
- На что обратить внимание?
- Digitrode
- Новый игрок на рынке
- Безопасность
- Выбираем тип и размер квадрокоптера
- Другие проекты контроллеров для квадрокоптеров
- Немного теории
- Несколько советов новичкам
- Относительно дешевый quadcopter на arduino с управлением от телефона, планшета, пк
- Подключение к контроллеру
- Программное обеспечение
- Сборка
- Создаем квадрокоптер на базе arduino
- Фишки новой модели
- Шаг №1. делаем корпус
- Шаг №3. скетч для arduino
- Что нужно для сборки квадрокоптера
- Чертежи и схемы квадрокоптеров
- Как сделать самодельный квадрокоптер из бумаги
- Сборка корпуса из бумаги
- Установка электронной начинки
- Как сделать мини-дрон своими руками в домашних условиях
- Сборка силовой рамы дрона
- Установка электронной части и моторов
- Проверка работоспособности
- Как сделать квадрокоптер с камерой своими руками
- Сборка рамы
- Установка моторов
- Сборка электроники
- Установка камеры
- Установка регуляторов оборотов и подключение проводов
- Как сделать гоночный квадрокоптер своими руками
- Сборка моторной части
- Подсоединение проводов
- Как сделать квадрокоптер для человека своими руками
- Рама
- Установка моторов и регуляторов оборотов
- ЁСборка системы управления
- Собираем самодельный квадрокоптер
- HobbyKing KK
- MultiWii Lite V1
- MultiWii 328P
- Регуляторы оборотов для квадрокоптеров и мультироторных летательных аппаратов
- Turnigy Multistar 2216-800Kv
На что обратить внимание?
Пытаясь собрать дрон своими руками на Arduino возникает мысль полностью написать программное обеспечение. От этой мысли нужно избавиться, во всяком случае, на первых этапах.
Например, для управления полетным контроллером сейчас достаточно готовых решений. Если же вы сразу решите писать что-то свое, то высок риск повреждения квадрокоптера. Причина в том, что математика полета составляет минимальную часть всего кода программы, а для управления квадрокоптером без барометра и системы GPS требуется хорошая практика (особенно она понадобится при некорректной реакции дрона Arduino на управляющие команды, что происходит почти всегда).
https://www.youtube.com/watch?v=s873edJaZpg
Значительно удобней сначала попрактиковаться и разобраться в существующих программах, что позволит четко понять принципы работы.
Если вы решите писать программу для контроллера своими руками, то готовьтесь к большим временным затратам, которые неразумны при отсутствии соответствующего академического интереса. Во всяком случае, имеющиеся программы и решения для квадрокоптеров на базе Arduino вполне могут выполнять все стандартные действия (снимать видео, фотографировать, летать свободно и по заданию).
Digitrode
Управлять квадрокоптером – это веселое и интересное занятие. Интереснее может быть только создание своей системы управления такой игрушкой на базе какой-нибудь популярной платформы, например, Arduino. Чем и занялся энтузиаст под ником Dzl. Первым делом он разобрал пульт дистанционного управления для того, чтобы посмотреть, какая радиосистема в нем используется.
Внутри, как и ожидалось, была пара дешевых печатных плат с небольшим количеством компонентов на них.
Радиосвязь обеспечивалась небольшим дискретным радиомодулем. После дополнительного анализа и поиска в интерненте выяснилось, что модуль основан на микросхеме передатчика BK2421, работающего в диапазоне 2. 4 ГГц. Сегодня, в принципе, большинство дешевых игрушек с радиоуправлением основаны на этом модуле.
Благодаря осциллографу и документации на микросхему было довольно просто найти выводы, по которым осуществлялась связь по интерфейсу SPI между модулем и остальной частью пульта.
Благодаря «прослушке» с помощью Arduino UNO стал понятен порядок инициализации и режим связи. имеется порядок инициализации.
Не вдаваясь в подробности низкоуровневой коммуникации, при включении пульта и квадрокоптера происходит следующее:
Пульт передает свой уникальный сетевой адрес или ID
Квадрокоптер принимает эту передачу, подтверждает ее и начинает прослушивать канал с данными от этого ID
После подтверждения пульт начинает передавать пакеты данных каждые 20 мс
Можно управлять одновременно несколькими квадрокоптерами, назначив им разные адреса. Передача ID проходит по одному фиксированному каналу, и данные передаются по одному из 12 случайных каналов. Квадрокоптеры автоматически сканируют радиоканалы, пока не найдут данные.
Данные передаются в пакете, состоящем из 8 байт, в следующем формате:
Байт 0 = throttle (газ) 0-255 Байт 1 =Yaw (рыскание) 0-255 Байт 2 =Yaw_trim (подстройка Yaw) 0-128 Байт 3 = Pitch (тангаж) 0-255 Байт 4 = Roll (крен) 0-255 Байт 5 = Pitch_trim (подстройка Pitch) 0-128 Байт 6 = Roll_trim (подстройка Roll) 0-128 Байт 7 = Fly/run 0=fly, 16=run
Затем была создана базовая станция, которая должна связываться квадрокоптерами. В качестве модулей использовались RFM-70, содержащие ту же микросхему BK2421. Следует отметить, что выводы BK2421 толерантны к 5 В, поэтому дополнительные резисторы для 3. 3 В можно не ставить.
https://youtube.com/watch?v=YwSMbRkMw9c%3Ffeature%3Doembed
Для подключения одного и более квадрокоптеров к Arduino была написана специальная библиотека. Эта библиотека должна работать с любыми платами Arduino на базе чипов ATMEGA88 — ATMEGA328P. И в конце видео работы:
Новый игрок на рынке
Tello – это совместное произведение DJI и Intel с молодым стартапом Ryze Technology из того же Китая. Основана компания была в 2023 году. Пока что предприятие нацелено на изготовление дронов, оснащённых камерой, а также с арсеналом всевозможных «умных» функций и возможности обучения. Компания ставит целью повысить интерес молодёжи к современной технике.
В разработке дрона Tello молодому стартапу помогли именитые «гиганты»: от DJI был взят контроллер полёта, а от Intel – установлен мощный процессор. Вся эта мощь умещается в небольшом корпусе, который можно брать с собой куда угодно. Tello умеет «учиться»: владелец получит возможность программировать дрон, причём по заверениям разработчиков это будет настолько легко, что с программированием справятся не только подростки, но даже дети!
Нельзя сказать, что Tello – это продукт от DJI, хотя дрон и похож визуально на Spark. Всё-таки DJI и Intel – скорее партнёры, участвовавшие в разработке квадрокоптера. Кроме того, DJI будут предлагать Tello для покупки в своём онлайн-магазине.
Безопасность
Все новички, думая о безопасности, вспоминают AR. Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета.
Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах.
Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение.
Выбираем тип и размер квадрокоптера
При сборке квадрокоптера выберите подходящий размер аппарата. Бывают такие:
- Мини квадрокоптер – маленькая модель, с небольшим радиусом действия. Помещается в ладонь, подходит для полетов в помещениях.
- Трикоптер — модель беспилотника,у которого только три пропеллера. Это делает его легче и маневреннее, однако теряется крутящий момент. Вместо этого используется механизм наклона заднего ротора. Сложно сделать своими руками.
- Обычный квадрокоптер – простой и недорогой беспилотник. Диагональный размер в среднем 35 см (без пропеллеров). Состоит из минимального набота деталей с целью уменьшения веса устройства. Характеризуется большой скоростью передвижения и маневренностью.
- Складной квадрокоптер берут в поездки, путешествия, когда важен размер и вес устройства. Складная рама облегчает транспортировку устройства. В самостоятельном изготовлении сложен.
- Большой квадрокоптер – самый дорогой и тяжелый тип беспилотника. Способен летать на дальние расстояния, оборудован емким аккумулятором, несет сложное фото- и видеооборудование. Делайте самостоятельно только если уже владеете навыками изготовления подобных устройств.
Основные проблемы с маленьким квадрокоптером — его стоимость и вес. Можете поискать моторы побольше и помощнее, но это особо не улучшит его характеристики. Что вам действительно поможет, (если вы готовы отдать больше денег) — это безщеточные (вентильные) моторы.
Для уменьшения веса конструкции лучше всего использовать именно Arduino Uno, так как к этой модели контроллера можно снять «прошитый» чип микропроцессора и установить его непосредственно на вашу ProtoBoard. В результате вы выиграете около 30 грамм веса, что немало при таких масштабах.
Программа для Arduino, которая написана и представлена в предыдущем разделе, может быть легко расширена и обогащена дополнительным функционалом. Самое главное, что на этом этапе квадрокоптер уже может автоматически стабилизировать полет. Если вы хотите настроить дистанционное управление, можете посмотреть в сторону трансмиттеров/ресиверов или bluetooth модулей. В общем, основа у вас теперь есть, а пространства для дальнейшей модернизации — еще больше.
Другие проекты контроллеров для квадрокоптеров
Ниже приведены несколько других проектов контроллеров для квадрокоптеров на базе Arduino.
Плата контроллера может использоваться для три- и квадрокоптера с возможностью дополнительной установки камеры и стабилизацией тангажа.
Для питания сенсоров используется 3. 3 В постоянный ток от Arduino Nano.
Контроллер, выполненный в круглом форм-факторе. Контроллер можно использовать на три- и квадрокоптерах.
Еще один круглый контроллер. Может использоваться для три- и квадрокоптеров. Можно подключить видеокамеру. Предусмотрена стабилизация тангажа и крен.
Предусмотрена проверка питания. Если питание отсутствует, подается сигнал на динамик. Можно запитать плату от отдельного BEC. На контроллере установлен светодиод для отслеживания состояния и питания.
Есть интересные серийные контроллеры для квадрокоптера на Arduino. Например, в пердставленом ниже тоже используется круглый форм-фактор плат. Этот контроллер можно использовать для три- квадро-, гексакоптера. Поддерживаются все фичи MultiWii версии 1. Кроме того, на плате есть встроенный регулятор 3. 3 вольт.
Немного теории
https://youtube.com/watch?v=O8UB5vUIQkw%3Ffeature%3Doembed
Вне зависимости от формы и технических возможностей квадрокоптера у него обязательно четыре винта, которые попарно вращаются в разные стороны. Это необходимо для обеспечения стабильности положения в воздухе, так как если все винты будут вращаться в одном направлении, то дрон будет крутиться вокруг своей вертикальной оси.
Перемещение дрона на Arduino и любом другом контролере осуществляется за счет изменения трех параметров:
Первый параметр определяет угол наклона вверх или вниз передней части квадрокоптера, позволяя выполнить снижение или подъем дрона. Крен определяет угол наклона, когда правая часть оказывает ниже или выше левой. Рыскание определяет угол поворота квадрокоптера Arduino вокруг вертикальной оси, проходящей через его центр тяжести, обеспечивая дрону поворот в горизонтальной плоскости на нужный угол.
Arduino – небольшая по габаритам плата (сравнима со спичечным коробком), имеющая собственный микропроцессор и память. На нем есть большое количество контактов для подключения компонентов, а возможность загрузки программы позволяет управлять ими по заданному определенному алгоритму.
В итоге плата Arduino дает широкие возможности для создания различных гаджетов, среди которых дрон лишь один из примеров.
Одновременно плата Arduino очень проста в освоении, поэтому работать с ней под силу даже людям, имеющим очень смутные познания в схемотехнике и программировании. Наличие же большого числа учебников, публикаций, видеоуроков позволит освоить простейшие действия с платой всего за пару часов.
Непосредственно программирование на Arduino идет с помощью языка С , имеющим большое распространение. Одновременно большое количество типовых программ позволит быстро его освоить до уровня, которого достаточно для управления дроном. Одновременно широкий выбор библиотек сократит время запуска первого дрона, предупредив появление детских ошибок.
Не потребует Arduino и наличия при сборке паяльника, так как вполне можно обойтись макетной доской и набором перемычек, что одновременно упрощает работу, позволяет быстро исправить какие-то недочеты и ошибки при сборке.
Несколько советов новичкам
Решая заняться созданием квадрокоптера на Arduino, обратите внимание на следующие советы:
- Не усложняйте первую конструкцию, устанавливая экшен-камеру. Вашей задачей остается создание дрона, который сможет взлететь и уверенно держаться в воздухе, а не упасть на землю, сломавшись при первом полете. Если же последнее произойдет, то легко можно разбить экшен-камеру, а это большие расходы.
- Не гонитесь за большими масштабами, так как на первый раз достаточно создать небольшой рабочий Arduino дрон, над конструкцией которого можно будет дальше работать, совершенствуя и усложняя.
- Сократите до минимума количество дополнительных элементов и соединений, так как большое число датчиков и всевозможных контролеров не всегда повышает надежность дрона в полете. Значительно лучше создать базовую конструкцию и постепенно ее усложнять, добавляя новые функции и возможности. Это будет значительно разумней и позволит в будущем проектировать «специализированные» дроны.
- Если вы хотите изготовить квадрокоптер Arduino с камерой, то вам потребуется основание достаточно больших размеров, что снижает устойчивость всей конструкции.
В завершение обратим внимание, что программирование и создание квадрокоптера на базе Arduino – увлекательное, но достаточно сложное дело для новичков, поэтому не опускайте руки, если у вас не получается. Сделать на Arduino дрон вполне реально каждому и поможет в этом масса дополнительной информации и видео, которое вы легко найдете в интернете.
Относительно дешевый quadcopter на arduino с управлением от телефона, планшета, пк
Прочитав эту статью, вы узнаете, как построить не дорогой квадрокоптер, управляемый с андроид устройства, дистанционного пульта или с компьютера. В этом проекте много шагов, которые вы можете пропустить. Например, вы можете пропустить строительство квадрокоптера и купить готовый в интернете, но вы все равно будете использовать Arduino, чтобы управлять им с вашего планшета или ноутбука. Однако если вы пойдете этим путем, то вы лишитесь удовольствия от комбинирования китайских бамбуковых палочек и дешевой пластмассы от производителей электронных игрушек. Это дешевый проект, самой затратной частью которого, является ArduinoDUE, хотя, можно использовать и что-нибудь подешевле.
Что вам понадобится для того, чтобы собрать и запустить в воздух свой квадрокоптер:
Processing — открытый язык программирования, основанный на Java. Представляет собой лёгкий и быстрый инструментарий для людей, которые хотят программировать изображения, анимацию и интерфейсы. Используется студентами, художниками, дизайнерами, исследователями и любителями, для изучения, прототипирования и производства. Он создан для изучения основ компьютерного программирования в визуальном контексте и служит альбомным программным обеспечением (имеется в виду то, что каждый *. pde файл визуальной оболочки Processing’а представляет собой отдельное изображение или анимацию, и т. ) и профессиональным производственным инструментом.
Что надо для изготовления рамы
Рама квадрокоптер делается из бамбуковых шашлычных палочек
Крепления двигателей к раме делаются из палочек для коктейля.
Изолента- используется для крепления платы приемника, электродвигателей к раме. Нитки нужны для скрепления деталей перед склейкой. Цианакриловый клей. Резинка для крепления аккумулятора к раме.
Список электроники для квадрокоптера.
Все эти детали могут быть повреждены во время пробных запусков или во время полетов, поэтому заказывайте с запасом. Ссылки даны для примера. Есть много поставщиков. Лопасти для вертолета Двигатели. Я не нашел двигатели с размерами 4х7 мм на Алиэкспресс нашел вот такие. Моторы должны быть без щеточные.
Плата приемника эта плата содержит все компоненты- гироскоп, акселометр, ESC (система курсовой устойчивости), CPU который все эти компоненты объединяет. Литий полимерный аккумулятор:1 x 240mah 1S ‘LiPo. Можно использовать разные аккумуляторы с меньшей или большей емкости. Если вы решите построить октакоптер, то вам понадобиться более емкая батарея.
Список аппаратного контроля квадрокоптера.
Это те части вашего будущего вертолета, которые позволят ему принимать ваши команды. Приемопередатчик Учтите что в комплекте должны быть два модуля. И это не тоже самое что NRF24L01, что бы ни утверждал продаван.
Макетная плата-на ней вы будете монтировать радио модуль и подключать его к Arduino. Резистор 22кОм- значение его не особо критично. Провода для соединения радио модуля. OTG переходник для вашего андроид устройства.
OTG Hubsan-пульт дистанционного управления-это не обязательно, но удобно.
Создание каркаса.
Каркас изготавливается из бамбуковых палочек, скрепленных крест на крест с трубочками от коктейлей. Все это склеивается вместе супер клеем. 1: Распечатайте шаблон SVG в прикрепленном файле. Он сложнее, чем должен быть, но также используется для строительства октокоптера. Шаблон нужен, чтобы сделать правильный квадрат.
Отрежьте нитку по длине вашего предплечья.
3 Возьмите две палочки для коктейлей и держите их так, чтобы шашлычная палочка делила их пополам и они находились друг на против друга.
4 Начните оборачивать нитку сначала по одной диагонали , потом по другой, наматывайте равномерно ,пока нитка не кончится. Не беспокойтесь о том, что палочки смещаются, вы их позже приклеите клеем. Нитку возьмите длиной с ваше предплечье. Не волнуйтесь по поводу того, что палочки слишком длинные, позже они будут использоваться как крепления мотора и ноги квадрокоптера.
Возьмите еще две палочки для канапе и закрепите их как в предыдущем шаге , только на расстоянии 4 пальцев от ранее прикрепленных. Точное расстояние не важно, вы исправите его далее.
Положите шаблон на ровную поверхность, лучше использовать стекло.
Разместите ваши связанные вместе палочки, как показано на фото.
На данном этапе важно все сделать как можно точно. Квадрокоптеры не очень чувствительны к распределению веса, но если ваши моторы не будут направлены вертикально, вертолет будет не очень хорошо летать, так что проверьте все два раза. Чтобы крепления моторов были строго вертикальными, а все диагонали одинаковыми.
8 Пропитайте все ваши нити, связывающие палочки, супер клеем. Надо пропитать нити насквозь, стремитесь не сдвигать при этом ваш каркас. Подождите 2 минуты и переверните ваш шаблон, чтобы пропитать нитки клеем с обратной стороны. Еще через две минуты первая квадратный кронштейн будет готов готова.
Повторите все тоже самое для второго кронштейна.
Далее надо скрепить вместе два кронштейна, как было уже описано. Еще раз убедитесь, что все крепления моторов выставлены вертикально и кронштейны скрепляются строго по середине.
Обрежьте палочки примерно на длину 2 см с обеих сторон.
Отрежьте 4 палочки по 1. 5 см , склейте их вместе квадратом, особо прочная склейка не нужна, это будет кронштейн для платы и батареи питания.
Следующий этап состоит из пайки ваших 4 моторов к плате 4Х приемника. Первое, что надо – это припаять провода питания на нижнюю часть платы. Далее мы будем ссылаться на эту ориентацию (плата лежит на “спине”)
Как подключать моторы.
Сборка радиоуправления на arduino.
Этот пункт проекта расскажет как управлять вертолетом с помощью Андроид устройства,через последовательный порт Arduino.
Вам нужны 6 контактов на плате А7105. Слева GND. Справа-SDIO, SCK, SCS, GND, VCC.
Припаяйте жесткий одножильный провод, длиной 2 см, к каждому указанному выводу. Вставьте А7105 в макетную плату, так как показано на фото. Соедините выводы GND на плате arduino и два на А7105. Соедините вывод 3. 3V на Arduino c выводом VCC на плате А7105. На разъеме SPI Arduino, соедините вывод MOSI с одним из выводов резистора , другой конец резистора соедините с пином SIDO на А7501.
По этой ссылке можно посмотреть где находится вывод MOSI Вывод SCK Arduino c выводом SCK А7105 , SCS с платы А7105 на пин 10 Arduino. Синий резистор на фото не является частью проекта.
Нижеследующий скетч использует хакнутую версию PhracturedBlue’s hubsan X4 и A7105 оригинал кода можно посмотреть здесь.
Программное обеспечение для Андроид
Это программноеобеспечениедает вам простой контролер полета на базе андроид устройства. Для управления используется акселерометр и сенсорный экран вашего устройства. Планшет или телефон будет обмениваться данными с Arduino через порт USB.
Программное обеспечение для ПК В архиве программа, которая управляет коптером через последовательный порт. Управляется коптер с помощью курсорных кнопок, и кнопок “A”/”Z”- дроссель. Автор сделал попытку заставить следовать коптер за объектом определенного цвета, но это пока не работает. Обещал выкладывать обновления.
Подключение к контроллеру
Для того, чтобы управлять коптером, нам необходимо получить контроль над моторами, подключив их к Arduino. Контроллер дает на выходе лишь небольшое напряжение и силу тока, поэтому подключение двигателей напрямую лишено смысла. Вместо этого можно поставить несколько транзисторов, позволяющих увеличить напряжение.
Для составления схемы нам необходимы:
- Arduino
- Двигатели
- Транзисторы
Все это собирается на монтажной плате и соединяется коннекторами.
На первом этапе следует подсоединить 4 ШИМ выхода (обозначены ~) к транзистору. Затем подсоедините коннекторы к движкам, подключенным к питанию. В нашем случае мы используем аккумулятор на 5В, но подойдет и аккумулятор на 3-5В.
Транзисторы должны быть заземлены, а земля на плате Arduino должна быть подключена к земле аккумулятора. Двигатели должны вращаться в правильном направлении, то есть работать на подъем коптера, а не на его крен.
Переключив контакт двигателя с напряжения 5В на транзистор, вы увидите, что ротор изменит направление вращения. Единожды совершив настройку, больше возвращаться к изменению направления вращения ротора не придется. Теперь нас интересует скорость.
https://youtube.com/watch?v=3S1Sq64dJuc%3Ffeature%3Doembed
Запустив и проверив акселерометр, мы устанавливаем нашу схему на ProtoBoard. За ее неимением, можно использовать и обычную монтажную плату, предварительно напаяв на ней рельсы для контроллера.
Перед тем, как припаивать акселерометр к плате, необходимо выполнить его калибровку на горизонтальной поверхности. Это поможет добиться более точной работы сенсора в будущем.
Программное обеспечение
ПИД-регулятор (назначение и настройка)
Proportional Integral Derivate (PID) или Пропорционально-интегрально-дифференцирующий регулятор (ПИД) — часть программного обеспечения полётного контроллера, которое считывает данные с сенсоров и вычисляет, как быстро должны вращаться моторы, чтобы сохранить желаемую скорость перемещения БЛА.
Разработчики готовых к полёту БЛА как правило оптимально настраивают параметры ПИД-регулятора, поэтому большинство RTF беспилотников отлично пилотируются прямо из коробки. Чего не скажешь про кастомные сборки БЛА, где актуально использование универсального полётного контроллера подходящего для любой мультироторной сборки, с возможностью регулировки значений PID до тех пор, пока они не будут соответствовать требуемым характеристикам полёта конечного пользователя.

Сборка
Прежде всего, подготавливаем и соединяем лучи и раму. Если нет возможности напечатать раму на 3D принтере, то вместо нее используйте обычную фанеру. В месте соединения деталей рамы установите силовую плату. Закрепить ее следует внизу в центральной части.
Далее установите полетный контроллер сверху. Очень важно, чтобы он был размещен точно по центру, поэтому лучше всего замерить место, где он будет находиться. Крепить эту деталь стоит саморезами нужного размера. Затем закрепите приемник и передатчик, для этого подойдет суперклей. Также подготовьте площадки на концах лучей.
Следующим шагом идет установка батареи. Используйте два аккумулятора Zippy Compact по 3700 мА·ч. Крепить их необходимо по диагонали сразу к двум лучам. Используйте для этого широкий пластиковый ремешок и скотч. Крестовина в центральной части также подойдет для установки аккумуляторов. Между крестовиной и контрольной панелью имеется пространство, туда просуньте ремешок для крепления аккумуляторов.
В завершении собираем и устанавливаем винты на концах лучей на специальные площадки. Остается только подключить провода и можно приступить к первым полетам. Лучше всего для начала засечь время полета, чтобы успеть сделать мягкую посадку. Это особенно важно, если на сделанный своими руками беспилотник не было прикреплено шасси.
Создаем квадрокоптер на базе arduino
Не обязательно покупать беспилотник в магазине — теперь вы можете сделать квадрокоптер на базе arduino самостоятельно. Дрон будет иметь мощное автономное питание и функционировать на стабилизационный системе, основой которой будет база Arduino. Если сделать летательный аппарат своими руками, можно сэкономить приличную сумму. Покупной коптер стоит минимум 80 долларов. Если вы создадите его самостоятельно, это обойдется примерно в 60 условных единиц.

Самодельный квадрокоптер — предмет отдельного разговора. Всегда были, есть и будут пользователи, которым мало просто летать. Им необходимо почувствовать себя великими конструкторами и быть уверенными, что дрон, сделанный собственноручно, будет летать так, как хочется именно им.
Летающую модель с 4 ножками можно сотворить своими руками. Процесс не покажется вам сложным, а наоборот, доставит удовольствие, но только при условии изучения инструкции и пошагового ее соблюдения. Прежде всего, перед процессом создания дрона, стоит определиться с элементами, которые будут использованы в работе. В качестве контролера, как и предполагалось, будем использовать платформу Arduino — это недорогая, но качественная база, которая обеспечит устройству бесперебойную работу.
Для создания беспилотника важно правильно подобрать двигатели. Бесщеточные достаточно мощные, но их стоимость составляет минимум 20 долларов, это означает, что устройство обойдется около 80 долларов. В данном случае стоит отдать предпочтение щеточному варианту — намного дешевле, и не требуют установки дополнительных контроллеров.
Так же необходимо позаботиться о приобретении качественного мотора, а затем заняться его стабилизацией. Здесь не обойтись без акселерометра и гироскопа. Так определим угол наклона и ускорение. Данные сенсоры — для создания мощной модели. Чтобы сделать квадрокоптер своими руками с управлением Arduino, вам понадобятся:
- аккумуляторы на 3,7 В литиевого типа;
- провода;
- транзистор не слабее ULN2003A Darlington Transistor;
- моторы Coreless Motors;
- микроконтроллер 0820 Coreless Motors;
- гироскоп;
- акселерометр;
- инструменты для спаивания;
- 3D принтер.
Первое, что следует сделать – это создать раму для будущего квадрокоптера. Каркас получится легким и прочным, если воспользоваться 3D принтером. Затем следует настроить акселерометр и гироскоп. Не нужно подключать к 5 В — это может привести к тому, что плата испортится. Лучше отдать предпочтение 3. 3 В. Необходимо учесть, что в большинстве плат есть специальный регулятор напряжения.

После подключения акселерометра можно начать сборку электросхемы. Чтобы сделать все правильно, стоит просмотреть подробное видео, где доступно разъясняют способы сборки. Теперь у вас есть свой квадрокоптер, который вы сделали под нашим четким руководством.
Как оказалось – это вполне реальная задача. Процесс не доставит вам забот, зато можно сэкономить большую сумму. Если возникли сомнения по поводу запуска вашего устройства, инструкцию о том как это сделать читайте здесь. При правильном обращении квадрокоптер на базе arduino прослужит долго.
Фишки новой модели
Квадрокоптер Tello относится скорее к дронам для развлечения (фандронам), чем к категории дронов с камерой. Этот малыш умеет совершать забавные трюки и сальто в воздухе, что доставит массу удовольствия пилотам младшего возраста. Tello можно без опаски запускать с ладони и сажать на неё в автоматическом режиме. Причём запуск можно произвести лёгким подбросом квадрокоптера в воздух.
Tello имеет целый ряд предустановленных функций для фото- и видеосъёмки (например, Circle Mode, 360 Grad, Up-and-Away). Стабилизация изображения производится цифровым образом, не механически. За это отвечает встроенный 14-ядерный процессор от Intel. Квадрокоптер снимает 5 Мп фото. Кроме того, Tello совместим с VR-очками. И при этом его вес – всего 80 гр
Кроме всего прочего у новинки есть ряд полезных функций для безопасности полёта. Одним движением пальца в приложении дрон может автоматически взлететь или совершить посадку. С помощью визуальных и звуковых сигналов Tello предупреждает о близком разряде аккумулятора.
Шаг №1. делаем корпус
Проектируем на SolidWorks и распечатываем на 3D-принтере корпус будущего дрона. В качестве прототипа можно взять одну из существующих моделей квадрокоптеров, а если есть навыки, то лучше доработать параметры корпуса за счет сот, которые снижают общий вес устройства.
Обратим внимание, что желательно передние лучи или пропеллеры выполнить другим цветом.
Это позволит проще ориентироваться в пространстве и всегда понимать, где передняя часть дрона, чтобы быстрее им управлять в полете.
Если у вас нет доступа к 3D-принтеру, то альтернативой станет покупка уже готовых лучей в одном из интернет-магазинов. Еще одним вариантом станет изготовление корпуса из подручных средств. Например, раму можно изготовить из куска фанеры, а для лучей, удерживающих двигатели, подойдут пластиковые трубы.
Шаг №3. скетч для arduino
После подключения к Arduino платы MPU-6050 необходимо загрузить скетч I2C scanner code, куда вставляется код программы. Обратим внимание, что на этом этапе пригодятся хоть минимальные познания в программировании на Arduino, поэтому при отсутствии даже них стоит сделать небольшую паузу и разобраться с особенностями.
Теперь откройте серийный монитор Arduino IDE (он находится в разделе Tools на вкладке Serial Monitors) и убедиться в наличии подключенного 9600. Если все предыдущие этапы были выполнены верно, то будет обнаружено устройство I2C с присвоенным адресом 0х69 или 0х68, который нужно записать.
Теперь можно загрузить один из скетчей, который будет постоянно обрабатывать информацию с акселерометра и гироскопа. В интернете подобных скетчей для Arduino достаточно много, поэтому выбирайте любой, но ориентируйтесь на отзывы пользователей. После скачивания подобного скетча проведите его разархивирование.
Теперь обязательно откройте файл MPU6050_DMP6. Если у вас был присвоен адрес 0х69, то обязательно нужно расскоментировать строку после #includes, так как по умолчанию присваивается 0х68. На этом этапе уже можно получить первые значения с гироскопа и акселерометра. Для этого загрузите программу и откройте с 115200 окно серийного монитора, следуя дальнейшим инструкциям.
https://youtube.com/watch?v=Laibu0cr7Ko%3Ffeature%3Doembed
После сборки квадрокоптера на Arduino нужно будет откалибровать параметры акселерометра и гироскопа. Для этого достаточно найти ровную плоскую поверхность и поставить на нее плату. Теперь достаточно запустить скетч для проведения калибровки, после которой имеющиеся отклонения записываться и учитываются в скетче MPU6050_DMP6.
Что нужно для сборки квадрокоптера
Набор деталей и расходных материалов может меняться в зависимости от того, какой именно дрон нужно сделать своими руками. Но базовый список элементов выглядит следующим образом:
- рама, на которой будут закреплены все остальные детали;
- четыре специальных двигателя для дрона;
- четыре пропеллера;
- четыре регулятора оборотов для винтов;
- два красных и два черных провода в силиконовой оболочке для моторов;
- силовой разветвитель 3,5 мм;
- литий-ионный аккумулятор — один или несколько;
- плата управления;
- зарядное устройство для батарей питания;
- пульт радиоуправления.
Чтобы собрать квадрокоптер из запчастей, практически все специфические детали можно приобрести в Интернете, например, через сервис АлиЭкспресс.
Важно! Пропеллеры для двигателей лучше брать с запасом, поскольку они быстро выходят из строя.
Чертежи и схемы квадрокоптеров
Чертежи для сборки квадрокоптера могут незначительно различаться между собой. Детали зависят от габаритов собираемого своими руками дрона, от его формы и конструктивных особенностей. Но базовый чертеж обычно предлагает сделать маленький квадрокоптер на крестообразной силовой раме с размерами 363 на 363 см. Параметры корпуса при этом составляют около 107 на 107 см, в таком случае в дроне без проблем размещаются основные детали.

Стандартно самодельные дроны собирают на рамах из четырех лучей
Структурная схема квадрокоптера выглядит очень просто. В центре конструкции на силовой раме всегда располагается электронная плата управления. По четырем углам на равном расстоянии друг от друга нужно поставить двигатели с закрепленными на них пропеллерами. В корпус в центре конструкции монтируют также элементы питания и радиодатчики для удаленного пилотирования.

Регуляторы оборотов на лучах необходимы для дронов, предназначенных для маневрирования
Важно! При сборке дрона своими руками нужно следить за тем, чтобы основная масса конструкции приходилась на центр и не смещалась в ту или иную сторону.
Как сделать самодельный квадрокоптер из бумаги
Простейший вариант сборки предлагает выполнить корпус аппарата из плотной бумаги. Такой квадрокоптер своими руками для начинающих будет очень легким, и управлять им в ветреную погоду не получится. Зато и больших расходов он тоже не потребует.
Сборка корпуса из бумаги

Бумагу для дрона нужно брать плотную, чтобы она не сминалась в процессе использования
Из готового шаблона острыми ножницами или ножом вырезают отдельные детали. После этого приступают к склеиванию частей — использовать можно ПВА или Момент по желанию. Важный нюанс состоит в том, что клея нужно наносить совсем немного и сразу же убирать его излишки. Даже небольшие застывшие капельки в конечном итоге влияют на массу и балансировку коптера.
Промазанные детали прикладывают друг к другу и слегка прижимают. После этого корпус оставляют сохнуть, а потом визуально проверяют качество сборки.
Установка электронной начинки
Чтобы бумажный дрон взлетел, на него необходимо монтировать электронику. Пошаговая инструкция для квадрокоптера своими руками выглядит так:
- сначала в центральной части рамы снизу устанавливают чипами вверх полетный контроллер с микропроцессором, полевыми транзисторами и сенсорами;
- затем при помощи той же клейкой ленты по углам располагают моторы и подводят к ним провода, закрепив их скотчем во избежание наматывания на винты;
- в центре рамы на двусторонний скотч ставят аккумулятор и соединяют его с моторами.
Готовый квадрокоптер своими руками из подручных материалов можно испытывать при помощи заранее приобретенного пульта управления.

Бумажный коптер требует использования максимально компактных и легких деталей при сборке
Как сделать мини-дрон своими руками в домашних условиях
Небольшой квадрокоптер можно смастерить своими руками из нескольких покупных деталей, клея и палочек от мороженого-эскимо. На его сборку понадобится потратить около 15 минут времени и минимум усилий.
Сборка силовой рамы дрона
Проще всего использовать для сборки самодельной рамы для квадрокоптера палочки от мороженого. Их склеивают между собой горячим или холодным клеем в виде решетки.

При сборке рамы дрона из палочек нужно следить, чтобы конструкция была пропорциональной
Установка электронной части и моторов
При помощи того же клея в центральной части рамы закрепляют аккумулятор, а по углам ставят четыре двигателя с мини-винтами. Под батареей питания закрепляют электронную плату, отвечающую за прием сигнала с пульта, и соединяют ее со всеми моторами. Чип контроля подключают также к аккумулятору.

После закрепления ножек мини-дрона нужно убедиться, что конструкция стоит на поверхности ровно
Проверка работоспособности
Собранный своими руками бюджетный квадрокоптер устанавливают на ножки, аккуратно прижимают отверткой к поверхности и нажимают на кнопку старта на пульте. Если пропеллеры благополучно закрутятся, дрон сделан успешно и сможет взлететь при проведении первого настоящего испытания.
Внимание! Мини-коптер, выполненный своими руками, не будет поддерживать регулировку оборотов и смену направления движения. Предназначена такая простая модель только для взлета и посадки.
Как сделать квадрокоптер с камерой своими руками
В домашних условиях реально провести сборку не только примитивного дрона, но и профессионального квадрокоптера своими руками. Для этого понадобится приобрести базовые детали — аккумуляторы, контроллер полета, моторы, провода и пульт ДУ. Также нужно купить камеру — компактную и легкую, но с хорошим разрешением.
Сборка рамы
Бумажная и картонная рама для коптера с камерой не подойдет, конструкция будет слишком тяжелой. При желании можно заказать готовую основу для дрона в Интернете. Но очень просто выполнить сборку и своими руками, например, из водопроводных пластиковых труб или легких алюминиевых профилей. Скрепляют детали между собой при помощи винтов или фитингов. На концах лучей рамы снизу можно сразу же прикрутить ножки, на которых будет стоять дрон.

Алюминиевая рама достаточно легкая и при этом очень прочная
Установка моторов
На каждом из лучей рамы необходимо установить по мощному компактному мотору. Закрепить их можно при помощи термоклея или резьбы. На верхнюю часть двигателей надевают винты. Лопасти для квадрокоптера своими руками обычно не делают — это требует использования фрезеровочного станка. Купить готовые пропеллеры намного проще и практичнее.

Винты для дрона с камерой лучше использовать с двумя лопастями — вибрация будет меньше
Сборка электроники
В центральной части аппарата устанавливают плату управления. Крепить микросхему лучше всего горячим клеем. Двусторонний скотч для массивных конструкций используют реже, поскольку он не обеспечивает надежной сцепки.

Контроллер для дрона с камерой следует выбирать подороже, с датчиками и режимами полета
Установка камеры
Для сборки летающего дрона своими руками для съемки оптимально использовать GoPro — легкую, небольшую по размерам экшн-камеру. В верхней или нижней части рамы для нее необходимо сделать специальную пенопластовую платформу, которая станет гасить вибрации от корпуса при полете. Камеру для надежности плотно закрепляют резинками.
Камеру на дроне можно закрепить в любой точке с хорошим обзором и минимумом вибрации
Установка регуляторов оборотов и подключение проводов
На данном этапе квадрокоптер для видеосъемки своими руками почти готов. Остается только соединить регуляторы оборотов с моторами и контроллером, а потом подключить плату управления к батареям питания. Также нужно не забыть вывести на полетный чип провода от камеры.

Моторы дрона с камерой в сумме должны давать подъемную силу, превышающую вес аппарата
Как сделать гоночный квадрокоптер своими руками
Сборка гоночного дрона по сути ничем не отличается от конструирования обычного квадрокоптера. Разница состоит в подходе к выбору деталей — нужно уделить особое внимание моторам, раме и винтам.
В случае с гоночным дроном основу лучше приобретать готовую. Она обеспечит оптимальную балансировку аппарата. Хорошим вариантом для сборки станет легкая и прочная рама из карбона со стандартными четырьмя лучами.
Сборка моторной части
Моторы для гоночного коптера закрепляют на лучах рамы винтами в специальных отверстиях. Двигатели должны быть достаточно мощными — например, хорошо подойдут 2205-2600 KV. В центральной части лучей устанавливают регуляторы оборотов и соединяют проводами с моторами. Винты для сборки гоночного дрона можно выбирать с двумя или тремя лопастями — первые дадут большую скорость, вторые облегчат процесс маневрирования.

Регулировка оборотов гоночному коптеру нужна обязательно, иначе он не сможет маневрировать
Стандартным способом на центральной пластине рамы закрепляют плату управления. Ее можно посадить на горячий клей или просверлить отверстия и зафиксировать небольшими винтами. В последнем случае конструкция после сборки получится надежнее. К раме прикрепляют приемник сигнала, который будет передавать команды на плату управления. Аккумулятор традиционно монтируют в нижней части устройства отдельно от микрочипа.

Камеру в гоночном дроне фиксируют в специальном гнезде на готовой раме
Подсоединение проводов
На финальном этапе сборки остается подключить к плате управления провода, отходящие от камеры и моторов. Сам микрочип при этом соединяют с аккумулятором.

При прокладке проводов нужно следить, чтобы они оставались подальше от лопастей дрона
Как сделать квадрокоптер для человека своими руками
Дрон для человека — пока что крайне редкий, небезопасный и дорогостоящий вариант для самостоятельной сборки. Общедоступных инструкций того, как самому в домашних условиях сделать квадрокоптер с огромной подъемной силой, пока не существует, поскольку обладателей таких аппаратов очень немного.
Однако краткий алгоритм создания грузоподъемного дрона можно описать, опираясь на стандартную схему.
Рама
Для сборки самодельного большого квадрокоптера подойдет только металлическая рама из стали, карбона или прочного алюминия. Другие конструкции просто не смогут поднять всю электронику и владельца дрона.

Болты для скрепления элементов рамы должны быть рассчитаны на нагрузку свыше 100 кг
Установка моторов и регуляторов оборотов
Двигатели для мощного квадрокоптера своими руками устанавливаются на лучах силовой рамы. Принципиальное внимание нужно уделить их производительности — суммарная тяга должна быть не меньше 120 кг. Добиться такого показателя реально при помощи восьми бесколлекторных моторов на 3 кВт каждый. К двигателям необходимо докупить регуляторы не менее 80 А. Детали соединяют между собой при сборке проводами, а к раме крепят исключительно на прочных винтах.

Для мощного дрона лучше брать моторы средней производительности со сниженной собственной массой
ЁСборка системы управления
Плата с процессором в квадрокоптере для человека должна поддерживать регулировку оборотов пропеллеров, стабилизацию и смену направления. Ставят ее, как и во всех случаях, на центральной площадке, закрепляя винтами в просверленных отверстиях, и соединяют с моторной частью и приемником сигнала.
Аккумуляторов для коптера понадобится сразу несколько, и они должны обладать максимальной мощностью. Батарее придется питать восемь производительных моторов и к тому же поддерживать дрон в воздухе на протяжении хотя бы десять минут. Чтобы конструкция не получилась слишком громоздкой, при сборке проще связать аккумуляторы в съемный ранец, который сможет надеть на спину владелец.

Управление дроном для человека проводится с обычного пульта самим оператором
Посадочные ноги дрону для человека не пригодятся. Но понадобится предусмотреть в конструкции прочный подвес с лямками, который будет отвечать непосредственно за удержание оператора.
Внимание! Построить квадрокоптер для человека довольно дорого. Цена исчисляется десятками тысяч рублей, основные деньги уйдут на покупку моторов и батарей питания.
Собираем самодельный квадрокоптер
Сделать самодельный квадрокоптер своими руками не сложно. Это гораздо проще, чем, к примеру, сделать самодельную авиамодель или радиоуправляемый вертолет.
Основа самодельного квадрокоптера – это рама. Ее можно купить готовую или сделать своими руками.
Самый простой вариант – купить готовую раму.
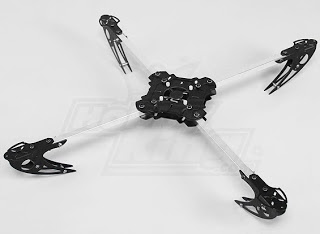
Рама Hobbyking X525 V3
Габариты: 600 мм
Материалы:
Ноги и центр. часть: текстолит
Лучи: алюминий
Цена: 550 рублей
Преимущество готовой рамы над самодельными в том, что все уже подготовлено для установки электроники и не надо искать материалы для изготовления. Впрочем, раму для самодельного квадрокоптера можно сделать своими руками из практически любых материалов.

Вот, к примеру, квадрик изготовленный из линеек и пеноплекса (пенопластовый утеплитель).

А этот самодельный квадрокоптер сделан из пластиковых труб для водопровода.
Причем, такие самодельные квадрокоптеры летают ничуть не хуже заводских!

Если вы хотите сделать красивый и оригинальный квадрокоптер – то смотрите эту статью. В ней вы найдете чертежи квадрокптера как на фотографии выше и подборку электроники для него.
Но рама в четырех моторных агрегатах – не главное! Главное в них это мозги – плата управления с гироскопами, магнитометром и бародатчиком.
Давайте посмотрим, какую плату можно поставить на квадрокоптер сделанный своими руками.
%5B1%5D.jpg)
HobbyKing KK
Это самая дешевая и простая плата управления квадрокоптером. На ней установлены только 3 гироскопа. На самодельный квадрокоптер такую ставить можно только в случае если не планируются полеты с помощью камеры (FPV полеты) и только в случае максимального удешевления квадрика. Такие (или подобные ей) платы ставят на квадрокоптеры-игрушки или дешевые квадрокоптеры на Ebay. Для настройки квадрокоптера придется докупить ISP программатор.
MultiWii Lite V1
MPU6050 6-ти осевой гироскоп
Цена: 960 рублей
Достоинства MultiWii Lite V1. 0 – небольшие размеры, всего 40х40 мм и вес 9 грамм. В комплекте идет программатор для подключения к USB порту компьютера. Эта плата управления квадрокоптером идеально подходит для изготовления небольших квадрокоптеров своими руками.
%5B1%5D.jpg)
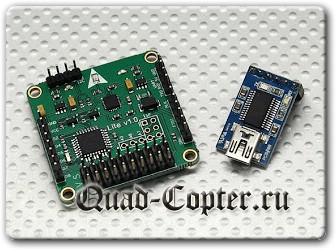
MultiWii 328P
ITG3205 Трехосевой гироскоп
BMA180 Акселерометр
BMP085 Барометр
HMC5883L Магнетометр
Цена: 1050 рублей
MultiWii 328P – это наиболее оптимальная по отношению цена/качество плата управления. Программатор вшит в плату, акселерометр позволяет компенсировать дрейфы гироскопов, бародатчик – автономно висеть на заданной высоте, а магитометр (фактически компас) включать режим управления, когда коптер может лететь по прямой вращаясь вокруг своей оси.
Такое сочетание датчиков позволяет не только полностью автономно контролировать квадрокоптер, но и управлять гироподвесом камеры держа ее параллельно горизонту при любых эволюциях самодельного квадрокоптера.
Регуляторы оборотов для квадрокоптеров и мультироторных летательных аппаратов
Однако, кроме платы управления не малую роль играют регуляторы оборотов электродвигателей. Рекомендуется покупать специальные регуляторы для квадрокоптеров – Turnigy MultiStar, их не надо дополнительно перепрошивать.
Для самодельного квадрокоптера размерами 450-600 мм подойдет следующие регуляторы:
%5B1%5D.jpg)
Turnigy Multistar 2216-800Kv
Цена: 990 рублей
Купить мотор для квадрокоптера можно
Под регулятор на 30 А.
Обсудить на форуме
#
—
0
Плата MultiWii 328P, ее можно заменить я так понимаю на более мощную вот эту Multiwii and Megapirate AIO Flight Controller w/FTDI (ATmega 2560) или вот эту Полетный контроллер MultiWii MicroWii на МК ATmega32U4 USB/BARO/ACC/MAG ??? Если нет то какие подходят для создания “летающей камеры”. Я в этом новичек поэтому сильно не пинайте. И я так понимаю для подвеса камеры приведенный тут каркас не подходит?
КвадроЛетчик
#
—+1
Фактически можно ставить любой полетный контроллер. На сегодняшний день наиболее хорошо отзываются о Naza. Для автовозврата квадрокоптера при потере связи нужна плата с поддержкой модуля GPS и сам модуль. Если не отлетать дальше 100 метров и использовать только режим “ручного управления” – то подойдет любой. Если предполагается “удержание точки висения в автоматическом режиме” то посоветую Naza Lite с GPS или Naza V2 с GPS. Multiwii и Megapirate – контроллеры хорошие, к ним можно подключать GPS, но в настройках надо разбираться и поднастраивать под свой квадрик. Не слишком сложно, но пару дней займет. Та же Наза фактически “летает из коробки”, за что ее и любят, не смотря на более высокую цену.
Варяг
#
—
0
А можно ли сделать такой же с двигателем внутреннего сгорания. Это не шпионская штука ( звук выхлопа). К примеру для обследования ЛЭП. Естественно с полетом по картинке камеры и скорее всего по сетке типа прицельной ( ЛЭП не игрушки), Это если учитывать возможность повреждения ЛЭП роторами и корпусом ( нельзя использовать углепластики и стеклоткани без покрытия? знаете почему).
konst
#
—
0
Нет. Только если ДВС будет крутить генератор, а моторы с винтами будут стоят электрические. Попытки сделать квадрик на двс были, но толку не имели, тк двс весьма медленно меняют обороты и имеют большую вибрацию. Дальнейшее обсуждение этой темы возможно только в форуме.
Варяг
#
—
0
Может и будет крутить. Кстати мне очень не нравится слабость эл. моторов такой техники ( хотя компенсацию порывов ветра на электротяге делать проще) и естественно автономка с батареями ( ну не просить же продать /отдать батареи СЦД -5). Заряжать долго и батареи Li -on не панацея. Хотя не спорю управлять проще и рулевые машинки (которые дороги) не нужны.
konst
#
—
0
Ничего, что современные бесколлекторники на порядок мощнее ДВС при том же весе? А LiPo заряжаются за 10 минут?И да, классической схемы мульткоптеров на ДВС просто не существует (лабораторные проекты не в счет – они и в лабораториях толком не летают).
Digides
#
—
0
А почему нет? Только сложнее намного получится. Двигатель, четыре вала на винты, вместо регулирования оборотов регулирование шага рулевыми машинками. Проблема будет в том, что не получится просто подобрать набор стандартных компонентов. По крайней мере “раздаточную коробку” придется самому сочинять и изготавливать.
konst
#
—
0
Дисскуссия уже не по теме статьи, предлагаю переместиться в форум. По теме – попробуйте сделать, потом поделитесь результатами. На электродвигателях такие варианты продаются, привод на зубчатых ремнях.
Илья
#
—
0
Можно. Их полно уже сделано и они летают. Вертолёт называется, не слышал?
Qaz
#
—
0
Я хочу самодельный дрон с грузоподъёмностью 1 кг,какие “мозги и т. ” нужно???
Guest
#
—
0
здраствуйте , хочу спросить: обязательно ли покупать регуляторы скорости? или можно без них? и ещё: плата и регулятор полёта это разные вещи?
konst
#
—
0
Упрощенно: регулятор получает цифровой сигнал и на основании его преобразует постоянный ток в фазовый, управляя тем самым оборотами двигателя. Так что без регуляторов – никак!
peppa
#
—
0
Как делают квадрокоптеры без регуляторов? например Syma x5 там их нету. возможно лои собрать без них как у Syma x5?
COPterMan
#
—
0
Там коллекторные двигатели (2 провода), их хватает примерно на 100 полетов. Потом менять. Впрочем, часто и после 15-20 полета один из двигателей – под замену. Коллекторные регуляторы сделаны прямо на плате. В DJI Phantom 3 – та же история, регуляторы на плате, если сдохнет регулятор (бывает при падении, мотор не отключился уперся винтом и регулятор сгорает), менять придется всю плату. Все разговоры о регуляторах, почему и как, а так же подбор электроники предлагаю вести только в коптероном форуме. Тут такие сообщения будут удаляться.
а10
#
—
0
Интересно, а как можно оценить вес, которой может поднять коптер? Вот, например, мне нужно поднять 500 граммов. Как исходя из этого расчитать коптер?
konst
#
—
0
Зарегистрируйтесь, создайте в форуме тему, опишите что именно вы хотите поднимать и как долго и куда носить. 500 грамм – это обычно полноценная фотокамера с подвесом. У фото полетов своя специфика и коптеры под нее имеют отдельные особенности.
Antosh
#
—
0
Можно по порядку перечислить, что нужно, чтобы собрать 4коптер?
EgorSy
#
—
0
Здравствуйте! Подскажите, пожалуйста, можно ли вместо MultiWii 328P, использовать MultiWii SE v2. 5 ? Насколько сильно они отличаются?А если использовать APM 2. 6? Насколько сложно будет его настроить? Стоит ли его брать?
Игорь
#
—
0
Здравствуйте! Можно собрать квадрик своими руками на карбоновой раме? Для проф. видеосъёмке, чтобы висел не шелохнувшись и летал за 3-4 км. ? Наличие GPS обязательно. Подскажите какие комплектующие нужны? Или марку готового, но желательно весом не менее 3-4 кг. Спасибо.
konst
#
—
0
Можно, но лучше обратиться к тем, кто это делает на проф. основе. Так как потребуется доступ к ЧПУ станку или 3Д принтеру. Современные GPS/ГЛОНАСС приемники вполне позволяют получить зависание в одной точке. Для компенсации порывов ветра необходим 3Д подвес. Подбирать комплектующие необходимо комплексно, обычно начинается с того, что решается какую камеру катать. Затем – рассчитывается масса подвеса (берется готовый или делается самостоятельно), От веса подвеса с камерой стартуется обсчет самого квадрокоптера. Надо учесть – будет ли 8 моторов на 4-х осях (защита от падения при поломке любого из моторов) или упростить конфигурацию (и удешевить ее) до стандартных 4-х моторов. Под конфигурацию побираются моторы, регуляторы, аккумуляторы, выбирается полетный контроллер (минимальные настройки или максимальный ручной тюнинг настроек), делаются чертежи и по ним приступают к изготовлению деталей и сборке. По сути – процесс сборки это рутина. По времени, 90% тратится на подготовительный этап.
Елена
#
—
0
Добрый день!Встал вопрос создания 3D модели участка местности с сеткой точек 1м х 1м. Участок 223 Га с перепадами высот по гугл карте от +40 до +140 (холмы). Так как проект не коммерческий, то хочу обойтись своими силами и собрать свой коптер. Подскажите пожалуйста на какие модели деталей (желательно не шипко дорогие) нужно обратить внимание?По функциям дрона хотелось бы иметь:1. Авто взлет2. Авто посадка3. Возврат по низкому заряду батареи или нештатной ситуации. Программируемость маршрута и высоты полета (т. возможность задания сетки точек для облета до полета. Камера 4К (или возможность нести на себе аналог Гоупро или Wifi IP камера)6. Авто Облет препятствий. Дальность 3-5км с обратной связью (в процессе полета видеть что он там снимает и писать на внешний источник поток видео с дрона)8. Время в полете от 30 минут9. GPS10. Возможность записи высот по точкам облета. (высоты над ур. моря точки на земле)И еще есть пылесосы которые умеют парковаться на базу и заряжаться. Вопрос. А квадрокоптеры есть такие, которые умеют самостоятельно парковаться на базу для подзарядки??(это чисто моя фантазия. На стройке для хозяина удобная фишка. Прям с компа стартовать дрон и смотреть за стройкой. или автоматизация охраны, сработал датчик движения и двон стартовал посмотреть и записать что там шевелится
Максим
#
—
0
Здравствуйте, подскажите пожалуйстаИспользуя компоненты, указанные на этом сайте, инструкции по сборке, то собрать модель работающего квадрокоптера реально, но, после его сборки какие шаги следует предпринять, чтобы прошить контроллер и пульт? Какая среда и какая прошивка является универсальным вариантом
konst
#
—
0
Пульт прошивать не надо. На первых порах вам будет достаточно его штатных возможностей. По поводу как прошить контроллер – надо смотреть мануалы на сам контроллер. Настройка дрона заключается в указании PID в полетном контроллере. Про это есть статьи на этом сайте – как правильно подобрать правильные значения. Можно поставить Naza Lite или Naza V2 – они не требуют тонкой настройки. Установил и летай! Сейчас их не выпускают, но можно найти на вторичном рынке.
Новые видео о дронах – ежедневные обновления!


