

- Насколько хорошо вы знаете свой дрон?
- Режим позиционирования / Positioning Mode
- Где лучше попрактиковаться в пилотировании?
- Режим ориентации / Attitude Mode
- Предполётный чек-лист
- Взлёт и посадка
- Полезные советы
- Режим жестов / Gesture Mode
- Важность понимания того, как летает и работает квадрокоптер
- Используйте автоматические настройки съемки с дрона
- Используйте правильную частоту кадров
- Как работает квадрокоптер
- Комбинируйте движения дрона и камеры
- Навигация квадрокоптера с использованием монокулярного зрения
- Направление двигателя для рыскания
- Направление пропеллеров – рыскание, тангаж, крен
- Направление пропеллеров для вертикального подъем
- Правый стик управления
- Простота и глупость
- Сохраняйте плавность
- Учимся управлять квадрокоптером быстро, безопасно и бюджетно
- Фактор редактирования полос ошибок
Насколько хорошо вы знаете свой дрон?
Прежде чем подняться в воздух, потратьте несколько минут на знакомство с вашим дроном. Изучите элементы управления, настройки и узнайте ключевую информацию о работе аккумулятора. Не лишним будет также изучить законодательную часть затрагивающую эксплуатацию беспилотных летательных аппаратов в месте осуществления полётов. Ознакомьтесь с последними рекомендациями и обучающими видео.
Даже если вы никогда ранее не пилотировали дроном, вы вполне можете стать мастером за короткое время, немного попрактиковавшись. Для этого функциональность многих моделей предлагает специальные режимы для начинающих или FPV симуляторы.
Последние в большей степени позволяют освоить пилотирование, не подвергая опасности ни свой дрон, ни других людей. Например популярные сегодня DJI дроны предлагают сразу обе опции: FPV симулятор (DJI Flight Simulator), позволяющий подключить идущий в комплекте с дроном пульт управления к вашему смартфону или планшету, и специальный режим для новичков (Novice mode), который ограничивает высоту и скорость полёта дрона.
Режим позиционирования / Positioning Mode
Режим позиционирования, или P-Mode, также относится к числу стандартных режимов. Его работа основана на использовании модуля GPS и оптических датчиков для стабильного парения. Как правило, у дрона есть две разновидности режима P-Mode: P-GPS и P-OPTI.
Когда беспилотник находится в режиме P-GPS, он использует данные геопозиционирования летательного аппарата, поступающие с модуля GPS. Они используются для компенсации горизонтальных смещений, вызванных ветром, и обеспечивают коптеру устойчивое горизонтальное положение в полете.
Когда дрон теряет сигнал GPS, он может перейти в режим P-OPTI. В этом случае аппарат больше не сможет сохранять свое горизонтальное положение и будет подвергаться воздействию внешних факторов. Однако, несмотря на это, работа оптических датчиков поможет квадрокоптеру (или другому типу мультикоптера) лететь, избегая препятствий.
Где лучше попрактиковаться в пилотировании?
Когда вы освоите управление в FPV симуляторе и будете готовы подняться в небо, следующим важным шагом будет предполётное изучение окружающей обстановки. Когда вы прибываете на новое место, всегда уделите минуту времени на изучение местности вокруг вас.
Это делается с той целью, чтобы минимизировать неожиданные ситуации при взлёте и полёте. Обратите внимание на то, где находятся здания, деревья и линии электропередач, чтобы вы могли безопасно управлять своим дроном. Обязательно проверьте, где находятся местные аэропорты и вертолётные площадки; в целях безопасности исключите полёт вблизи них. Ознакомьтесь с местными правилами и регламентами полётов, чтобы летать спокойно.
Перед каждым полётом обращайте внимание на местность и погодные условия; ветер, дождь и температура могут существенно повлиять на результаты/качество полёта. Так например будет правильным отложить полёт, если вы понимаете, что в ближайшее время возможно пойдёт дождь.
Дождевая вода может не только повлиять на электронное оборудование дрона, но и затруднить видимость и передачу сигналов. Как и дождь, ветер и температура также могут повлиять на полёт, в том числе и на время работы аккумулятора. Всегда следите за уровнем заряда батареи вашего дрона, чтобы у вас было достаточно времени для возвращения и посадки.
Режим ориентации / Attitude Mode
Иногда возникает ситуация, когда дрон может потерять как сигнал GPS, так и данные с оптических датчиков. Однако для таких случаев имеется бортовой барометр, с помощью которого летательный аппарат в состоянии удерживать высоту. И все же, в таком положении возникает опасность дрейфа, а сам полет в режиме ориентации становится крайне сложным. И это в полной мере касается не только новичков, но и опытных пилотов.
Сложности пилотирования в этой ситуации обусловлены необходимостью постоянно компенсировать горизонтальные сносы для удержания стабильного курса полета. Без данных геопозиционирования летательный аппарат передвигается в воздухе относительно направления своей носовой части, а это может дезориентировать пилота.
Несмотря на трудности полета в режиме ориентации, это излюбленный режим пилотирования многих кинооператоров и режиссеров. Причина этого довольно проста. Постоянная GPS-компенсация может генерировать резкие движения, которых нет в режиме ориентации что приводит к более плавным кадрам аэросъемки.
Кроме этого, отсутствия автоматического торможения, которое также отключается в режиме ориентации, помогает летательному аппарату останавливать более плавно и естественно, как только пилот отпускает управление. Для съемок это тоже очевидное преимущество.
Предполётный чек-лист
Перед тем как приступить к взлёту, пилоты любого воздушного судна всегда проводят визуальную проверку элементов судна на предмет их целостности согласно предполётному чек-листу. Вам как пилоту дрона также рекомендуется перед каждым полётом прочекать следующее:
- Проверьте физическое состояние дрона. Ищите следы износа или повреждения на фюзеляже, лучах (рычаги на которых установлены моторы), пропеллерах. Кстати пропеллеры являются самым хрупким компонентом дрона. Эксплуатация деформированных, имеющих любого рода повреждения пропеллеров не допустимо!
- Ознакомьтесь с правилами и регламентами полётов того места, где вы планируете летать.
- Убедитесь, что батареи полностью заряжены и имеют достаточную мощность для полёта.
- Перед включением дрона не забудьте снять транспортировочную защиту подвеса камеры!
- Проверьте, статус готовности всех основных электронных компонентов дрона, а также статус сопряжения пульта с дроном. Обращаем ваше внимание на то, что программное обеспечение большинства современных дронов содержит специальный раздел, в котором демонстрируется готовность ключевой электроники к работе (текущий полётный режим, состояние сенсоров визуализации, компаса, IMU, АКБ и т.д.).
- Обратите внимание на погодные условия. Например, на скорость ветра, который обычно сильнее на больших высотах, чем на уровне земли. Используйте для информирования различные мобильные приложения, такие как UAV Forecast (iOS/Android; Поддерживает интерфейс на русском языке).
- Проверьте, свободна ли зона вокруг вашего дрона для взлёта и посадки.
- Проверьте настройки вашей камеры. Возможность полноценно видеть то, что видит камера вашего дрона, сделает полёт более безопасным.
- Убедитесь, что в вашем дроне есть карта памяти, если вы планируете снимать.
- Сообщите всем, кто находится рядом с дроном, что вы собираетесь взлететь
- Следите за окружающей обстановкой во время полёта
Как только вы освоитесь с управлением и принципами работы дрона, помните, что только практика совершенствует ваш скилл, с улучшением которого вы сможете безопасно развлекаться и проявлять творческий подход. Вас ждёт целый новый мир.
Взлёт и посадка
Самый важный момент в управлении дроном — это взлёт и посадка. Убедитесь в том, что вы выбрали открытую площадку, которая позволит вам безопасно управлять дроном. Выберите площадку, где нет деревьев, линий электропередач и всего того, что может препятствовать линии обзора.
При взлёте следуйте приведенному ниже перечню мер безопасности, чтобы убедиться, что ваш дрон находится в оптимальном лётном состоянии. Наблюдайте за окружающей обстановкой и обязательно предупредите присутствующих находящихся в непосредственной близости о том, что вы планируете взлететь.
Перед включением дрона не забудьте снять транспортировочную защиту подвеса камеры! Включите питание, обратив внимание на текущий уровень заряда батареи, а также ключевые настройки дрона (например важно проверить настройки режима автоматического возврата домой: действие дрона при потере связи/высота возврата, которая должна быть выше препятствий с которыми потенциально может встретиться дрон при автоматическом возврате).
После проверки настроек дрона увеличьте газ настолько, чтобы он поднялся на полметра/метр от земли. Пока дрон удерживает позицию, продолжите проверять его работоспособность, как визуально, так и посредством программного обеспечения.
В случае возникновения проблем, вы должны быть готовы быстро посадить коптер, из чего следует, что вам также нужно заблаговременно определить и проработать пути быстрой и уверенной посадки дрона в экстренном случае. Если коптер работает правильно и погодные условия соответствуют требованиям, приступайте к набору необходимой для полёта высоты.
На протяжении всего полёта чекайте уровень заряда батареи вашего дрона. Всегда оставляйте себе дополнительное время, чтобы несмотря ни на что вернуть коптер к месту посадки. Стоит понимать, что во время полёта могут возникнуть непредвиденные ситуации, например, если вы вылетели в штиль или по направлению ветра, то возврат к месту взлёта с большей долей вероятности будет против ветра, данный факт неизбежно скажется на скорости разряда АКБ и в конечном счёте вы можете попросту не дотянуть до места взлёта.
Исходя из нашей лётной практики, мы рекомендуем начинать возврат к месту взлёта уже на 70-60% остаточного заряда, такой подход обеспечивает уверенный возврат независимо от внешних факторов и скорости горизонтального полёта. При возврате на 50% остаточного заряда при соблюдении оптимального скоростного режима, вероятнее всего вы вернётесь к месту взлёта с остаточным зарядом равным 3-4%.
Ну а при возврате на остаточном заряде ниже 50% вы рискуете вернуться к месту взлёта в лучшем случае с нулевым зарядом (решает опыт пилотирования). Также стоит напомнить о том, что ввиду самой природы литиевых аккумуляторов их разряд в оптимальных условиях полёта со 100% до 50% протекает куда медленнее, чем с 50% до 0%. Стоит это учитывать!
Когда вы будете готовы посадить беспилотник, объявите всем, кто находится рядом с местом посадки, что дрон возвращается обратно. Подведите коптер к посадочной площадке, плавно снижая скорость. Медленная и осторожная посадка — это главное, когда речь идёт о безопасности.
Приземлите дрон и убедитесь, что пропеллеры перестали вращаться. Когда дрон окажется на земле и двигатели остановятся, прежде чем перемещать дрон или снимать пропеллеры, выключите его питание, отключив аккумулятор.
Полезные советы
- Перед включением дрона не забудьте снять транспортировочную защиту подвеса камеры!
- Всегда держите при себе запасные батареи. Чтобы ваш дрон мог летать в течение длительного времени.
- Держите при себе посадочную площадку. Этот пункт может показаться немного очевидным, но в некоторых ситуациях он может стать решающим элементом. Складная посадочная площадка, кусок дерева или даже свернутый ковер помогут вам взлететь в длинной траве, снегу или даже в пыли.
- Изучайте карты! Посмотрите на спутниковые карты, чтобы найти новые места для полётов. Если вы ищете широкие просторы или интересные достопримечательности для съёмки, достаточно провести небольшой мониторинг, чтобы найти новые замечательные места.
- Развлекайтесь, но будьте уважительны! Дроны — это очень весело, но вы должны держаться на безопасном расстоянии от людей, машин и домов.
- После полёта не спешите снимать пропеллеры, так как зачастую моторы дрона будут очень горячими и соответственно есть риск получить ожёг.
- Храните свой дрон в жестком кейсе или защитной сумке. Ваш дрон — это инвестиция, берегите его во время транспортировки. Транспортировочный кейс также позволит вам всегда иметь при себе аккумуляторы и зарядные устройства.
- Используйте свой дрон, когда вы отправляетесь на поиски приключений и исследований. Путешествуйте с ним, ходите с ним в походы, исследуйте с ним. С помощью дрона вы можете открыть для себя новые удивительные перспективы и ракурсы. Получайте удовольствие и проявляйте творческий подход!
Режим жестов / Gesture Mode
Режим жестов впервые появился на старших моделях Mavic. Затем он был внедрен на популярную сегодня компактную модель Spark, где функционал этого режима был расширен. И хотя этот режим сегодня можно встретить не на всех моделях DJI, тем не менее он пользуется популярностью, особенно при управлении камерой для определенных режимов и стилей съемки (Селфи).
У Spark режим управления жестами также позволяет запускать дрон с руки (PalmLauch), как только аппарат сможет распознать ваше лицо. PalmControl, еще одна эксклюзивная функция Spark, позволяющая вам управлять дроном, перемещая руку перед его датчиком.
Если вы хотите быстро сфотографировать себя в режиме жестов, вам достаточно руками изобразить рамку перед своим лицом. И наоборот, подняв руки вверх и направляя ее к дрону под углом 45 градусов, вы запускаете видеозапись.
У профессиональных дронов DJI нет такой функции, как “Режим жестов”, что вполне логично. Зато начинающие коптероводы и даже опытные операторы-любители очень любят за наличие этой функции, возможно, несколько устаревший на сегодня Spark.
Важность понимания того, как летает и работает квадрокоптер
С небольшим опытом управления полетом, квадрокоптер становится практически автоматическим. Вы перемещаете джойстики на пульте радиоуправления, направляющие дрон в любом направлении, в котором вы хотите, чтобы он летел. Нам не нужно думать о том, что делают двигатели или пропеллеры.
Теперь предположим, что мультикоптер полетел неправильно. Может быть, его тянет в каком-то направлении, и он не зависает на одном месте. Хорошее понимание того, как летает и работает квадрокоптер, поможет вам найти проблему с двигателем или пропеллером, особенно если визуальный осмотр не выявил неисправности.
Когда вы понимаете конструкцию пропеллеров (винтов) квадрокоптера и тягу двигателя, у вас появляется возможность внести изменения в свой дрон. Например, снять камеру и установить что-то другое, например датчик времени полета или лидар. Полеты с дополнительным весом влияют на контроль, полет и баланс беспилотника.
Если вы проектируете или создаете свой собственный квадрокоптер, то понимание конструкции двигателя и винта является важной информацией. Вам нужно подобрать правильную конфигурацию двигателя квадрокоптера, соответствующие пропеллеры, электронные схемы управления скоростью, а также IMU и GPS вместе с соответствующим корпусом.
Объяснение направления вращения двигателя и гребного винта Quadcopter
Используйте автоматические настройки съемки с дрона
Это один из моих лучших советов по съемке с дрона. Это то, чему мне пришлось научиться самому.
Вероятно, ваш дрон имеет некоторые функции автоматической съемки, которые идеально подходят для использования. По каким-то причинам, используя наши дроны и программное обеспечение, мы избегаем функций автоматической съемки, которые производители старательно внедряют в дроны.
- Ракета — ваш самолет зависнет на низкой широкоугольной точке обзора, а затем внезапно выстрелит вверх, как ракета, взлетая в космос, сохраняя при этом направленную вниз камеру.
- Спираль — спираль создает круг вокруг объекта, удерживая его в кадре. По мере того как дрон кружит, он также летит наружу и вверх по спирали.
- Dronie — камера фиксируется на объекте, а затем летит назад и вверх, удерживая объект в кадре. Это делает его идеальным для демонстрации захватывающих дух мест и пейзажей, и вы почти наверняка видели его в кадрах, снятых дронами.
- Круг — дрон держит камеру сфокусированной на объекте и медленно кружит вокруг него, сохраняя постоянное расстояние.
Некоторые из них могут быть немного пошлыми, но другие могут быть идеальным кадром, который вы ищете. Усовершенствованные функции управления и полета могут стать тем, что обеспечит вашим трясущимся кадрам с дрона стабильность и плавность движения, необходимые для создания идеального кадра.
Используйте правильную частоту кадров
Привыкание к ручным настройкам камеры вашего дрона будет одним из лучших способов добиться кинематографической плавности и реалистичного размытия движения. В первую очередь это касается выдержки и частоты кадров. Очень быстрая выдержка не обеспечит равномерного размытия и может привести к рыхлости изображения.
Кроме того, вам необходимо настроить камеру таким образом, чтобы добиться кинематографической плавности движения.
Также необходимо понимать, где будет заканчиваться и публиковаться отснятый материал. Вам нужно подобрать частоту кадров в соответствии с местными условиями — если ваши кадры могут попасть на телевидение. Например, в Соединенных Штатах Америки используется стандарт NTSC, поэтому частота кадров должна быть установлена на 30 или 60.
Если вы транслируете отснятый дроном материал в Англии, Австралии или Африке, то там используется стандарт PAL, при котором частота кадров должна составлять 25 или 50 кадров в секунду. Это также зависит от телевизора или монитора и от того, насколько он соответствует выбранной вами частоте кадров.
Основное эмпирическое правило гласит, что выдержка должна быть в два раза больше частоты кадров.
Если вы обнаружите, что выдержка приводит к переэкспонированному изображению, тогда вам следует инвестировать в фильтры нейтральной плотности, которые не позволят изображению быть переэкспонированным и в то же время позволят соблюсти это простое эмпирическое правило.
Как работает квадрокоптер
Как квадрокоптер зависает или летит в любом направлении, поднимается или опускается в одно мгновение, от прикосновений к ручке пульта дистанционного управления. Дроны способны летать автономно через запрограммированное программное обеспечение для навигации по маршрутным точкам и летать в любом направлении от точки к точке. Давайте рассмотрим используемые технологии в мультикоптерах в подробностях.
Направление вращения пропеллеров наряду со скоростью двигателя дрона, что делает возможным его полет и маневренность. Пульт радиоуправления квадрокоптером отправляет информацию контроллеру на беспилотнике, и передает данные двигателям через их электронные схемы управления скоростью (ESC) о тяге, оборотах, и направлении.
Несмотря на то, что современные технологии беспилотных летательных аппаратов и квадрокоптеров являются современными, они все еще используют старые принципы парного полета, гравитации, действия и реакции.
При изготовлении квадрокоптеров, винтов и конструкции двигателя учитываются основные 4 силы, влияющие на весь полет: вес, подъем, тяга и также являются важными факторами. Математика используется для расчета тяги двигателя квадрокоптера, в то время как аэродинамика самолета используется для расчета винта и движения воздуха над, под и вокруг квадрокоптера.
Комбинируйте движения дрона и камеры
Хорошо, если вы вынесете из этого раздела только один совет, пусть это будет именно он. При создании кинематографических панорамирующих кадров вам следует комбинировать 3 движения (минимум два) для получения идеального кадра. Позвольте мне объяснить, почему…
Когда я только начинал снимать с дрона, я полагался на статичные кадры и кадры с одним движением. Это позволяло создавать потрясающие моменты, но я не был уверен, что у меня все получается! Именно тогда я открыл для себя силу сочетания нескольких движений — и результаты говорили сами за себя.
Самый большой совет, который я могу дать вам, чтобы вы могли максимально использовать съемки с дрона, — это комбинировать три или более движений, чтобы максимально усилить кинематографические ощущения от ваших видео. Под этим я подразумеваю, что у вас есть следующие движения и повороты оси на выбор:
- Рыскание вправо/влево
- Крен вверх/вниз
- Крен вправо/влево
- Дроссель вверх/вниз
- Панорамирование камеры вверх/вниз
- Панорамирование камеры влево вправо (на некоторых моделях)
Что мне нравится делать, так это начинать движение дрона в одном направлении. Затем добавляю другое движение с помощью другого джойстика. Затем я добавляю третье движение с помощью камеры или регулировки джойстика.
Трюк заключается в том, чтобы держать стики и колеса кардана устойчиво, чтобы добиться плавного движения в течение как минимум десяти секунд. Когда вы придете редактировать отснятый материал, у вас будут плавные и достаточно длинные кадры, которые вы сможете ускорить, если понадобится!
Навигация квадрокоптера с использованием монокулярного зрения
Сейчас для многих компьютерное зрение не является тайной за семью замками. Однако новые алгоритмы и подходы не перестают впечатлять. Одним из таких направлений является монокулярное зрение, в особенности SLAM. О том, как мы решали задачу навигации квадрокоптера, оснащенного единственной камерой, и пойдет речь в этой статье.
Задача
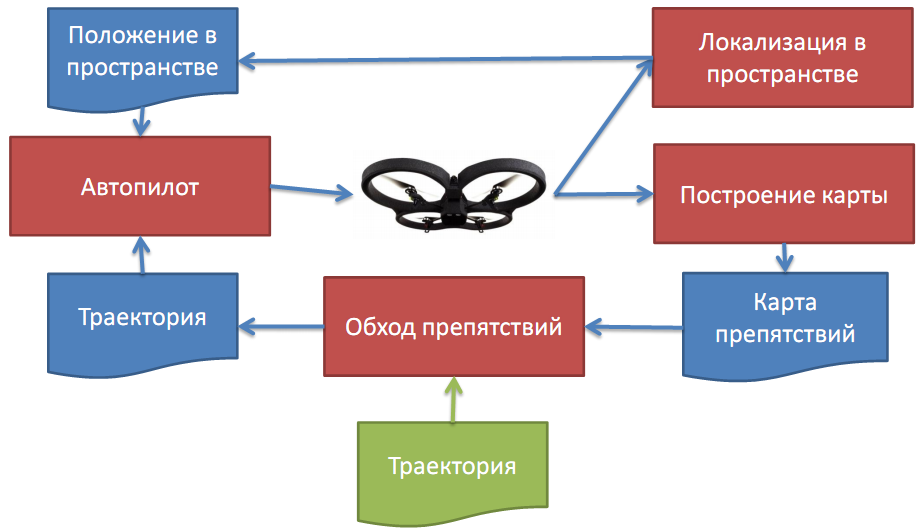
Задача заключается в движении по траектории, заданной последовательностью положений, в изначально неизвестном окружении с возможными препятствиями. Для её решения необходимо уметь:
- Строить карту препятствий
- Определять положение квадрокоптера относительно траектории и препятствий
- Корректировать траекторию с учетом облета препятствий
- Рассчитывать управляющие сигналы – реализовать контроллер
Технической базой является Parrot AR.Drone. AR.Drone снабжен следующими интересующими нас устройствами:
- Фронтальная камера: 640х360, 30 fps, диагональный угол обзора 92 градуса
- Нижняя камера: используется встроенным автопилотом для компенсации ветра и дрифта вообще
- Ультразвуковой датчик высоты: работает в пределах 0.25 – 3 м
- ИНС (акселерометр гироскоп магнетометр) барометр: все датчики интегрированы в единую систему при помощи (видимо) sensor fusion
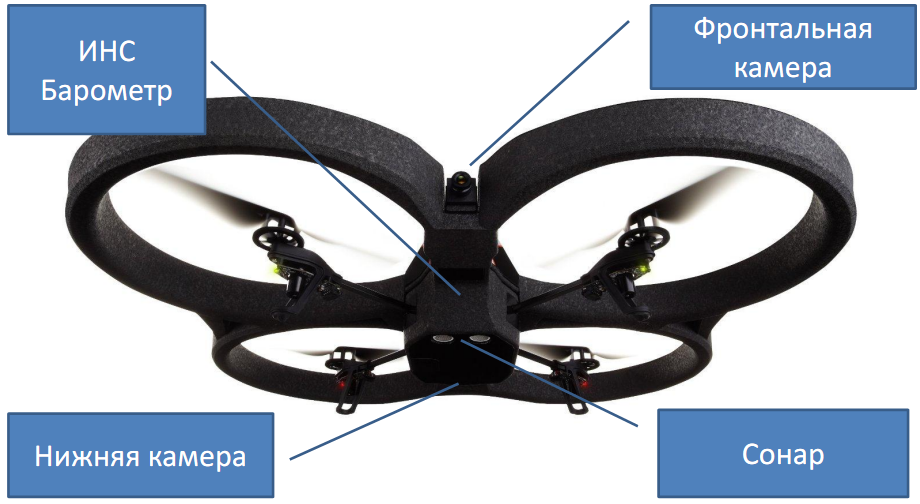
Кроме того, на основе показаний ИНС и нижней камеры формируется единая одометрия.
Итак, для построения карты окружения при помощи штатных средств AR.Drone мы можем использовать по большому счету только фронтальную камеру. Это непосредственно приводит нас к задаче монокулярного зрения, а именно к монокулярному SLAM.
Large Scale Direct SLAM
Можно смело сказать, что SLAM при помощи единственной камеры – писк современных технологий. Такие алгоритмы, появившиеся в последние несколько лет, можно пересчитать по пальцам руки неосторожного фрезеровщика – это ORB SLAM, LSD (Large Scale Direct) SLAM (и его предшественник SVO (Semi-direct Visual Odometry)), PTAM (Parallel Tracking And Mapping). Еще меньше алгоритмов, строящих более-менее плотные (semi-dense) карты окружения. Из наиболее продвинутых алгоритмов такие карты выдает лишь LSD SLAM:
В двух словах, LSD SLAM работает следующим образом. Параллельно работают три процедуры: трекинг, построение карты и оптимизация карты. Компонент трекинга оценивает положение каждого нового кадра относительно текущего ключевого кадра. Компонент построения карты обрабатывает кадры с известным положением, либо производя очистку карты кадра хитрым способом, либо создавая новый ключевой кадр. Компонент оптимизации карты занимается поиском циклов в графе ключевых кадров и устранением эффекта плавающего масштаба. Более подробно ознакомиться с алгоритмом можно в статье разработчиков.
Для стабильной и эффективной работы алгоритма (эти требования применимы к любому алгоритму монокулярного SLAM) необходимо следующее:
- Максимально более точная калибровка камеры и последующая ректификация изображения. Точность калибровки и ректификации, а также используемой модели искажений напрямую влияет на качество получаемых карт.
- Широкий угол обзора камеры. Для более-менее надежной работы нужны камеры с FOV более 80-90 градусов.
- Достаточное количество кадров секунду. При FOV в 90 градусов количество кадров в секунду не должно быть меньше 30 (лучше – больше).
- Движения камеры не должны содержать повороты без переноса. Такое движение ломает алгоритм.
Пункты 2 и 3 связаны друг с другом простым соображением: для расчета перемещения между двумя соседними кадрами изображения на этих кадрах должны перекрываться в достаточной степени. Соответственно, чем быстрее перемещается камера, тем больше должны быть угол обзора или частота кадров, чтобы связь между кадрами не потерялась.
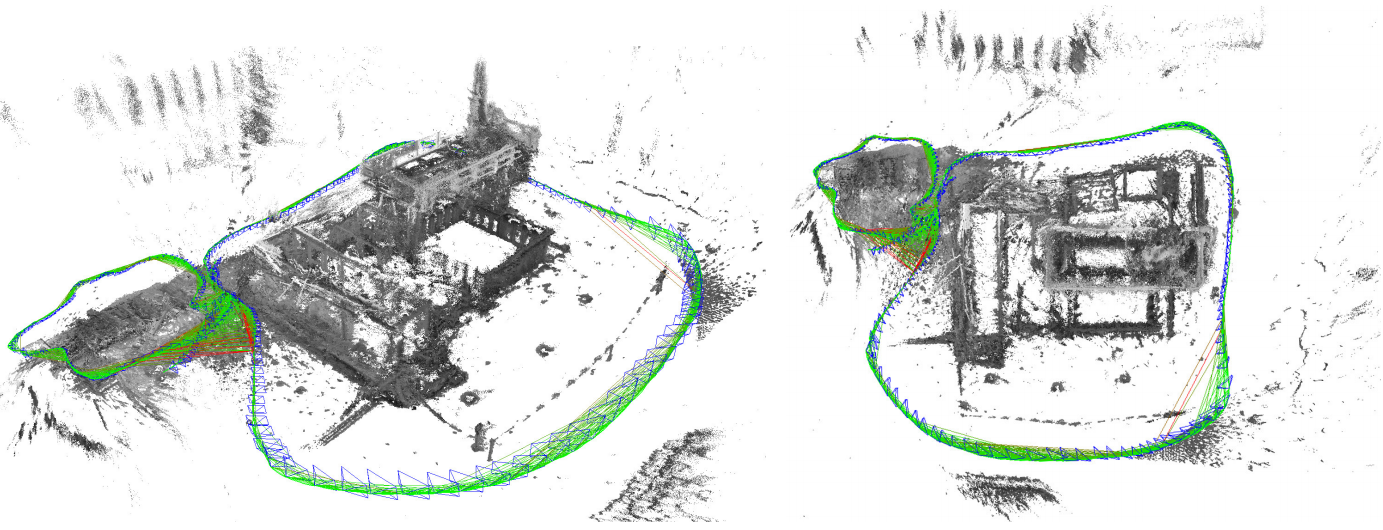
При соблюдении этих требований можно получить карты весьма неплохого качества, в чем можно убедиться, посмотрев видео от создателей LSD SLAM:
Впечатляет, не правда ли? Однако даже если Вы достигли такого качества карт, Вас ждет еще одна неприятность: ни один алгоритм монокулярного SLAM принципиально не может оценить абсолютного масштаба полученных карт и, следовательно, локализации. Поэтому необходимо прибегнуть к некоторым хитростям и найти внешний источник данных либо помогающий определить размер объектов карты, либо оценивающий абсолютные значения перемещений камеры. Первый способ ограничен только Вашей фантазией: можно поместить объект известного размера в поле зрения камеры и затем сравнивать его с масштабами похожих частей карты, можно проводить инициализацию алгоритма в заранее известной обстановке, и так далее. Второй способ довольно легко применить, используя, например, данные альтиметра, что мы и проделали.
Для оценки масштаба мы использовали данные о перемещениях по вертикальной оси, полученных из двух источников: от алгоритма LSD SLAM и альтиметра AR.Drone. Отношение этих значений и есть масштаб карты и локализации монокулярной системы. Для устранения случайных возмущений полученное значение масштаба мы отфильтровали фильтром низких частот.
Обход препятствий и корректировка траектории
LSD SLAM хранит карту окружения в виде графа ключевых кадров с привязанными к ним частичными картами глубины. Объединяя все узлы графа, получаем карту известной части окружения в виде облака точек. Однако это еще не карта препятствий! Чтобы получить плотную (dense) карту препятствий, мы воспользовались библиотекой Octomap, строящей карту препятствий в виде октодерева на основе облака точек.
Для проверки столкновений и корректировки траектории мы использовали стек библиотек FCL (Flexible Collision Library) OMPL (Open Motion Planning Library). После обновления карты запускается проверка столкновения траектории с препятствиями, в случае обнаружения столкновений сегмент траектории пересчитывается планировщиком (мы использовали BIT*, но здесь могут быть варианты).
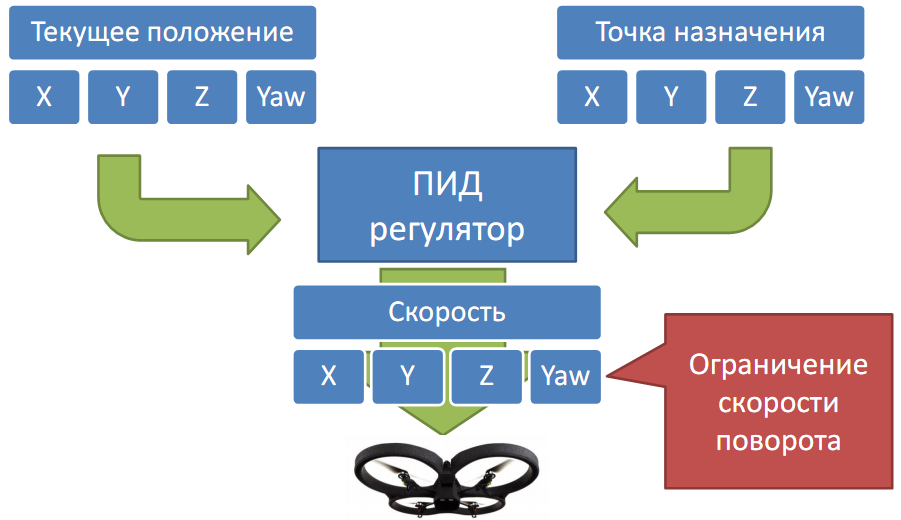
Контроллер
Контроллер оказался в итоге довольно простым, на основе ПИД-регулятора. Этого оказалось достаточно для следования по траектории. Единственное, что пришлось добавить – ограничение скорости поворота камеры для сохранения стабильности SLAM.
Платформа и общая схема решения
В качестве платформы всего решения мы использовали ROS. Платформа предлагает всю необходимую инфраструктуру для быстрой разработки параллельно работающих компонент (узлов в терминологии ROS), коммуникаций между ними, мониторинга, динамической настройки, отличный симулятор Gazebo и многое другое, облегчающее разработку серьезных робототехнических решений. Хотя стабильность отдельных компонент системы все же оставляет желать лучшего, и использовать её в продакшне ответственного проекта пока не стоит.
Общая схема решения получилась примерно такой:
Выводы
Бочка меда:
Ложка дегтя:
Ссылки:
Страница LSD SLAM на сайте разработчиков: vision.in.tum.de/research/vslam/lsdslam
Open Motion Planning Library: ompl.kavrakilab.org
Flexible Collision Library: github.com/flexible-collision-library/fcl
Octomap: octomap.github.io
Направление двигателя для рыскания
На квадрокоптере, таком как DJI Mavic Pro или последняя версия Mavic 2 Pro, рыскание управляется правой ручкой управления на пульте дистанционного радиоуправления. Перемещение джойстика влево или вправо приведет к повороту квадрокоптера влево или вправо.
Движение на пульте передают сигналы на полетный контроллер, который отправляет данные на регуляторы скорости квадрокоптера, управляющие конфигурацией и скоростью каждого двигателя.
Чтобы увидеть, как это на самом деле работает, взгляните на диаграмму конфигурации пропеллеров выше. На схеме изображен квадрокоптер DJI Phantom 3, вид сверху с роторами, обозначенными от 1 до 4.На приведенной схеме, вы можете видеть конфигурацию двигателя квадрокоптера:
Угловой момент является вращательным эквивалентом линейного импульса и рассчитывается путем умножения угловой скорости на момент инерции. Какой момент инерции? Это похоже на массу, но только он имеет дело с вращением. Угловой момент зависит от того, как быстро вращаются роторы.
Концептуально момент инерции можно рассматривать как представление сопротивления объекта изменению угловой скорости.
Если на двигателях квадрокоптера крутящий момент отсутствует, то общий угловой момент должен оставаться постоянным, равным нулю. Чтобы понять угловое движение вышеуказанного квадрокоптера, представьте, что 2-й и 4-й ротор, имеют положительный угловой момент, а 1-й и 3-й имеют отрицательный угловой момент. Назначим каждому двигателю значение -4, 4, -4, 4, что в сумме равно нулю.
Чтобы повернуть дрон вправо, нужно уменьшить угловую скорость двигателя 1, чтобы иметь угловой момент -2 вместо -4. Если бы ничего не случилось, общий момент импульса квадрокоптера теперь был бы 2. Так вот, этого не может быть. Дрон теперь будет вращаться по часовой стрелке, так что его корпус имеет момент импульса -2.
Уменьшение вращения ротора 1 действительно привело к вращению дрона, но также вызывает проблему. Это также уменьшило тягу от двигателя 1. Теперь направленная вверх сила не равна силе гравитации, и квадрокоптер опускается.
Кроме того, тяга двигателя квадрокоптера не одинакова, поэтому квадрокоптер становится неуравновешенным. Квадрокоптер наклонится вниз в направлении двигателя 1.
Чтобы вращать дрон без создания вышеуказанных дисбалансов, необходимо уменьшить вращение двигателей 1 и 3 с увеличением вращения вращающихся роторов 2 и 4.
Угловой момент вращения роторов по-прежнему не равен нулю, поэтому корпус дрона должен вращаться. Однако общая сила остается равной силе гравитации, и дрон продолжает зависать. Поскольку нижние упорные роторы расположены по диагонали друг от друга, дрон может оставаться в равновесии.
Направление пропеллеров – рыскание, тангаж, крен
Прежде чем углубиться в настройку двигателя и пропеллеров квадрокоптера, давайте немного объясним терминологию, используемую, когда он летит вперед, назад, вбок или вращается при зависании.
Рыскание (Yaw)— это вращение или поворот квадрокоптера вправо или влево. Это основное движение для вращения мультикоптера. На большинстве дронов это достигается с помощью левой ручки газа влево или вправо.
Тангаж (Pitch)— это движение квадрокоптера вперед или назад. Подача вперед обычно достигается нажатием ручки газа вперед, что заставляет квадрокоптер наклоняться и двигаться вперед от вас. Шаг назад достигается перемещением ручки газа назад.
Крен (Roll)- Большинство людей путают крен с рысканием. Крен заставляет квадрокоптер лететь вбок, влево или вправо. Он управляется правой ручкой газа, заставляя его летать слева направо.
Большинство высокотехнологичных дронов, таких как квадрокоптер Yuneec Q500 4k, позволяют управлять им двумя различными способами. Вы можете летать на дроне, как будто вы пилот и на самом деле в квадрокоптере. Вы управляете ручками по-разному относительно крена, в зависимости от того, приближается ли дрон к вам или улетает от вас.
Вот короткое видео, которое очень просто показывает вам, каковы движения крена, тангажа и рыскания.
Направление пропеллеров для вертикального подъем
Вертикальный подъем зависит от направления вращения пропеллеров. Для того чтобы дрон поднялся в воздух, необходимо создать подъемную силу, равной силе гравитации или превышающей ее. Это основная идея взлета самолетов, которая сводится к контролю восходящей и нисходящей силы.
Квадрокоптеры используют конструкцию двигателя и направление вращения винта для создания требуемой тяги, чтобы управлять силой тяжести, воздействующей на летательный аппарат.
Вращение винтов приводит к вытеснению воздуха. Все силы приходят парами (Третий Закон Ньютона), что означает, для каждой силы действия существует равная (по размеру) и противоположная (по направлению) сила противодействия. Поэтому, когда ротор толкает воздух вниз, воздух толкает ротор вверх. Чем быстрее вращаются роторы, тем больше подъемная сила и наоборот.
Дрон может делать три вещи в вертикальной плоскости: зависать, подниматься или опускаться.
Зависание на месте – для зависания, тяга четырех роторов толкает дрон вверх и должна быть точно равна силе гравитации, притягивающей его вниз.
Подъем вверх – достигается путем увеличения тяги (скорости) четырех роторов квадрокоптера так, чтобы сила, направленная вверх, была больше веса и силы тяжести.
Вертикальный спуск или падение вниз – требует выполнения полной противоположности подъему. Уменьшается тяга, чтобы сила была направлена вниз.
Правый стик управления
Правый стик отвечает за направление и движение дрона. Перемещение правого стика вверх обеспечит дрону прямолинейное движение вперёд, перемещение стика вниз — прямолинейное движение назад, а перемещение стика влево и вправо обеспечит коптеру прямолинейное движение влево и вправо соответственно.
Помимо стиков управления на пульте будут располагаться несколько кнопок, обеспечивающих управление камерой. Эти кнопки позволяют делать фотографии, начинать/останавливать запись видео, наклонять или поворачивать камеру, а также открывают доступ к меню. Соответственно перед полётом будет полезно изучить, назначение каждой кнопки.
В целом, принцип управления дроном достаточно интуитивный и простой процесс. Кстати вам как пилоту сразу нужно приучить себя правильно определять, какая сторона дрона является передней, чтобы понимать, в каком направлении двигаться вперед, а в каком назад.
На первых этапах обучения для обеспечения дополнительной безопасности запускайте дрон исключительно в GPS режиме (в режиме спутникового позиционирования), который позволяет ему стабильно сохранять своё положение даже если вы отпустите стики управления, а также это будет особенно актуально в тех случаях, когда связь с дроном прервётся.
Простота и глупость
Во время полета на дроне может возникнуть желание изменить мир беспилотного кинематографа. Дело в том, что основы кинематографии и кадрирование кадра так же верны для съемок с дрона, как и для создания наземного контента. Если по какой-то причине вы не получаете нужных вам кадров, почти наверняка есть основополагающие правила кинематографии, которые вы можете улучшить. К ним относятся:
- свет — солнце является одним из лучших источников света для видео. Это делает его идеальным для съемок с дрона. Если вы снимаете при естественном освещении, вам следует приложить все усилия, чтобы получить кадры утром и вечером, когда солнечный свет немного мягче. Камера может работать только при том свете, который попадает в объектив — убедитесь, что в объекте съемки его достаточно.
- Правило третей — каждый, кто хоть как-то связан с кинематографом, знает о правиле третей, однако, используя его как процедуру, люди забывают об этом. Когда вы выстраиваете кадр, помните о правиле третей и не поддавайтесь искушению попробовать что-то «особенное», так как это может вызвать ненужные проблемы с кадрированием, когда вы придете редактировать отснятый материал.
- При монтаже не переусердствуйте с переходами — каждый видеоредактор поставляется с различными переходами. Переходы — это отличный способ перевести зрителя с одного кадра на другой, но будьте проще. Просто используйте простые прыжковые сокращения, затухания или простые салфетки, чтобы скрыть переходы. Чем больше внимания вы привлекаете к своим переходам и монтажу, тем более дешевыми и любительскими будут выглядеть ваши съемки с дрона и итоговое видео. Это противоположно тому, чего вы хотите добиться.
Сохраняйте плавность
Один из способов убедиться в том, что ваши кадры максимально кинематографичны, — это подумать о плавности каждого аспекта съемок с дрона. Плавность, о которой я говорю, относится к:
- полет дрона — дроны оснащены множеством действительно причудливых электронных механизмов и механизмов обратной связи, которые поддерживают их относительно стабильное положение в воздухе. Однако иногда под воздействием внешних факторов дрон летит не так плавно, как хотелось бы. В этом случае я бы перезаписал кадр. Не стоит также слишком резко или неточно управлять джойстиками. Вы можете запрограммировать реакцию дрона на джойстик в приложении DJI GO4, если обнаружите, что дрон движется слишком быстро или нестабильно, когда вы перемещаете джойстики.
- Камберный кардан — кардан — это то, что перемещает камеру. Чтобы обеспечить кинематографическое ощущение от отснятого дроном материала, вы должны перемещать кардан и камеру очень плавно. Потребуется немного практики, чтобы понять, как именно кардан реагирует на управление джойстиком, и это также можно откалибровать в приложении.
- Настройки ISO — если вы используете автоматическую настройку iso, дрон будет выбирать ее на основе экспозиции и количества света в текущей среде, что может привести к быстрым изменениям экспозиции и яркости. Не используйте автосенсинг, установите ISO и цветовой баланс, и дрон останется привязанным к ним, а не будет менять их по мере полета.
Как я уже говорил, кинематографические кадры отличаются плавностью и продуманностью — вам нужно убедиться, что полет вашего дрона обеспечивает эти две важные характеристики кинематографических кадров.
Учимся управлять квадрокоптером быстро, безопасно и бюджетно
Фактор редактирования полос ошибок
В то время как вы управляете дроном, снимая кадры, может возникнуть соблазн быстро перейти от одного запланированного кадра к другому. На самом деле, когда я летал на дроне и снимал только то, что мне «нужно», я всегда жалел, что не снимал дольше, когда находился на стадии постпродакшна.
Я люблю пролететь мимо объекта съемки еще как минимум пять секунд, прежде чем съемка будет считаться завершенной. Если это простое неподвижное панорамирование, я повторяю движение несколько раз и увеличиваю продолжительность съемки как минимум на 10 секунд.
Эти большие погрешности на необработанных кадрах означают, что когда дело дойдет до редактирования, вам будет с чем поиграть. Я также обнаружил, что иногда лучшие фрагменты кадра получаются после того, как я нажимаю «стоп» на записи. Например, это могут быть птицы, пролетающие над сценой, что всегда заставляет ее выглядеть очень круто.
Убедитесь, что вы отсняли гораздо больше материала, чем вам нужно, — это важный шаг, который позволит вам получить впечатляющие кадры и вывести ваше видео на новый уровень.


