

- Почему квадрокоптер тянет в сторону
- Основные поломки и их причины
- Что делать и как исправить, если квадрокоптер при взлете тянет в сторону
- Базовые принципы полета квадрокоптера
- Виды неполадок квадрокоптера и способы их ремонта
- Виды рэб-пушек в россии
- Возможные неполадки
- Как проверить выход на мотор квадрокоптера, если не крутятся моторы?
- Как провести триммирование для квадрокоптера
- Неисправности гидравлики, связанные с небрежным и неграмотным обращением
- Несложный ремонт квадрокоптера (с микроскопом)
- Нестабильный полет коптера при повышенном шуме
- Обращение в сервисный центр по ремонту квадрокоптеров.
- Распространенные неисправности квадрокоптеров и других радиоуправляемых моделей
- Ремонт двигателя syma x5c
- Устранение неполадок при ремонте квадрокоптеров
- Частые причины для ремонта квадрокоптера
Почему квадрокоптер тянет в сторону
Ситуация, в которой квадрокоптер кренит набок или не взлетает, очень распространенная проблема. Вызывают неполадку несколько причин:
- Неправильные настройки. Перед отправкой в магазины дроны подготавливают для полета, но в процессе многочисленных транспортировок калибровка может сбиться.
- Слишком туго насажен один из винтов. Если при сборке допущена ошибка, и какой-то пропеллер вращается с большим усилием, нежели остальные, квадрокоптер будет тянуть в сторону.
- На ось двигателя в месте крепления винта намотались нитки, травинки или волосы. Такое часто случается со старыми дронами — сам пропеллер в порядке, но лишние элементы тормозят его вращение.
Еще одна причина, по которой квадрокоптер может тянуть в сторону, это ошибка при самостоятельной замене винта. Хрупкие пропеллеры часто ломаются, для устранения поломки необязательно обращаться к профессионалам — детали стоят дешево и не являются дефицитом.
Дрон может тянуть в сторону по причине малозаметной трещины на винте и разбалансировки конструкции
Основные поломки и их причины
Причины повреждений гидравлических компонентов разнообразны. В этой таблице собраны основные неисправности гидросистем, их причины и способы исправления.
| Отсутствует подача жидкости в систему, которую должно обеспечить насосное оборудование | Засорился всасывающий трубопровод | Прочистить |
| Недостаточное количество жидкости в баке | Добавить рабочую жидкость до требуемого уровня | |
| Подсос воздушной струи во всасывающий трубопровод | Проверить герметичность соединений и подтянуть их | |
| Неисправность насоса | Определить причину поломки и устранить ее | |
| Вязкость рабочей жидкости, не соответствующая требуемой величине | Заменить жидкость | |
| Низкое давление в системе | Высокие внутренние протечки в насосе из-за его повышенного износа | Проверить работу насосного оборудования на ХХ и под нагрузкой. Если КПД не соответствует паспортной величине, то насос реставрируют или заменяют |
| Большие протечки в системе | Поставить новые уплотнения, проконтролировать узлы на герметичность | |
| Снижение вязкости масла при повышении температуры обычно выше 50°C | Проконтролировать и улучшить условия маслоохлаждения | |
| Большие наружные утечки в насосе через его корпус | Обследовать уплотнительные элементы, осмотр корпуса насоса на предмет наличия трещин и других дефектов | |
| Повышенный уровень шума и вибраций | Засорение фильтрующего элемента | Промыть или при необходимости установить новый |
| Подсос наружного воздуха во всасывающем трубопроводе | Проверить и затянуть соединения | |
| Большое сопротивление во всасывающих трубах | Заменить их на изделия большего сечения | |
| Вибрации клапана | Проверить каналы демпфирования | |
| Слабая фиксация труб | Подтянуть крепления | |
| Резкое снижение скорости при росте нагрузки | Клапаны настроены на низкое давление | Исправить регулировку клапанов |
| Повышенные протечки | Проверить соединения и уплотнения | |
| Плавное уменьшение скорости рабочего органа | Загрязнение рабочей жидкости | Замена гидравлической жидкости |
| Засор фильтров и дросселей | Промыть или заменить фильтры | |
| Снижение вязкости рабочей среды | Залить новую гидравлическую жидкость | |
| Повышение температуры масла выше требуемого значения | Неэффективно работающая система отведения тепла | Улучшить отвод тепла от труб или бака |
| Насос не разгружается в нерабочем состоянии | Проверить и отремонтировать разгрузочное устройство | |
| Слишком большие запасы по характеристикам насосного оборудования – давлению и подаче | Подобрать насосное оборудование с параметрами, соответствующими характеристикам системы | |
| Предохранительный клапан не держит давление | Загрязнение клапанного седла или клапана | Прочистить, промыть компоненты |
| Износ седла | Заменить деталь | |
| Поломка пружины | Заменить деталь | |
| Гул и перегрев электромагнитов | Слишком жесткая пружина | Установить более слабую пружину |
| Несоответствие напряжения тока питания номинальному значению | Наладить напряжение тока | |
| Отсутствует реверс масла золотником | Заедание золотника | Разборка и промывка золотникового элемента, ослабление крепежей, повышение давления в цепи управления |
Что делать и как исправить, если квадрокоптер при взлете тянет в сторону
Если при испытании выяснилось, что дрон тянет в сторону, и летит он неровно, необходимо посадить устройство на землю и провести внимательный физический осмотр. Пошаговый алгоритм предлагается следующий:
- Винты квадрокоптера аккуратно прокручивают пальцами. Если один из пропеллеров вращается медленнее других и с ощутимым усилием, необходимо снять его и посмотреть, нет ли загрязнений на оси двигателя.
- Любой налипший мусор, травинки, шерсть и нитки, из-за которых квадрокоптер тянет в сторону, нужно снять. После этого винт устанавливают обратно, при необходимости заворачивая менее плотно, и еще раз прокручивают пальцами. Если он идет свободно, то, скорее всего, коптер в полете перестанет тянуть в сторону.
- Дрон ставят на ровной поверхности и снова пробуют запустить в воздух. Для старых квадрокоптеров механической чистки обычно оказывается достаточно.
Совет! Если винты дрона недавно приходилось менять, следует еще раз проверить направление вращения купленных пропеллеров и при необходимости переустановить их повторно.
Базовые принципы полета квадрокоптера
Несмотря на понятную принципиальную схему, вряд ли современные квадрокоптеры можно считать простыми устройствами. Даже самый недорогой беспилотник оснащается полетным контроллером и гироскопом. Продвинутые модели имеют на борту десятки датчиков, сенсоров, а сбором и анализом информации занимаются миниатюрные компьютеры.
И все же, если летательный аппарат вдруг начинает тянуть в сторону, или он не способен взлететь, то вряд ли причину стоит искать в электронике. Обычно поломка квадрокоптера заключается совсем не в этом.
Каждый квадрокоптер оснащен четырьмя винтами (квадро — четыре) постоянного шага. Под каждым винтом установлен небольшой двигатель коллекторного или бесколлекторного типа. Два винта совершают вращение против часовой стрелки, и два – по часовой.
Управление движением происходит следующим образом:
- Ускорение скорости вращения пропеллеров приводит к подъему аппарата
- Ускорение скорости вращения винтов с одной стороны и замедление с другой позволяет аппарату двигаться в сторону
- Ускорение винтов, вращающихся по часовой стрелке и одновременное замедление винтов, вращающихся против часовой, приводит к повороту квадрика
- Замедление всех винтов позволяет приземлить дрон на землю
Взлетает и летит коптер благодаря силе тяги двигателей. Стабильное положение в воздухе обеспечивается установленным на борту дрона гироскопом. Как видим, основные принципы управления довольно просты. И если, например, после команды на взлет, у коптера не получается приподняться, то проблема или в винтах, или в моторах. Другие компоненты выходят из строя заметно реже.
Современные бесколлекторные движки весьма надежны, поэтому, скорее всего, что-то не так с пропеллерами. О коллекторных двигателях этого сказать нельзя, и проверять в недорогих дронах нужно не только винты, но и моторы, тоже способные стать источником проблем.
Виды неполадок квадрокоптера и способы их ремонта
Неисправности квадрокоптера бывают разных видов. Некоторые поломки очень серьезные и требуют мастерства опытного специалиста по ремонту. Более легкие неполадки можно распознать и исправить самостоятельно.

Если в целом квадрокоптер выглядит исправным, но не исполняет команду взлета, то стоит внимательно проверить настройки. Возможно, передатчик потерял связь с дроном из-за неправильного положения ручки газа. Также передатчик не воспринимать сигналы из-за батареек. В этом случае индикатор перестанет загораться при включении. Помехой для взлета может служить неправильная установка винтов. Обязательно сверьте местоположение и маркировку с инструкцией. Владельцы могут заметить неисправности и в процессе полета. Если траектория стала неровной, то поставьте квадрокоптер на плоскую горизонтальную поверхность и попробуйте запустить заново или проверьте аккумулятор.
Заметные визуальные неисправности возникают чаще всего после резкого приземления или столкновения дрона с препятствием. Единственным способом восстановить конструкцию является механическое воздействие. Если вернуть деталь в изначальное положение путем надавливания пальцами не получилось, то обратитесь в службу ремонта.
Шаблоны Инстаграм БЕСПЛАТНО
Хотите получить БЕСПЛАТНЫЙ набор шаблонов для красивого Инстаграма?
Напишите моему чат-помощнику в Telegram ниже 👇
Вы получите: 🎭 Бесплатные шаблоны “Bezh”, “Akvarel”, “Gold”
Telegram Viber Vkontakte
или пишите “Хочу бесплатные шаблоны” в директ Инстаграм @shablonoved.ru
Шаблоны Инстаграм БЕСПЛАТНО
Хотите получить БЕСПЛАТНЫЙ набор шаблонов для красивого Инстаграма?
Напишите моему чат-помощнику в Telegram ниже 👇
Вы получите: 🎭 Бесплатные шаблоны “Bezh”, “Akvarel”, “Gold”
Telegram Viber Vkontakte
или пишите “Хочу бесплатные шаблоны” в директ Инстаграм @shablonoved.ru
Виды рэб-пушек в россии
Во время проведения Чемпионата Мира по футболу 2020 российских полицейских вооружили футуристическими ружьями-антидронами “Ступор”. Возможно, дизайнеры пушки вдохновлялись фильмом Люка Бессона “Пятый Элемент”.
Характеристики “Ступора”
- Вес у пушки внушительный – 5,5 кг;
- Дальность “выстрела” – около 500 метров;
- Время работы – до 5 часов беспрерывной “стрельбы”
- Подавление всех частот Wi-Fi (2.4-5.8 ГГц);
- Подавление сигналов СНС (спутниковая навигационная система) – GPS, ГЛОНАСС и т.д.;
- Подавление видеосигнала у БПЛА.
Такой “бластер” используется для охраны закрытых для полетов зон. Это не значит, что теперь патрульные будут каждый день ходить с ними по улице. Специальное вооружение будет использоваться при охране массовых мероприятий международного уровня, например Чемпионат Мира по футболу и Олимпийские Игры. Объем аккумулятора позволяет произвести больше 1000 выстрелов без подзарядки.
Для покупки “Ступора” не нужно специальных бумаг и разрешений. Правда цена кусается. Стоимость варьируется от 400 до 500 тысяч рублей за одну пушку. Если вы владелец частного аэродрома и вас замучили непрошеные летающие гости – “Ступор” вам поможет.
Стопдрон “Стилет”
У “Стилета” меньше вес и заряд батареи. Её хватит на час беспрерывной “стрельбы”. Масса “Стилета” – 3кг. Стоимость отпугивателя беспилотников – 280 тысяч рублей.
Еще одно отличие от “Ступора” – работа в двух режимах: отпугивание или принудительная посадка БВС. При отпугивании подавитель глушит сигнал от пульта управления, и дрон возвращается к пилоту. В режиме посадки блокируются все каналы связи у коптера, включая видеосъемку.
Защита от дронов REX-1
Модель выпущена концерном “Калашников”. Подавитель разработан для российских военнослужащих. С их помощью останавливают незаконное проникновение БПЛА на закрытые для полетов зоны: аэродромы, военные предприятия и т.д.
Как и его “гражданские” побратимы, Rex-1 подавляет сигнал от пульта к беспилотнику на расстоянии 500 метров. А вот спутниковую навигацию он глушит на расстояние до 2 километров.
Помимо основных антенн подавителя, Rex-1 оснащен стробоскопическим фонариком и лазером для “выжигания” оптики у видео и фотоаппаратуры неприятеля.
Возможные неполадки
Вне зависимости от того, насколько качественный продукт компания выпустила на рынок, рано или поздно он выйдет из строя, поэтому придется делать ремонт. Процесс починки зависит, в первую очередь, от вида неисправности.
Среди основных помолок можно выделить следующие:
- сбои в работе программного обеспечения, что приводит к выходу квадрокоптера из строя;
- постоянное падение дрона или неспособность устройства набрать достаточную высоту;
- износ деталей из-за частого использования;
- неправильное реагирование дрона на команды, посылаемые через пульт дистанционного управления;
- ошибки при получении SSID;
- выход из строя камеры и остальных компонентов после падения;
- плохая работа системы спутниковой навигации;
- минимальная автономность из-за проблем с аккумулятором;
- повреждение материнской платы или некоторых ее компонентов;
- поломка пропеллера.
Если присутствует одна из приведенных неисправностей, то необходимо незамедлительно приступить к ремонту, иначе устройство может полностью выйти из строя.
Как проверить выход на мотор квадрокоптера, если не крутятся моторы?
Прежде, чем заниматься ремонтом, по причине того, что не крутятся моторы, необходимо точно убедиться, что неисправен именно выход на мотор на полетном контроллере, именно это мы сейчас и сделаем.
Метод проверки прост и основывается на измерении уровня напряжения на всех четырех выходах на полетном контроллере и проверки, совпадают ли они.
Контроллер полета управляет регуляторами оборотов с помощью сигнала PWM (протоколы Oneshot и Multishot) или цифрового сигнала DShot.Обратите внимание, что мультиметры не умеют понимать такие сигналы. Но они могут работать как фильтр нижних частот и преобразовывать эти сигналы в показания напряжения, простыми словами, когда вы будете менять уровень газа (стик throttle, который слева на пульте), будет меняться и показания напряжения.
- Отпаяйте провода ESC от полетного контроллера.
- Подсоединитесь к Betaflight Configurator.
- Теперь измерьте напряжение на выходе двигателей с помощью мультиметра, красный на выход, а черный на землю:
В идеале, напряжение на всех четырех выходах должно быть одинаковым.
Теперь перейдите во вкладку Motor в Betaflight Configurator и переместите ползунок на 2000 (100%). Измерьте снова напряжение, оно должно возрасти после того, как вы поднимете ползунок:
Для аналоговых сигналов, таких как PWM, Oneshot, Multishot — напряжение должно быть примерно 1,5V, когда газ находится на уровне 1000 (0%), а у DShot на этой же отметке будет 0.2V.
Когда газ будет на уровне 2000 (100%), напряжение для аналоговых сигналов будет выше 3V, в то время как у DShot будет около 0.4V.
Точная цифра не имеет значения, смысл в том, чтобы все одни были одинаковы на всех выходах. Если один из выходов выдает другое значение, которое отличается от других — этот выход неисправен.
Также бывает, что после прошивки один моторперестал крутиться, хотя до прошивки работал корректно. Это может произойти по нескольким причинам:
- У вас разные ESC (да, лично мне китайцы прислали один регулятор с другой маркировкой, 3 c PRO, а один не PRO);
- Вы не сделали калибровку моторов с регуляторами.
Для первого пункта, необходимо пару раз перепрошить регуляторы оборотов, бывает, что нормально работать начинают только со 2 или 3 раза. Подробнее о прошивке по ссылке выше, в синей рамке.
По второму пункту: видите скрин выше, вкладка Моторы? Отключите аккумулятора, но при этом не отключайтесь от Betaflight, затем поднимите ползунок Master вверх. Регуляторы начнут проигрывать звуки, после того как закончат, подсоедините аккумулятор и резко переведите ползунок в нижнее положение. Регуляторы оборотов снова начнут издавать звуки.
Если мотор не начал крутиться, повторите эти два пункта. У меня это срабатывает, думаю дело в разных регуляторах.
Как провести триммирование для квадрокоптера
Если квадрокоптер летит в бок, делать нужно в первую очередь проверку его механической исправности. Но когда отладка винтов не дает результатов, и дрон продолжает тянуть в сторону, остается провести автоматическую калибровку устройства. Выполняют ее по такой схеме:
- На пульте управления коптером находят кнопки или колесики, отвечающие за триммирование.
- Дрон запускают в работу и поднимают устройство в воздух отведением левого стика вниз.
- Набирают небольшую высоту и определяют, в какую именно сторону продолжает тянуть неисправный коптер.
- При наличии крена вправо триммируют дрон влево и наоборот.
- Проводят настройку до тех пор, пока устройство не начнет двигаться совершенно ровно.
Если новый квадрокоптер заваливается в сторону при взлете, для начала можно попробовать просто сбросить заводские установки и провести калибровку гироскопа и акселерометра. Для этого аппарат размещают на ровной поверхности, включают и отводят оба стика сначала вниз и влево, а затем вниз и вправо. Об успешно выполненной настройке коптер сообщит светодиодным или звуковым сигналом.
Триммеры на пульте дрона обычно расположены возле правого стика
Неисправности гидравлики, связанные с небрежным и неграмотным обращением
Перечень правил, несоблюдение которых приводит к неисправностям компонентов гидравлики погрузчиков и экскаваторов, тракторов МТЗ, других промышленных гидросистем:
- Если в гидросистеме имеются гидроаккумуляторы, то к ремонтным работам можно приступать только после их полной разрядки.
- Для подбора уплотнительных элементов на замену необходимо измерять не сами элементы, а канавки под них. Приблизительный подбор уплотнителя приводит к повышенному трению или увеличенным перетечкам.
- Необходимо следить за тем, чтобы шланги высокого давления не имели скручиваний и перегибов в натянутом положении.
- Нельзя вносить изменения в схему гидросистемы, не отображая их документально.
- Если требуется замена компонентов гидросистемы из-за их загрязнения, то следует промыть всю систему, иначе долго она не проработает.
- Запрещается использовать силиконовый герметик при монтаже уплотнительных колец и прокладок гидробаков.
- При выборе фильтрующего элемента на замену необходимо учитывать не только его размер, но и соответствие его типа месту монтажа.
Несложный ремонт квадрокоптера (с микроскопом)
Недавно один мой хороший друг попросил меня «посмотреть» квадрокоптер
WLtoys v272
, который в результате неудачного пируэта приложился одним из лучей, после чего перестала полностью работать индикация этого луча и мотор стал работать с явными перебоями. При этом, если приложить небольшое усилие «на изгиб» — где-то что-то восстанавливалось и двигатель начинал работать в нормальном режиме.
Согласился «не глядя». И был очень впечатлен размерами «пациента»:

Надо разбираться, что не в порядке у этого крохотного ЛА.
Уронили мишку на пол,
Оторвали мишке лапу.
Все равно его не брошу –
Потому что он хороший.
Визуальный осмотр невооруженным глазом ничего не показал (ожидаемо). Но
dadget.ru
очень своевременно предоставил на тест “
портативный микроскоп
“.


И тут дело пошло гораздо веселее (и интереснее, поскольку никогда до этого не пользовался микроскопом для своих проектов в микроэлектронике).
Все последующие фото сняты микроскопом, никаким обработкам не подвергались (только масштабирование). Каждая фото — ссылка на полноразмерный оригинал изображения.
Одна из первых фотографий «материнской платы» квадрокоптера (для оценки возможностей микроскопа):

Сразу расскажу, что этот квадрокоптер построен по довольно оригинальной схеме: вся механическая часть («крестовина») совмещена с электронной частью («печатная плата»). Собственно, весь «скелет» квадрокоптера является печатной платой (ну или наоборот: печатная плата является «крестовиной»).
С одной стороны — это очень удобно: никаких лишних механических частей, но с другой — если вдруг проблемы с печатной платой (например, отломился один из «лучей») — квадрокоптер можно выбросить, поскольку нормально печатную плату восстановить скорее всего не удастся.
Но кто знает, вдруг, конкретно в этом случае повезло и удастся починить?
Начал пристально рассматривать «проблемный» луч и сразу обнаружил отсутствие одного из светодиодов (типоразмер 0603) — он просто отсутствовал, видимо, его просто целиком оторвало при ударе:

Так же вызывал сомнения (и не беспочвенно) светодиод в вершине «луча»:
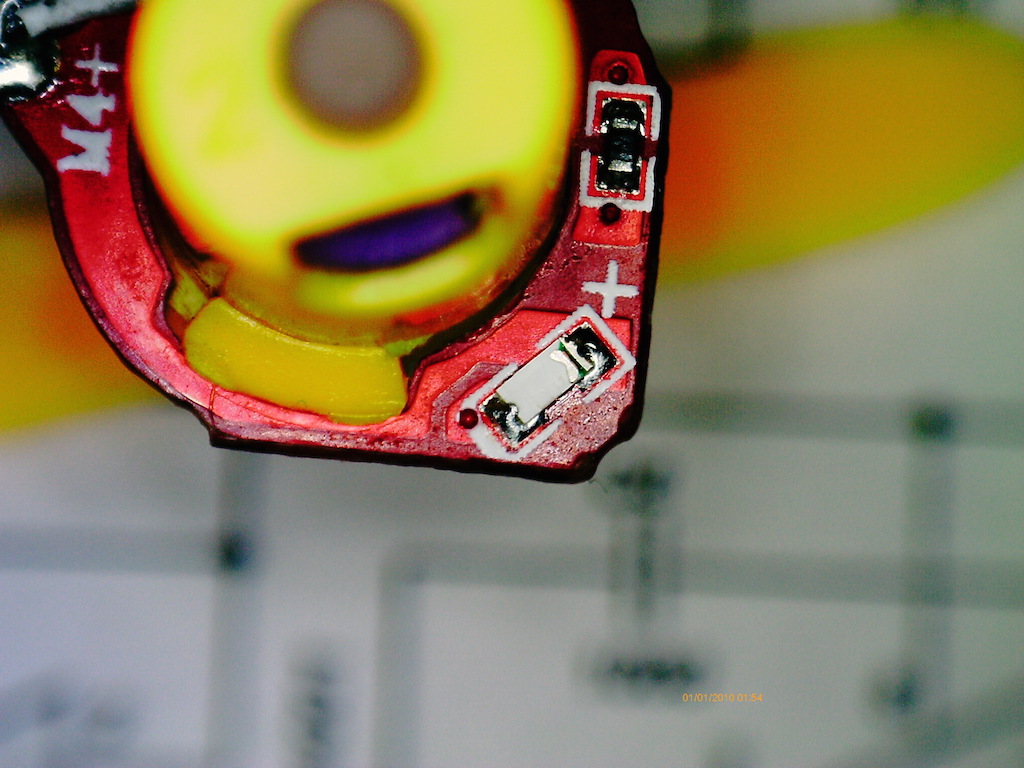
На фото видно, что от светодиода осталась только подложка. Сам кристалл и линза — отсутствуют.
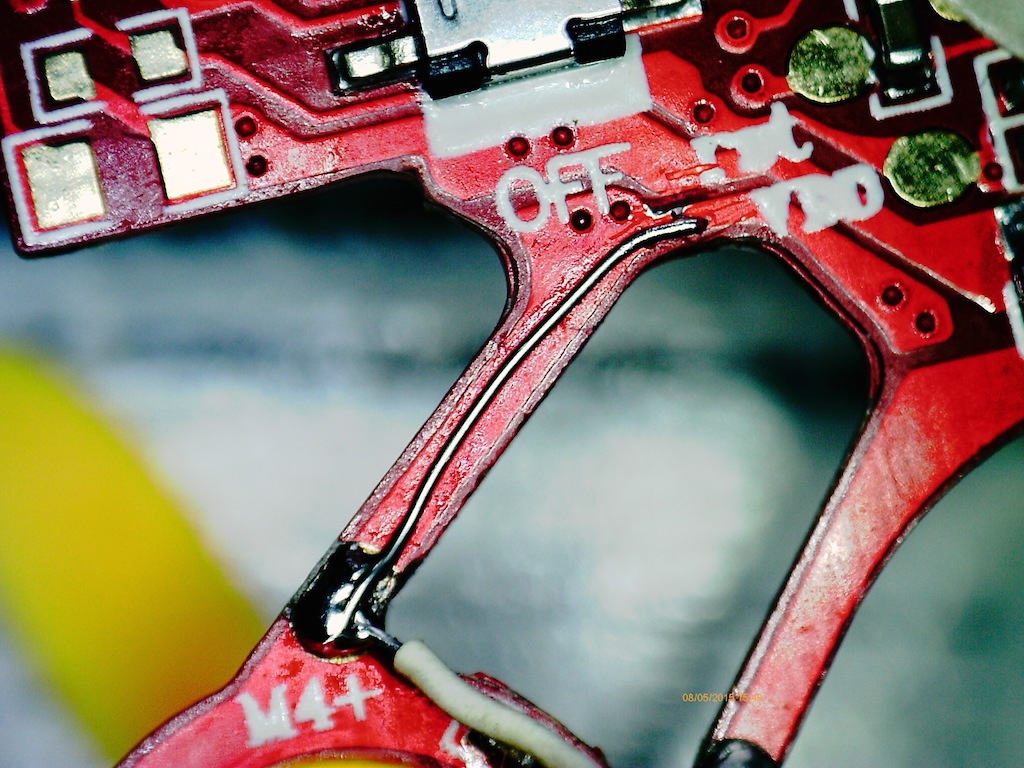
Со светодиодами разобрались, но ведь не это является главной проблемой. Нужно найти место микротрещины на луче в цепи питания соответствующего двигателя.
И опять микроскоп помог. Практически сразу вот это место вызывало сомнения:

После того как основная неисправность была локализована, ремонт стал уже «делом техники»: аккуратно убрал острым ножом часть паяльной маски, залудил «обнаженное» место и припаял тонкий проводок.
Светодиоды запаял на их законное место. Повезло, что пострадали именно красные «светики» и они были у меня в наличии (среди «сигнальных огней» еще есть синие — вот таких у меня не было и пришлось бы нарушить замысел производителя или отказаться от индикации на этом луче совсем).
Восстановленные светодиоды фотографировать не стал (никакой новой информации, просто проконтролировал качество их пайки).
После этих действий квадрокоптер «вернулся в строй» (функциональность полностью восстановилась). Видео с полетом «мухи» не будет — слишком резвая, телефоном за ней уследить практически не реально (и я пока не очень освоился с управлением для «медленных» перемещений, пригодных для съемки). Полет можно посмотреть, например, в этом видео.
Теперь замечания по поводу нового инструмента — портативного микроскопа:
- В целом, прибор понравился — просто, удобно, наглядно, доступно.
- Встроенный цветной экран позволяет оперативно рассмотреть мелкие детали, но экран все-таки мелковат и его удобно использовать в качестве грубого «видоискателя».
- При подключении к компьютеру (с соответствующим софтом, включен в комплект поставки) — есть возможность просматривать изображения непосредственно на экране компьютера (и тут уже размер отображаемого изображения ограничен только размерами монитора).
- Можно подключить практически к любому ТВ (через «тюльпаны») и использовать экран ТВ для просмотра.
- Встроенная в микроскоп система подсветки (8 белых матовых светодиодов и кольцеобразный рассеиватель) — хорошо справляются со своей задачей и существенно облегчают работу.
- «С рук» микроскопом пользоваться практически невозможно (очень малая глубина резкости, что ожидаемо), но увесистый металлический штатив в комплекте решает эту проблему.
- Можно получать как оригинальные изображения (цветные), так и черно-белые (два варианта: позитивное и негативное изображение — в некоторых случаях удобно пользоваться именно этими режимами, особенно когда надо прочитать маркировку микросхем, выполненную лазерной гравировкой).
- Есть возможность делать «таймлапс» (автоматическая серия фотографий через заданные промежутки времени) и снимать видео (фото и видео сохраняются на microSD карту (в комплект поставки не входит).
- Встроенный экран не блещет характеристиками (плохие углы обзора, «кислотные» цвета и на второй день использования появился «битый» пиксел).
- В описании заявлена поддержка русского языка, но в меню микроскопа его не нашлось (видимо, старая прошивка, но новую тоже найти не удалось). Мне не критично, но как есть.
- Богатый комплект поставки: микроскоп, зарядник, аккумуляторная батарея, чехол, A/V-кабель, USB-кабель, штатив, диск с ПО, салфетка из микрофибры.

Задачи, которые лично мне стало удобнее и проще делать с микроскопом:
Безопасных полетов вам. Берегите свои «игрушки».
Нестабильный полет коптера при повышенном шуме
Если от дрона исходит много шума, а еще он заваливается набок, когда летит, то нужно проверить, в каком состоянии лопасти. Они могут деформироваться, когда натыкаются на преграды.
Осмотрите пропеллерные блоки. Естественно, это делают когда дрон включен. То, что лопасти повреждены, можно определить, расположив общую поверхность пропеллеров на уровне глаз.
Другая причина – выпуклая форма лопасти не создает надлежащую подъемную силу. Это заметно, когда дрон летит на повышенных оборотах двигателя. Пропеллер нужно аккуратно выровнять. Можно также установить вместо него запасной.
В моделях коптеров, которые оснащены редуктором, проблему повышенного шума может вызвать загрязнения или какие-либо повреждения физические. Внутри коробки преобразования оборотов находится система шестерней. Если смазка плохая, то возникает повышенный шум.
ВАЖНО! Возможно также физическое повреждение ведущей шестерни. Ремонт сводится к проверке состояния редуктора и замене частей, которые износились или сломались.
Обращение в сервисный центр по ремонту квадрокоптеров.
При отсутствии возможности самостоятельно произвести ремонт, возможно, пришло время обратиться в специализированный сервисный центр по ремонту квадрокоптеров. Если вы купили дрон у крупного производителя дронов, такого как DJI, то вам следует проверить, покрывает ли данный случай гарантийные обязательства производителя.
Ознакомьтесь с инструкцией по эксплуатации или проконсультируйтесь в Quadrone. Если окажется, что ремонт осуществим по гарантии, то мы его выполним за счет производителя. Если ремонт не выполним по условиям гарантии, то у нас есть все необходимые запчасти и вам вряд ли придется долго ждать, пока они появятся, как бывает в других неофициальных сервисах. Проведя тщательную диагностику, мы укажем точную стоимость ремонта квадрокоптера.
Ремонтируя дрон самостоятельно, удостоверьтесь, что своими действиями, вы не аннулируете гарантию производителя. Рекомендуем не разбирать беспилотник самостоятельно, не летать под дождем или врезаться в воду, модифицировать беспилотник с помощью неоригинальных запчастей или модифицированных деталей, или терять документ, подтверждающий покупку. Вы всегда можете купить у нас оригинальные запчасти для квадрокоптеров.
У нас много лицензированных специалистов DJI, Syma, Hubsan и даже собственные разработчики коммерческих беспилотных летательных аппаратов. Помимо прочего, Quadrone – официальный сервис, где всегда в наличии всегда оригинальные запчасти. Поэтому вам не придется долго ждать ремонта квадрокоптера, даже когда у нас очень большая загрузка. Обратившись за ремонтом дрона к нам, вы уже скоро будете снова управлять коптером.
Полезные ссылки:
Распространенные неисправности квадрокоптеров и других радиоуправляемых моделей
Падение квадрокоптера (мультикоптера), даже незначительное, способно привести к его полному выходу из строя. Последствия могут быть различными. При падении или ударе могут выйти из строя шасси, пропеллеры и т.д.; в более серьезных случаях страдает электронная система и регуляторы устройства.
Если ваша модель перестала работать вследствие падения или удара о препятствие (потолок, стена и пр.), специалисты нашего сервисного центра проведут диагностику, установят причину неисправности и произведут необходимый ремонт.
В процессе эксплуатации беспилотников могут встречаться и иные проблемы, некоторые из которых рассмотрены ниже.
Квадрокоптер (октокоптер) не взлетает. Возможной причиной может являться неправильная установка винтов либо двигателя.
При запуске двигателей наблюдаются посторонние шумы, во время полетов модели присутствует необычный шум. Подобное может происходить при повреждениях корпуса или пропеллеров.
Двигатель модели не работает. Если контакты подсоединены и провода исправны, то скорее всего, двигатель сгорел и потребуется его замена.
Квадрокоптер или октокоптер при полете постоянно заносит в сторону. Причиной служит сбой калибровки устройства. Выполнение калибровки поможет устранить неисправность.
Также у беспилотников могут наблюдаться проблемы с камерой, неполадки центральной платы и другие неисправности. Если вы столкнулись с одной из вышеперечисленных проблем или с иными вопросами, наши мастера всегда готовы помочь вам.
Ремонт двигателя syma x5c
Мы бы советовали не тратить время и сразу обращаться за советом к мастерам. Но если вы уверены в себе (или, давайте честно, вам просто очень интересно), то можете проверить провода и контакты — если с ними все в порядке, то отправляйтесь в сервис. Дело может быть как в сгоревшем двигателе, так и в регуляторе скорости.
Снимите крышку корпуса, чтобы проверить, если ли проблема разъемами и соединением. Если что-то отсоединилось, то можно просто припаять проводок на место. Если же таких неполадок не выявлено, то нужно менять материнскую плату или какой-либо из двигателей коптера.
На каждом квадрокоптере есть две пары разных по работе двигателей — одни совершают движение по часовой стрелке, а другие — против. На модели X5C они очень легко различимы по цветам проводов. Те, что крутятся по часовой стрелке синие и красные провода, против часовой — белые и черные.
[affegg id=45]
Новые запчасти можно найти в интернете. Для Syma X5C они не будут стоить дорого. Останется только дождаться детали. Ускорить доставку можно, заплатив курьерской службе.
Когда у вас будут все необходимые детали, проверьте наличие инструментов и других материалов, которые вам также понадобятся при ремонте:
- Отвертка;
- Кусачки;
- Паяльник;
- Вольтметр;
- Олово, свинец, смола для пайки;
- Запасные части для замены неисправных компонентов;
При замене моторов вы должны обратить внимание на полярность моторов. Нужно припаять провода двигателя к плате приемника в следующем порядке:
- Двигатель M1 (против часовой стрелки) — от белого до M1 и черный M1-
- Двигатель M2 (по часовой стрелке) — Красный к M2 и синего М2-
- Двигатель M3 (против часовой стрелки) — от белого до M3 и черный M3-
- Мотор M4 (по часовой стрелке) — Красный к M4 и синего до М4-
После того как вы припаяли обратно новые моторы, включите квадрокоптер, чтобы увидеть, если все двигатели вращаются свободно и правильно. Если все в порядке, то смело завинчивайте обратно все болты корпуса и наслаждайтесь полетами.
Устранение неполадок при ремонте квадрокоптеров
Если вам повезло, и вы не заметили каких-либо внешних повреждений на своем дроне, за исключением, например, поломки винта, проведите несколько тестов, чтобы убедиться, что квадрокоптер полностью жизнеспособен и нормально функционирует.
Снимите все винты, используйте другую батарею, включите дрон и попытайтесь выполнить привычные действия, чтобы совершить полет. Очевидно, что без винтов, беспилотник не будет летать. Тем не менее, вы можете наблюдать, реакцию двигателей. Проходя последовательность загрузки квадрокоптера, происходят внутренние проверки прошивки, датчиков и камеры.
Следующий шаг – прикрепить пропеллеры и пройти простое тестовое летное испытание. Не летайте слишком высоко и не пытайтесь выполнять какие-либо скоростные маневры. При успешном прохождение и положительном ответе коптера на все ваши действия, допустимо продолжить летать дальше.
Если этот тест не пройден успешно, то во время столкновения что-то было повреждено, и у беспилотника возникли внутренние проблемы. В таком случае, вам необходимо обратиться в сервис по ремонту квадрокоптеров.
Частые причины для ремонта квадрокоптера
Важно, чтобы вы, как оператор беспилотника, понимали, какие ситуации могут вызвать сбой дрона, и какие шаги предпринять, чтобы избежать их. Чтобы помочь вам понять, что может привести к крушению, поломке или потере вашего летательного аппарата, мы составили список распространенных причин, из-за которых потребуется ремонт квадрокоптера.
Полет в режиме FPV (вид от первого лица). Когда вы летите в этом режиме, очень легко потерять представление о том, где находится ваш дрон, потому что ваше внимание сосредоточено на видеоэкране, а не на окружающем пространстве. Если вы еще дополнительно надеваете специальные очки для FPV полетов, то вероятность столкновения с другими объектами увеличивается в разы.
Потеря ориентации – когда вы впервые учитесь летать на квадрокоптере, легко потерять его ориентацию. Вы думаете, что летите в одну сторону, но, когда вы пытаетесь лететь влево, ваш дрон идет в другую сторону, допустим, прямо в дерево. Лучше всего летать на открытой местности, например в парке, чтобы вы могли понять, на что ориентирован дрон.
Полеты на дальние расстояния – забавные и заманчивые приключения, чтобы увидеть, как далеко или как высоко вы сможете летать на своем квадрокоптере. Это не очень хорошая идея как с точки зрения безопасности, так и иногда, с точки зрения закона.
Вы всегда должны летать в пределах прямой видимости и никогда не летать слишком высоко. В случае нарушение закона, вам грозят штрафы. Кроме того, вы можете поставить под угрозу самолет, летящий выше этой высоты. Полеты за пределами вашей прямой видимости могут привести к сбоям и, возможно, к потере вашего дрона.


