

- 2 Оптимальное управление
- 4 Регулятор ориентации коптера
- 5 Регулятор положения коптера в пространстве
- Cheerson cx-23
- Dji mavic air fly more combo
- Dji mavic pro platinum
- Dji phantom 4 pro
- Syma x5uw
- Typhoon h pro-rs realsense
- Xiaomi mi drone 4k
- Калибровка простых моделей квадрокоптеров
- Если не получается…
- Как пожелание…
- Квадрокоптеры dji — история успеха дронов
- Размеры квадрокоптеров, как правильно выбрать
- Разновидности квадрокоптеров
2 Оптимальное управление
С точки зрения управления коптер представляет собой не самую простую конструкцию – мы имеем 8 двигателей, которыми можно управлять индивидуально, но практически каждый из них влияет на все 12 из переменных состояния (фазовых координат) коптера. То есть, если мы будем «рулить» одним из двигателей – менять его обороты в большую или меньшую сторону, это будет оказывать воздействие на каждую из координат x, y, z и на каждую из трёх угловых скоростей.
Кроме случаев, когда вектор тяги параллелен какой-либо из координатных плоскостей системы B – тогда на 4 из 12 переменных состояния данная сила тяги воздействовать не будет. И, если бы мы делали всё методами классической теории управления, то можно было бы записать 8х12 = 96 передаточных функций между 8 входными воздействиями и 12 выходными (переменными состояния) коптера.
Также, изменение оборотов (частоты вращения) двигателей приводит к нелинейному (а к квадратичному) изменению силы тяги. В проектировании регуляторов коптера это предполагается как аксиома, и она довольно хорошо согласуется с экспериментальными данными.
Задача оптимального управления заключается в том, чтобы перевести коптер из точки А в точку Б с минимальным перерегулированием, по оптимальной (как правило кратчайшей) траектории и за минимальное время. При этом налагаются ограничения на максимальную скорость, ускорения и углы наклона коптера (отклонение от горизонтальности).
Проблема заключается в том, что в «прямую» сторону можно довольно несложно посчитать – как воздействует каждый из двигателей (8 переменных – 8 частот вращения) на каждую из 12 переменных состояния. А если учитывать еще и ускорения, то на каждую из 18 переменных.
Если не сильно вдаваться в теоретические дебри теории оптимального управления и нелинейного программирования, такую задачу можно свести и решить методом множителей Лагранжа, а точнее – условиями и методом Каруша-Куна-Такера, где ограничения, накладываемые на переменные, представляют собой неравенства.
Чтобы упростить изложение, приведем краткий ход решения задачи. Для начала запишем матрицу Г размерностью 6х8 – по количеству каналов управления (6) и количеству ВМГ (8), которая будет отображать как именно каждый из двигателей влияет на каждый из каналов управления:
Где: fi|x,y,z – это коэффициент перед 

 Рисунок 16. Структура регулятораМетодами теории оптимального управления (подробнее см. [1, раздел 4.1.1]) задача решается поиском так называемой обратной псевдоинверсной матрицы
Рисунок 16. Структура регулятораМетодами теории оптимального управления (подробнее см. [1, раздел 4.1.1]) задача решается поиском так называемой обратной псевдоинверсной матрицы 

На практике, для заданной геометрии коптера и полученных 48 чисел в матрице Г, получаем другие 48 чисел, которые определяют правило управления (микширования) двигателей, при поступлении той или иной команды по какому-либо каналу управления. На рисунке 16 представлена общая схема построения регулятора.
Задатчик положения вырабатывает нужные координаты, в которые требуется привести коптер. Они сравниваются по какому-то алгоритму с измеренными координатами и управляющий алгоритм вырабатывает 6 управляющих воздействий, по каждому из каналов управления.
На основе посчитанной псевдообратной матрицы 
Управляющие команды по каждому из каналов управления формируются как рассогласование между заданной координатой (углом) и текущей, измеренной координатой. Это в самом простом варианте. В более сложном управляющий алгоритм должен иметь в своём составе алгоритм приоритетности стабилизации положения коптера над алгоритмом перемещения в пространстве.
Дело в том, что по каждому из каналов есть запас (располагаемая у ВМГ возможность) управления. И, если (например) мы сделаем приоритетным перемещение по оси х то при большом рассогласовании между текущей координатой x и заданной регулятор будет стремиться наклонить всё больше и больше коптер вокруг оси y, и при определенном наклоне уже не хватит возможностей двигателей обеспечивать стабилизацию коптера и регулирование высоты полёта.
Для коптера с конкретными параметрами двигателей, винтов, массы и размеров это всё можно вычислить и наложить нужные ограничения на управляющие воздействия ui(t), а также их приоритет. Но это выходит за рамки данной статьи, где мы делаем модель в общем виде.
Выпишем аналитические выражения для элементов первых двух столбцов матрицы Г в случае рассматриваемого октокоптера (без реактивного момента ВМГ и без прецессии!):
Видно, что первая ВМГ (ось силы тяги которой параллельна плоскости yz) не создаёт никакой силы вдоль оси x и никакого момента вокруг оси x (т.к. пересекает её). Поэтому при управлении по оси x или для создания вращательного момента вокруг оси x первый двигатель «бесполезен».
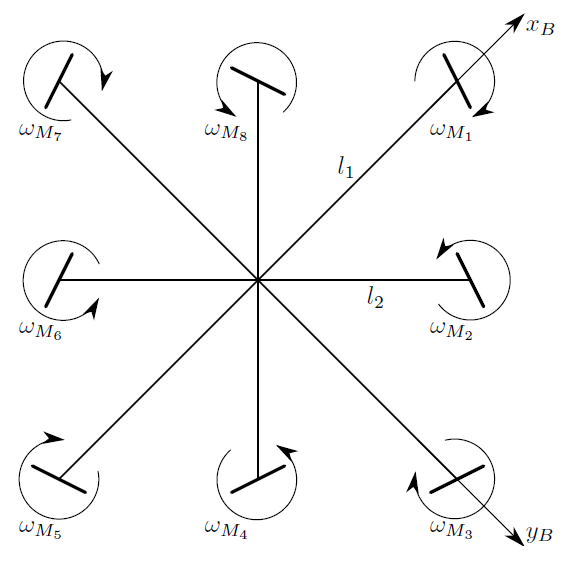

Третья колонка – управление по оси z, имеет отрицательные числа т.к. ось z направлена вниз, а вектора силы тяги ВМГ – вверх. Обратим внимание, что абсолютные значения чисел третьей колонки гораздо меньше, чем первой и второй и все имеют один и тот же знак.
Это означает что коптер имеет гораздо лучшую управляемость по вертикальной оси, что очевидно, т.к. все ВМГ как раз и работают практически в эту сторону (а не влево-вправо-вперёд-назад). Четвёртая колонка и пятая – это управляемость коптера по крену и тангажу, последняя шестая – по курсу.
Видно, что по курсу коптер гораздо слабее управляем, чем по крену и тангажу. Но для наших целей, и для целей настоящей обучающей статьи, этого было достаточно. Подбором направлений сил тяги ВМГ (и перевычислением матриц для новой геометрии) можно этот баланс менять.
Обратим также внимание на то, что теоретически – при вычисленном и приведенном здесь количественно микшировании двигателей, достигается только управление по выбранному каналу, без влияния на другие каналы управления. Т.е. при выбранном расположении ВМГ у октокоптера, в некоторых малых пределах можно изменять направление вектора тяги, без создания поворотных моментов т.е. не наклоняя сам коптер, и он будет горизонтально лететь и управляться без наклонов. Но только в очень узком диапазоне скоростей и внешних возмущений.
Общая структура регулятора приведена на рисунках 17 и 18.
Рисунок 17. Общая схема регулятораРисунок 18. Схема каналов регулятораВ самом простейшем случае — на 6 входов регулятора поступают заданные фазовые координаты, они сравниваются с текущими (измеренными) и в общем случае в соответствии с матрицей
4 Регулятор ориентации коптера
Углы φ крена и θ тангажа являются одними из самых важных для коптера т.к. отвечают за стабилизацию его положения в пространстве, и должны иметь самый высший приоритет среди других каналов управления. Поскольку коптер симметричен, то регуляторы с точностью до осей симметрии похожи друг на друга.
В стабильном состоянии по каждой из осей 
 Рисунок 19. Регулятор кренаРисунок 20. Коэффициенты блока типа «Размножитель» в регуляторе крена
Рисунок 19. Регулятор кренаРисунок 20. Коэффициенты блока типа «Размножитель» в регуляторе крена
Аналогично выполнен и регулятор по каналу тангажа (представлен на рисунке 21).
Рисунок 21. Регулятор тангажаРисунок 22. Коэффициенты блока типа «Размножитель» в регуляторе тангажа
Конкретные значения на линиях регулятора, пропорциональных углу, угловой скорости и угловому ускорению (моменту сил) подбираются численным экспериментом для данного коптера (с конкретными массой, моментами инерции по осям, двигателями, размером рамы и т.д.).
5 Регулятор положения коптера в пространстве
Итого, регулятор ориентации коптера и регулятор высоты, работая совместно, обеспечивают «висение» коптера в определённой точке пространства в состоянии динамического равновесия. При этом, у коптера еще остается некоторый запас управляемости, который позволяет ему двигаться целенаправленно вдоль координатных осей. Но данные регуляторы несколько сложнее чем регулятор ориентации.
Во-первых, они работают в системе координат В, а в общем случае коптер вращается в пространстве (по курсу) и направления осей x и y системы В не совпадают с такими же осями в системе I. Поэтому рассогласование его позиции в системе I надо переводить в систему В и дополнительно подготавливать задание на регулятор положения по осям x и y.
Во-вторых, рассогласование в этом регуляторе может быть как небольшим, так и значительным, а обычный ПИД-регулятор, как правило, не может одинаково эффективно работать с малыми и с большими отклонениями, требуется доработка регулятора – например, переключение регулятора положения в режим поддержания постоянной скорости при каких-то условиях.
В-третьих, у классического коптера с винтами, расположенными в одной плоскости и параллельными силами тяги, направленными вверх, практически нет возможности создавать боковую силу тяги – т.е. по существу, коптер является неуправляемым по осям X и Y. В нашем варианте, когда винты довернуты еще на 3 градуса вокруг своих лучей, у них появляется небольшая сила тяги направленная в стороны, и микшированием двигателей можно создавать боковую силу тяги. Однако, она очень несущественна, почти нулевая – об этом свидетельствуют большие числа в 1 и 2 колонках матрицы 2). С точки зрения управления, это слишком большая величина. Поэтому коптеры управляются по направлениям X и Y при помощи других каналов управления – поворачиваясь вокруг осей X и Y (об этом напишем дальше).Но структурно – если делать регулятор по каналам Х и Y типовым образом, регулятор может быть выполнен аналогично регуляторам ориентации – на выходе формируется управляющее воздействие по каналу X (Y) и домножается на вектор – 1 (или 2) колонку матрицы
Один из вариантов регулятора по каналу X и Y представлены на рисунке 23 и 24.
Рисунок 23. Регулятор по каналу ХРисунок 24. Регулятор по каналу Y
Регуляторы двухрежимные, при отклонении от заданной позиции более чем на 5 метров, переключаются в режим работы «V» и поддерживают скорость по направлению на уровне REGX_OGRV (или REGY_OGRV) м/с. При этом, интегрирующая ветка регулятора отключается. При переходе в режим позиции, интегрирующая ветка включается в работу с некоторой задержкой – чтобы коптер успел подлететь к заданной точке и не набралась существенная величина на интеграторе за время «подлета».
Но, отметим еще раз – такой подход будет справедлив и оправдан при существенной управляемости коптера по горизонтальным осям, что может быть достигнуто относительно большим наклоном винтов от вертикальной оси.
Приведенные здесь регуляторы, хотя и кажутся сложными на первый взгляд, являются только лишь базовыми версиями, которые позволяют управлять коптерами. Дальнейшая разработка модели может (и должна) привести к более сложным регуляторам и к повышению качества переходных процессов.
В сумме, на выходе всех 6 каналов управления (по курсу регулятор во многом аналогичен регуляторам ориентации и для сокращения материала не приводим его здесь) мы имеем по каналу регулятора высоты некоторую «базовую» желаемую частоту вращения для каждой из 8 ВМГ, и некоторую «добавку», сформированную остальными 5-ю каналами управления.
Единственный нюанс – микшированные добавки, т.к. это не прямая добавка к частоте вращения, а добавка к квадрату частоты вращения, и для того чтобы вычислить добавку именно к частоте вращения, надо еще дополнительно проделать несложные математические вычисления, см. рисунок 25:
Рисунок 25. Суммирование каналов управления
Сложность вычисления в том, что добавка частоты вращения зависит и от нужного квадрата добавки, и от самой базовой частоты вращения – и чтобы вычислить итоговую частоту вращения как сумму базовой и добавки надо предварительно сделать еще ряд вычислений:
где квадраты скоростей – это сигналы, выходы каналов управления.
Таким образом, в зависимости от текущего уровня «базовой» частоты вращения (которая определяется в основном массой коптера и, возможно, груза и получается на выходе из регулятора высоты), определяется нужная «добавка» угловой скорости для каждой из ВМГ, суммируется с базовой частотой вращения и отправляется как задатчик на регулятор двигателя каждой из ВМГ.
Cheerson cx-23
- Дальность полета: 500 м
- Продолжительность полета: 14 мин
- Функция FPV: есть
Один из самых дорогих квадрокоптеров среди тех, что оснащены камерой, умеющей снимать лишь HD-видео. За дрон просят 15000 рублей или даже чуть больше, если требуется более наполненная комплектация. В отличие от ранних моделей от этого производителя, устройство получилось более компактным, а в его состав вошли бесщёточные моторы.
В отличие от большинства квадрокоптеров с HD-камерой, пульт у Cheerson CX-23 обладает двумя антеннами и сегментным дисплеем, на который выводится телеметрия — удаленность дрона, его высота и некоторые другие параметры. Также к этому пульту крепится сравнительно небольшой монитор. Он нужен для того, чтобы видеть всё, что попадает в поле зрения встроенной камеры.
Как уже говорилось выше, коптер снимает картинку только в разрешении 720p. Но делает он это достаточно неплохо. Изображение получается достаточно детализированным, оно лишь немного не дотягивает до того, на что способны современные смартфоны. Однако картинку всё же потряхивает, и это несмотря на использующиеся здесь бесколлекторные моторы.
Квадрокоптер получился достаточно быстрым, максимальная его скорость составляет 15 м/с. Потерять его достаточно сложно. Дело в том, что здесь присутствует GPS-чип, который буквально заставляет устройство вернуться на место взлета, если сигнал с пульта потерян. Это же случится и в том случае, если заряд аккумулятора начнет подходить к концу.
Каких-то очень умных функций у этого дрона нет. Он умеет летать вокруг заданной точки, снимая её, но и даже с этой задачей изделие справляется не лучшим образом. Впрочем, рассчитывать на что-то такое при покупке достаточно недорогого квадрокоптера бессмысленно.
Если вы желаете вплотную заняться качественной видеосъемкой, то лучше подумать над покупкой какого-нибудь дрона с 4K-камерой. Или же хотя бы приобрести DJI Spark, летающий не очень долго, но зато умеющий снимать великолепную картинку в разрешении Full HD.
Dji mavic air fly more combo
- Продолжительность полета: 21 мин
- Дальность полета: 2000 м
- Примерная стоимость: 67 000 руб.
Ещё один складной квадрокоптер от DJI. Этот дрон существует как минимум в трех цветовых вариантах. Управлять им можно как при помощи пульта, так и со смартфона. Однако дальность действия Wi-Fi не превышает 80 м, поэтому мобильное устройство будет сильно ограничивать коптер.
Как и другие дроны китайской компании, изделие обладает умной электроникой. Дрону не составляет труда держать в кадре конкретного человека или автомобиль. При этом коптер ведет съемку с разных ракурсов, летая вокруг объекта или даже взмывая над ним высоко в воздух.
В качестве камеры здесь используется модуль с разрешением 12 Мп. Его возможностей хватает на съемку 4K-видео с частотой 30 кадров/с. Также покупатель должен по достоинству оценить 32-мегапиксельные панорамы, для создания которых DJI Mavic Air делает 25 снимков окружающей местности, справляясь с этой задачей всего за 8 секунд.
Смазанных деталей нет ни на фотографиях, ни в видео — положение камеры успешно стабилизируется трёхосевым подвесом, пусть и достаточно небольшим. Интересно, что квадрокоптер DJI Mavic Air дополнен встроенной памятью объемом 8 Гб. То есть, если собираетесь заниматься лишь фотографированием, то можно обойтись и без установки карты памяти.
Пульт для данного дрона тоже имеет складную конструкцию. Это позволяет легко разместить набор из квадрокоптера и пульта в маленьком рюкзаке. А в чём её отличия от Mavic Pro, имеющего примерно те же особенности? Во-первых, устройство стоит заметно дешевле (особенно если сравнивать версии с тремя аккумуляторами).
Во-вторых, время полета здесь не столь велико — посадка происходит спустя 21 минуту. В-третьих, дальность полета тоже имеет некоторые ограничения (в основном именно из-за низкой ёмкости аккумулятора). В остальном же дрон обязательно должен понравиться покупателю.
Dji mavic pro platinum
Рассмотренные выше дроны имеют одну неприятную особенность — они имеют крупные размеры. Добраться до точки старта с таким девайсом проще всего на автомобиле. Если же у вас нет личного транспорта, то придется запастись специальным рюкзаком. Но можно ли купить хороший квадрокоптер с камерой, имеющий миниатюрные размеры? Да, DJI Mavic Pro Platinum удивляет именно своими габаритами.
Нельзя сказать, что этот дрон совсем маленький. Проще всего его сравнить с внешним аккумулятором емкостью, допустим, 10000 мАч. У устройства складываются стойки с пропеллерами, благодаря чему дрон легко можно кинуть в карман куртки — там с ним ничего не случится.
При этом от продвинутого «фантома» девайс отличается только меньшим количеством оптических и ультразвуковых датчиков. То есть, если квадрокоптер полетит влево или назад — нужно убедиться, что там нет препятствий. А вот происходящее спереди устройство различает исправно.
Данным дроном можно управлять со смартфона, делая фотографии себя любимого. Но телефон является серьезным ограничением, ведь сигнал Wi-Fi даже на открытом пространстве пробивается не слишком далеко. Поэтому лучше взять в руки пульт, отпустив малыша на волю.
В это сложно поверить, но такой миниатюрный дрон может улететь на четырехкилометровое расстояние! Процесс полета записывается в 4K-разрешении. Однако если вам требуется высокая частота, то лучше снизить этот параметр до Full HD. Приятно, что положение камеры можно менять по трём осям.
Казалось бы, маленький дрон не может летать долго — аккумулятор быстро сядет. Но компания DJI удивляет и в этом плане. Её крохотный по меркам «фантомов» квадрокоптер тоже летает около получаса. Кстати, существует слегка усечённая версия Mavic Pro, лишенная приставки «Platinum».
Её комплект более скуден, а время полета у такого дрона меньше примерно на 3-4 минуты. Тем не менее, и такой результат хорош — об экономии нескольких десятков тысяч рублей вполне можно подумать. Что касается DJI Mavic Pro Platinum, то эта версия продается в России примерно за 100 тыс. рублей.
Dji phantom 4 pro
- Время полета: 30 мин
- Дальность полета: 3500 м
- Камера: 20 Мп, 2160p
Рассмотренные ниже дроны называются полупрофессиональными лишь условно. На самом деле ими пользуются и вполне сформировавшиеся фотографы, и даже некоторые киностудии. И это не говоря о том, что подобный девайс вполне может справиться со съемкой музыкального клипа!
Так почему же DJI Phanton 4 PRO не называется нами профессиональным квадрокоптером? Дело в том, что его возможности и управление вполне может освоить обычный человек. Также вы могли заметить, что многие профессиональные изделия поставляются без камеры.
Что должен уметь профессиональный квадрокоптер с камерой и трансляцией? Автоматически следовать за объектом съемки, взмывать высоко в воздух и остерегаться препятствий. На всё это способен и DJI Phanton 4 PRO. Также сюда внедрены любительские функции — например, управление жестами.
То есть, своими руками можно заставить дрон отлететь подальше или приблизиться, после чего сделать фотографию. Съемка в случае с данной моделью происходит при помощи трёхосевого подвеса, обеспечивающего идеальную стабилизацию, и 20-мегапиксельной камеры.
Качество видео — отменное, при желании можно снимать даже в 4K-разрешении с частотой 50 кадров/с. Если же снизить разрешение до Full HD, то можно добиться частоты 120 кадров/с. Обратите внимание, камере требуется высокоскоростная карта памяти UHS-3, так как битрейт видео может достигать 100 Мбит/с.
В целом DJI Phanton 4 PRO получился замечательным дроном. Конечно, здесь нет совсем уж сугубо любительских функций, вроде управления со смартфона. Да и его размеры устроят не каждого человека. Тем не менее, практически всех должна порадовать резвость коптера — максимально скорость полета может достигать 20 м/с.
Syma x5uw
- Тип управления: Wi-Fi, радиоканал
- Дальность полета: 70 м
- Время полета: 7 мин
В последнее время особую популярность набирают дроны, за полетом которых можно наблюдать с видом от первого лица. В идеале для этого используется камера с передатчиком, работающим на частоте 5 ГГц. Однако такое решение слишком дорого, поэтому оно компанией Syma не применяется.
Вместо этого она подключает камеру к традиционному передатчику Wi-Fi. А в случае с Syma X5UW таким способом реализовано и управление. То есть, дрон поставляется без пульта (наиболее дешевые его версии), для запуска и полетов потребуется смартфон или планшет.
Производитель обещает 70-метровое удаление устройства от смартфона. Однако на практике всё зависит от конкретной модели телефона, чаще всего добиться такого расстояния невозможно. Если же использовать одновременно пульт и смартфон, то это ещё сильнее влияет на качество полета.
Виной тому — передача картинки по той же частоте, что и команды для осуществления виражей. Также нельзя не отметить тот факт, что квадрокоптер Syma X5UW получил продуманный аккумулятор. Он не имеет, как это бывает в случае с дешевыми моделями дронов, провода с маленьким разъемом.
Вместо этого используется монолитная конструкция — для начала работы с устройством достаточно вставить батарею в специальный слот. Обратной стороной такого решения является чуть увеличившаяся стоимость аккумулятора. Увы, но время полета не изменилось — даже в идеальных условиях, когда нет абсолютно никакого ветра, не стоит рассчитывать на более, чем 10 минут нахождения в воздухе.
Изделие имеет Headless режим, когда его не составляет труда вернуть обратно. Также здесь заявлена поддержка высоты — то есть, левый стик при отпускании возвращается в центральное положение. Но гораздо более важным выглядит факт наличия защиты от избыточного тока и низкого уровня заряда.
Во втором случае устройство автоматически снижается и идет на посадку. Но, к сожалению, поддержки GPS здесь нет, поэтому автоматического возвращения домой не происходит, как не может девайс оставаться на одном месте — его обязательно будет сносить ветер.
Пожалуй, размеры квадрокоптера являются главным его преимуществом. На данный момент это самый маленький FPV-дрон в линейке Syma. Тем не менее, он не настолько мал, чтобы не противостоять ветру.
Typhoon h pro-rs realsense
- Дальность полета: 2000 м
- Продолжительность полета: 25 мин
- Камера: 2160p, 30 кадров/с
- Стабилизатор: трёхосевой
Это устройство обладает шестью винтами, поэтому правильнее называть его гексакоптером. Изделие оценено в 140 тыс. рублей, поэтому покупать его будут только профессионалы. Их должно устроить время полета, достигающее здесь 25 минут. Вряд ли они будут придираться и к функции FPV.
Трансляция видео на дисплей пульта осуществляется по частоте 5,8 ГГц, картинка хорошо принимается на всей дистанции полета, рекомендованной производителем. В теории можно улететь и за двухкилометровую отметку, здесь всё зависит от того, какая внизу местность, нет ли линий электропередач и сотовых вышек. Однако ориентироваться в такой момент придется по карте, так как трансляция видео, скорее всего, прервется.
Как уже сказано выше, поставляющийся в комплекте с Typhoon H Pro-RS RealSense пульт обладает собственным дисплеем. Он имеет 7-дюймовую диагональ и HD-разрешение. Картинка получается детализированной, как хорошо различима и вся телеметрия. С прошивкой версии 3.
0 даже появилась возможность просмотра гистограмм, что по достоинству оценят многие профессиональные фотографы. Следует заметить, что крепящаяся к трёхосевому подвесу дрона камера умеет снимать 4K-видео с частотой 30 FPS. Делает она это при помощи широкоугольного объектива, имеющего угол обзора в 115 градусов.
Интересно, что управлять гексакоптером могут два человека. В этом случае понадобится второй пульт, поставляющийся в комплекте. Он похож на обычный пульт ДУ, который используют для переключения каналов на телевизоре. С такого аксессуара задаются полетные параметры, тогда как основной пульт будет использоваться строго для управления съемкой.
Вспомогательный аксессуар располагает водонепроницаемым чехлом, поэтому переживать по поводу его сохранности не стоит. Что касается режимов видеосъемки, то их здесь достаточно много. Гексакоптер способен следовать за объектом съемки, облетать его и двигаться по конкретному маршруту.
Электроника девайса автоматически следит за высотой, поэтому дрон без труда летает даже в условиях неровного ландшафта — в ближайший холм он точно не врежется. А ещё здесь доступна съемка селфи, коптер в данном режиме ориентируется на жесты пользователя.
Xiaomi mi drone 4k
- Камера: 2160p (внешняя)
- Тип управления: радиоканал
- Дальность управления: 2000 м
- Время полета: 27 мин
Компания Xiaomi выпускает, как кажется, абсолютно всё. От зонтов до квадрокоптера Mi Drone 4K. Этот девайс продается в нашей стране примерно за 35 тыс. рублей. Но не исключено, что где-то его можно приобрести и ещё дешевле. По своим характеристикам он сравним с каким-нибудь вторым или третьим «фантомом».
В частности, здесь тоже имеются навигационный чип и несколько других вспомогательных датчиков. На крупные препятствия реагирует ультразвук, поэтому врезаться в дом дрону не удастся. Ещё здесь присутствует камера, дополненная отличным трёхосевым подвесом.
То есть, вы можете наклонять квадрокоптер вправо, влево, вперед, назад — горизонт ни в одном из случаев не завалится. Камера умеет снимать в 4K-разрешении, но лучше остановиться на Full HD. Качество картинки весьма приятное — оно уступает только камерам, которые стоят дороже этого самого дрона.
Увы, но это далеко не идеальный среднебюджетный квадрокоптер. У него есть пара ярко выраженных проблем:
- Использовать устройство предлагается в паре со специальным приложением, которое нужно установить на свой смартфон.
- Первые 300 минут полета будут в режиме новичка, когда будут действовать многие ограничения. На самом деле это сущий бред, ведь новички столь крупные квадрокоптеры не покупают — они учатся летать на более компактных и дешевых моделях.
- Передача картинки на смартфон осуществляется по USB-кабелю. Если этот порт является низкоскоростным, то картинка будет едва понятна, а на большое расстояние дрон попросту не улетит.
- Дальность полета вообще не радует. В характеристиках заявлены 2000 м, но на практике проблемы могут начаться гораздо раньше.
- Неприятные чувства вызывает ограничение в виде 120-метровой высоты. Квадрокоптер мог бы подняться и выше, но эта возможность заблокирована даже после отключения режима новичка.
- В некоторых экземплярах отказывается калиброваться цифровой компас. А это может однажды привести к печальным последствиям. Говорят, что с новой версией прошивки эта проблема устранена.
Словом, дрон у Xiaomi получился неплохим, но со своими недостатками. Однако рассмотреть вариант его покупки вполне можно. Но многие люди предпочтут подождать выпуска второй модели.
Калибровка простых моделей квадрокоптеров
Чтобы откалибровать квадрокоптер перед первым запуском, нужно перевести оба стика пульта управления в нижнее положение, а затем влево до упора. Когда прозвучит длинный звуковой сигнал, а светодиодная подсветка на дроне перестанет мелко моргать, дрон откалиброван и готов к запуску.
Это важно:
Если после калибровки датчиков, квадрокоптер все-таки тянет в сторону, для его качественной стабилизации нужно произвести триммирование (точную настройку).
Для этого используем триммеры снизу и слева от правого стика на пульте ДУ.
Если квадрик уводит влево, кликните несколько раз на кнопку триммера «вправо». Если замечаете крен вправо, то нажмите на триммере «влево» несколько раз. По аналогии настройте полет дрона вперед/назад.
В идеале, при запуске двигателей дрон должен подниматься в воздух и удерживать положение «без заносов». Добиться этого можно только в закрытом помещении или в абсолютно безветренную погоду.
Опытные пилоты производят триммирование в полете (нужно поднять дрон на высоту не менее 0,5 метра). Как начинающий летчик, можете пробовать настроить коптер на земле. То есть взлететь, увидеть в какую сторону заносит дрон, приземлиться, сделать несколько кликов на нужную кнопку триммера, а затем снова подняться в воздух, чтобы ощутить разницу. И так до тех пор, пока квадрокоптер не зависнет идеально в воздухе.
Медленно, но уверенно.

Если не получается…
Если точная настройка квадрокоптера (триммирование) не дает нужного эффекта, возможно дело не в гироскопах. Может случиться, что двигатели расположены не симметрично или повреждены лопасти. Еще одна возможная причина – какому-то из моторчиков не хватает тяги, чтобы ровно поднять дрон в воздух. В этом случае не обойтись без опытного помощника или даже мастера.
Как пожелание…
Не спешите выжать из нового квадрика все соки в первый же день полетов!
Помните, что первые запуски, это для него всего лишь тестирование и проверка работоспособности, а для вас – проверка на выдержку.
Поэтому, не спешите, иначе рискуете разочароваться до того, как новинка принесет вам наслаждение.
Квадрокоптеры dji — история успеха дронов
Китайскую компанию DJI основал Ван Тао, увлекавшийся в то время беспилотными летательными аппаратами. Он всегда удивлялся тому, что подобными устройствами так сложно управлять. В результате он решил создать собственный дрон. Для этого он придумал особый контроллер полета, который ориентируется на показания гироскопа.
К 2023 году инженеры DJI разработали особый контроллер полета, который отныне ориентируется не только на гироскоп, но и на GPS. Оснащенному им квадрокоптеру можно было задать маршрут, по которому он затем полетит. Но стоимость такого дрона в те времена составляла астрономические $10 тыс.
К счастью, со временем в DJI наладили массовый выпуск контроллеров полета и самих дронов. Вскоре на свет стали появляться квадрокоптеры стоимостью менее $800. Именно в этот момент продукция DJI стала необыкновенно популярной. Покупать «летающую камеру» стали даже обычные люди, зарабатывающие деньги отнюдь не видеосъемкой.
В 2023 году состоялся выпуск DJI Phantom, что позволило закончить год с выручкой в размере $130 млн. Годом позже удалось продать 400 тыс. экземпляров данной модели. Ещё через год оборот компании составил $500 млн. И думается, что цифры будут продолжать расти ещё много лет, ведь рынок дронов до сих пор активно развивается.
Продукция DJI отличается от конкурентов не только надежностью и дальностью полета, но и продуманным ПО. Современные квадрокоптеры DJI умеют летать совершенно самостоятельно, снимая объект с разных ракурсов. Наиболее дорогие модели оснащены множеством ультразвуковых и оптических датчиков, благодаря которым система реагирует на внезапно возникающие препятствия.
Наконец, научились в DJI и производству отличных камер. Если раньше по качеству видеосъемки они чуть-чуть уступали экшн-камерам от GoPro, то сейчас они даже превосходят их. Здесь сыграл свою роль и тот факт, что новые дроны обладают большей грузоподъемностью, в связи с чем камера не обязана быть легкой и маленькой.
Размеры квадрокоптеров, как правильно выбрать
Один из самых важных параметров. Как говорилось выше, даже полупрофессиональные модели квадрокоптеров могут быть весьма миниатюрными. Однако самые маленькие девайсы страдают от всё той же беды — ветер их буквально сносит. Тем не менее, иногда всё же есть смысл приобрести дрон, помещающийся на ладони.
Если он обладает хорошим пультом, то это позволяет приступить к изучению управления. Летая над мягким ковром, можно не переживать, что вы сделаете что-то не так. Да и бытовой технике миниатюрный девайс вряд ли причинит какой-то заметный ущерб. Однако от телевизоров и мониторов лучше держаться подальше.
В целом, квадрокоптер маленького размера служит для развлечения. На него не повесить даже самую маленькую камеру — такое изделие не предназначено для поднятия дополнительного веса. Но зато подобное устройство легко взять с собой, например, в поездку к родственникам. Поверьте, ваши бабушки и дедушки будут удивлены даже такому дрону!
Если же вы хотите ощутить настоящее управление квадрокоптером, то лучше взглянуть на модели среднего размера. Да, с их переноской возникнут проблемы — придется использовать хотя бы традиционный рюкзак. Но зато изделие спокойно сможет летать на улице, когда нет очень сильного ветра.
При этом подобные девайсы всё ещё подходят для того, чтобы опробовать их дома — для этого в комплекте можно найти защитные дуги. Другой важной особенностью дрона среднего размера является возможность смены аккумулятора. Дополнительные батареи для каких-нибудь Syma или Holy стоят очень недорого, а иногда они поставляются вместе с квадрокоптером.
Самые большие дроны нужны только для тех случаев, когда вам требуется видеосъемка с высоты или транспортировка какого-то груза. Изделия среднего размера если и оснащаются камерой, то весьма крошечной — получающееся видео выкладывать куда-то будет стыдно. Впрочем, исключения из правила случаются всё чаще, что не может не радовать.
Крупные квадрокоптеры брать с собой достаточно сложно, так как они занимают собой практически весь рюкзак. Компания DJI даже выпускает собственные рюкзаки, рассчитанные под конкретную модель дрона, идеально защищающие девайс от повреждений.
Разновидности квадрокоптеров
В первую очередь вам нужно понять, для каких именно целей будет использоваться устройство. Согласитесь, незачем брать профессиональную модель, если изделие приобретается ребенку. Обратный пример тоже вполне логичен — для профессиональной видеосъемки не подойдет дрон с простенькой 2-мегапиксельной камерой, продающийся за 5 тыс. рублей.
Все современные квадрокоптеры условно делятся на несколько разновидностей:
- Дроны-игрушки — такие изделия имеют наименьший ценник. Чаще всего они получаются очень маленькими, в связи с чем их не рекомендуется выносить на улицу, где ветер попросту сдует такой квадрокоптер. Многие модели управляются при помощи смартфона, что сильно снижает радиус действия.
- Любительские дроны — их сейчас производится больше всего. Такие квадрокоптеры тоже бывают совершенно разными. Чаще всего производитель делает выбор в пользу средних размеров, а управление возлагает на специальный пульт. Некоторые модели имеют встроенную камеру. Однако её разрешение редко достигает приемлемого значения, да и съемка без стабилизатора ни к чему хорошему не приводит.
- Любительские дроны с камерой на подвесе — уже достаточно продвинутые решения, за которые просят немалую сумму. Тем не менее, для съемки качественного видео такие модели всё ещё не подходят, так как они не оснащены продвинутым функционалом. Да и не всегда в их состав входит стабилизатор — иногда приходится «колхозить», устанавливая его самостоятельно. Сколь-либо тяжелую камеру подобный квадрокоптер не поднимет.
- Профессиональные дроны среднего ценового уровня — поле, где царствует компания DJI. Такие изделия летают на километры вокруг, поднимаясь на достаточно большую высоту. Им не составляет труда нести камеру GoPro или ей аналогичную. Бывают и компактные модели со встроенной камерой — к их работе тоже не возникает никаких претензий. Также профессиональные устройства отличаются присутствием продвинутых функций — автоматическим возвращением на точку старта, самостоятельной съемкой выбранного объекта и многими другими.
- Профессиональные дроны высшего класса — эти изделия по карману только киностудиям и фирмам, зарабатывающим созданием видеоклипов или рекламных роликов. Даже свадебные фотографы практически не используют столь дорогостоящие изделия. Подобные квадрокоптеры способны поднять груз весом в несколько килограммов. Это позволяет применять их для съемкой профессиональной камерой традиционного или панорамного типа. Также эти устройства используются для транспортировки груза, военной разведки или даже спасательных действий.
Конечно же, это только условное деление. На самом деле профессиональный квадрокоптер не обязан быть большим — в ассортименте той же DJI имеется и миниатюрная модель, которая даже в школьном рюкзаке много места не займёт. Но именно на вышеприведённый список нужно ориентироваться после того, как вы определитесь с предназначением гаджета.