

- Что такое промышленный робот
- Современные роботы и что с ними не так
- Что такое сервисный робот
- Что такое кобот
- «зловещая долина» роботов
- Три поколения роботов [1978 Тимофеев А.В. – Роботы и искусственный интеллект]
- Варианты передвижения робота на колесах
- Движение по окружности произвольного диаметра
- Движение робота тележки ev3 по криволинейной траектории
- Как будут развиваться роботы
- Классификации роботов
- Классы роботов.edit
- Компоненты роботов.edit
- Краткая история роботизации
- Области применения промышленных роботов
- Поворот вокруг одного колеса
- Разворот на месте
- Расчет числа оборотов
- Робот за 3 минуты
- Системы управления.edit
- Способы перемещения.edit
- Три поколения роботов
- Яркие исторические робоперсонажи
Что такое промышленный робот
Промышленный робот состоит из манипулятора, в том числе приводов, и контроллера, включая пульт обучения и аппаратный или программный коммуникационный интерфейс. Манипулятор робота можно программировать по трем или более степеням подвижности в зависимости от задач автоматизации.
Проще говоря, промышленная робототехника предназначена для выполнения основных и вспомогательных операций производственного цикла без участия человека. По данным аналитического отчета Сбербанка, на сегодня на производстве задействовано около двух миллионов роботов.
Общая классификация промышленных роботов содержит от 7 до 12 классификационных признаков (в зависимости от информационного источника). Вот несколько примеров частных классификаций по наиболее важным признакам.
По характеру выполняемых операций промышленные роботы делятся на:
- технологические (выполняют основные операции — обработку, сборку, сварку, окраску);
- вспомогательные (используют для обслуживания основного технологического оборудования: установка — снятие заготовок, транспортно-складские и другие операции);
- универсальные (сочетают признаки первых двух групп).
По характеру обработки программы промышленные роботы могут быть:
- жесткопрограммируемые (программа действий содержит информацию, не меняющуюся в процессе работы);
- адаптивные (содержат информацию об объектах и условиях внешней среды. Сенсорное оснащение позволяет таким роботам корректировать управляющую программу);
- гибкопрограммируемые (способны формировать программу своих действий на основе поставленной цели и информации об объектах и условиях внешней среды).
Современные роботы и что с ними не так
Со дня появления Мистера Телевокса прошло 90 лет. Технологии за это время совершили колоссальный рывок, а человекоподобные роботы как были, так и остались развлекательным или информационным устройством с очень ограниченной сферой применения.
Что такое сервисный робот
Сервисная робототехника делится на два типа — для личного применения (роботы-пылесосы, развлекательные роботы, роботы-помощники) и для профессионального, то есть для оказания различных услуг (полевая, подводная робототехника, медицина, мониторинг и эксплуатация, строительство и снос, логистические системы, мобильные платформы, военные роботы, подводные системы, силовые экзоскелеты и так далее).
Что такое кобот
Коллаборативный робот (кобот) — это вариант промышленного робота, который также состоит из манипулятора и перепрограммируемого устройства управления. Кардинальное отличие кобота в том, что он может работать совместно с человеком для создания или производства различных продуктов.
Первого кобота изобрели в 1999 году Эд Колгейт и Майкл Пэшкин, инженеры Северо-Западного университета. Большинство коллаборативных роботов имеют небольшие размеры (вес — 15-20 кг, в некоторых случаях — до 50 кг, высота — около 1,5 м).
Согласно международному стандарту ISO 10218, есть четыре типа коллаборативных роботов:
- с защитным механизмом остановки; когда при приближении человека кобот считывает движение с помощью датчиков и останавливается, пока человек не уйдет из рабочего пространства;
- с ручным управлением; робот дополнен специальными устройствами, распознающими давление руки. Когда робот не обучается, а выполняет свои прямые функции, человек должен находиться за границами его рабочей зоны;
- с системой «компьютерного зрения», которые отслеживают перемещения работников-людей и замедляются до безопасной скорости или вообще останавливаются при приближении человека;
- с ограничением силы; если робот чувствует сильное сопротивление на пути, он останавливается.
Основная сфера применения коботов — автомобилестроение и производство электроники, а самыми популярными операциями являются погрузка/перемещение и сборка.
Кобот YuMi от ABB
«зловещая долина» роботов
Элементы человеческой внешности, то есть кожа, глаза, волосы, не являются необходимыми для робота, они — не более чем украшение для повышения привлекательности механизма. Большинство антропоморфных роботов представляют собой голый «скелет» (см. случаи российского Фёдора, Atlas от Boston Dynamics, Honda Asimo).
Этим термином обозначается эффект, при котором объекты, выглядящие и действующие как люди, вызывают у наблюдателей отвращение — так как недостаточно на них похожи. Название эффекта произошло от провала на графике, представленном в исследовании японского учёного Масахиро Мори.
Тот в 1978 году провёл опрос, показавший, что в определённый момент похожесть робота на человека уже не привлекает, а отталкивает. Общепринятого объяснения этому психологическому механизму до сих пор не существует. Предполагается, что человек неосознанно замечает внешние отклонения других людей от некой привычной нормальности.
Три поколения роботов [1978 Тимофеев А.В. – Роботы и искусственный интеллект]
Историю развития роботов в настоящее время принято делить на поколения. Надо сразу же сказать, что это деление весьма условно. Идея делить роботы на поколения вызвана к жизни тем, что за время короткой истории своего развития роботы претерпели большую эволюцию как в смысле элементной базы, на которой они строятся, так и особенно в смысле изменения их структуры, появления новых функций и возможностей, расширения областей их применения, характера использования.
Роботы первого поколения – это роботы с программным управлением (программные роботы). Эти роботы в основном предназначены для выполнения определенной жестко запрограммированной последовательности операций, диктуемой тем или иным технологическим процессом. Управление роботами первого поколения осуществляется по заранее заданной программе, а значит, и при строго определенных и неизменных условиях функционирования. Простота изменения программы, т. е. возможность переобучения роботов первого поколения новым операциям, сделала эти роботы достаточно универсальными и гибко перестраиваемыми (правда, с помощью человека-оператора) на различные классы задач в пределах функциональных возможностей данного робота.
Первые программные роботы были созданы и освоены промышленностью в шестидесятых годах. Техническое осуществление таких роботов основывается, как мы увидим в следующей главе, на различных принципах и элементах. В настоящее время существует около 300 типов программных роботов (из них более 100 – в Японии, около 30 – в США, остальные – в странах Западной Европы и в СССР).
Область возможных (и экономически целесообразных) применений роботов первого поколения достаточно широка. Эти роботы успешно применяются для обслуживания станков (в частности, станков с цифровым программным управлением), печей, прессов, технологических линий, сварочных аппаратов, литейных машин и т. п. Они осуществляют установку, транспортировку, упаковку изделий, простейшие сборочные операции, сварку, ковку, литье под давлением, термическую и механическую обработки и т. п. Особенно широко программные роботы применяются в машиностроении, металлургии и атомной промышленности.
Следует отметить, однако, что функциональные возможности роботов первого поколения существенно ограничиваются малым ассортиментом информационно-измерительных датчиков и несовершенством управляющей системы, служащей лишь для осуществления заранее заложенной в памяти жесткой программы. Способность к восприятию внешнего мира и к формированию его модели у роботов первого поколения практически отсутствует. Поэтому эти роботы принципиально не могут функционировать совершенно самостоятельно (автономно), без вмешательства человека. Упомянутые ограничения привели к тому, что в последнее время особую актуальность приобрели научно-исследовательские и опытно-конструкторские разработки по созданию следующего, более совершенного поколения роботов.
Роботы второго поколения – это очувствленные роботы. Они отличаются от программных роботов, во-первых, существенно большим ассортиментом сенсорных датчиков, как внешних (телевизионные, оптические, тактильные, локационные датчики и т. п.), так и внутренних (датчики положений “руки” или “ноги” относительно “тела” робота, датчики усилий и моментов и т. п.) и, во-вторых, более сложной системой управления. Последняя уже не ограничивается только устройством для запоминания жесткой программы движения, как у роботов первого поколения, а требует для своей реализации управляющей ЭВМ.
Технические “органы чувств” роботов второго поколения служат источниками сигналов обратных связей для управляющей системы. Эта система и формирует закон управления исполнительными механизмами робота (манипулятором, органами перемещения и т. п.) с учетом фактической обстановки. Такое управление реализуется путем формирования связей типа “класс ситуаций – действие”, которые либо заранее закладываются в память управляющей системы, либо формируются в процессе обучения робота человеком. При этом под “ситуацией” понимается набор значений сигналов па выходе сенсорной системы, а под “классом ситуаций” – множество “ситуаций”, обладающее тем свойством, что все “ситуации” из одного класса требуют одного и того же “действия”, адекватного этому “классу ситуаций”. “Действием” является программа движения, которая, как и в роботах первого поколения, заранее задается (заносится в память управляющей системы). В случае существенного изменения “ситуации”, соответствующего переходу из одного “класса ситуаций” в другой, меняется и “действие”, т. е. программа движения.
Описанная схема управления напоминает схему выработки условных рефлексов у человека и животных. Поэтому поведение очувствленного робота мы можем условно назвать рефлекторным. Подчеркнем, что именно наличие связей “класс ситуаций – действие” позволяют очувствленному роботу приспосабливать свое поведение к реально складывающейся и даже меняющейся (правда, в довольно ограниченных пределах) обстановке.
Интересно отметить, что соотношения между отдельными “органами чувств”, их техническими характеристиками, относительной значимостью и взаимодействием у роботов существенно иные, чем у человека. Более того, очувствленные роботы могут обладать и “сверхчувствительными” органами чувств, способными воспринимать сигналы, недоступные для органов чувств человека. При этом способы обработки сенсорной информации могут существенно отличаться от таковых в живой природе. Так, например, у очувствленных роботов относительное значение зрения и слуха может быть (например, при глубоководных исследованиях) значительно меньше, чем у человека, а роль тактильных датчиков, наоборот, – больше и, кроме того, могут использоваться разнообразные нечеловеческие “органы чувств” (ультразвуковые датчики, приборы ночного видения, магнитометры и т. п.).
Неотъемлемой частью роботов второго поколения является их алгоритмическое и программное обеспечение, т. е. комплекс алгоритмов, и программ, предназначенных для обработки сенсорной информации и выработки управляющих воздействий. Необходимость развития алгоритмического и программного обеспечения очувствленных роботов обусловлена главным образом расширением класса решаемых задач и, следовательно, сферы применения роботов. Имеются все основания считать, что доля затрат на алгоритмическое и программное обеспечение очувствленных роботов будет увеличиваться по сравнению с затратами на разработку самих вычислительных средств управления, так как структура и функции последних в известной мере стабилизировались. В то же время функциональные возможности очувствленных роботов, определяемые их алгоритмическим и программным обеспечением, могут быть существенно расширены путем наращивания программ “класс ситуаций – действие”.
Роботы второго поколения, оснащенные большим ассортиментом сенсорных датчиков и управляющей ЦВМ, значительно превосходят по своим функциональным возможностям программных роботов. Благодаря способности воспринимать изменения во внешней среде, анализировать сенсорную информацию и приспосабливаться к существующим условиям функционирования, очувствленные роботы могут работать с неориентированными деталями произвольной формы, осуществлять сборочные и монтажные операции, собирать информацию о неизвестной и, возможно, меняющейся внешней среде и т. п.
Однако очувствленные роботы, вообще говоря, не должны заменить роботы первого поколения. Оба поколения роботов взаимно дополняют друг друга, выполняя действия различной сложности при различной степени информированности о внешней среде. Их совокупность позволяет автоматизировать подавляющее большинство ручных и транспортных операций в сфере промышленного и сельскохозяйственного производства.
В настоящее время роботы второго поколения еще не выпускаются серийно ни в СССР, ни за рубежом. Однако в ряде промышленно развитых стран ведутся интенсивные исследования по разработке алгоритмического, программного и технического обеспечения очувствленных роботов и отработке их экспериментальных образцов. Предполагается, что роботы второго поколения будут освоены промышленностью в ближайшие годы.
Следующее, третье поколение роботов – это так называемые интеллектуальные, или разумные, роботы. Они принципиально отличаются от роботов второго поколения сложностью и совершенством управляющей системы, включающей в себя элементы искусственного интеллекта. Необходимо подчеркнуть, что интеллектуальные роботы предназначены не только и не столько для имитации физических действий человека, сколько для автоматизации его интеллектуальной деятельности, т. е. для решения интеллектуальных задач.
Характерной особенностью интеллектуальных роботов является их способность к обучению и адаптации в процессе решения задач. Что же касается самого умения решать интеллектуальные задачи, то оно является производным в том смысле, что целиком зависит от того, как протекал процесс обучения и адаптации робота.
Существуют различные возможности придать очувствленному роботу те или иные элементы искусственного интеллекта. Структура и совершенство управляющих систем интеллектуальных роботов определяются, с одной стороны, техническими возможностями реализации нужных (с точки зрения решаемой задачи) элементов интеллекта, а с другой – содержанием и сложностью задач, которые перед роботом ставит человек.
В общем случае интеллектуальный робот способен понимать язык и вести диалог с человеком, формировать в себе модель внешней среды (с той или иной степенью детализации), распознавать и анализировать сложные ситуации, формировать понятия, планировать поведение, строить программные (желаемые) движения исполнительной системы и осуществлять их надежную отработку в условиях неполной информированности о характеристиках среды, робота и условий его функционирования. Следует отметить, однако, что в настоящее время реальные потребности в интеллектуальных роботах пока еще не созрели, хотя целесообразность их создания признается многими учеными. Если роботы второго поколения уже сейчас необходимы для ряда научно-технических разработок (в частности, для космических и глубоководных исследований), а в ближайшем пятилетии начнут применяться в промышленности, то роботы третьего поколения пока не вышли из лабораторий. По мнению президента крупнейшей роботостроительной фирмы “Юнимейшн” Д. Энгельбергера первые промышленные образцы интеллектуальных роботов могут появиться не раньше 1980 г.
Почему же ученые и инженеры, уже давно понимающие принципиальную возможность создания интеллектуальных роботов, до сих пор их не создали?
Казалось бы, использование универсальной управляющей ЭВМ в качестве “мозга” роботов в сочетании с искусственными органами чувств должно привести (по крайней мере, потенциально) к некоему всемогуществу роботов. Действительно, если создать элементы искусственного интеллекта в форме программного обеспечения универсальной управляющей ЭВМ, то робот сможет воспроизвести практически любой вид человеческой деятельности. Конечно, чем сложнее деятельность, тем сложнее соответствующее программное обеспечение и тем больше времени потребуется для реализации целенаправленного поведения робота. По существу, отсюда следует: дайте нам достаточно большую память и большое быстродействие управляющей ЭВМ, а также достаточно большой ассортимент “органов чувств” – и мы сделаем интеллектуального робота.
Можно сказать, что робототехника (точнее, кибернетика как теоретическая основа робототехники) выдала крупный вексель. Однако до сих пор он в значительной степени еще не оплачен. И в основном не потому, что мало быстродействие, недостаточен объем памяти или узок ассортимент сенсорных датчиков современных роботов. Причина в другом – не хватает идей. Идей о способах построения программ для имитации сложного поведения человека в разнообразных обстоятельствах.
В чем же причины трудностей?
Мы уже говорили, что очень легко составить жесткую программу движения для роботов первого поколения. Реализация такой программы обеспечивает выполнение одной и той же последовательности операций, если среда, в которой функционирует робот, строго организована и неизменна.
Иначе обстоит дело в случае, когда при разных обстоятельствах от робота требуется разный порядок операций. Однако сложность возрастает ненамного, если заранее четко сформулировать, чем должен определяться выбор следующего действия в тех или иных ситуациях. Например, чтобы произвести заданную последовательность технологических операций с объектами, окрашенными в разные цвета, нужно перед каждой операцией выбирать объект нужного цвета. Для решения подобного рода задач служат очувствленные роботы.
Существенные трудности возникают в тех случаях, когда нельзя заранее решить, чем должен определяться выбор порядка операций у робота. Во многих конкретных задачах положение осложняется тем, что сам принцип такого выбора зависит от многих обстоятельств, а характер зависимости тоже не может быть заранее указан и поэтому должен определиться в результате рассмотрения некоторых других обстоятельств. В то же время метод рассмотрения этих обстоятельств нельзя задать одним и тем же на все случаи жизни робота – он должен выбираться роботом в зависимости от специфических особенностей решаемой задачи.
Ясно, что все это не может быть осуществлено с помощью проблемно-ориентированных программ типа “класс ситуаций – действие”, используемых в роботах второго поколения, и требует создания специальных “надпроблемных” программ, которые мы будем называть метапрограммами. Метапрограммы служат не только и не столько для реализации отдельных элементов интеллекта, сколько для организации их совместной работы.
Именно метапрограммы придают роботу способности решать множество задач, требующих привлечения интеллекта, и адаптироваться (приспосабливаться) к разнообразным и даже неизвестным условиям функционирования. Интересно отметить, что поведение подобного интеллектуального робота, управляемого метапрограммами, будет выглядеть вовсе “не машинным”. Его действия будут настолько сложно зависеть от огромного множества обстоятельств (в том числе и далеко отстоящих во времени), что внешне будет полная иллюзия “свободы воли” в целенаправленной деятельности робота.
Эволюция роботов вовсе не означает, что одно поколение роботов последовательно приходит на смену другому. На самом деле это не так, хотя определенная преемственность имеется. Как мы видели, эволюционный процесс совершенствует функциональные возможности и технические характеристики роботов от поколения к поколению. Однако при этом каждое поколение роботов представляет собой семейство роботов различных типов, предназначенных для решения разнообразных прикладных задач.
Варианты передвижения робота на колесах
В общем случае робот может передвигаться прямолинейно и по ломанной траектории. Вычислить передвижение робота на необходимое расстояние по прямой достаточно просто. Для этого должен быть известен диаметр колеса робота. Исходя из этих начальных условий можно вычислить точное количество оборотов колеса, необходимое для преодоления заданного расстояния.
Движение по окружности произвольного диаметра
Пусть расстояние от центра окружности до середины первого колеса будет R1. Расстояние от центра окружности до середины второго колеса R2.
В этом случае мы получаем движение колес по окружностям разного диаметра за одинаковое время. Регулировать такое передвижение можно за счет разности скоростей внешнего и внутреннего колеса.
Длина окружности, которую проезжает правое колесо обозначим как L1
L1 = 2 * π * R1
Длина окружности для левого колеса
L1 = 2 * π * (R1 R2)
Скорость правого колеса V1, а скорость правого колеса V2.Время за которое заданное расстояние пройдет правое колесо t1.
t1 = L1 / V1 = (2 * π * R1) / V1
Время, за которое заданное расстояние пройдет левое колесо t2.
t2 = L2 / V2 = (2 * π * (R1 R2)) / V2
 Время проезда окружности или ее части левым и правым колесом у нас одинаковое t = t1 = t2, а значит и правые части выражений равны.
Время проезда окружности или ее части левым и правым колесом у нас одинаковое t = t1 = t2, а значит и правые части выражений равны.
L1 / V1 = L2 / V2 ó (2 * π * R1) / V1 = (2 * π * (R1 R2)) / V2 ó
Упрощаем выражение и получаем следующую пропорцию
V2/ V1 = (R1 R2) / R1
Сейчас можно вычислить скорости левого и правого колеса для заданной окружности. Пусть у нас R1 = 20 см и R2 = 20 см, для упрощения скорость левого колеса возьмем 100 условных единиц. Тогда
V2 / V1 = (R1 R2) / R1 ó 100 / V1 = (20 20) / 20
100 / V1 = 2 ó V1 = 100 / 2 ó V1 = 50 условных единиц.
Имея вычисленные значения скоростей можно составить программу прохождения участка. Для робота Lego EV3 можно использовать блок программирования «Независимое управление моторами». Скорость левого двигателя устанавливаем 100 у.е., скорость правого двигателя устанавливаем 50 у.е.
Режим устанавливаем «Включить на количество секунд». Произвольно установим 10 секунд. Для того, чтобы точно проходить заданное расстояние нужно замерить время прохождения одного круга секундомером. Зная это время можно задавать нужное нам расстояние.
Часто на соревнованиях одним из заданий является движение робота по черной линии с объездом препятствий. И для успешного преодоления трассы необходимо вычислить траекторию объезда. При помощи таких вычислений это сделать достаточно легко.
Движение робота тележки ev3 по криволинейной траектории
В общем случае робот может передвигаться по траектории, которая представляет из себя окружность, часть окружности и комбинации различных частей окружности. При этом робот может:
- Разворачиваться на месте – колеса робота крутятся в разные стороны с одинаковой скоростью;
- Разворачиваться вокруг одного колеса – одно колесо машинки Lego EV3 стоит на месте, другое крутится с заданной скоростью;
- Описывать произвольную окружность – оба колеса крутятся в одном направлении с разной скоростью.
Пусть параметры тележки EV3 будут такими: робот представляет из себя платформу с двумя колесами и шаровой опорой, расположенной сзади. Тележка симметрична и расстояние между центральными осями колес и шаровой опорой является равнобедренным треугольником.
 Для упрощения расчетов, задам расстояние между центрами колес по оси, но которой они расположены равным 20 см. На многих соревнованиях по робототехнике одним из условий являются габариты робота. Например, нужно чтобы размеры робота были не более 20 см в ширину, 20 см в длину и 20 см в высоту.
Для упрощения расчетов, задам расстояние между центрами колес по оси, но которой они расположены равным 20 см. На многих соревнованиях по робототехнике одним из условий являются габариты робота. Например, нужно чтобы размеры робота были не более 20 см в ширину, 20 см в длину и 20 см в высоту.
Если робот не подходит по габаритам, то его не допускают к соревнованиям. Диаметр колеса 0,56 см – это стандартный размер колеса из базового набора Lego EV3. Левый большой мотор подключен к порту В, правый к порту С. Теперь вычислим количество оборотов колеса для каждого случая и для разворота робота Lego EV3 на определенный угол.
Расчеты применимы для роботов, собранных на базе любых конструкторов. Разница будет заключаться только в среде программирования, т.к. у разных робототехнических наборов разные программные обеспечения. Но принцип расчета везде одинаковый.
Как будут развиваться роботы
Сложно представить, что только не будут уметь роботы в ближайшие десятилетия. Уже созданы роботизированные мышцы, которые в 1000 раз сильнее человеческих и способны поднимать грузы в 50 раз больше собственного веса. Дальнейшее развитие роботов будет связано с открытием новых материалов и свойств, а также достижений компьютерной техники.
Программное обеспечение манипуляторов со временем увеличит возможности техники и сенсоров. Например, робот-манипулятор, захватывающая груз, сможет сообщить оператору точный вес или размер, а новые компьютерные технологии смогут обеспечить более сложные траектории.
Классификации роботов
В зависимости от общей прикладной области роботов можно разделить на промышленных и сервисных. На сегодняшний день в мире больше промышленных роботов, но ниша сервисных растет с огромной скоростью.
Классы роботов.edit
Важнейшие классы роботов широкого назначения — манипуляционные и мобильные роботы.

Рука робота
Манипуляционный робот — автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления, которая служит для выполнения в производственном процессе двигательных и управляющих функций.
Мобильный робот — автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми приводами. Такие роботы могут быть колёсными, шагающими и гусеничными(существуют также ползающие, плавающие и летающие мобильные робототехнические системы, см. ниже).
Компоненты роботов.edit

Нога робота, работающая навоздушных мышцах.
- Приводы: это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах являются электрические, но применяются и другие, использующие химические вещества или сжатый воздух.
- Двигатели постоянного тока: В настоящий момент большинство роботов используют электродвигатели, которые могут быть нескольких видов.
- Шаговые электродвигатели: Как можно предположить из названия, шаговые электродвигатели не вращаются свободно, подобно двигателям постоянного тока. Они поворачиваются пошагово на определённый угол под управлением контроллера. Это позволяет обойтись без датчика положения, так как угол, на который был сделан поворот, заведомо известен контроллеру; поэтому такие двигатели часто используются в приводах многих роботов и станках с ЧПУ.
- Пьезодвигатели: Современной альтернативой двигателям постоянного тока являются пьезодвигатели, также известные как ультразвуковые двигатели. Принцип их работы весьма оригинален: крошечные пьезоэлектрические ножки, вибрирующие с частотой более 1000 раз в секунду, заставляют мотор двигаться по окружности или прямой. Преимуществами подобных двигателей являются высокое нанометрическое разрешение, скорость и мощность, несоизмеримая с их размерами. Пьезодвигатели уже доступны на коммерческой основе и также применяются на некоторых роботах.
- Воздушные мышцы: Воздушные мышцы — простое, но мощное устройство для обеспечения силы тяги. При накачивании сжатым воздухом мышцы способны сокращаться до 40 % от своей длины. Причиной такого поведения является плетение, видимое с внешней стороны, которое заставляет мышцы быть или длинными и тонкими, или короткими и толстыми. Так как способ их работы схож с биологическими мышцами, их можно использовать для производства роботов с мышцами и скелетом, аналогичными мышцам и скелету животных.
- Электроактивные полимеры: Электроактивные полимеры — это вид пластмасс, который изменяет форму в ответ на электрическую стимуляцию. Они могут быть сконструированы таким образом, что могут гнуться, растягиваться или сокращаться. Впрочем, в настоящее время нет ЭАП, пригодных для производства коммерческих роботов, так как все ныне существующие их образцы неэффективны или непрочны.
- Эластичные нанотрубки: Это — многообещающая экспериментальная технология, находящаяся на ранней стадии разработки. Отсутствие дефектов в нанотрубках позволяет волокну эластично деформироваться на несколько процентов. Человеческий бицепс может быть заменён проводом из такого материала диаметром 8 мм. Подобные компактные «мышцы» могут помочь роботам в будущем обгонять и перепрыгивать человека.
Краткая история роботизации
За последние 100 лет роботы не просто эволюционировали, они стали частью нашей повседневной жизни. Слово «робот» вошло в обиход после того, как в 1920 году свет увидела пьеса Карла Чапека об искусственных людях. И это очень символично, так как «ревущие» двадцатые — период экономического подъема и новых открытий в науке и технике.
В течение последующих десятилетий произошли выдающиеся открытия в самых различных дисциплинах — кибернетика, мехатроника, информатика, электроника, механика, а именно на них и опирается робототехника. Примерно к 30-м годам XX века появились первые андроиды, которые могли двигаться и произносить простейшие фразы.
Первые программируемые механизмы с манипуляторами были сконструированы в 1930-х годах в США. Толчком послужили работы Генри Форда по созданию автоматизированной производственной линии. На рубеже 1930-40-х годов в СССР появились автоматические линии для обработки деталей подшипников, а в конце 1940-х годов было впервые в мире создано комплексное производство поршней для тракторных двигателей с автоматизацией всех процессов — от загрузки сырья до упаковки готовой продукции.
В 1950 году Тьюринг в работе «Computing Machinery and Intelligence» описал способ, позволяющий определить, является ли машина мыслящей (тест Тьюринга). В 1950-х годах появились первые механические манипуляторы, которые копировали движения рук оператора и могли работать с радиоактивными материалами.
В 1956 году американские инженеры Джозеф Девол и Джозеф Энгельберг организовали первую в мире компанию «Юнимейшн» (англ. Unimation, сокращенный термин от Universal Automation, универсальная автоматика), и в начале 1960-х первый в мире промышленный робот начал работать на производственной линии завода General Motors.
Робот Unimate, которого отправили на фабрику General Motors
Области применения промышленных роботов
Промышленные роботы дают возможность автоматизировать все виды операций. Сфера применения довольно широка: заготовительное производство, механообработка, сварочное производство, сборочное производство, термообработка, гальванические и лакокрасочные покрытия, транспортно-накопительные системы.
Промышленные роботы Kuka
Поворот вокруг одного колеса
В этом случае у нас радиус поворота будет 20 см, а диаметр описываемой окружности 40 см. Поэтому длина описываемой окружности будет в два раза больше и как для полной окружности, так и для ее части нужно просто предыдущие вычисления умножить на два.
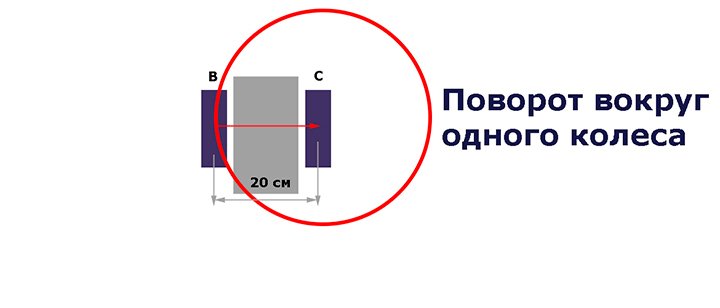 Для того чтобы сделать поворот вокруг одного колеса на 360 градусов нам понадобится в предыдущей формуле d умножить на 2, а значит и количество оборотов колеса увеличится вдвое.
Для того чтобы сделать поворот вокруг одного колеса на 360 градусов нам понадобится в предыдущей формуле d умножить на 2, а значит и количество оборотов колеса увеличится вдвое.
L = π * 2 * d = 3.14 *2 * 0,2 м = 1,256 метра
Для робота собранного на базе набора Lego EV3 целесообразно применить программирование с помощью блока «Независимое управление моторами». Где одному мотору задать нулевое значение оборотов, а другому вычисленное. При повороте на 360 градусов это будет 7,136 оборота.
Разворот на месте
- Разворот робота на 360 градусов
В этом случае нужно чтобы у робота колеса вращались в разных направлениях с одинаковой скоростью. Для того чтобы робот совершил полный разворот вычислим необходимую длину окружности. Разворот будет на месте, поэтому диаметр между осями будет равен 20 см =>
Длина описываемой окружности будет равнаL = π * d = 3.14 * 0,2 м = 0,628 метра
Количество оборотов будет равно пройденному расстоянию L деленному на длину окружности колеса n = Lокр / L колеса, где длина окружности колеса равна L = π * d = 3.14 * 56 = 175,84 мм = 0,176 м.
А значит количество оборотов для разворота на 360° будет равно
n = L окр / L колеса = 0,628 / 0,176 = 3,568 оборота.
Для блока программирования «Рулевое управление» можно задать разворот на 100 условных единиц (или – 100), что означает разворот на месте. Скорость 50 у.е. и 3,568 оборота.
Для блока программирования «Независимое управление моторами» просто скорость одного мотора ставим 50 у.е., а другого – 50 у.е. При этом количество оборотов колес остается 3,568.
- Для того, чтобы повернуть робота тележку Lego EV3 на произвольное количество градусов нужно составить пропорцию, где нужное количество градусов нужно разделить на 360 градусов и учесть эту пропорцию в расчете.
Например, для разворота на 180 градусов. Обозначим нужную длину части окружности L1 =>
L1 = L * (нужное к-во градусов / 360 градусов) = L * (180 / 360) = L / 2 = 0,628 / 2 = 0,314, а значит к-во оборотов
n = L1 / L колеса = 0,314 / 0,176 = 1,784 оборота.
Расчет числа оборотов
Для того, чтобы рассчитать количество оборотов колеса для движения на заданное расстояние по прямой нужно использовать длину окружности колеса. Она вычисляется по формуле L = π * d. Где π – число Пи, равное 3,14, а d –диаметр колеса. Для базового набора Lego EV3 диаметр колеса составляет 56 мм.
Пусть робот EV3 оснащен двумя передними колесами и шаровой опорой сзади и должен проехать 1 метр. За один оборот колеса робот преодолевает расстояние L = π * d = 3.14 * 56 = 175,84 мм.
n = 1000 мм / 175,84 мм = 5,69 оборотов.
Программа для Lego EV3 для движения робота на заданное количество оборотов.
- Во вкладке «Движение» выбираю блок «Рулевое управление».
Устанавливаю режим «Включить на количество оборотов», «Рулевое управление» установлено в 0 – это означает движение по прямой линии. Большие моторы установлены в порты B и C.
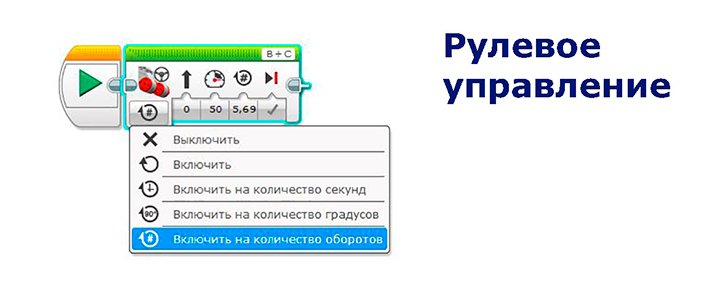 Скорость движения моторов – 50 условных единиц. Значение оборотов ставлю вычисленное выше. Тормозить в конце – значение «Истина». При нажатии на блок «Начало» робот Lego EV3 проедет по прямой 1 метр со скоростью 50 у.е. и остановиться.
Скорость движения моторов – 50 условных единиц. Значение оборотов ставлю вычисленное выше. Тормозить в конце – значение «Истина». При нажатии на блок «Начало» робот Lego EV3 проедет по прямой 1 метр со скоростью 50 у.е. и остановиться.
- При втором способе используется блок «Независимое управление моторами».
Все настройки блока такие же, как и настройки у блока «Рулевое управление». Для того чтобы робот ехал по прямой необходимо скорость моторов установить одинаковой.
Робот за 3 минуты
Зная количество оборотов мотора робота в минуту можно вычислить время, за которое робот преодолеет нужное расстояние.
Для робота Lego EV3 количество оборотов большого мотора составляет 160 – 170 оборотов в минуту.
Поэтому вычисление времени будет приблизительным т.к. у каждого мотора количество оборотов в минуту может быть разным.
Ломанная траектория представляет из себя комбинацию из прямолинейных и криволинейных участков. Криволинейные участки можно вычислять, используя формулу вычисления длины окружности.
Системы управления.edit
Под управлением роботом понимается решение комплекса задач, связанных с адаптацией робота к кругу решаемых им задач, программированием движений, синтезом системы управления и её программного обеспечения.
По типу управления робототехнические системы подразделяются на:
- Биотехнические:
- командные (кнопочное и рычажное управление отдельными звеньями робота);
- копирующие (повтор движения человека, возможна реализация обратной связи, передающей прилагаемое усилие, экзоскелеты);
- полуавтоматические (управление одним командным органом, например, рукояткой всей кинематической схемой робота);
- Автоматические:
- программные (функционируют по заранее заданной программе, в основном предназначены для решения однообразных задач в неизменных условиях окружения);
- адаптивные (решают типовые задачи, но адаптируются под условия функционирования);
- интеллектуальные (наиболее развитые автоматические системы);
- Интерактивные:
- автоматизированные (возможно чередование автоматических и биотехнических режимов);
- супервизорные (автоматические системы, в которых человек выполняет только целеуказательные функции);
- диалоговые (робот участвует в диалоге с человеком по выбору стратегии поведения, при этом как правило робот оснащается экспертной системой, способной прогнозировать результаты манипуляций и дающей советы по выбору цели).
Среди основных задач управления роботами выделяют такие:
- планирование положений;
- планирование движений;
- планирование сил и моментов;
- анализ динамической точности;
- идентификация кинематических и динамических характеристик робота.
В развитии методов управления роботами огромное значение имеют достижения технической кибернетики и теории автоматического управления.
Способы перемещения.edit
Колёсные и гусеничные роботы
Наиболее распространёнными роботами данного класса являются четырёхколёсные и гусеничные роботы. Создаются также роботы, имеющие другое число колёс — два или одно. Такого рода решения позволяют упростить конструкцию робота, а также придать роботу возможность работать в пространствах, где четырёхколёсная конструкция оказывается неработоспособна.

Сегвей в Музее роботов в Нагоя.
Двухколёсные роботы, как правило, для определения угла наклона корпуса робота и выработки подаваемого на приводы роботов соответствующего управляющего напряжения (с целью обеспечить удержание равновесия и выполнение необходимых перемещений) используют те или иные гироскопические устройства.
Задача удержания равновесия двухколёсного робота связана с динамикой обратного маятника. На данный момент, разработано множество подобных «балансирующих» устройств. К таким устройствам можно отнести Сегвей, который может быть использован, как компонент робота; так например сегвейиспользован как транспортная платформа в разработанном НАСА роботе Робонавт.
Одноколёсные роботы во многом представляют собой развитие идей, связанных с двухколёсными роботами. Для перемещения в 2D пространстве в качестве единственного колеса может использоваться шар, приводимый во вращение несколькими приводами. Несколько разработок подобных роботов уже существуют.
Примерами могут служить шаробот разработанный в университете Карнеги — Меллона, шаробот«BallIP», разработанный в университете Тохоку Гакуин (англ. Tohoku Gakuin University), или шаробот Rezero, разработанный в Швейцарской высшей технической школе.
Три поколения роботов
- Роботы первого поколения, освоенные промышленностью в 1960-х годах, работали по жесткой программе, не могли адаптироваться к изменяющимся условиям производства и внешней среды, а на входе требовали упорядоченного размещения ориентированных деталей в накопителе. Некоторые из первых промышленных роботов «Версатран» и «Юнимейт» функционируют до сих пор, преодолев порог в 100 тысяч часов рабочего времени.
- Роботы второго поколения работают по гибкой программе и используются для выполнения сложных производственных задач, например, для сборки прецизионных изделий. Прецизионный — обладающий высокой точностью или созданный с соблюдением высокой точности параметров. У таких роботов более развитый сенсорный аппарат, который обеспечивает работу по принципу «ситуация — действие» и способен выбрать оптимальный алгоритм функционирования в зависимости от хода производственного процесса.
- Роботы третьего поколения — это уже интегральные или интеллектуальные системы, оснащенные новейшими средствами адаптации. Они имеют способность к самообучению и распознаванию образов, которая является важным элементом искусственного интеллекта. С развитием ИИ роботы получают возможность моделировать внешнюю среду, анализировать производственную обстановку, принимать решения и планировать собственные действия.
Яркие исторические робоперсонажи
В 1927 году, спустя семь лет после написания
R.U.R., американская Westinghouse Electric Company представила Мистера Герберта Телевокса — робота, принимавшего через телефон сигналы, которые активировали заложенную в нём программу. По утверждению создателя, Телевокс мог включить плиту или проверить, работает ли свет в доме.


