTIMULib-Arduino GitHub page and click the “Download Zip” button on the right side (or just download the zip above). Unzip and copy its contents over to your Arduino folder such that it looks like the screenshot here. Next, open up the Arduino IDE, open up the “sketch” (which is the fancy term for program) titled “ArduinoMagCal.ino” which is in the ArduinoMagCal folder. Ensure your Arduino is connected to your laptop (and you should have already made sure you can upload code when you went through the starter guide at the Arduino’s website), and click the right arrow at the top to upload the sketch to the Arduino.
Great, now the code is loaded onto the Arduino–we just have to connect the MPU itself for it to work.
Больше нет sd-карты памяти
В F3 версии память была внешней посредством подключения SD-флешки к слоту, но в F4 решили убрать слот и интегрировать флеш память в саму плату, теперь у четверки встроенная память. С картами памяти в F3 были проблемы, часто происходили ошибки распознавания и записи данных, поэтому чтобы избавиться от этой проблемы, память просто интегрировали в плату. SD-карта у полетников нужна в качестве черного ящика (BlackBox).
Видеопередатчики, которые поддерживают удаленное управление
Есть несколько разных протоколов управления видеопередатчиками, они позволяют менять настройки как с аппаратуры управления, так и через Betaflight OSD.
Однако большинство производителей видеопередатчиков используют либо «Tramp Telemetry«, либо «SmartAudio«. Ниже список довольно новых видеопередатчиков, поддерживающих эти протоколы:
Tramp Telemetry:
SmartAudio:
Все эти протоколы нужны для одного и того же, и настройки в Betaflight Configurator’е будут идентичными, за исключением одного параметра, где вы выбираете необходимый протокол.
Вкладка configuration
- Раздел ESC/Motor Features
Протокол регуляторов скорости (регуляторов оборотов) — посмотрите на характеристики вашего оборудования, какие протоколы оно поддерживает. Рекомендуется использовать DShot. Обычно регуляторы с прошивкой BLHeli_S поддерживают DShot300 или DShot600, а с прошивкой BLHeli_32 — даже DShot1200.
Дополнительная информация: протоколы и прошивки для регуляторов скорости.
Рекомендую отключить параметр «MOTOR_STOP«, иначе вы не сможете определить армлен коптер или нет.
Остальные параметры можно не трогать и оставить значения по умолчанию.
2. Раздел System Configuration
Looptime — время цикла, с этой частотой полетный контроллер рассчитывает полетные параметры, значение зависит от возможностей процессора, на шумных коптерах я предпочитаю использовать довольно низкую частоту 2 кГц, а на качественных коптерах — частоту повыше — 8 кГц. В любом случае, для начала подойдет и 2 кГц.
Gyro Sampling Rate — частота опроса гироскопов, обычно совпадает с looptime, хотя некоторые предпочитают поставить удвоенную частоту looptime. Можете поставить 4 кГц и looptime 2 кГц.
Потом поэкспериментируете и выберете наиболее подходящие значения, жестких правил по их выбору нет.
При смене значений этих параметров обратите внимание на CPU load (загрузка процессора) внизу экрана, старайтесь держать это значение меньше 30%. Если значение будет выше, то полетный контроллер может работать нестабильно.
Accelerometer — можно отключить, это высвободит немного процессорных ресурсов, но тогда вы не сможете использовать режимы Angle и Horizon, а 3Д модель на вкладке Setup перестанет двигаться. Еще одна причина по которой отключают эту функцию — чтобы избежать проблем при арминге коптера, если он сильно наклонен.
Отключите Barometer и Magnetometer, они нам не нужны, т.к. мы летаем на миникоптере.
3. Раздел Personalization
Craft name — название коптера, это значение будет отображаться на экране при помощи Betaflight OSD.
4. Раздел Receiver
Если у вас приемник SBUS, IBUS или Spektrum Satellite, тогда выбирайте «Serial-based receiver» в выпадающем списке «Receiver Mode». В параметре Serial Receiver Provider нужно выбрать SBUS, т.к. у нас приемник FrSky.
Если приемник использует PPM, тогда выберите PPM RX Input в списке Receiver Mode.
5. Раздел Other Features
Обычно я включаю нижеуказанные функции Betaflight. Если вы не уверены в том, нужны ли они, просто оставьте значения по умолчанию, они не помешают первому полету.
- Anti-Gravity
- Dynamic Filter
- Telemetry (чтобы работала SmartPort телеметрия)
- OSD (если ваш ПК поддерживает Betaflight OSD)
Нажмите Save & Reboot.
Вкладка modes
Тут мы настраиваем полетные режимы и их активацию при помощи дополнительных (AUX) каналов управления (тумблеры на аппаратуре управления):
- Arming (арминг, включение коптера/моторов)
- Airmode (управляемость коптера при 0 значении газа)
- Angle mode (режим полета без автовыравнивания)
- Beeper (пищалка)
Я предпочитаю активировать Airmode тем же тумблером что и арминг коптера, а не отдельным, но это дело вкуса.
Вкладка motors
Проверим порядок моторов:
- мотор 1 — сзади справа
- мотор 2 — спереди справа
- мотор 3 — сзади слева
- мотор 4 — спереди слева
Если у вас другой порядок моторов, тогда его нужно поменять при помощи переназначения ресурсов (Resource Remapping).
Подробная инструкция по переназначению ресурсов
Теперь проверьте направление вращения моторов, его можно поменять в BLHeliSuite.
Инструкция: подключаем BLHeliSuite (конфигуратор для регуляторов скорости) через полетный контроллер
Вкладка pid tuning
Для первого полета здесь ничего менять не нужно. Но настройка ПИД коэффициентов и рейтов может помочь летать лучше.
ПИД — это по сути 3 коэффициента для каждой оси: крен (roll), тангаж (pitch) и рысканье (yaw). Настройка этих коэффициентов подразумевает, что вы понимаете, как они влияют на летные характеристики.
Вот моё руководство по настройке ПИД (англ).
Rate, Super Rate и Expo — определяют то, как резко коптер будет реагировать на движение стиков.
Руководство по настройке Rate, Super Rate и Expo
Вкладка blackbox
Черный ящик нужно для того, чтобы записывать все данные полета — телеметрию. По мере того, как вы будете набираться опыта, журнал черного ящика будет вашим лучшим другом по настройке своего дрона. Blackbox по умолчанию включен. Данные будут писаться либо во встроенную флеш-память, либо на внешнюю SD-карту.
У всех современных полетных контроллеров есть своя память и это как минимум 16 мегабайт. Этого вполне хватит, чтобы записывать логи полета.
Другие незначительные изменения
ESC Telemetry Pads (контакты для телеметрии с регуляторов оборотов) — если у вас регуляторы марок KISS и BLHeli_32, то вы можете напрямую подключать их телеметрию к контроллеру, не придумывая иные способы подключения.
RX Voltage — (напряжение бортовой сети) в F3 нужно было припаивать провода отдельно, а в F4 для этого сделаны специальные выходные контакты.
Наличие Voltage Regulator / BEC (Battery Elimination Circuit) который преобразовывает ток с аккумулятора в напряжение 1.5А для питания внешних устройств на квадрокоптере. Теперь видео передатчик рекомендуется подключать к этому регулятору, либо к VBAT.
Командная строка (cli)
Через командную строку можно влиять на какую-либо информацию в прошивке, вносить изменения, а также выводить информацию о каком-либо параметре или компоненте. Список команд большой и выводится по команде «help». Все рассказывать здесь не будем, так как у нас опять есть отдельная статья по командной строке, если вам интересно, то ссылка ниже.
Комплект поставки
Комплект для установки на квадрокоптер – AuroraRC C2, включает в себя: полетный контроллер на базе процессора F4; плату регулятора оборотов бесколлекторных электромоторов; шлефы для подключения камеры, приёмника и регулятора; комплект крепления к раме квадрокоптреа с демпфирующими вставками; электролитические конденсаторы – 2200µ/25В и 470µF/16В; пигтейл – MMCX/SMA.

Моторы
На этой вкладке проверяется работоспособность двигателей:
Перед любыми действиями, обязательно снимайте пропеллеры с двигателей!
Перед тем, как покрутить двигатели ползунками, переключите флажок «я понимаю всю опасность», чтобы активировать функционал. Теперь можете подвигать ползунки, моторы начнут крутиться: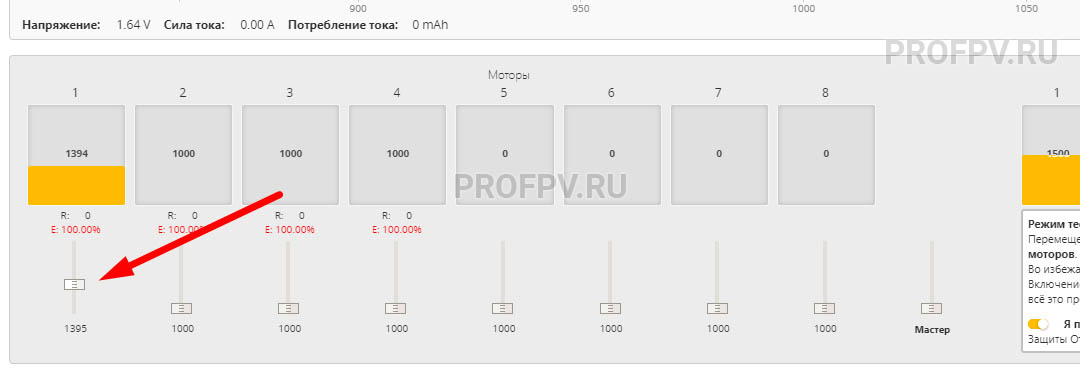 Чуть выше располагается график гироскопа, а также информация о том, сколько потребляют двигатели тока, а также силу и напряжение. Все это служит для проверки и настройки двигателей.
Чуть выше располагается график гироскопа, а также информация о том, сколько потребляют двигатели тока, а также силу и напряжение. Все это служит для проверки и настройки двигателей.
Настраиваем betaflight для работы с crossfire
Заключительный этап — настройка Betaflight.
Переходим на вкладку Ports в Betaflight Configurator, включаем «Serial RX» на том порту, куда подключен Crossfire приемник. Нажимаем «Save«.
Открываем вкладку «Configuration«, в разделе «Receiver» выбираем «Serial-based receiver«, и затем, ниже, «CRSF«.
Не забудьте включить телеметрию (Telemetry) и нажать «Save«.
Последний шаг, переходим на вкладку «Receiver«, тут вы должны видеть реакцию на движения стиков. Это значит, что приёмник работает! Если реакции нет, тогда попробуйте проверить и поменять «Channel Map» (см выше).
Проверяем конечные точки (1000 и 2000), затем средние точки (1500), читаем тут про настройку.
Стики не двигаются? Возможно, включена инверсия сигнала. Попробуйте дать команду в консоли:
set serialrx_inverted = OFF
Если ничего не работает, возвращаемся к началу инструкции и проверяем провода, настройки Output Map, и параметры Betaflight.
На этом всё, Betaflight настроена для работы с Crossfire! 🙂
Чтобы убедиться в правильности работы телеметрии перейдите на страницу Telemetry в аппаратуре управления, затем выберите пункт «Discover new sensors», после этого должны появиться новые данные, включая VFAS — напряжение аккумулятора.
Настраиваем lua скрипты
На пульте можно запустить LUA скрипты для изменения кучи параметров Betaflight, например: PID, рейты, looptime, параметры фильтров, канал видеопередатчика и его выходную мощность!
Настройка практически такая же, как и для SmartPort, только не нужно менять настройки Betaflight, т.к. мы это уже сделали (например, включили телеметрию). Единственная вещь, которую нужно сделать — загрузить LUA скрипты в Таранис!
Настраиваем taranis для использования crossfire
Создаем новую модель в передатчике. Проще всего сделать копию существующий и переименовать ее, например, в Crossfire. Если хотите создать модель с нуля — вот инструкция (англ).
Кратко нажимаем Menu, переходим на страницу Model Setup, перемещаемся вниз до «Internal RF» (внутренний модуль) и выбираем режим «OFF» (отключить).
Далее настраиваем параметр «External RF» (внешний модуль), ставим «CRSF» и меняем параметр Channel Range (диапазон каналов) на «CH1-16«.
После того, как вы это сделали и вышли из меню, модуль Crossfire должен включиться (на нём загорятся светодиоды).
Настраиваем приёмник в таранисе
После привязки приёмника можно настраивать как передатчик, так и приёмник при помощи LUA скриптов. Если вы не видите пункта «XF Micro/Nano RX», это значит, что приёмник не привязан или выключен.
Первое что нужно сделать — это настроить выходы на приёмнике, чтобы он мог обмениваться данными с полетным контроллером.
Чтобы это сделать, выбираем «XF Micro/Nano RX«, прокручиваем вниз до «Output Map» (карта выходов) и выбираем «Output 1» = «CRSF TX«, а для «Output 2» ставим «CRSF RX«. Всё! 🙂
Теперь настраиваем передающий радиомодуль.
Самое важное — убедиться, что выбран правильный частотный диапазон, в США это 915 МГц, а в Европе — 868 МГц. Если использовать не тот диапазон, то результат будет не очень надежным, а сигнал слабым и некачественным.
Для типичной конфигурации коптера в большинстве случаев будет достаточно 250 мВт выходной мощности. А автоматическое изменение мощности (Dyn. power) можно отключить.
Начиная с версии 2.4. максимальная выходная мощность Micro-модуля увеличена со 100 мВт до 250 мВт (англ).
Параметр Mode — задает число каналов, при использовании 8 каналов задержка при передаче сигнала будет меньше, чем при использовании 12 каналов. Убедитесь, что телеметрия включена, а failsafe в режиме Cut, т.е. моторы остановятся в случае пропадания сигнала, а коптер просто упадет, что минимизирует риски.
Настройка
Прошивать полётный контроллер необходимо таргетом – OMNIBUS4SD. По умолчанию контроллер был прошит старой прошивкой 3.2.2 OMNIBUS4SD. Я обновил прошивку до стабильной версии 3.5.0.

Для работы приёмника по шине SBUS активируем Serial RX на UART6. Для UART3 устанавливаем IRC Tramp – удалённое управление настройками передатчика.

Если нет желания летать в режиме стабилизации, то отключаем акселерометр и устанавливаем максимально возможную частоту работы для процессора полётного контроллера.

Для облёта настройки PID регулятора в программе оставил по умолчанию, единственное что добавил немного экспонент на основные каналы управления.

Устанавливаем полётные режимы на ваши любимые переключатели. Естественно, надо настроить ARM (активация коптера).

В настройках Betaflight OSD располагаем необходимые нам параметры на экране в соответствии с предпочтениями.

Несколько слов скажу про удалённое управление параметрами видеопередатчика через OSD меню Betaflight. Для входа в меню необходимо дизармить коптер, установить стик газа в положение 50%, стик PITCH вверх (UP), YAW LEFT и мы попадаем в экранное меню Betaflight.

Не работает?
Если вы не видите страницу VTX в LUA скриптах, но видите страницы PID и Rate, тогда что-то не так с подключением по SmartAudio/ TrampTelemetry или с настройками порта для них. Можно проверить работает ли управление через Betaflight OSD.
Если ни одна из страниц LUA скриптов не видна (VTX, PID, Rate), тогда проблема с LUA скриптами в Таранисе. Если вы используете приемник R-XSR, то нужно обновить прошивку (202310хх), в которой исправлен баг с LUA скриптами (вот руководство по обновлению прошивок в приемниках FrSky). Также попробуйте использовать другой порт или SoftSerial.
Обзор betaflight f4
На самом деле мне очень понравился обновленный контроллер, он может дать все что нужно пилоту в плане функций, которые настраиваются в Betaflight конфигураторе.
Стильный дизайн и хорошая пайка: все элементы качественно пропаяны, так как сама плата очень прочная, 6-ти слойная, такая сможет выдержать большие нагрузки и токи. При цене в 2000 рублей, этот контроллер дает возможности контроллеров за 3-4 тысячи.
Единственным недостатком я считаю то, что регуляторы подключаются снизу контроллера и могут возникнуть проблемы с подступами к этой части контроллера, особенно это будет трудно сделать, если контроллер уже будет установлен на раму. Отмерьте провода до регуляторов, припаяйте и потом уже устанавливайте полетник на раму.
Еще один недостаток, но он просто визуальный — остатки от перемычек плат, т.е. заготовку из текстолита разрезают между собой и остаются вот такие заусенцы:
Эта реликвия все еще устанавливается на платах, в том числе и на нашей новой F4. Это индуктор. К тому же, его криво припаяли:
Хоть это и не влияет на функциональность, но это наводит на мысли, что производитель может так некачественно относиться и к другим компонентам контроллера и кто знает, в какой момент это может всплыть.
Общая информация о комплекте
Комплект AuroraRC C2 состоящий, из полетного контроллера на базе процессора F4 и комбинированного регулятора оборотов 4 в одном, предназначен для установки на рамы, рассчитанные на использование пяти дюймовых пропеллеров.
 Параметры платы полетного контроллера.Отверстия для крепления: 30.5×30.5мм
Параметры платы полетного контроллера.Отверстия для крепления: 30.5×30.5мм
Размер: 36×36 мм
Вес: 9г
Процессор: STM32F4
Датчик: MPU6000
Прошивка: betaflight_3.2.0_OMNIBUSF4SD
OSD: AT7456E
VTX: Интегрированный видео передатчик 5.8G, 48 каналов, 25/100/200/400/600mW
Антенный интерфейс: MMCX
Поддержка приемников: DSMX, IBUS, PPM, SBUS
Поддержка логов на карту памяти: Есть
BEC: 5V/3A
Питание: 2-6S (7.4V-25.6V) Параметры платы регуляторов.Отверстия для крепления: 30.5×30.5мм
Параметры платы регуляторов.Отверстия для крепления: 30.5×30.5мм
Размер: 45×47 мм
Вес: 26г (в описании указано 15.4г)
Питание: 2-6S (7.4V-25.6V)
Пиковый ток: 45А (10 секунд)
Датчики тока: Есть
Интегрированный BEC: Нет
Поддерживаемые протоколы: DSHOT1200, DSHOT600, DSHOT300, DSHOT150, Oneshot125, Multishot, PWM
На регулятор уже были припаяны провода 14AWG и разъём XT60 для подключения аккумулятора. Длина проводов 100 мм.

Ограничение
Единственная проблема с удаленным управлением видеопередатчиком через OSD — это необходимость выбора правильного канала в самом начале, иначе придется пройтись по всем каналам на приемнике, чтобы найти текущий.
Поэтому управление прямо с Тараниса будет удобнее (при помощи LUA скрипта), и вы сможете менять настройки вне зависимости от того, какой канал сейчас активен.
Питание и батарея
В этом разделе настраивается датчик тока, а также параметры аккумулятора. Все это нужно для того, чтобы квадрокоптер по OSD передавал актуальные и правильные данные об аккумуляторе, напряжении и токе во время полета.
У нас есть отдельная статья по этому блоку, рекомендуем к прочтению: Как откалибровать датчик тока и датчик напряжения в Betaflight
Подключаем приемник к полетному контроллеру
Помните, что практически все выходы в приёмнике можно программно переназначить. Это значит, что вы можете настроить их на любую функцию, поэтому есть куча способов подключения приёмника к полетному контроллеру.
Я покажу свой, можете сделать также:
- 5V к 5V
- GND к GND
- CH1 (Crossfire) к UART RX
- CH2 (Crossfire) к UART TX
На полетном контроллере можно использовать любой свободный последовательный порт (UART).
Можно подключить только CH1 и выбрать выход SBUS, но т.к. я хотел использовать протокол CRSF с телеметрией, то пришлось подключить оба провода.
Дополнительная информация: настраиваем SBUS у Crossfire (англ).
Замечу, что протокол CRSF имеет обычный, не инвертированный сигнал (как у SBUS и SmartPort), следовательно нельзя использовать выделенные для SBUS/SmartPort разъемы, т.к. там есть встроенный инвертор. Однако всё это не важно, если у вас ПК на F3 или F7, т.к. инверсия настраивается программно.
Программная эмуляция последовательного порта работает не очень быстро, поэтому её нельзя использовать с Crossfire.
В примере ниже я подключаю RX приёмника к UART6 полетника Kakute F4 AIO V2 FC.
Crossfire Micro Receiver:
Crossfire Nano Receiver:
Подключение
Нужно подключить всего один проводок!
Подключение разных видеопередатчиков одинаковое, различия только в названиях контактов. Для видеопередатчиков с протоколом Tramp Telemetry, контакт обычно называется «Telemetry«, в случае с протоколом SmartAudio — название будет «Audio» или «SmartAudio«. Иногда встречается название FC UART…
Просто подключите «Telemetry» или «SmartAudio» к контакту TX свободного последовательного порта.
Полет
И вот что в итоге получилось. Вес без аккумулятора составил 352 грамм. Аккумуляторы я использовал — Giant Power Dinogy 1300mAh 14.8V 4S 65C. Для «неспешных» полётов самое-то в соотношении цена/качество. Для облёта квадрика установил двух лопастные пропеллеры — Kingkong 5045, чтобы не сильно нагружать моторы и регулятор.

На представленном ниже DVR, можно оценить качество видеопередатчика. Передающая антенна – клевер. Антенны на приёмнике – клевер и пагода. Но OSD выведены параметры: общий ток; напряжение аккумулятора; мощность; температура платы ПК; положение стика газа.
Я был приятно удивлён практически полному отсутствию помех от регулятора при резкой работе стиком газа. Несколько слов про температуру полётного контроллера. При работе видеопередатчика плата очень сильно нагревается, до 70℃. В полете она обдувается потоком воздуха от пропеллеров и её температура выше 35℃ не поднималась. Запись DVR велась на очки Skyzone SKY02S V .
Квадрик полетел. Не плохо на стоковых настройках. Не судите строго FPV пилот из меня пока так себе, тренируюсь. Ниже приведу видео полета с камеры – xiaomi yi. Летать пришлось в сильный порывистый ветер до 12 м/c, квадрик немного сносило, но в целом результатом я доволен.
Товар предоставлен для написания обзора магазином. Обзор опубликован в соответствии с п.18 Правил сайта.
Полётный контроллер
Сразу хочу предупредить, так как на полётный контроллер интегрирован видеопередатчик, подключать его следует только с установленным пигтейлом и подключенной к разъёму SMA антенне. В противном случае возможен выход передатчика из строя. Данный ПК (ПК — полётный контроллер) по сути, один из многочисленных клонов OMNIBUS4SD, на который установили видеопередатчик.

На полётном контроллере применена вполне стандартная для таких изделий связка. Процессор STM32F4 и сенсор MPU-6000.

На плате присутствуют контактные площадки для подключения пищалки и габаритной светодиодной подсветки.

Рядом с антенным разъёмом расположены две кнопки управления видеопередатчиком. Кнопка FR переключает частотную сетку и канал, кнопка POW – мощность.

Для индикации установленной частотной сетки, канала и мощности видеопередатчика применены SMD светодиоды, расположенные в трёх группах, POW, CH, FR.

Короткое нажатие кнопки FR переключает каналы, длительное нажатие (2 секунды) переключает частотную сетку. Однократное нажатие на кнопку POW регулирует мощность –25mW, 100mW, 200mW, 400mW, 600mW.

Для подключения к ПК и настройкам в программе betaflight на полётном контроллере установлен порт – micro usb.

Контроллер оборудован слотом для карточек памяти формата micro sd. При активации логов в прошивке betaflight, становиться доступным запись полётных параметров на карту памяти. Но обычно данной опцией никто не пользуется.

ESC – порт для подключения полётного контроллера к регулятору. САМ – порт для подключения курсовой камеры.

PPS/S – для подключения приёмников по шине SBUS. DSM/T – порт для приёмников spectrum.

Контактные площадки портов периферии. Эти порты могут управлять дополнительным оборудованием на коптере, например, камерой – Runcam Split.

В качестве чипа OSD на данном полётном контроллере применена микросхема AT7456E.

Распиновка полётного контроллера:

Качество пайки и изготовления контроллера на приемлемом уровне, хотя в некоторых местах я наблюдал остатки неотмытого флюса.

Привязываем приёмник crossfire к передатчику
Привязка приёмников Crossfire делается очень просто (в большинстве случаев), активировать режим привязки можно при помощи LUA скрипта. Такие скрипты поставляются с OpenTX начиная с версии 2.2., так что ничего не придется качать. 🙂
Пошаговая инструкция для привязки приемников Crossfire:
- Включаем приёмник, должен мигать зеленый светодиод, это значит, что он ждет начала процедуры привязки (если горит красный, тогда нажмите кнопку bind на приёмнике)
- Включаем передатчик и запускаем Crossfire LUA скрипт:
- Долгое нажатие на Menu, входим в Radio Setup (настройки передатчика). Нажимаем Page чтобы добраться до страницы «SD Card«
- Выбираем папку CROSSFIRE и долго жмем enter на файле crossfire.lua, в меню выбираем «execute» (выполнить)
- На следующем экране выбираем XF Micro TX
- Далее выбираем Binding (как показано на картинке)
- Появится сообщение «Binding…», сам процесс привязки займет несколько секунд
- Если в приемнике слишком старая прошивка, тогда вам предложат её обновить, это займет несколько минут. После перепрошивки приемник будет быстро мигать зеленым (загрузка), затем зеленые светодиоды на приемнике и передатчике перестанут мигать и будут гореть постоянно.
- После привязки T16 автоматически переходит в обычный режим, а светодиод на приемнике перестает мигать и постоянно горит зеленым.
Выходим из меню, нажав Exit. Переходим к настройке приёмника.
Регулятор оборотов 35a 4in1
Плата регулятора интегрирует в себя четыре 32-х битных регулятора с поддержкой DSHOT1200. К плате регуляторов можно подключать аккумуляторные батареи 3-6S. Пиковый кратковременный ток нагрузки – 45А (10 секунд) для каждого из четырёх регуляторов. На плате нет никаких надписей, которые могли бы пролить свет на её происхождение. На странице товара она значится как – Roptor BLHeli_32 35A ESC.

Изначально место пайки питающих проводов было залито чёрным компаундом. После его снятия под ним оказалась вполне приличная пайка. Если нет необходимости укорачивать провода, можно оставить как есть.

Мозгом регуляторов являются четыре 32-х битных процессора
– красный контур. В качестве драйверов регуляторов применены четыре
– синий контур. Зелёным контуром отмечены датчики тока, четыре датчика на каждый из регуляторов и один общий по шине питания.

Силовые мосфеты – M3100M. К сожалению, никакой информации, про них я не нашёл. Подозреваю, что они рассчитаны на 30В и пиковые токи около 100А.

Распиновка регулятора:

Качество сборки и пайки регулятора неплохое. Видимых огрехов и дефектов я не обнаружил.

Режимы
Этот раздел сделан для настройки разных тумблеров и крутилок на пульте управления.
Мы будем настраивать 2 стика:
- Арминг — поставнока и снятие с охраны квадрокоптера;
- Включение режима стабилизации и АКРО режим (ручной режим управления).
Чтобы назначить тумблеру действие, делаем следующее:
- Наводим мышь на ARM и жмем «Добавить диапазон»;
- Выбираем канал AUX1, например, либо можете оставить «АВТО» и щелкнуть любым удобным тумблером, автоматически будет выбран канал, который привязан к этому тумблеру (каждому тумблеру в пульте нужно привязать свой канал, как это делать, смотрите в видео (на английском, но все понятно):
После того, как выбрали AUX, пощелкайте тумблером. На ваши действия, по полоске будет «бегать» желтая точка, она соответствует положению тумблера. Если переместить желтые полоски на область , где будет находиться желтая точка, то квадрокоптер начнет реагировать на это положением, в нашем случае это арминг или снятие с охраны. - Нажмите «Сохранить».
Теперь, когда вы переведете этот тумблер, моторы дрона начнут вращаться с маленькой скоростью, дрон будет снят с охраны. Это называется «Заармить».
Так как на странице Конфигурация был включен ползунок на AIRMODE, квадрокоптер сейчас находится в ручном режиме без стабилизации, то есть, в режиме АКРО.
Режим ANGLE это режим стабилизации. Его назначаем на другой тумблер. Обычно эти 2 режима назначают на один тумблер у которого 3 позиции, то есть, на вторую позицию настраивают ARM и АКРО, а на 3 позицию ANGLE режим, чтобы они не накладывались друг на друга и в случае чего, вы просто переведете в верхнее положение тумблер, чтобы включилась стабилизация.
Рекомендации: проверка безопасности
Перед установкой пропеллеров, рекомендую выполнить ряд проверок, чтобы избежать проблем перед полетом.
Проверить направление двигателей
Перейдите во вкладку «Моторы» и включите режим тестирования по кнопке «Я понимаю всю опасность»:
Теперь запустите моторы (надеюсь вы сняли пропеллеры?) и проверьте, в правильную ли сторону крутятся двигатели в соответствии с этой схемой:
Проверить загрузку процессора
Пока квадрокоптер подключен к Betaflight, посмотрите на нижний сайд-бар:
Если загрузка будет 95% и выше, то у вас будут проблемы во время полета, так как процессор перегружен и не будет успевать вовремя обрабатывать данные. Чтобы решить эту проблему, отключите некоторые функции или отключите разгон, если у вас контроллер F4. Но на современных полетных контроллерах такая проблема — большая редкость.
Проверить гироскоп
Перейдите во вкладку Система и и проверьте настройки гироскопа:
Возьмите квадрокоптер в руки и наклоняйте его во все стороны, ваши действия точь-в-точь должна повторять 3D модель на экране. Стрелка указывает на нос дрона. Если это не так, вернитесь в начало статьи, «Конфигурация», блок 2.Кроме этого, после настроек и тем более прошивки, нужно калибровать акселерометр.
Сделайте бекап настроек
Сборка квадрокоптера
Для сборки квадрика я использовал раму – Realacc XS220. Нижняя часть рамы выполнена из карбона 4,3 мм, все остальные карбоновые элементы толщиной 2,7 мм. Моторы – DYS SE2205 PRO 2300KV. Камера – Foxeer HS1177 V2. Приёмник – Frsky XM Micro D16 для аппаратуры TARANIS. Защита моторов (можно не ставить) – KINGKONG Universal Motor Cover Protection.

Процесс сборки подобных коптеров абсолютно стандартный. Единственное на чём хочу акцентировать внимание это защита регулятора оборотов от влаги. Это особенно актуально, когда вы летаете там, где есть густая трава и утром на ней скапливается большое количество росы. Падение в такую траву может привести к короткому замыканию и как следствие выгоранию регулятора оборотов.

Для защиты электронных компонентов от влаги я использую 4–5 слоёв лака ПЛАСТИК 71, после этого покрываю регуляторы двухкомпонентным силиконовым герметиком К-68.

До начала процесса полимеризации герметик очень текучий, его можно наносить кисточкой. Промазываем герметиком плату регулятора с обеих сторон.

Припаял комплектный конденсатор на 2200µF, и «одел» его в термоусадку.

Чтобы не плодить лишних проводов, пищалку припаял непосредственно к контактам на полётном контроллере.

К комплектным шлейфам подключил камеру и передатчик.

Теперь можно подключать полётный контроллер к регулятору оборотов. Ещё раз все проверяем на работоспособность и заканчиваем сборку рамы.

Результат двух часов работы (основное время ушло на сушку лака):

Из за установленного электролита, доступ к кнопкам настройки видеопередатчика затруднён. Эту проблему вполне можно решить, используя обычную спичку.

Ставим радиомодуль crossfire в taranis
Радиомодуль просто вставляется в отсек позади пульта. Ставьте его аккуратно, не повредите контакты.
Crossfire полностью совместим с Taranis X9D и Jumper T16. Работает с Taranis QX7 и Horus X10S, но есть небольшие недостатки, например, нельзя использовать макс. скорость передачи, что вызывает сообщение о потере телеметрии.
Устанавливаем антенну приемника
Если вы уже использовали другие системы радиоуправления, то вы удивитесь необычно крупной антенне и столкнетесь с проблемой — как её крепить? Вот статья (англ.) с описанием способов крепления антенн Crossfire.
Там несколько примеров с разными антенными: включая стоковый диполь и не убиваемую «Immortal T».
Чтобы добиться максимально возможного радиуса уверенного приема постарайтесь располагать антенну так, чтобы рама её не затеняла. Не сгибайте антенну и старайтесь правильно её ориентировать.
Антенну можно поставить практически в любое место на коптере, главное, чтобы её не повредили винты, все очень сильно зависит от рамы. Не забудьте поискать 3Д-печатный крепеж на Thingiverse.
Выводы
Несмотря на эти мелкие недочеты, я считаю Betaflight F4 лучшим контроллером полета на сегодняшний день. Можно смело сказать разработчикам: «Браво!». Работу они провели достойную.
Купить Betaflight F4: ЗДЕСЬ