

Бензиновые квадрокоптеры и мультикоптеры. краткий обзор
Квадрокоптеры неожиданно ворвались в нашу жизнь и распространились повсеместно. Они получили свой второй шанс на жизнь, впервые появившись в первой половине прошлого века. Однако их основная проблема так до сих пор и не решена, — над чем и бьются множество компаний и отдельных энтузиастов.
Мультикоптер (англ. Multirotor, multicopter, многороторный вертолёт, многолёт) — летательный аппарат, построенный по вертолётной схеме, с тремя и более несущими винтами
Многовинтовые вертолёты разрабатывались ещё в первые годы вертолётостроения. Один из первых квадрокоптеров (англ. quadcopter, четырёхроторный вертолёт), который реально оторвался от земли и мог держаться в воздухе, был создан Георгием Ботезатом и испытан в 1922 году.

Источник картинки: wikipedia.org
Новое рождение мультикоптеры получили в XXI веке, уже как беспилотные аппараты. Благодаря простоте конструкции квадрокоптеры часто используются в любительском моделировании, также удобны для недорогой аэрофото- и киносъёмки.
В последнее время появились миниатюрные квадрокоптеры, умещающиеся на ладони (Walkera Ladybird, WLtoys V929, Blue Arrow nano Loop и пр). Они практически безопасны (масса аппарата менее 100 г), в то же время позволяют получить основные навыки полёта на мультироторном аппарате, так как принцип их управления ничем не отличается. Квадрокоптеры такого размера возможно запускать дома, не рискуя нанести вред людям или предметам. Некоторые модели разгоняются до впечатляющих 26 м/с[13], имеют высокое качество съёмки и управляются на расстоянии более 3,5 км.
По принципу управления мультикоптеры существуют:
Мультикоптеры имеют 3 или более винтов постоянного шага (автомата перекоса, в отличие от одно- и двухвинтовых аппаратов, нет). Каждый винт приводится в движение собственным двигателем. Половина винтов вращается по часовой стрелке, половина — против, поэтому рулевой винт мультикоптеру не нужен. Маневрируют мультикоптеры путём изменения скорости вращения винтов. Например:
Микропроцессорная система переводит команды радиоуправления в команды двигателям. Чтобы обеспечить стабильное зависание, мультикоптеры в обязательном порядке снабжают тремя гироскопами, фиксирующими крен аппарата. Как вспомогательный инструмент, иногда, также используется акселерометр, данные от которого позволяют процессору устанавливать абсолютно горизонтальное положение, и бародатчик, который позволяет фиксировать аппарат на нужной высоте. Также применяют сонар для автоматической посадки и удержания небольшой высоты, а также для облёта препятствий. Использование GPS-приёмника позволят записывать маршрут полёта заранее, с компьютера а также возвращать аппарат в точку взлёта, в случае потери управляющего радиосигнала, или снимать параметры полёта оперативно или потом.
Винты могут быть установлены непосредственно на вал двигателя, либо через редуктор.
В любительских и профессиональных мультикоптерах используются коллекторные и бесколлекторные электродвигатели и литий-полимерные аккумуляторы в качестве источника энергии. Это накладывает определённые ограничения на полётные характеристики: типичная масса мультикоптера составляет от 1 до 4 кг, при времени полёта от 10 до 30 минут (30—50 минут у уникальных единичных экземпляров). Запас энергии батарей позволяет отдельным моделям мультикоптеров улетать на расстояние до 7—12 км, на практике же радиус действия (максимальное расстояние, на которое они способны улететь с последующим возвратом в точку взлёта) обычно ограничено прямой видимостью (100—200 м при ручном управлении) либо дальностью действия аппаратуры радиоуправления и видеолинка. При этом лучшие образцы подобной аппаратуры, использующие усилители мощности радиосигнала и систему направленных антенн, способны обеспечивать стабильные: радиоуправление и видеолинк на расстояния до 100 км. Таким образом, наибольшее ограничение на радиус действия мультикоптеров накладывает именно время полёта.
Эти ограничения приводят к тому, что мультикоптеры обычно используются как аппараты «ближнего радиуса действия»: для любительских полётов недалеко от себя, для фото-видеосъёмки близко расположенных объектов и так далее (для сравнения, беспилотные самолёты с аккумулятором аналогичной ёмкости могут улетать на 10—15 км при высоте полёта 1—2 км).
Поднимаемый полезный груз моделями мультикоптеров среднего размера и грузоподъёмности — от 500 г до 2—3 кг, что позволяет поднять в воздух небольшую фото- или видеокамеру (обычно экшн-камера в более дешёвых моделях, либо зеркальные камеры в профессиональных).
Существуют и достаточно крупные модели мультикоптеров, с количеством роторов порядка 6—8 (гекса- и октокоптеры), способные поднять в воздух груз массой до 20—30 кг. Для увеличения грузоподъёмности применяют соосное расположение несущих роторов, что в случае гексакоптера, например, даёт 12 моторов и 12 пропеллеров, расположенных попарно на 6 несущих лучах.
Скорость полёта мультикоптера может быть от нуля (неподвижное висение в точке) до 100—110 км/ч.
Существуют также трёх- и пятивинтовые вертолёты (три- и пентакоптеры). Один из моторов там располагается на нанизанной на ось подвижной платформе, угол поворота которой изменяется сервоприводом — так и осуществляется поворот аппарата вокруг своей оси. Отдельно стоит отметить экспериментальные аппараты: бикоптеры, квадрокоптеры с изменяемым шагом пропеллеров, квадрокоптеры с двигателями на импеллерах, однако они не получили какого-либо распространения.
Большое количество энтузиастов занимается самостоятельной сборкой коптеров.
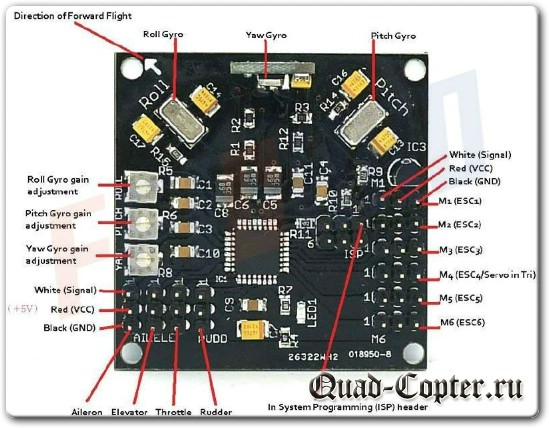
Часто для этих целей они используются широко известный недорогой полётный контроллер KK Multicopter, который имеет несмотря на свою низкую цену, достаточно широкие возможности и позволяет управлять системой, содержащий до 6 роторов включительно.
Источник картинки: www.quad-copter.ru
Следует упомянуть, что большая часть современных мультироторных систем представляет собой электрические машины, где тяговыми двигателями выступают электродвигатели, а в качестве источника энергии для них используются, в основном, литий-полимерные аккумуляторные батареи.
Исходя из всего вышесказанного, проистекает основная проблема мультироторных электрических систем: малое время работы (ввиду гораздо меньшего соотношения ёмкости аккумуляторных батарей к их весу, то есть энергоёмкости, по сравнению с любыми топливными системами) и невозможность подзарядки аккумуляторов в полевых условиях, ввиду отсутствия такой возможности.
Кроме того, грузоподъёмность мультироторных систем оставляет желать лучшего. Они вполне годятся для перевозки небольших грузов, однако стоимость системы, которая сможет стать полноценным средством передвижения или перевозки пассажиров, будет достаточно внушительной. Справедливости ради, однако, следует отметить, что в последнее время начинают практически реализовываться идеи некоего летающего городского такси, которое как раз будет построено на основе мультироторной электрической системы.
Однако, как уже было сказано ранее, мультироторные системы появились не вчера, изначально они представляли собой исключительно системы на двигателях внутреннего сгорания.
И не так давно, в середине 2023-х годов появилось достаточно интересная система, которая «возвращалась к истокам» и представляла собой квадрокоптер бензинового типа — Nitro Stingray.
В отличие от своих электрических собратьев, эта система в своей основе имела в качестве силовой установки двигатель внутреннего сгорания, от которого крутящий момент передавался на все четыре несущих ротора:
Этот квадрокоптер отличался тем, что он имел один центральный двигатель, а присущая мультикоптерам подвижность,- обеспечивалась четырьмя винтами, с изменяемым шагом:
Ввиду высокой энергоёмкости сжигаемого топлива, этот квадрокоптер имел относительно небольшой вес, если сравнивать его с электрическими собратьями, высокую удельную грузоподъёмность, а также подвижность, о чём было сказано ранее.
В это же десятилетие отметились несколько известных проектов, которые пытались решить проблему недостаточной грузоподъёмности электрических устройств таким же путем, — использованием центрального двигателя и передачи крутящего момента, в то время как управление осуществлялось регулировкой шага винтов.
Одним из таких проектов является проект Incredible HLQ (Heavy Lift Quadcopter), который даже запускал свою кампанию на kickstarter com.
Вот что говорили о нём его создатели:
«Мы — группа студентов-механиков, работающих над нашим главным проектом в Государственном университете Сан-Хосе в Сан-Хосе, Калифорния. В состав группы входят 4 участника: Ник Коновер, Крис Фулмер, Карлос Герреро и Габриэль Теллез. Каждый из нас обладает особым набором навыков и специализируется в 2 различных дисциплинах: мехатроника и конструирование.
Мы проектируем и строим квадрокоптер с большой грузоподъёмностью (HLQ), который мы называем Incredible HLQ (звучит как «Халк»). Как и супергерой, HLQ сможет поднимать и транспортировать огромное количество веса для своего размера и стоимости. HLQ сможет автономно извлекать и доставлять 50 фунтов (~22,7 кг) полезной нагрузки.
Чтобы достичь цели в 50 фунтов, HLQ будет использовать трансмиссию, приводимую в действие двумя бензиновыми двухтактными двигателями мощностью около 12,5 л.с. каждый. Подъём будет осуществляться с помощью четырёх головок несущего винта коммерческого радиоуправляемого вертолёта с четырьмя лопастями диаметром 435 мм. Выбор этих лопастей был основан на реальных испытаниях подъёмной силы на нашем испытательном стенде, которые показаны в видео. Управление достигается за счёт использования управления переменным шагом винтов для изменения подъёмной силы каждого ротора.
Управление полётом будет использовать модуль DIYDrone Ardupilot APM2.5 . Ardupilot — это плата управления на базе Arduino с открытым исходным кодом для БПЛА. Он широко используется для многих летательных аппаратов с неподвижным крылом, вертолётов и многороторных летательных аппаратов и имеет подтверждённый послужной список.
Кроме того, мы будем использовать систему компьютерного зрения для идентификации и отслеживания полезной нагрузки с помощью библиотеки OpenCV на Roboard RB-110. RB-110 — это полноценный компьютер на одной плате. Он имеет 486-совместимый процессор с тактовой частотой 1 ГГц и может работать под Windows, Linux или Dos.
HLQ — дорогостоящий проект для большинства старших инженерных проектов в SJSU (Государственный университет Сан-Хосе). Затраты выходят за рамки того, что мы, студенты, можем себе позволить, и поэтому ваша поддержка имеет решающее значение для нашего успеха».
У проекта есть свой канал на YouTube, где они публикуют последние новости о разработках.
Несмотря на большое количество затраченного времени, в данный момент проект всё также находится в стадии разработки, последнее видео о новостях проекта вышло в мае 2020 года:
Ещё одним достаточно известным проектом является Goliath Mkll.
Проект стартовал примерно в то же время, что и первый, также в 2023 году и имеет свой канал на YouTube, но так же как и первый проект, — до сих пор находится в стадии разработки:
Достаточно долгое время идея бензиновых грузоподъёмных мультироторных систем пребывала в запустении, в течение всего десятилетия 2023-х. По крайней мере, не было ничего особо заметного, что бы громко заявило о себе в блогосфере или интернете в целом.
Однако, в последние 3-4 года, ситуация похоже сдвинулась с мёртвой точки, — разработчики похоже учли сложность создания системы с изменяемым шагом винтов, и пошли другим путём: один за другим стали появляться проекты, которые сочетают в себе преимущества двух подходов,- электрического и бензинового.
Как правило, эти проекты построены приблизительно по одной и той же схеме: классическая мультироторная система, где несущие роторы базируются на основе электрических двигателей, в то время как источником энергии для питания системы являются не аккумуляторы, а используется портативная бортовая электростанция внутреннего сгорания — для выработки электроэнергии.
Такого типа дроны позиционируются как средства для опыления полей от вредителей. Ввиду своей грузоподъёмности и большого времени работы, они могут брать на борт большой бак с жидкими инсектицидами и работать долгие часы, проходя большую площадь.
Хотя, кое-кто развивает и альтернативные технологии. Как, например, проект ниже, о котором, к сожалению, ничего не известно, кроме технических характеристик, показанных в видео. Мультикоптерная система, предположительно, имеет синхронизирующие валы между парами отдельных двигателей, для выравнивания их скоростей, проходящие внутри труб — каркаса. А управление осуществляется наклоном каждого конкретного двигателя:
В качестве заключения:
Некоторое время назад, вышло видео, где сноубордист, прицепленный к квадрокоптеру, катается на фоне заснеженных ландшафтов:
Неожиданный подход, продемонстрированный в видео, произвёл впечатление на многих и широко разошёлся по блогосфере. Однако любой, более-менее близко знакомый с технической стороной «коптеростроения», понимает, что построение подобного коптера, — обойдётся в круглую сумму!
Но благодаря продемонстрированному строителями сельскохозяйственных коптеров подходу, данная затея уже не кажется такой безумной!
Предположим некий мультикоптер, который может поднимать человека, построенный по электрической схеме, и питающийся от бортовой электростанции. Ввиду мультироторной схемы, такой коптер будет обладать высокой подвижностью, в то же время, обладая высокой грузоподъёмностью, что позволит использовать его для такого интересного применения как дрон-бординг (катание за дроном, на прицепе)! Или скажем, в качестве манёвренного мощного дрона, для доставки грузов.
Для снижения шума от работы двигателя бортовой электростанции, дрон может лететь на большой высоте, поэтому это не будет проблемой.
Стартап? Why not…

Беспилотники армии россии
Конечно самым известным беспилотником эпохи СССР является советский многоразовой орбитальный корабль-ракетоплан «Буран», совершивший беспилотный полет и посадку. Но этот беспилотник, давно затерялся во времени, и современное Российское авиастроение БПЛА ориентируется сейчас на передовой западный опыт.
Беспилотники всегда позиционировались как изделия двойного назначения, поэтому, в отсутствии российских производителей, особо серьезно стоит вопрос приобретения предприятиями нашей страны высокотехнологичных компонентов из западных стран, особенно в условиях постоянных санкций.
Для решения вопроса вооружения армии современной техникой, в 2009 году Россия заключила с израильской компанией Israel Aerospace Industries (IAI) контракт на покупку беспилотных летательных аппаратов. А для уменьшения отставания в производстве беспилотной техники, в 2023 году российская компания «Оборонпром», входящая в состав госкорпорации «Ростехнологии», подписала с той же израильской компанией IAI контракт, по которому в России будет создано совместное предприятие по сборке беспилотных летательных аппаратов.

БПЛА «Форпост» аналог Израильского дрона Searcher

БПЛА «Орлан-10»
В Российской армии разнообразен ассортимент беспилотных аппаратов малого веса, применяемых для сбора разведывательных данных на местности.
Первенцем был БПЛА «Застава» – прототип БПЛА IAI Bird Eye 400 израильского производства – спроектированный на ОАО «Уральский завод гражданской авиации». Конструкция устройства была адаптирована под выполнение военных задач и оптимизирована в техническом плане, что обеспечило устройству высокие эксплуатационные характеристики.
Силовую часть БПЛА «Застава» представляет электрический двигатель, который способен поддерживать полёт устройства до одного часа, при этом, максимальная скорость перемещения составляет 100 кмч.

БПЛА «Застава»
Российский многофункциональный БПЛА модели «Гранат-4» обладает компактной конструкцией фюзеляжа. При длине в 2 метра 60 сантиметров, размахе крыльев 3 метра 20 сантиметров, при массе в 30 килограмм, модель очень простота в эксплуатации.
Лётно-технические характеристики БПЛА «Гранат-4»
- Длина: 2,6 м.;
- Размах крыльев: 3,2 м.;
- Высота: 0,45 м.;
- Максимальная взлётная масса: 30 кг.;
- Крейсерская скорость полёта: 90 кмч.;
- Максимальная скорость полёта: 140 кмч.;
- Максимальная дальность полёта: 100 км.;
- Максимальная высота полёта: 4000 м.;
- Тип авиадвигателя: поршневой;
- Силовая установка: неизвестно;
- Мощность: неизвестно.

БПЛА «Гранат-4»
С начала 2023 года отмечается использование в Сирии семидесяти российских беспилотных летательных аппаратов, в числе которых:
БПЛА «Форпост», БПЛА «Орлан» 10, БПЛА «Элерон-3», БПЛА «Пчела-1Т»,
БПЛА «Дозор-100», БПЛА «Орион».
Лётно-технические характеристики БПЛА «Дозор-100»
- Размах крыла, м 5.40
- Длина, м 3.00
- Высота, м 1.10
- Масса, кг
- максимальная взлетная 95
- топлива 24
- Тип двигателя 1 ПД 3W210
- Мощность, л.с. 1 х 21
- Крейсерская скорость, км/ч 120-150
- Практическая дальность, км 1200
- Продолжительность полета, ч

БПЛА «Дозор-100», производства АО «Кронштадт»
Лётно-технические характеристики БПЛА «Орион»
- Размах крыльев – 16 метров,
- длина аппарата – 8 метров,
- взлетная масса – 1000 кг,
- максимальная масса полезной нагрузки – 200 кг,
- продолжительность непрерывного полета – не менее 24 часов,
- может подниматься на высоту 7500 метров.

БПЛА «Орион», производства АО «Кронштадт»
«ВРТ-300» – российский многоцелевой беспилотный летательный аппарат двойного назначения, разработанный холдингом «Вертолёты России». Беспилотник первые был представлен на «МАКС-2023». Несмотря на высокотехнологичность этот летательный аппарат оказался недорогим. Планируется запуск серийного производства для активного применения дрона в гражданских сферах.
Лётно-технические характеристики БПЛА «ВРТ-300»
- Длина: неизвестно;
- Диаметр несущего винта: неизвестно;
- Высота: неизвестно;
- Максимальная взлётная масса: неизвестно;
- Крейсерская скорость полёта: 120 кмч.;
- Максимальная скорость полёта: 180 кмч.;
- Максимальная дальность полёта: 150 км.;
- Максимальная высота полёта: 2100 м.;
- Тип авиадвигателя: поршневой;
- Силовая установка: неизвестно;
- Мощность: неизвестно.

БПЛА «ВРТ-300»
Хотя по своим характеристикам некоторые БПЛА армии России уступают зарубежным аналогам. Развитие отрасли БПЛА в России идет нарастающими темпами. И есть уверенность, что в этой области, как в военной авиации, ракетостроении, танкостроении, Россия будет на первом месте.
Все фотографии к обзору взяты из открытых интернет-источников.
Количество моторов
Мультикоптеры условно разделяются на несколько категорий, причем по разным признакам. Например, их можно классифицировать по количеству пропеллеров (двигателей). Такие аппараты носят разные названия, начало которых — числительное из греческого языка: три-, квадро-, гекса- и октокоптеры имеют три, четыре, шесть и восемь лопастей соответственно.
От количества моторов обычно зависят все прочие характеристики, каждая из которых может быть самостоятельным классификатором: масса, размеры (диаметр выброса лучей), грузоподъемность, скорость — все эти показатели растут вместе с количеством моторов. Как правило.
Но есть и исключения. Например, некоторые «комнатные», почти безопасные мини-устройства, умещающиеся на ладони или чуть крупнее, также оснащены четырьмя пропеллерами (а бывают и шестилопастные мелкодроны!). Кстати, многие из них даже оснащены микрокамерами — этакая селфи-палка-леталка.
Но это не более чем игрушка, которую не жаль подарить мальчишке детсадовского возраста. Причем вовсе не обязательно ожидать мгновенной поломки подаренного дрона вследствие аварии (которая непременно случится при первой же попытке взлететь), потому что среди недорогих дронов можно отыскать сверхлегкие защищенные модели, не боящиеся падений, ударов, а иногда и воды.
Вторая крайность — шести- и восьмилопастные аппараты, которые относятся к профессиональному сегменту беспилотников, поскольку позволяют поднимать серьезный груз. И это уже совсем не игрушка. Эксплуатация таких аппаратов сопряжена с большими расходами и риском: в рюкзак или сумку их не положишь, а значит, стои́т вопрос транспортировки до полетной зоны и обратно.
В их конструкции сложно и дорого буквально всё — от усиленной рамы до большого количества датчиков, иногда дублированных, показания которых анализируются мудреным программным обеспечением. Более того, чтобы приспособить к коптеру полноразмерную камеру, недостаточно примотать ее синей изолентой.
Для крепления камер используются специальные многоосевые стабилизирующие подвесы, управление которыми — а значит, и камерой — производится отдельно от радиоканала управления полетом. Наконец, для управления самой камерой — запись, зум, фокус и прочие настройки — также требуется отдельная полоса связи и обслуживающие ее элементы. Следовательно, нужен второй человек, который осуществляет съемку — оператор.
По этим причинам не хочется затрагивать аспекты, относящиеся к профессиональным мультикоптерам. Да, сегодня без них не обходится ни одна экстренная или ремонтная служба, ни одна телекомпания или агентство (про вооруженные силы многозначительно промолчим).
Например, связистам и энергетикам гораздо проще и выгоднее осмотреть мультикоптером свои вышки и линии электропередачи, чем отправлять на травмоопасную работу дефицитных верхолазов. А телевизионщикам или киношникам для съемки красивостей теперь не требуется нанимать настоящий вертолет, час работы которого обходится в нечеловеческую сумму.
Таким образом, выбор дрона для любительского применения имеет смысл ограничить самой распространенной ветвью — квадрокоптером средних размеров и массы. Не зря именно такие устройства составляют подавляющее большинство беспилотных летательных аппаратов, предлагаемых сегодня на рынке.
Такая популярность объясняется четырехлучевой конструкцией, которая оказалась оптимальной по цене и сложности изготовления. Она позволяет переносить небольшие грузы (в большинстве случаев — мини-камеру), обеспечивая при этом неплохую динамику подъема и перемещения.
С длительностью пребывания в воздухе у них всё тоже обстоит неплохо: некоторые модели могут летать до получаса без подзарядки или замены аккумулятора. Но конечно же, их функциональность, а значит, и возможности коптера, сильно зависит от цены. Которая может отличаться на порядки.
Программное обеспечение
Теперь коснемся такого важного аспекта, как программное обеспечение. Очевидный факт: чем дороже аппарат, тем продуманнее и функциональнее его софт. Речь не о ПО, составляющем мозг коптера, в которое лезть запрещено. Имеется в виду пользовательское приложение или несколько приложений под разные платформы, с помощью которых осуществляется настройка, управление, просмотр видеотрансляции, задается целеуказание и происходит иное «общение» с коптером.
Рассмотрим такое ПО на примере приложения, которым комплектуется квадрокоптер Xiaomi Mi Drone 4K. Популярность этого аппарата объясняется его невысокой стоимостью и наличием продвинутых характеристик: долгое время полета, программируемые режимы и высококачественная камера с разрешением 4K.
Это, конечно, не идеал функциональности, однако можно не сомневаться: даже такой скромный набор возможностей используется большинством пилотов разве что наполовину.
К примеру, оператор может дать коптеру несколько разных команд: автоматический взлет и приземление, полет по заданному маршруту, полет к объекту на карте, облет объекта по кругу, отлет от объекта с уходом вверх и т. д.
Минус этих функций заключается в том, что все эти команды можно дать лишь во время работы двигателей, то есть когда дрон уже находится в воздухе на автопилоте в режиме зависания. Но беда в том, что запас аккумулятора во время полета тает буквально на глазах.
Следующие функции должны присутствовать в приложении для каждого серьезного коптера: настройки камеры (экспозиция, разрешение при съемке и т. д.), отображение карты с указанием местонахождения.

В хорошем приложении обязательно имеются и другие функции, так называемые «офлайновые», которые могут быть востребованы не в полете, а позже. Это просмотр и «расшаривание» записанных фото- и видеоматериалов, просмотр статистики по полетам. Есть даже возможность просмотра подробнейших логов, которые ведутся при каждом взлете и автоматически сохраняются, как это делается «черными ящиками» самолетов и вертолетов.

Убедиться в наличии подобных функций можно, не только изучив руководство пользователя, но и почитав тематические форумы. Последние содержат в сотни раз больше полезной информации, чем скупые и лаконичные официальные источники.
Прочие трудности, секреты и загвоздки будут раскрыты лишь со временем. Например, такие, как проблема аккумуляторов. Любому владельцу коптера крайне желательно всегда иметь запасную батарею, хотя бы одну. Этим не только увеличивается время загородных полетушек, но и экономится ресурс батарей.
Например, за год эксплуатации дрона с одной батареей (около 60 км налета) ее общая емкость упала как минимум на треть, теперь ни о каких 27 паспортных минутах нет и речи — время полета снизилось до 15 минут. Но фирменное приложение эту «мелочь», к сожалению, не показывает.


