

- Dji phantom 3 усовершенствованная замена двигателя, ремонт за 11 шагов ⚙️ [инструкция с фото]
- Базовые принципы полета квадрокоптера
- Высокое качество мощный безщеточный двигателя quadcopter по отличным ценам –
- Защита от отказа наземной станции (failsafe ground control station)
- Как выбрать двигатель для квадрокоптера
- Как выбрать пропеллеры и двигатель: важные параметры
- Квадрокоптер не реагирует на пульт
- Краткий гайд по квадрокоптерам для fpv. часть третья – про двигатели и регуляторы.
- Моторы для drone racing формата 2204
- Проблема: 4-й мотор вращается медленно, запаздывает старт
- Разборка квадрокоптера spl x5
- Тестирование корректной работы срабатывания защиты дроссельного газа
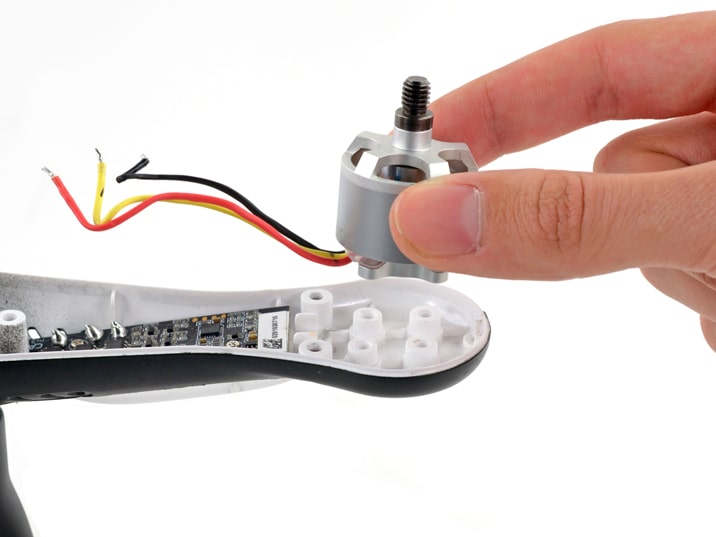
Dji phantom 3 усовершенствованная замена двигателя, ремонт за 11 шагов ⚙️ [инструкция с фото]
Это руководство покажет вам, как заменить каждый двигатель. Винты, которые удерживают каждый двигатель на месте, должны быть удалены, а провода, которые крепятся к каждому двигателю, должны быть демонтированы.
Расположив аккумулятор лицом к себе, найдите две защелки сверху и снизу аккумулятора, как показано на рисунке.
Переверните Phantom 3 Advanced вверх ногами.
Переверните дрон вверх дном так, чтобы моторы были обращены к столу.
Отвинтите четыре 3мм-винта длиной 5,5 мм непосредственно под мотором с помощью отвертки с шестигранной головкой 2,0 мм.
Нажмите на две лапки пальцем и большим пальцем и аккуратно выдвиньте батарею на себя из рамки квадрокоптера.
Другой рукой обязательно держите квадрокоптер неподвижно, чтобы он оставался неподвижным.
Удалите четыре 7 мм длиной 2 мм винта с помощью отвертки T-6.
Удалите клей, который покрывает три провода, которые соединяют двигатель с контроллером полета. При необходимости используйте пластиковый инструмент открытия или металлический инструмент.
Повторите для каждой руки.
Удалите восемь 5-миллиметровых 2,5-миллиметровых винтов, используя отвертку T-8.
Проследите черный, желтый и красный провода от двигателя к контроллеру полета.
Desolder три провода, где они подключаются к контроллеру полета. Ознакомьтесь с этим руководством по удалению припоя, чтобы узнать, как удалить припой: .
Извлеките двигатель и, при необходимости, повторите для других двигателей.
Удалите четыре винта глубиной 3 мм длиной 3 мм с помощью отвертки Т-8.
Аккуратно переверните фантом, двигатели должны быть направлены вверх.
Отогните серебряные наклейки со шва в обложке.
Используя пластиковый spudger, медленно разделите две половинки пластиковой оболочки.
Медленно снимите верхнюю часть пластикового корпуса примерно на полпути. Существует ленточный кабель, который соединяет крышку и плату управления.
Следуйте за ленточным кабелем к плате управления и найдите разъем, который соединяет кабель с платой управления.
Нажмите на язычок на боковой стороне разъема и потяните за кабель.
Продолжайте снимать раковину до конца.
Базовые принципы полета квадрокоптера
Несмотря на понятную принципиальную схему, вряд ли современные квадрокоптеры можно считать простыми устройствами. Даже самый недорогой беспилотник оснащается полетным контроллером и гироскопом. Продвинутые модели имеют на борту десятки датчиков, сенсоров, а сбором и анализом информации занимаются миниатюрные компьютеры.
И все же, если летательный аппарат вдруг начинает тянуть в сторону, или он не способен взлететь, то вряд ли причину стоит искать в электронике. Обычно поломка квадрокоптера заключается совсем не в этом.
Каждый квадрокоптер оснащен четырьмя винтами (квадро — четыре) постоянного шага. Под каждым винтом установлен небольшой двигатель коллекторного или бесколлекторного типа. Два винта совершают вращение против часовой стрелки, и два – по часовой.
Управление движением происходит следующим образом:
- Ускорение скорости вращения пропеллеров приводит к подъему аппарата
- Ускорение скорости вращения винтов с одной стороны и замедление с другой позволяет аппарату двигаться в сторону
- Ускорение винтов, вращающихся по часовой стрелке и одновременное замедление винтов, вращающихся против часовой, приводит к повороту квадрика
- Замедление всех винтов позволяет приземлить дрон на землю
Взлетает и летит коптер благодаря силе тяги двигателей. Стабильное положение в воздухе обеспечивается установленным на борту дрона гироскопом. Как видим, основные принципы управления довольно просты. И если, например, после команды на взлет, у коптера не получается приподняться, то проблема или в винтах, или в моторах. Другие компоненты выходят из строя заметно реже.
Современные бесколлекторные движки весьма надежны, поэтому, скорее всего, что-то не так с пропеллерами. О коллекторных двигателях этого сказать нельзя, и проверять в недорогих дронах нужно не только винты, но и моторы, тоже способные стать источником проблем.
Высокое качество мощный безщеточный двигателя quadcopter по отличным ценам –
В прошлом эти. мощный безщеточный двигателя quadcopter раньше были огромных размеров, что делало их громоздкими и не универсальными. Со временем технология значительно улучшилась, и в настоящее время это происходит. мощный безщеточный двигателя quadcopter бывают разных размеров с более широким набором функций. Здесь вы найдете широкий выбор. мощный безщеточный двигателя quadcopter, который идеально подходит для вашего устройства.
Продукты на этой платформе обеспечивают качество и эффективность в зависимости от различных потребностей и бюджетов. Продукты на платформе соответствуют установленным стандартам, обеспечивая эффективное функционирование. Производители этих. мощный безщеточный двигателя quadcopter имеют опыт производства и предлагают продукты, которые адаптируются к меняющимся потребностям рынка. Файл. Представленные здесь мощный безщеточный двигателя quadcopter предлагают большой набор функций на выбор: крутящий момент, количество оборотов в минуту, бесщеточные двигатели и размер, что позволяет вам покупать лучшее. мощный безщеточный двигателя quadcopter в соответствии с вашими требованиями и бюджетом.
На Alibaba.com вы можете получить. мощный безщеточный двигателя quadcopter предложения и предложения с учетом вашего бюджета. Получите качественную долговечность. мощный безщеточный двигателя quadcopter для удовлетворения всех ваших потребностей в обширном ассортименте продуктов, предлагаемых на продажу, в зависимости от ваших требований к размеру, номинальной мощности и простоте обслуживания.
Защита от отказа наземной станции (failsafe ground control station)
В разделе Advanced Parametr List ПО Mission Planner установите FS_GCS_ENABLE параметр для:
- 0 – для отключения защиты отказа наземной станции
- 1 – для включения и всегда режим RTL в случае потери связи
- 2 – будет тоже переход в режим RTL, но если квадрокоптер до срабатывания защиты потери связи с наземной станцией был в режиме Auto – миссия продолжается (а по окончанию миссии идет возврат домой).
Если вы использовали наземную станцию для управления квадрокоптера (т.е. с помощью джойстика),
а затем потеряли управления с земли, то по истечении 5 секунд потери связи произойдет следующее:
- Команда “постановка на охрану” (disarm) – если вы были в режиме стабилизации или Acro и ваш дроссельный газ был на нуле
- Переключение в режим RTL – если у вас есть фиксация по спутникам GPS и вы более чем на 2 метра от вашего исходного положения
- Переключение в режим Land – если у вас нет фиксации по спутникам GPS или аппарат находится в пределах 2 метров от исходного положения
- Продолжение с миссией – если вы находились в режиме AUTO и установили параметр GCS Failsafe Option = 2 (Enabled_continue_in_auto_mode).
Когда защита отказа пропадает (когда восстанавливается контакт с наземной станцией) квадрокоптер останется в текущем режиме полета.
Он не будет автоматически переключен на тот режим, который был до срабатывания защиты отказа. Это означает , что если вы летите в
режиме стабилизации и у вас срабатывает защита отказа – это приведёт к тому, что режим полета измениться на RTL или Land и
если вы хотите повторно взять под контроль квадрокоптер вы должны будете вернуть режим полета стабилизации.
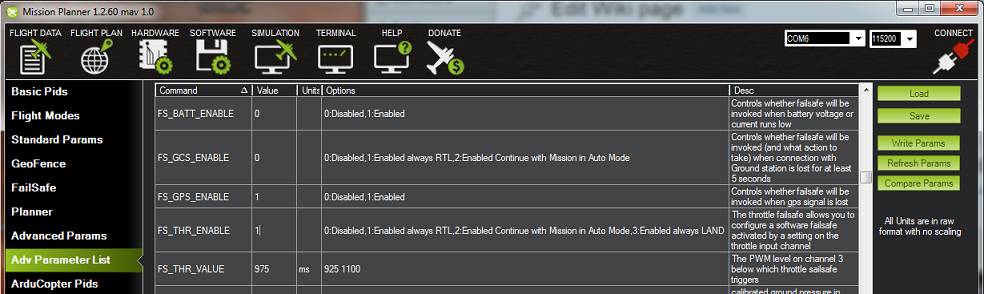
Обратите внимание: Все параметры защиты отказа можно наблюдать или установить в разделе Advanced Parametr List ПО Mission Planner
Как выбрать двигатель для квадрокоптера
Итак, теперь вы знаете основы работы и из чего он состоит, теперь узнаем, как выбрать мотор для дрона.
Размер двигателя
 Первое, что вы должны выбрать, это размер двигателя, который вы будете использовать. К счастью, большинство производителей в нашем хобби установили стандартную схему именования своих двигателей. Обычно это 4-значное число, которое выглядит примерно как «2205». Первые две цифры этого числа — это диаметр (в мм) статора, а второй — это высота (также в мм). В общем, чем больше из этих чисел, тем больше мощности двигатель может обрабатывать и чем больше крутящего момента он будет генерировать. Однако нюанс заключается в том, что большие цифры означают более тяжелый двигатель — в основном благодаря тому, что он просто «больше».
Первое, что вы должны выбрать, это размер двигателя, который вы будете использовать. К счастью, большинство производителей в нашем хобби установили стандартную схему именования своих двигателей. Обычно это 4-значное число, которое выглядит примерно как «2205». Первые две цифры этого числа — это диаметр (в мм) статора, а второй — это высота (также в мм). В общем, чем больше из этих чисел, тем больше мощности двигатель может обрабатывать и чем больше крутящего момента он будет генерировать. Однако нюанс заключается в том, что большие цифры означают более тяжелый двигатель — в основном благодаря тому, что он просто «больше».
Вот общие размеры двигателей для квадрокоптеров:
- 1806 – используются в минидронах, на них ставятся 3-х или 4-х дюймовые пропеллеры.
- 2204 – Одни из самых популярных двигателей в течение долгого времени. На них ставят 5-и дюймовые пропеллеры. 2204 начали терять популярность в 2023 году и сейчас почти не используются.
- 2205 – самые популярные моторы, на них можно ставить 5-и дюймовые трехлопастные пропеллеры.
- 2206 – набирающая популярность модель двигателей, имеет немного большие габариты за счет увеличения мощности на 15% в сравнении с 2205.
- 2207 / 2407 – Еще более мощные двигатели, гонка мощностей я бы сказал. По характеристикам, они могут выдавать тягу на 50% больше, чем 2205. Используются редко и еще не популярны.
Как выбрать пропеллеры и двигатель: важные параметры
При выборе, проектировании и сборке квадрокоптера очень важно правильно просчитать то, какие детали вам будут необходимы для достижения определенных характеристик. Зачастую бывает непонятно, как выбрать двигатель для квадрокоптера, а также подобрать подходящие ему пропеллеры. Что необходимо учесть приобретая двигатели и набор пропеллеров, которые найдут свое место на квадрокоптере, расскажем в этой статье.

Двигатели для квадрокоптеров могут иметь совершенно разные размеры, цвета и внешний вид. Но есть одна деталь, которая объединяет все моторы для беспилотников – это цилиндрическая форма, обусловленная спецификой корпуса квадрокоптера. Кроме того, большинство современных двигателей, которые призваны вращать пропеллеры коптеров, являются бесколлекторными (бесщеточными) – в их конструкции есть магниты и обмотки, но щетки, передающие ток от контактов двигателей к обмоткам, отсутствуют. В данном случае напряжение на обмотки подается с определенной частотой – в отличие от обычных моторов для постоянного тока. К слову, такому мотору по силам более быстрое вращение пропеллера, а энергетические потери сведены к минимуму вследствие отсутствия щеток.

Бесколлекторные двигатели имеют три основные характеристики, которые обуславливают выбор той или иной модели. В первую очередь, это потребляемый ток, который измеряется в амперах (А). Объем потребляемого тока напрямую зависит от мощности мотора – более высокая мощность означает большее потребление при одинаковом напряжении питания. Подъемная сила мотора зависит от силы тока, на которую также влияет нагрузка, создаваемая пропеллерами.
Вторая характеристика – это так называемый KV-rating. Этот показатель характеризует, сколько оборотов будет совершать электромотор при определенном напряжении. Суть KV-rating можно сравнить с мощностью автомобиля, измеряемой в лошадиных силах, равно как и объяснить принцип данного показателя. Для примера возьмем аналогию со спортивным автомобилем. Мощный мотор такой машины способен обеспечить быстрый разгон и высокую максимальную скорость. Но что произойдет, если попробовать сдвинуть несколько тонн груза на таком автомобиле? Ничего особенного – груз не сдвинется с места, а вся мощность мотора уйдет в пробуксовку. С другой стороны, трактор, обладающий малой мощностью, но высоким крутящим моментом и большими колесами, легко справится с такой задачей. Если вернуться в мир квадрокоптеров, то моторы с высоким KV идеально подойдут для быстрого вращения маленьких пропеллеров, в то время, как моторы с низким KV будут легко вращать большие пропеллеры на больших дронах с высокой грузоподъемностью.
Если говорить о конкретных значениях показателя KV, то для легких гоночных дронов он составляет в среднем 2000-2500, а у коптеров, способных поднимать нелегкие грузы, KV обычно варьируется в пределах 200-900.
Наконец, третьим немаловажным параметром электродвигателей является подъемная сила. Удобной величиной для измерения подъемной силы является килограмм. Так, к примеру, при использовании четырех моторов с подъемной силой в один килограмм общая подъемная сила коптера составит четыре килограмма – именно такой вес способны поднять в воздух такие моторы, включая свой собственный. При этом, не забывайте о необходимом для маневрирования и других задач резерве мощности.

Однако, сам по себе мотор не способен создавать пресловутую подъемную силу. Для этого необходим набор пропеллеров, к подбору которого можно переходить после того, как вы выбрали моторы для коптера. Один из основных параметров, на которые стоит обратить внимание – это длина лопасти, которая также зависит от задач, которые вы ставите перед аппаратом. Пропеллер для гоночных моделей обладает длиной в 5-6 дюймов, а для пропеллеров тяжелых дронов характерна длина в 15-17 дюймов. Использование больших винтов для скоростных аппаратов неоправданно вследствие высоких нагрузок на мотор и прочие детали при его раскручивании до высоких оборотов.
Угол наклона лопастей пропеллеров влияет на их сопротивляемость воздуху. Пропеллер с большим углом наклона способен поднять коптер на большее расстояние за один оборот, но создает более высокую нагрузку на мотор. Кроме того, не забывайте о направлении вращения винтов – по часовой стрелке или против.
Таким образом, к подбору моторов и винтов для коптера необходимо исходить из цели его использования и необходимой подъемной силы.
Квадрокоптер не реагирует на пульт
Если между машиной и ПДУ нет связи, в первую очередь проверяется пульт. Разряженный аккумулятор и севшие батарейки – распространенная причина отсутствия связи. Сигнализирует об отсутствии заряда в батарейках и загорающийся индикатор на коптере. В этом случае просто замените батарейку и оцените результат.
В некоторых случаях владелец аппарата неверно выполняет последовательность действий при запуске. Важно поэтапно и правильно соблюдать шаги, описанные в инструкции. К примеру: если на старте устройство лежит неправильно (на боку, перевернуто кверху вниз), оно не будет реагировать на пульт при команде подняться в воздух.
Если рекомендованные меры приняты, а аппарат по прежнему не видит пульт, проблема кроется внутри ПДУ. Возможно, нарушены контакты, имеется обрыв проводков. Иногда проблема решается чисткой контактов (в случае окисления батареек).

Краткий гайд по квадрокоптерам для fpv. часть третья – про двигатели и регуляторы.
Моторы для drone racing формата 2204
Формат 2204 устанавливается на рамы квадрокоптеров 200-300 размера и предназначены для использования с пропеллерами 5-6 дюймов.
Eachine Racer 250 Drone Spare Part BG2204 2300KV Brushless Motor CW/CCW – в продаже моторы прямого и обратного вращения (выбирается при заказе).Эти моторы устанавливаются на квадрокоптер Eachine Racer 250, поставляются без гайки.
Основной “вкусностью” этих моторов является то, что они предназначены для работы как с 3S так и с 4S аккумуляторами.
- Купить BG2204 2300KV Brushless Motor CW/CCW можно .
Ориентирован на работу с 2-3S аккумуляторами. в таблице ниже приведены базовые характеристики мотора.
- Купить мотор KingKong 2204 2300KV можно .
Интересная концепция – в корпус мотора встроен регулятор оборотов. С этими моторами не придется тратиться на дополнительные регуляторы.Вы можете выбрать 1900, 2000 или 2300 оборотов на вольт, для Drone Racing – выбирайте последнее значение.
- Купить ZTW Black Widow 2204 можно .
1806 – этот формат подходит для рам 150-200 размера. Некоторые ставят и на 250 рамы, но тут уже может быть недостаток тяги, хотя это зависит от полетного веса квадрокоптера.
Пропеллеры для 1806 обычно ставятся 4-5 дюймов. Часто для увеличения тяги используются 3-х лопастные пропеллеры.
DYS BE1806 2300KV – это небольшой мотор ставший стандартом для оборудования сборных рам или самодельных квадрокоптеров Drone Racing.
- Купить DYS BE1806 2300KV можно .
- Набор из 4-х моторов регуляторы продается .
Отличительной чертой продуктов Eachine является качество исполнения. BG1806 2300KV не является исключением, эти моторы характеризуют низкие вибрации во время эксплуатации. Вам не придется дополнительно балансировать моторы!
- Купить Eachine BG1806 2300KV можно .
Поддерживает 3S и 4S аккумуляторы. В полях не встречал, но на зарубежных форумах отзывы весьма положительные.
- Купить KingKong 1806V2 2280 можно .
Эти моторы шли в комплектах для сборки QAV250. Так сказать нонейм моторы. Отрицательных отзывов (если покупать по ссылке, а не на алиэкспрессе) не нашел.
- Купить двигатель для квадрокоптера 1806 2400KV можно .
Проблема: 4-й мотор вращается медленно, запаздывает старт
Я собрал тут свой первый коптер, успел разбить раму от хоббикинга, построил вторую раму из деталей из строительного магазина, но не суть.
Проблема в том, что у меня на квадрокоптере медленно вращается 4-й (задний) мотор. Тех. спеки: — Прошивка Quadrocopter V4.7, « », последняя — Полетная плата Хоббикинг 2.1 — Регули TowerPro w18A — Приемникпередатчик Хоббикинг 6-канальный Регули поочередно программировал, настройки сделал одинаковые.
При подключении регулей в CH3 приемника они крутят моторы нормально. При подключении к полетной плате 4-й мотор крутится сильно медленнее и начинает крутиться с запозданием. Пробовал перепрошивать полетную плату на другие прошивки, но многие из их вообще не завелись.
Посоветуйте, куда копать.
откалибровать регуляторы по газу, ещё раз всё проверить померять напряжения на входах всех регуляторов под нагрузкой
странно что плата непытаеться это скомпенсировать.
P.S. видел как KK вообще на разных винтах летает
Калибровку регуляторам делали?
Если нет, то сделайте
Калибровка газа, настройка ESC и типа батареи.
Предварительно нужно снять винты с движков, от греха подальше
Можно перед этой настройкой выполнить программирование регуляторов отдельно на желаемые параметры.
Установить стик газа на передатчике НА МАКСИМУМ!
— На плате повернуть барашек потенциометра Yaw в положение 0.
— Включить питание платы (подключить батарейку).
— На плате светодиод мигнет один раз, потом через несколько секунд три раза быстро.
— Движки должны «запеть свою мелодию» и регуляторы войдут в режим программирования (здесь можно также настроить необходимые параметры регулей, прослушав мелодии, я настраивал тормоз ) игнорируете этот сигнал регулей и переводите стик газа НА МИНИМУМ!
— Движки должны подать звуковой сигнал.
— Выключить питание платы (отключить батарейку)
— Восстановить значение барашка потенциометра Yaw в 50%
Настройка Yaw выполнена
Суть в том, что навряд ли это именно регулятор виноват. У меня была раньше модель на хоббикинговской раме, там тоже задний мотор тормозил. Потом я пересобрал и вероятность того что на заднем моторе тот же регуль, что был раньше, минимальная.
Я подозреваю что что-то не так с гироскопами. За что отвечает задний винт? Вроде бы за наклон вокруг оси x (т.е. pitch) — мои подозрения, что гироскоп питча говорит что у аппарата задрана задница, и полетная плата делает вывод, что не надо крутить задний винт. Вроде так? Значит на полетной плате надо еще настраивать Pitch, чтобы он был менее загнутым в якобы наклон с задницей вверх?
Фарлеп: Да, делал настройку всех регулей по-очереди, настраивал им всем одинаковые параметры. Штука в том, что при вращении мотора напрямую от приемника все моторы реагируют на газ нормально.
Проверял крутилку Pitch — не влияет. Похоже нашел в чем проблема: Сейчас попробовал пальцем покрутить пропеллеры — и странное дело — как раз 4-й пропеллер туго крутится. При одинаковой силе толкания лопостей на трех моторах они делают по 2 оборота вокруг оси, а на 4-м моторе — всего полоборота. Это как-то правится? Может смазать мотор надо?
Последний раз редактировалось danx; 04.03.2023 в 03:40 .
Источник
Разборка квадрокоптера spl x5
Чтобы разобрать квадрокоптер , нужно всего лишь открутить много саморезов, скрепляющих пластиковый корпус. Благо, с квадриком поставляется маленькая неудобная отвертка для этой процедуры. Крутил своей из китайского .
Что удивило внутри — провода моторов припаяли к плате, а светодиоды подсоединили через разъемы. Чем объяснить такое внимание к светодиодам непонятно. Особенно учитывая то, что из упаковки один из светодиодов у меня не горел. После перекоммутации разъема, светодиод горит исправно. Плата отмыта от флюса хорошо.
Обратите внимание на то, что крест накрест моторы имеют разные провода — синий с красным означает, что двигатель крутиться по часовой стрелке (правое вращение), а черный с белым — против часовой стрелки (левое вращение). тоже имеют свою маркировку проводов — красные обозначают перед квадрика, а зеленые — заднюю часть. Привыкнуть надо.
Также обратите внимание на разъем питания. Мало того, что он разболтан и ответная часть от аккумулятора в нем держится плохо и контакт может пропасть прямо во время полета от вибраций. Пришлось отжимать подпружиненные контакты внутри разъема аккумулятора.
Тестирование корректной работы срабатывания защиты дроссельного газа
Вы можете проверить срабатывание защиты отказа выполнив следующие тесты с APM. Подключите Mission Planner
c сопощью USB кабеля или телеметрической связью. Вы можете провести испытания без LiPo батареи,
но если вы её подключите – следует сначала удалить пропеллеры.
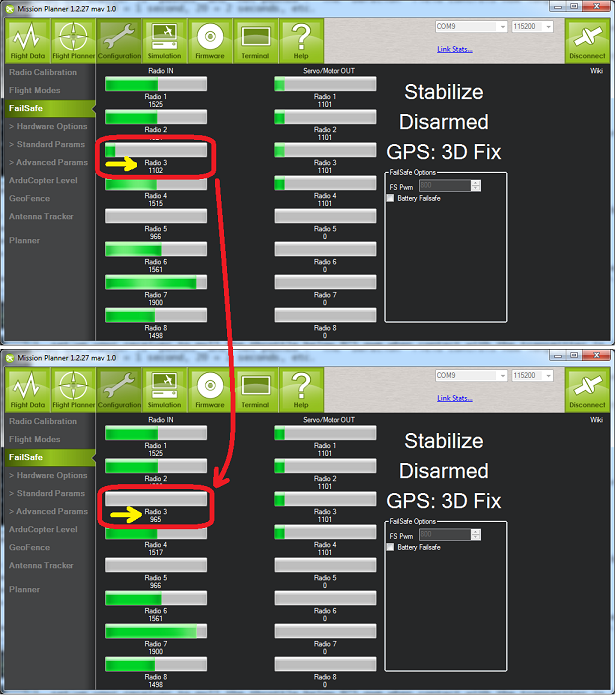
Тест № 1: поможем сделать падение канала газа при потери радиосвязи
Убедитесь, что ваш радиопередатчик аппаратуры включен и подключен с газом на нуле в режиме полета стабилизации
Значение PWM дроссельной заслонки (3 канала) должно быть примерно как в первом рисунке ниже.
Это значение может быть выше или ниже, но это определенно должно быть не менее 10 PWM выше, чем значение в области PWM FS
Выключите передатчик и показание значении дросельной заслонки PWM должна снизиться ниже по крайней мере ниже на 10 PWM чем значение PWM FS, как во втором рисунке ниже
Тест № 2: обеспечение постановки на охрану двигателей (disarm) в режиме стабилизации или Acro с дросселем газа в нуле
Переключитесь в режим стабилизации , снимите с охраны свои двигатели (arming) но сохраняйте уровень газа на нуле.
Выключите передатчик. Двигатели должны немедленно встать на охрану (disarm) (красный светодиод на плате полетного контроллера начнет мигать,
постановка на охрану будет отображаться на экране ПО Mission Planner)
Тест № 3: обеспечение изменения полетного режима до RTL или Land, когда дроссель ниже нуля
Переключитесь в режим стабилизации , вооружите свои двигатели и поднимите дроссельный газ до середины. Выключите передатчик.
Полетный режим должен перейти на RTL, если у вас есть фиксация по спутникам или режим Land , если вы не имеете фиксацию по спутникам GPS.
(режим полета и состоянии фиксации спутников можно увидеть в экране ПО Missio Planner)
Тест № 4: взять контроль после срабатывания защиты отказа газа
продолжение следует…





 купить по привлекательной цене 46990 руб. в Москве")