

- Демонтажный робот: купить демонтажного робота, цены демонтажных роботов разрушителей, демонтажные роботы . что такое робот разрушитель? демонтажные роботы
- Демонтажный робот
- Демонтажные роботы
- Где применяется демонтажный робот разрушитель?
- Конструктивный состав демонтажного робота
- Чем новые модели демонтажных роботов отличаются от предыдущих?
- Как управлять роботом разрушителем?
- Почему демонтажный робот разрушитель эффективно заменяет тяжелую спецтехнику?
- Как демонтажный робот разрушитель может заменить человеческий труд?
- Какие работы можно провести с помощь демонтажем робота, кроме разршения?
- : мастер-класс «поделка из бумаги «шагающий робот»
- Карта уборки робота-пылесоса xiaomi
- Автоматический способ построения карты
- Добавление робота-пылесоса xiaomi в homey
- Определение координат
- Обозначение границ зон
- Добавление комнат
- Как сбросить карту. как создать несколько карт
- Обзор робота
- Осмотр управляющих модулей
- Сборка
- Создание роботов из бумаги
Демонтажный робот: купить демонтажного робота, цены демонтажных роботов разрушителей, демонтажные роботы . что такое робот разрушитель? демонтажные роботы
Демонтажный робот
Сегодня появляется много новой спецтехники, в том числе, можно найти предложения от профессиональных поставщиков спецтехники –
робота разрушителя для проведения демонтажных
работ, поэтому закономерно возникает вопрос:
что такое робот разрушитель
?
Демонтажный робот
разрушитель – это мобильный многофункциональный робототехнический машинный комплекс дистанционного управления, который, в зависимости от типа навесного инженерного оборудования и агрегатов, применяется для проведения безопасных демонтажных, строительных, очистительных и других видов работ.
Современные
роботы для демонтажа
показывают свою высокую эффективность по времени демонтажных работ, по производительности, по экономической эффективности и по беспрецедентной безопасности для задействованого персонала, в сравнении с существующими сегодня методами демонтажа.
Скорость смены навесного оборудования и
переориентация демонтажного робота
на другие виды работ, благодаря инновационным конструкторским решениям, занимает не более 5 минут.
Демонтажные роботы
Получив широкое распространение во многих сферах,
демонтажные роботы
стали производится в различных модификациях, наилучшим образом соответствуя конкретным условиям и поставленным задачам.
Роботы для демонтажа классифицируются
по следующим признакам:
–
по назначению демонтажные роботы
разрабатывают для строительства (наземного, подземного), демонтажа на атомных объектов, для работы с футеровкой на металлургических производствах, для работы на производстве цемента, для кирпичных заводов,
–
по мощности модели демонтажных роботов
бывают: лёгкими, средними, тяжёлыми, сверхтяжелыми,
– по исходному навесному оборудованию,
– по габаритным размерам,
– по транспортной базе демонтажные роботы бывают гусеничные, на лапах, колесные,
– по брендам, производителям, маркам, странам, заводам.
Где применяется демонтажный робот разрушитель?
Демонтажные роботы разрушители зданий и сооружений
во всем мире нашли очень широкое применение как в сферах демонтажа, так и других сферах. Конкретная сфера применения демонтажем робота зависит от наличия того или иного состава навесного гидравлического, механического, технологического оборудования, например:
– при использовании гидравлического молота у демонтажного робота он может разрушать бетонные, железобетонные, асфальтовые покрытя
– если на робот разрушитель навесить бетонолом, то с его помощью можно разрушать особопрочные бетонные конструкции,
– при применении гидравлических ножниц робот разрушитель сможет разрушать арматуру
– благодаря грейферам демонтажный робот справится с разгребанием разных завалов,
– с помощью ковша робот разрушитель справится с вычерпыванием сыпучих и жидких фракций.
–
робот-разрушитель
можно применить даже в качестве оружия, если это кому-то когда-то понадобится.
Конструктивный состав демонтажного робота
Конструктивный состав робота для демонтажа
включает в себя следующие основные узлы, конструкции, агрегаты и элементы:
–
демонтажный робот разрушитель
работает от электродвигателя большой мощности, также он имеет очень емкую батарею, благодаря чему обеспечивается высокая сила удара у рабочего механизма.
– рабочие инструменты для разрушения и для проведения других работ, крепятся на
манипулятор демонтажного робота
,
– удемонтажного робота есть гусеницы, которые можно менять, и четыре опоры, которые называют ногами,
– на гусеницах демонтажный робот передвигается практически по любым неровным поверхностям, в том числе, разрушенным, при этом, он может разогнаться до 2,5 км/час,
– ноги (опоры) демонтажные робота используются для придания ему устойчивого положения на любой поверхности, включая, обломки разрушенного объекта.
– центр тяжести демонтажного робота располагается сравнительно низко, поэтому он достаточно устойчив.
– вес демонтажные робота составляет около 1 тонны, при этом, его рабочая высота достигает до 3 метров, благодаря чему
роботы для демонтажных работ
могут работать в весьма ограниченных пространствах,
– по своим
размерам демонтажные работы
очень компактны, причем настолько, что их можно поднимать на грузовых лифтах,
– поворотная башня манипулятора может разворачиваться вокруг своей оси со скоростью 10с., а максимальный угол наклона составляет до 30гр.,
– рабочие элементы демонтажных роботов, в том числе, различные узлы, механизмы, фары, очень хорошо защищены от всевозможных случайных ударов о любые предметы, осколки, обломки.
– управление демонтажным роботом осуществляется дистанционно с использованием пульта, напоминающего игровой джойстик.
– на робот разрушитель можно навешивать огромное количество невестого оборудования, однако, его разработчики не рекомендуют, чтобы масса дополнительного оборудования была больше 160 кг.,
– кроме навесного оборудования робот разрушитель можно дополнять по мощности, например, оснащать противовесом,
– для увеличения срока службы робота разрушителя, его оснащают различными защитными приспособлениями, например: фильтрами, чехлом.
Чем новые модели демонтажных роботов отличаются от предыдущих?
Разработчики
демонтажных роботов
усиленно работают над увеличением мощности разрушительного удара, не увеличивая, при этом, его основные габариты (массу, размеры).
Также большое внимание разработчики уделяют интеллектуальным функциям демонтажных роботов, стремясь максимально облегчить и повысить качество его работы.
Очень важной составляющей для всех демонтажных роботов является его мобильность, универсальность, благодаря чему у него появляется огромное разнообразие работ, которые он может очень точно и качественно выполнять, не смотря ни на какие внешние препятствия.
Как управлять роботом разрушителем?
Управление демонтажным роботом разрушителем
происходит посредством специального пульта, с которого роботу передается сигнал через поводной канал, либо через цифровое радио.
Дистанционное управление роботом для демонтажа позволяет не только сократить его размеры и массу, но, самое главное, делает всё разрушающие и другие опасные демонтажные работы совершенно безопасными для оператора, так как он всегда находится на расстоянии, достаточном для обеспечения личной физической безопасности.
Чтобы увеличить расстояние безопасных работ, но, сохранить, при этом, хорошую управляемость, роботы разрушители оснащаются специальным комплексом видеокамер и датчиков, с помощью которых оператор робота спокойно может управлять работой демонтажного робота, опираясь на видеоизображение на мониторе пульта управления и на показания датчиков.
Почему демонтажный робот разрушитель эффективно заменяет тяжелую спецтехнику?
При демонтаже различных объектов иногда просто невозможно использовать крупный и тяжёлый экскаватор или бульдозер, в таких случаях помощь демонтажного робота просто необходима, так как он не такой крупный, как стандартная тяжёлая строительная техника, но, почти такой же мощный. Поэтому робот относительно спокойно может заехать внутрь практически любых объектов, сооружений, зданий, помещений, и, даже, сможет подняться на грузовом лифте.
Как демонтажный робот разрушитель может заменить человеческий труд?
Робот разрушитель для демонтажа с большим успехом заменяет утомительный человеческой труд, с применением тяжёлых строительных инструментов. Он может работать целый день без перерывов и остановок с постоянной высокой скоростью.
Например, если сравнить эффективность работы по снятию бетонной стяжки пола на большой площади с использованием демонтажного робота и ручного труда бригады рабочих, то сразу выявляться ряд преимуществ у демонтажного робота, в частности, следующих:
– у демонтажного робота на эту работу уйдет в несколько раз меньше времени, чем у бригады рабочих,
– робот разрушитель не устает в течение смены и его производительность не падает,
– когда возникает необходимость параллельного сноса перегородок, то демонтажный робот быстро справится с этой задачей, в то время как бригаде нужны дополнительные ресурсы,
– если нужно снести вертикальные объекты, то демонтажный робот делает это с такой же высочайшей точностью и безопасностью как и при работе с горизонтальными объектами, с минимальными рисками непредвиденных обвалов, в отличие от ручного труда, когда людям приходится работать с тяжёлыми разрушающими инструментами (например, с ножницами или с молотом),
Какие работы можно провести с помощь демонтажем робота, кроме разршения?
Робот для демонтажных работ может выполнять не только разрушение объектов, но и многие другие работы с помощью инструментов и оборудования, которое монтируется на манипулятор робота.
Демонтажный робот может заменить целый автопарк специальной техники, так как работы, которые проводятся демонтажным роботом зависят от применяемого навесного оборудования, например, он может перемешать многие предметы, копать ямы и траншеи, применяться как подъемник, как
буровая установка
, как
фронтальный погрузчик
и так далее
.





: мастер-класс «поделка из бумаги «шагающий робот»
Галина Шинаева
Мастер-класс «Поделка из бумаги «Шагающий робот»

Сегодня мы сделаем шагающего робота, без электроники, управляемого с помощью ручек.
Материал.
Лист двусторонней цветной бумаги.
Ножницы
Клей
Скотч.
Две кулинарные шпажки (или 2 прищепки).
Ход работы.
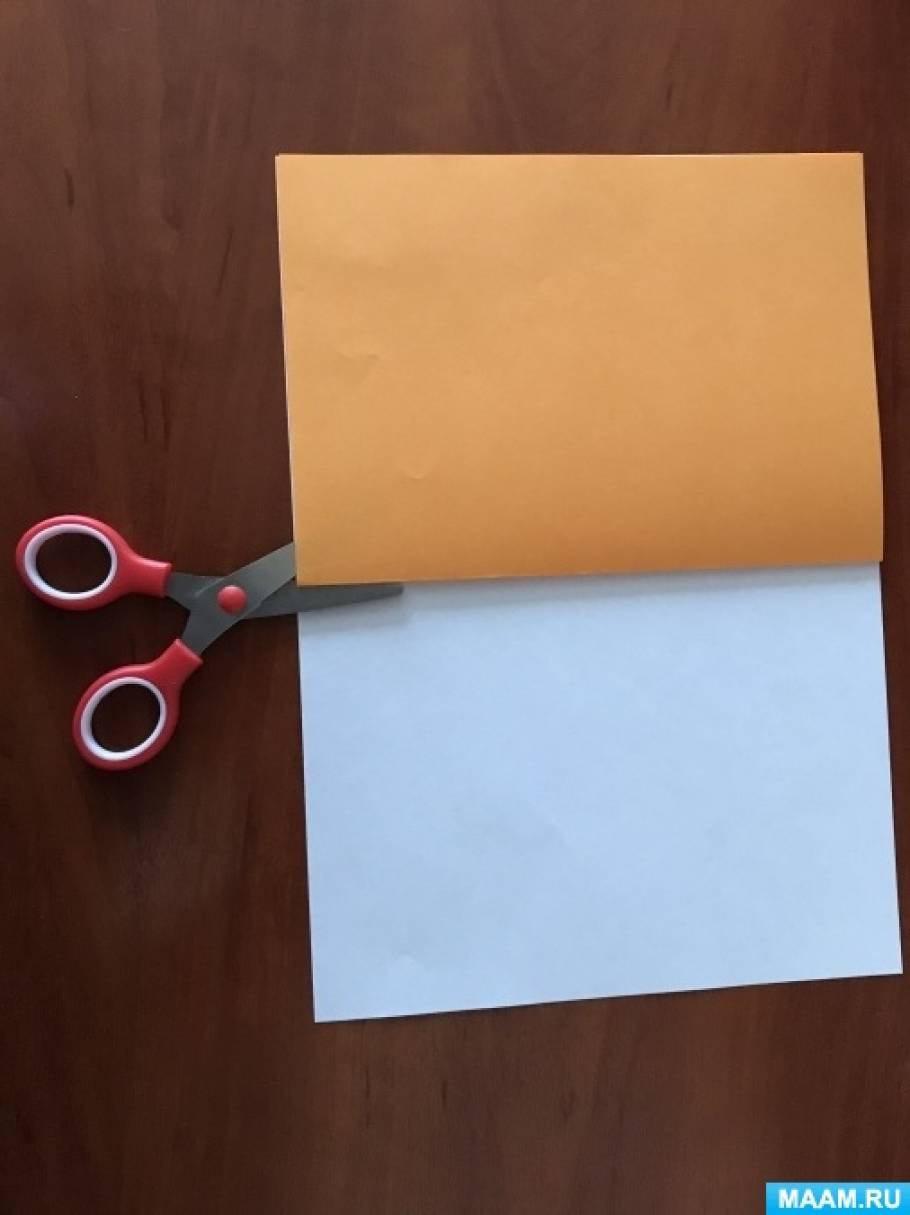
Согнем лист бумаги пополам по длинной стороне. Разрежем.
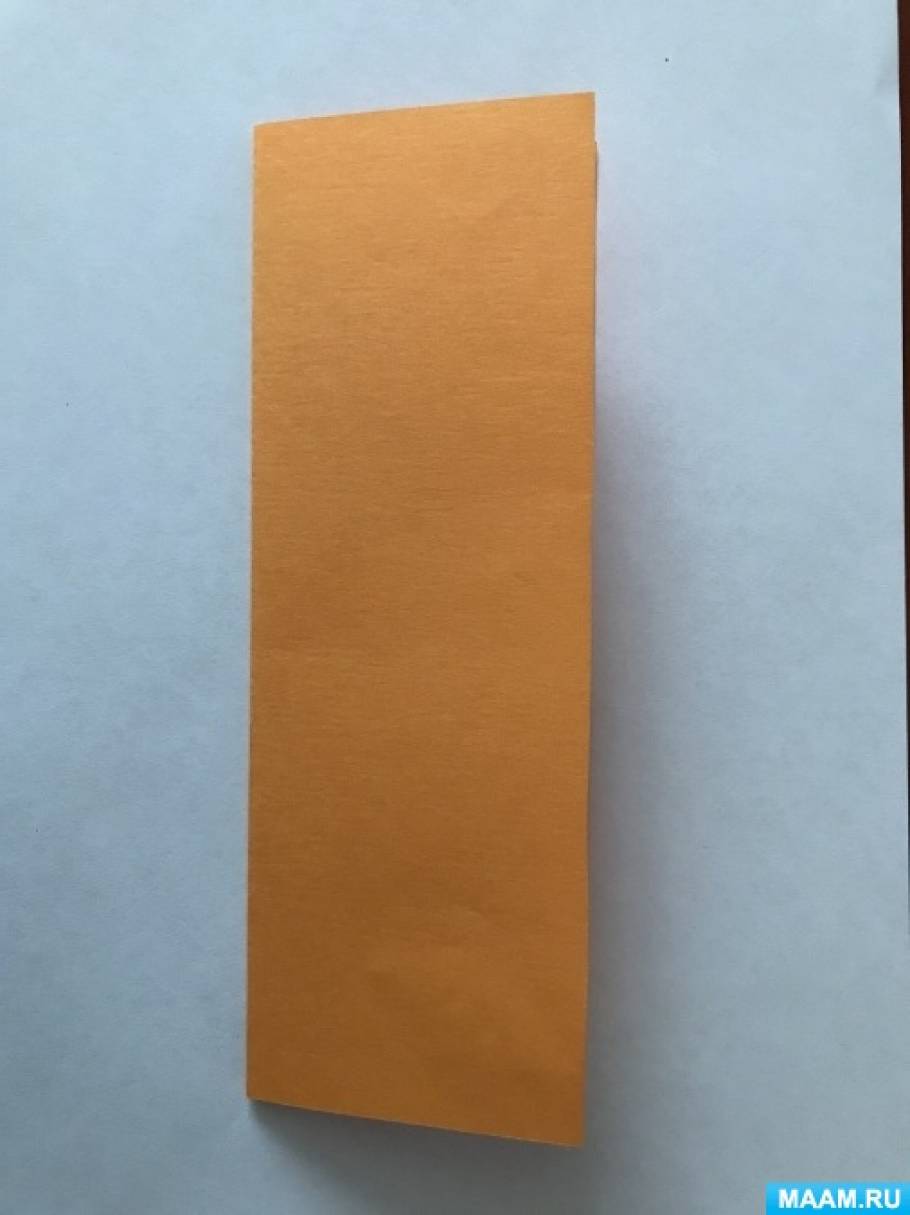
Сложим одну из половинок пополам.
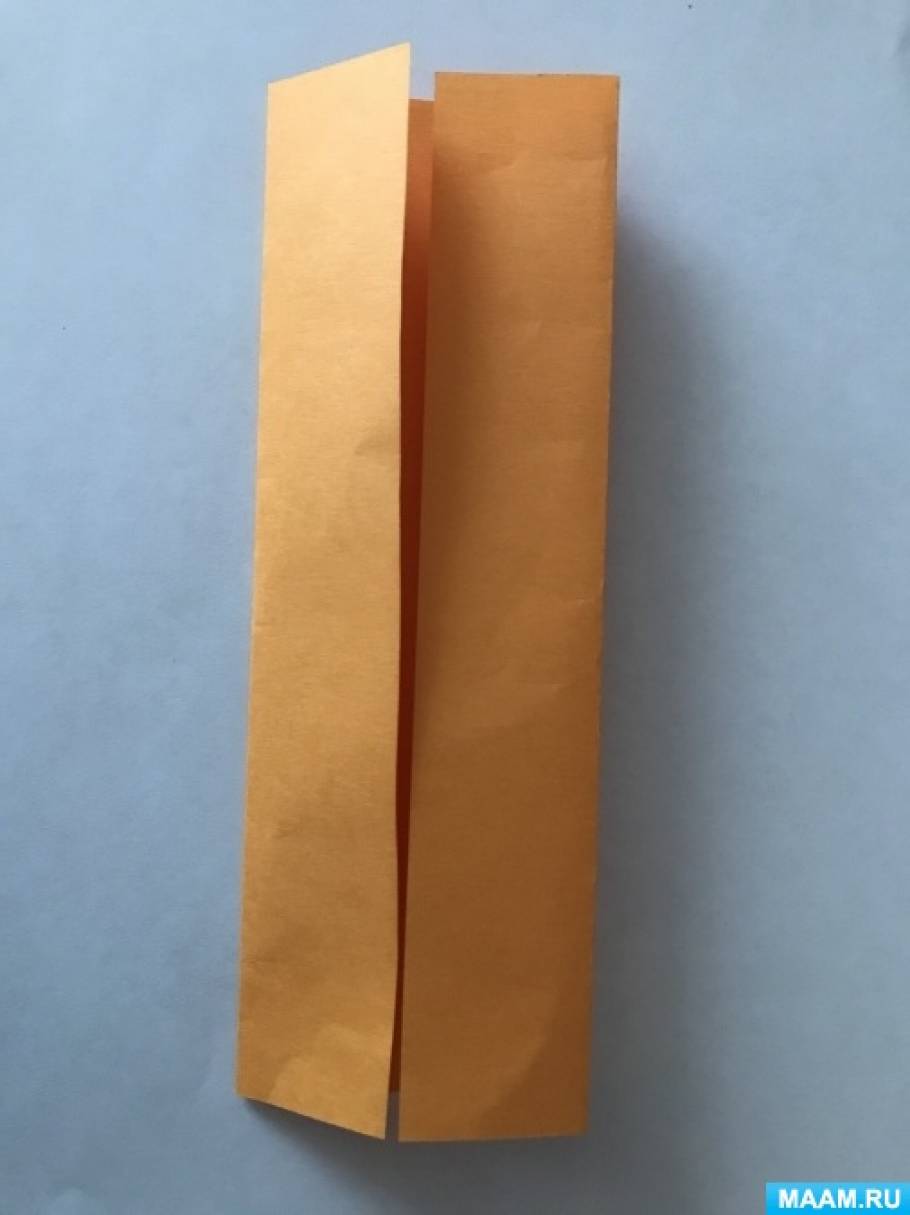
Раскроем. Каждую сторону загнем к линии сгиба.
Раскроем. У нас получился прямоугольник, разделенный линиями на четыре равные части.

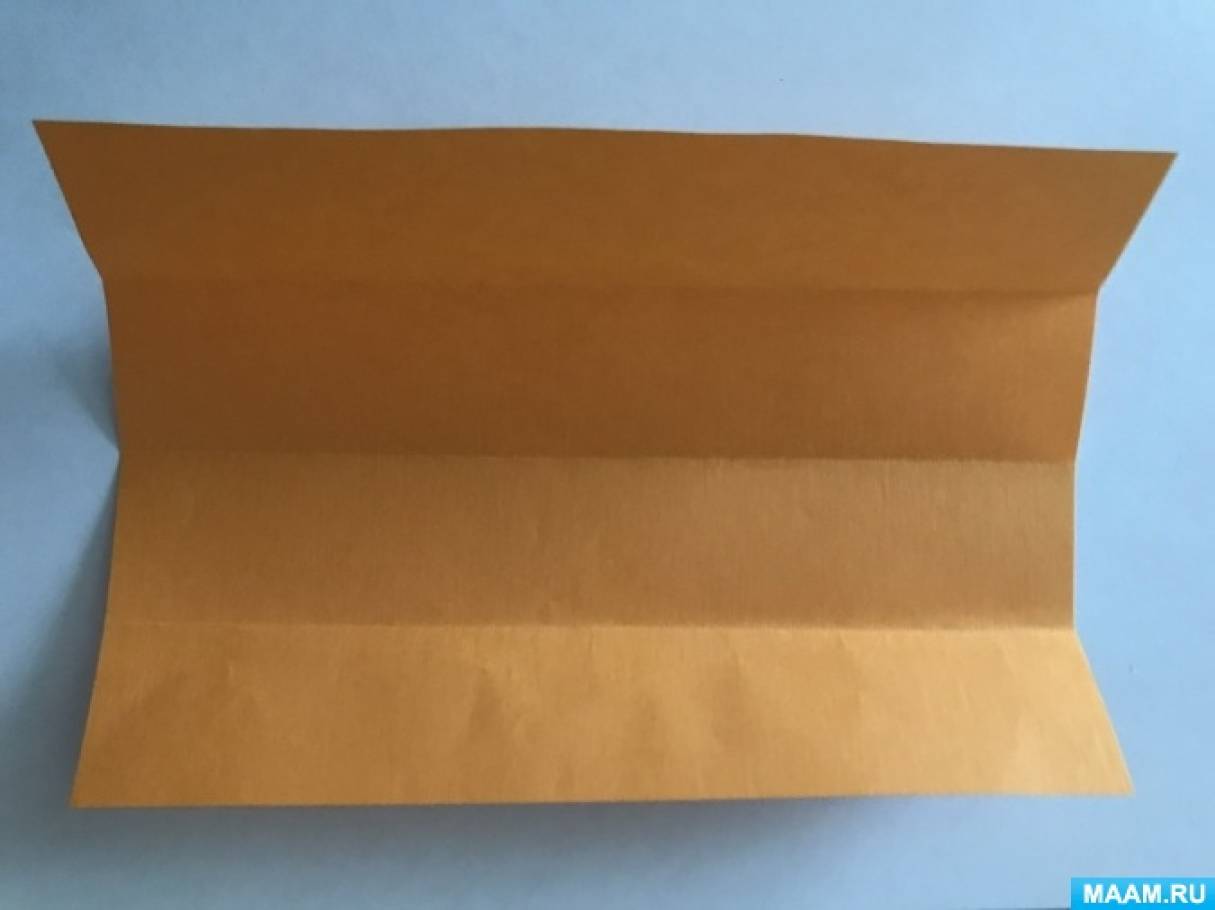
Снова сложим прямоугольник пополам.
Сделаем надрезы по линии сгиба до следующей линии на одинаковом расстоянии друг от друга.
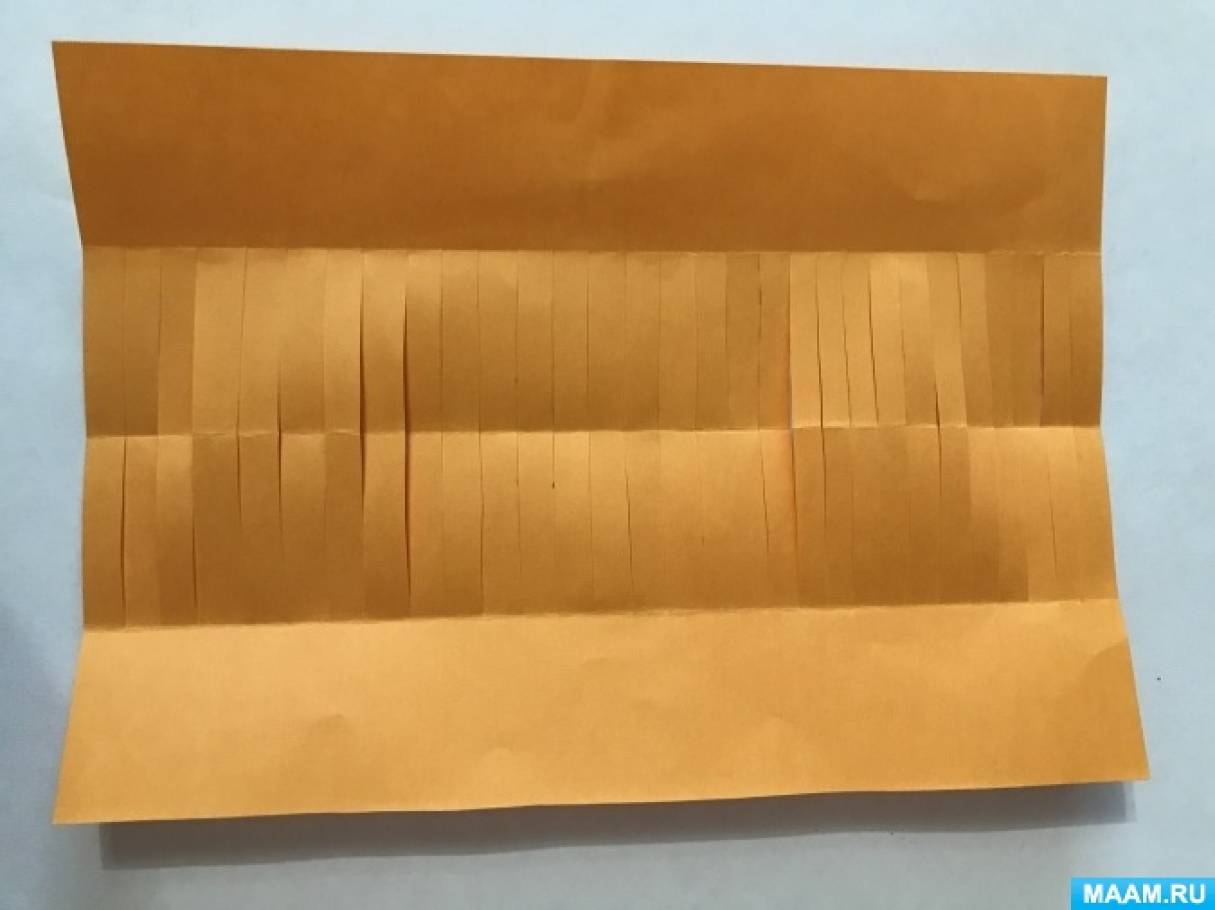
Раскроем.

Склеим неразрезанные стороны.
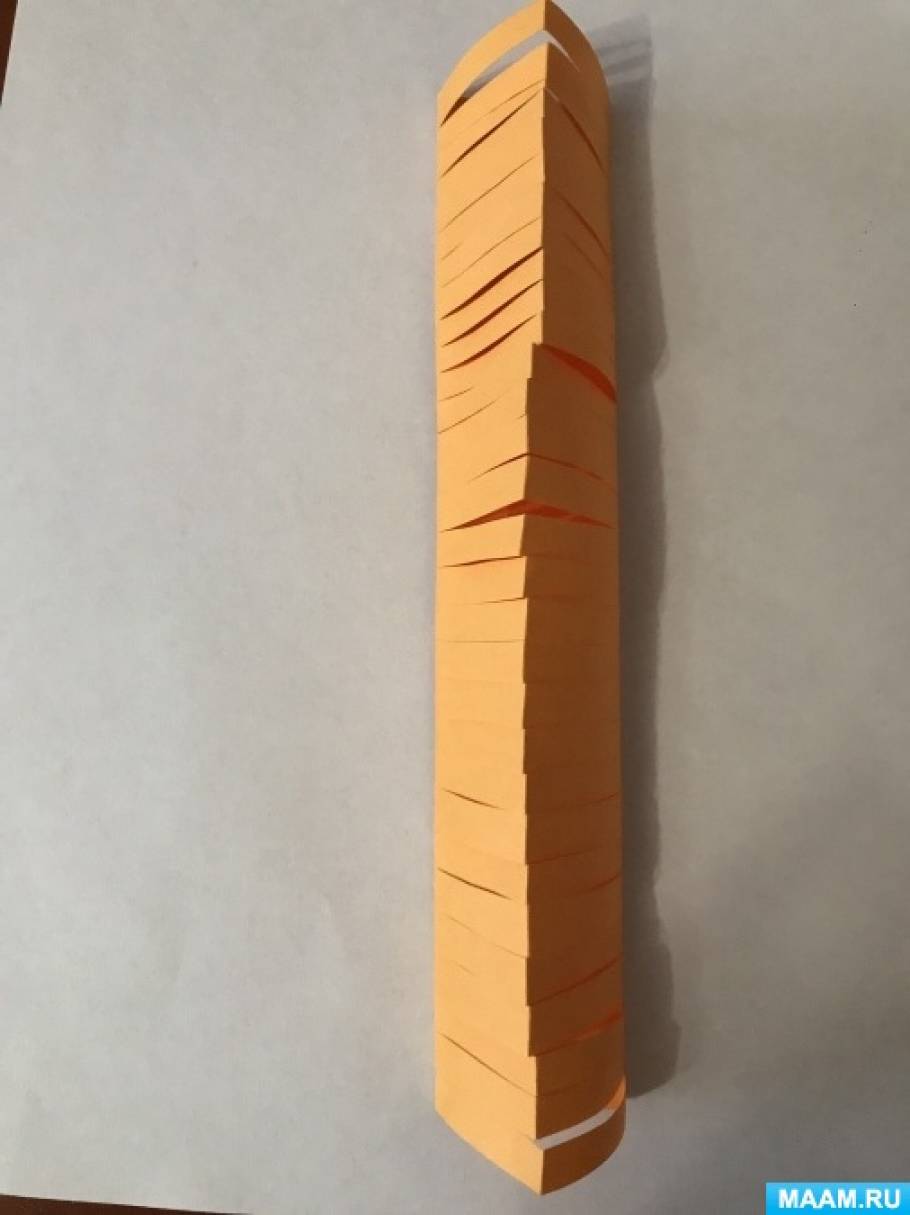
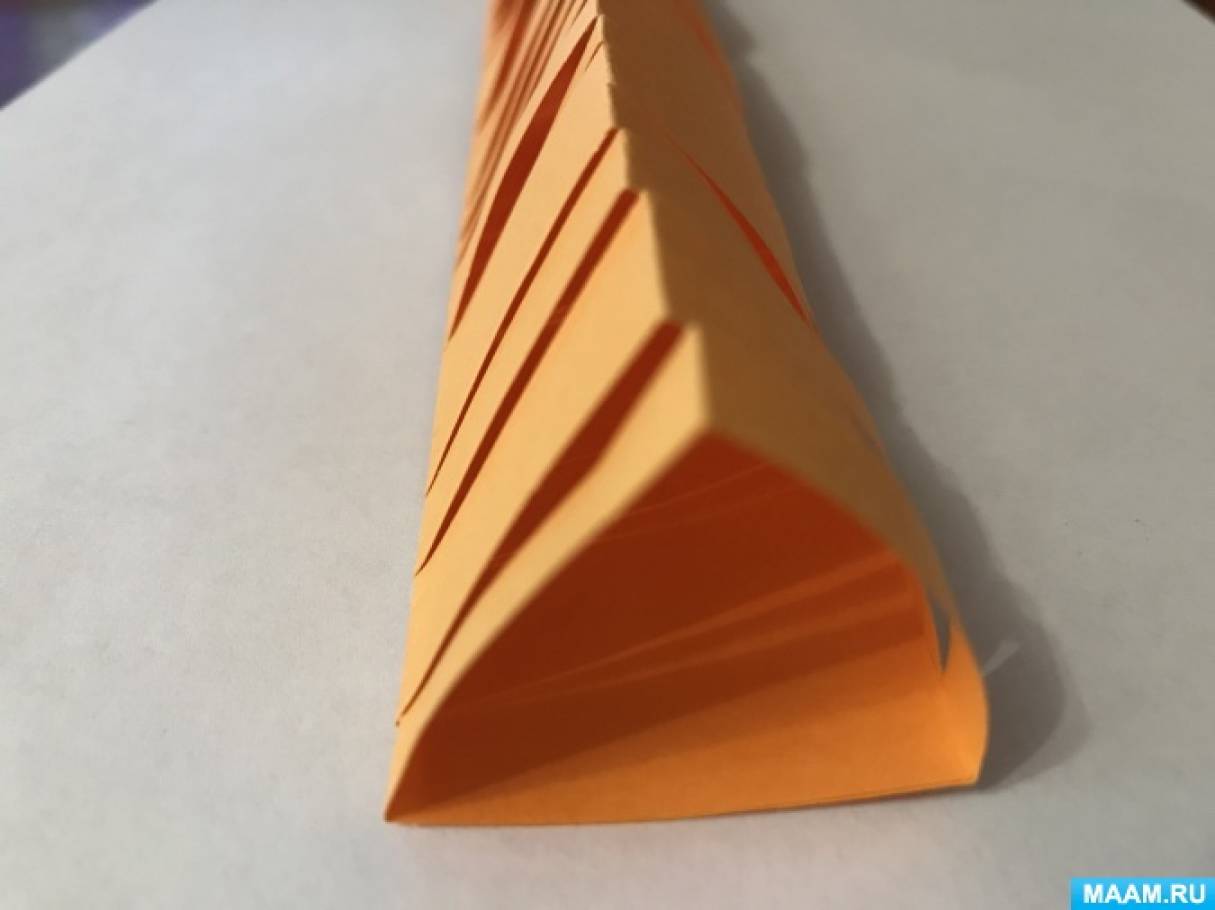
Получилась гибкая деталь — это ноги робота.
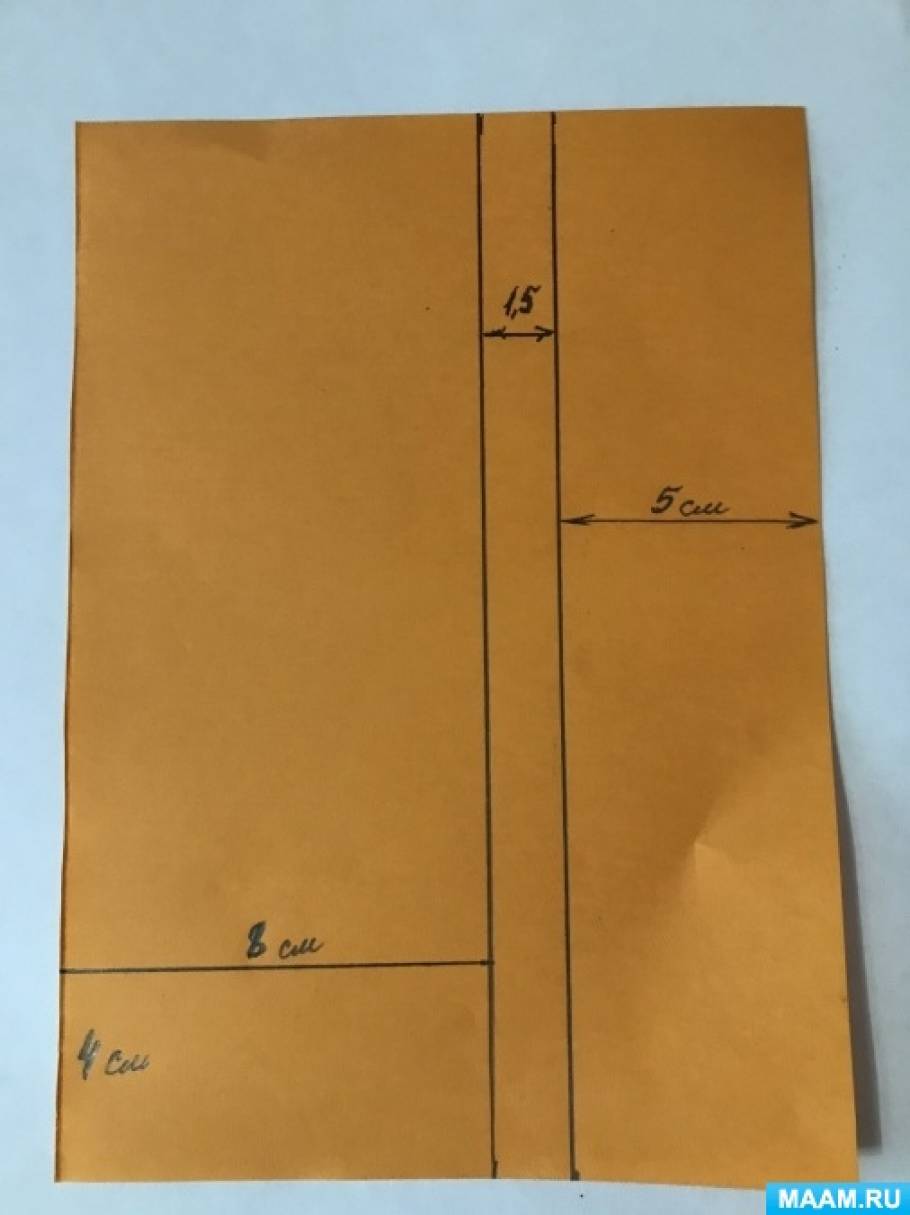
Берем вторую половину листа и отрезаем от нее полоски – 1,5 см х 21 см, 5см х 21см.
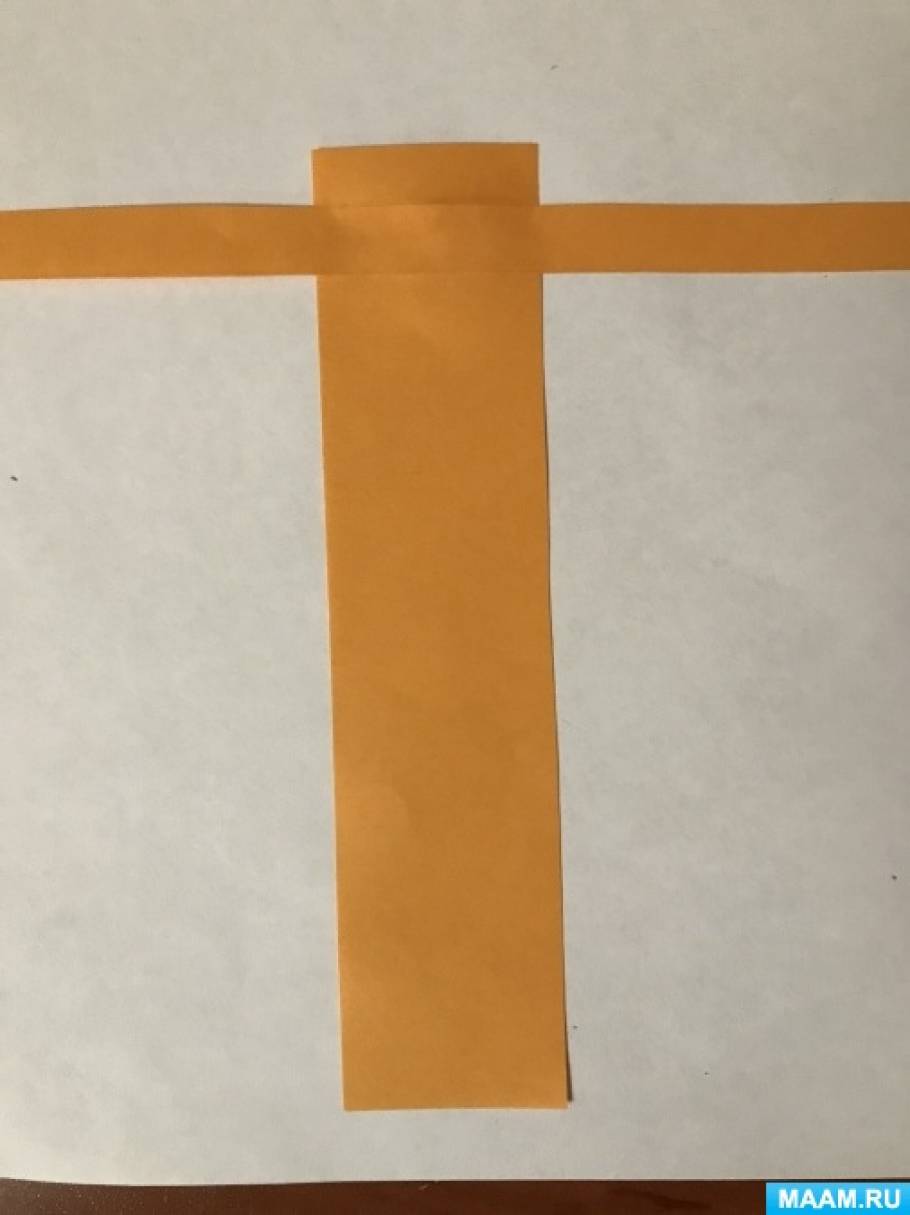
Приклеим узкую полоску к широкой полоске отступив от края короткой стороны 1,5 см.
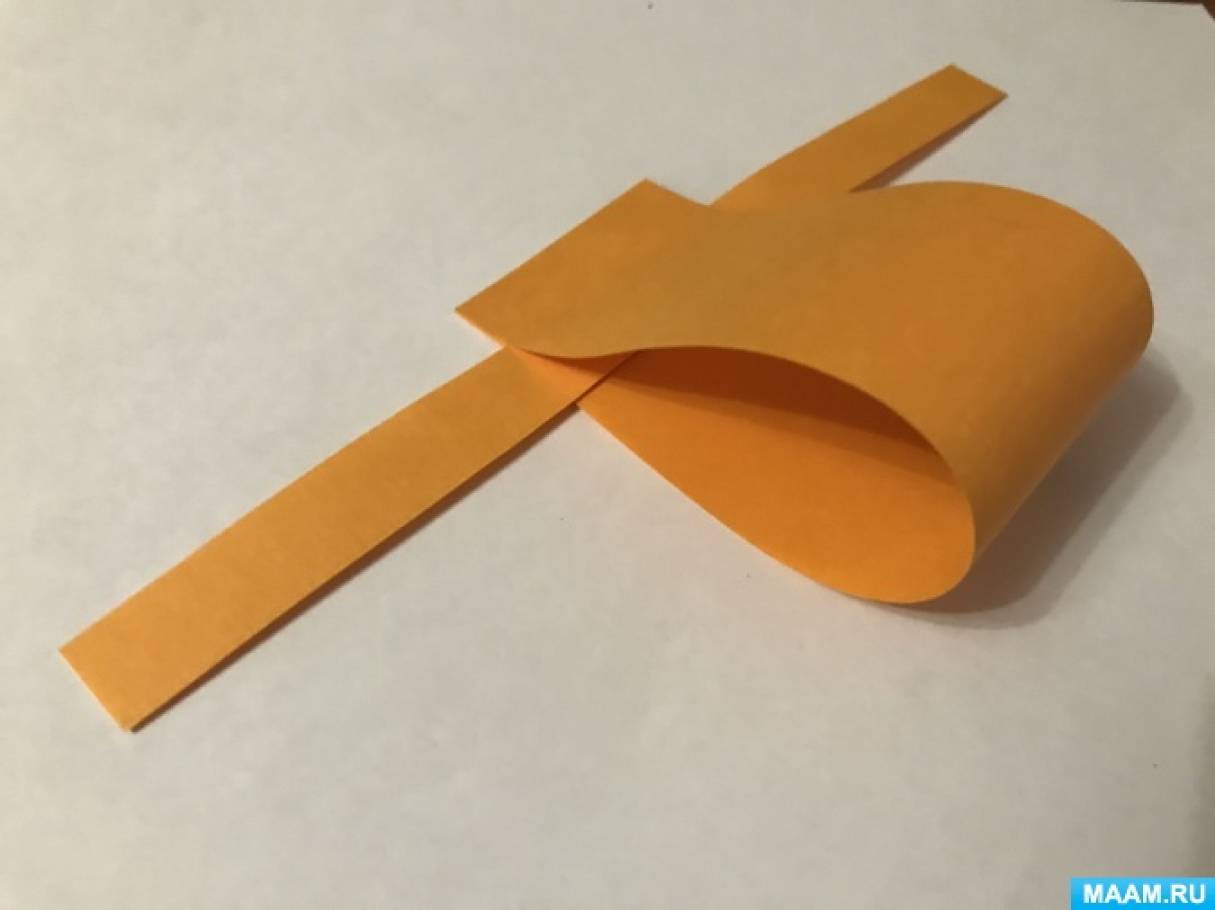
Нижнюю сторону широкой полоски приклеим к верхней.

Выступающие части узкой полоски с обеих сторон сложим гармошкой – это руки.
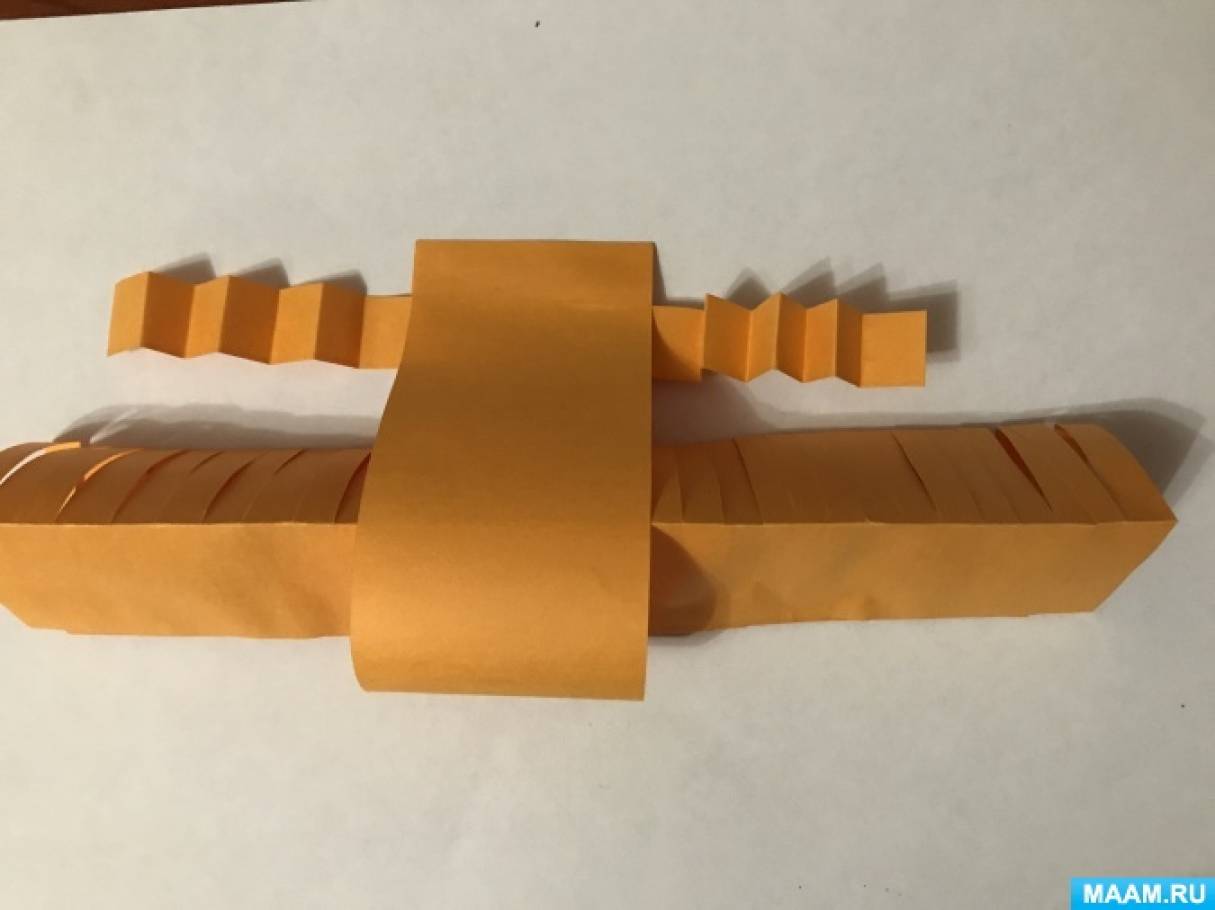
В получившуюся заготовку аккуратно вставим гибкую деталь.
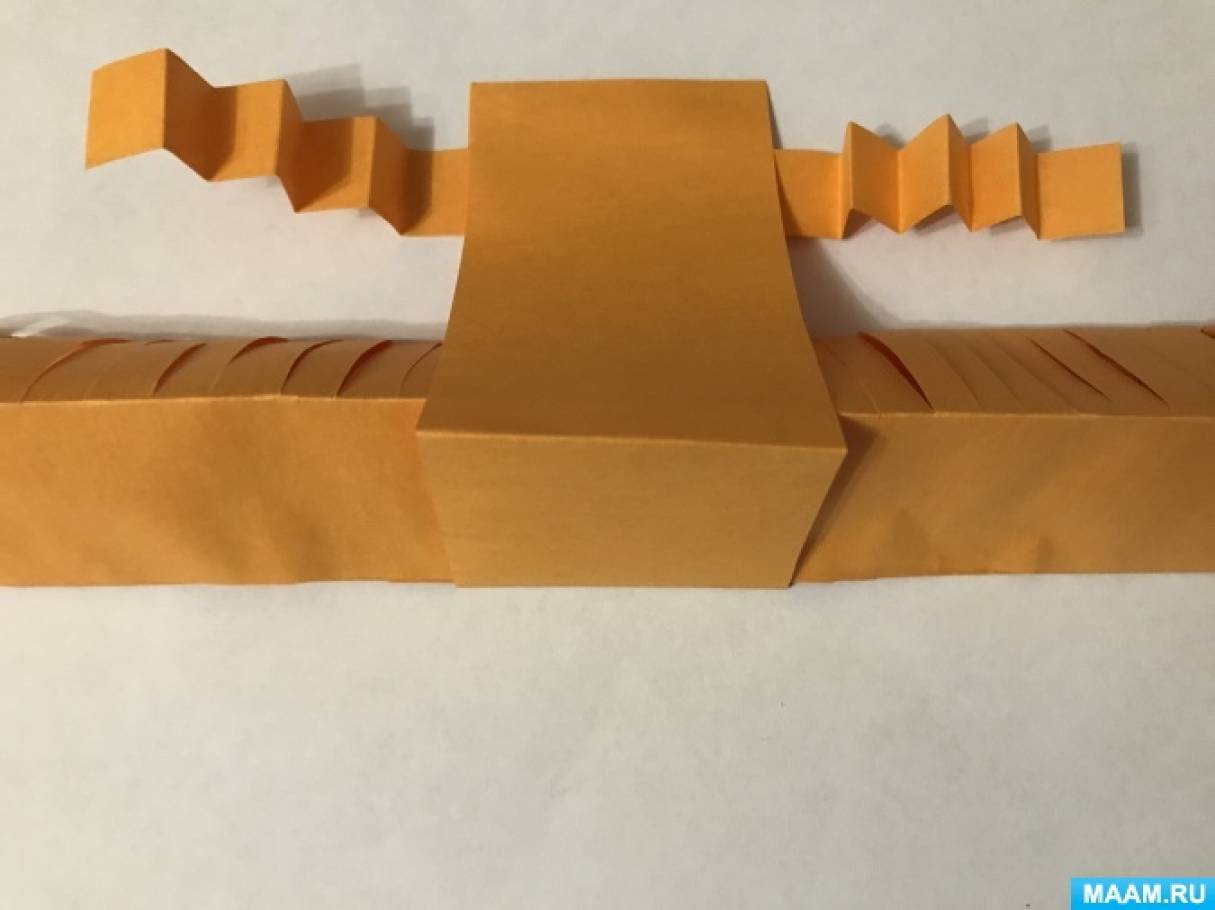
Найдем середину и склеим две детали вместе — это туловище с ногами и руками.
Отрежем полоску 4см х 8см, сложим пополам и приклеим к верхней части туловища – это голова.
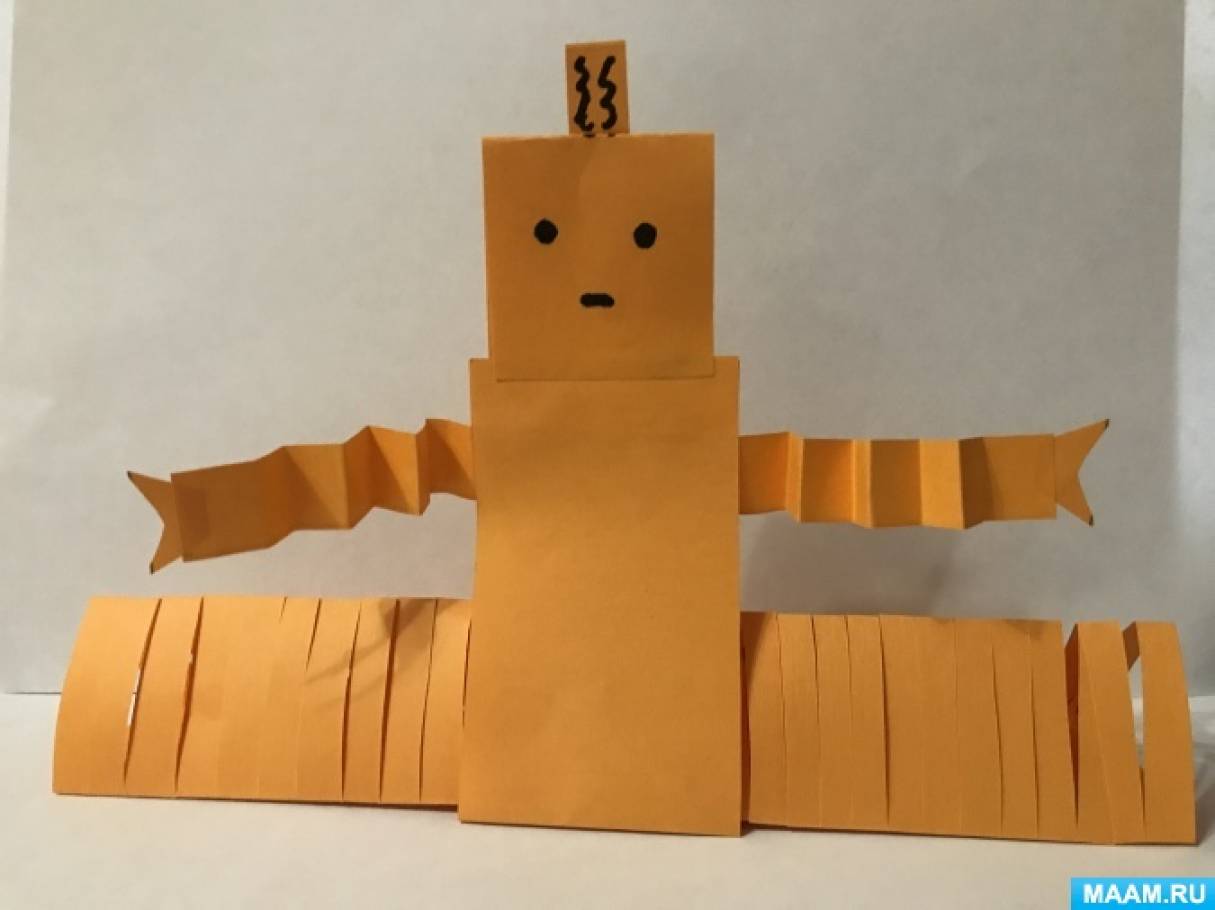
Нарисуем фломастером глаза и рот.
Вырежем и приклеим антенны, ладошки – крючки.

Скотчем приклеим шпажки к ногам.

Шагающий робот готов. Если нет шпажек можно вырезать картонные полоски, можно использовать прищепки или управлять роботом просто руками.

Спасибо за внимание!
Карта уборки робота-пылесоса xiaomi
Как настроить карту уборки робота Xiaomi:
- при помощи камеры на корпусе устройства;
- при помощи лазерного датчика дальномера.
В обоих случая настраивания карт, искусственный интеллект анализирует и сохраняет в памяти параметры помещения. С помощью этого пылесос может создать оптимальный план маршрута уборки.
Карта уборки робота-пылесоса Xiaomi может быть настроена как в автоматическом, так и в ручном режиме. И в том, и в другом случае устройство, по сохраненным ранее параметрам помещения, создает маршрут уборки.
Для ручной настройки карты робота Xiaomi в приложении необходимо ввести параметры квартиры. Отмечается место расположения базы. Все это делается в специальном поле. Затем нужно нарисовать виртуальные стены. Устанавливается количество проходов по каждому из квадратов и время уборки. Все изменения сохраняются. Теперь робот-пылесос готов к работе.
Автоматический способ построения карты
При первом запуске робот-пылесос начнет строить карту уборки в автоматическом режиме. При помощи камеры и лазерных датчиков происходит настройка карты робота-пылесоса. Затем, по своему составленному маршруту, техника начнет уборку помещения. Необходимо дождаться завершения процесс. После чего нужно проверить весь ли объем квартиры убрал пылесос. Если что-то осталось не убранным, нужно перезагрузить устройство, чтобы карта уборки помещения построилась заново.
Добавление робота-пылесоса xiaomi в homey
Homey — это специальное дополнение, которое позволяет собрать воедино много речевой информации и преобразовать её в голосовые команды. Для того, чтобы добавить робот-пылесос Xiaomi в Homey, нужно выполнить следующее:
- Открыть приложение Homey.
- Перейти на вкладку «Устройства».
- В правом верхнем углу нажать« ».
- В раскрывшемся списке найти свой бренд и выбрать его.
- Выбрать необходимое устройство.
- В диалоговом окне нажать «Установить».
- Следовать инструкциям на экране.
При добавление робота-пылесоса в Homey у каждого индивидуальный путь настройки, поэтому необходимо пошагово выполнить инструкцию по установке, которую выдает приложение.

Определение координат
Корректное определение координат для робота — это одно из основных требований, выполнение которого позволит гаджету работать дистанционно. Эта операция имеет несколько шагов:
- Убедиться в том, что док-станция находится в фиксированном положении.
- Дать разрешение на роботу, построить полную карту уборки квартиры. Это делается путем запуска уборки из приложения «My Home».
- Выставить координаты X и Y.
Если допущена ошибка в выставлении координат, то можно удалить настройки и пройти процедуру заново.
Обозначение границ зон
Это действие определяет количество повторных проходов одного квадрата при уборке помещения. Для этого нужно отправить пылесос к цели, нажав «Начать очистку». Особое внимание нужно уделить координатам. Качество уборки квартиры и правильность работы техники будет зависеть от того, как настроить координатное поле устройства. Количество повторений уборки может быть от одного до трёх.
Добавление комнат
Важным моментом является правильное определение количества комнат в квартире. Если это значение будет установлено неверно, то робот-пылесос не будет убирать всю площадь. Для установки комнат нужно зайти в приложение «My Home» и на специальном поле с помощью координатной системы разделить квартиру на комнаты.

Робот-пылесос Xiaomi при первом запуске может сам распознать все комнаты, и настройка карты помещения произойдет в автоматическом режиме. Также если между комнатами отсутствуют порожки, то робот будет воспринимать помещение как одну комнату. Дождавшись окончания тестовой уборки нужно проверить охват всех комнат. Если что-то пропущено, то нужно сбросить настройки и дождаться считывания помещения заново.
Это интересно: Проблемы с роботом пылесосом: робот-пылесос не заряжается, ошибка 13 Roborock, нестыковка с базой и другие возможные проблемы
В ходе эксплуатации пользователи робота-пылесоса могут столкнуться с различными проблемами. Одна из них — робот-пылесос не строит карту. Как правило, это происходит из-за неправильного указания месторасположения базы. В приложении нужно с особой точностью задать точку, на которую гаджет будет ориентироваться, потому что начало и конец уборки ориентирован именно на док-станцию. Если ее положение не фиксированное, то робот-пылесос неправильно построит карту.
Это интересно: Как подключить робот-пылесос к телефону: пошаговая инструкция и возможные проблемы
Как сбросить карту. как создать несколько карт
В процессе использования возникают ситуации, когда требуется сбросить карту уборки робота-пылесоса. Зачастую это происходит после обновления прошивки или перемещения док-станции. Чтобы произвести сброс карты уборки помещения, нужно:
- Открыть верхнюю крышку пылесоса.
- Каким-либо острым предметом (например, скрепкой) зажать кнопку Reset.
- Одновременно с Reset зажать кнопку «Домой».
- Через пять секунд отпустить Reset, а кнопку «Домой» удерживать до тех пор, пока пылесос не начнет говорить.
- Настроить заново пылесос через приложение «My Home».
Для того чтобы робот-пылесос сохранил несколько карт уборки помещения, нужно в настройках приложения «My Home» найти переключатель «Комната-Все-Зона». Выбрав пункт «Зона», добавить координаты нового помещения и сохранить изменения. В результате можно будет переключаться между картами при помощи приложения. Это нужно для того, чтобы запускать уборку в отдельно взятом помещении, а не во всей квартире.
Это интересно: Как подключить робот-пылесос к Алисе: возможные проблемы при подключении и список совместимых роботов-пылесосов с Алисой
Робот-пылесос — это отличный помощник в поддержании домашнего уюта и чистоты. Умная карта для робота позволяет за один проход убрать всю площадь квартиры. Поэтому при правильной настройке карты уборки помещения пользователи могут забыть о том, что нужно самим помыть или пропылесосить пол. Гаджет свободно работает как от персонального приложения, так и в общей системе «Умный дом». Фирма Xiaomi представляет технику, которая занимает лидирующие позиции в рейтингах и позволяет синхронизироваться с любыми гаджетами и операционными системами.
Обзор робота
Внешний вид
Вид робота уже в собранном состоянии. Что мне нравится в дизайне, — это футуристичность и минимализм, т.е. отсутствие насыщенных кричащих цветов, которыми изобилуют дешёвые игрушки. Основной цвет нейтральный — белый с умеренными вставками элементов из оранжевого и серого цвета, что неплохо сочетается.
Интересно выполнена лицевая часть робота. Вроде лицо состоит из стандартных деталей, однако как ни странно, при взгляде под определённым ракурсом, может меняться восприятие. Например если посмотреть на робота свысока, то он кажется довольно забавным, и становится похожим на бычка, но не на кролика, как нам пытались намекнуть разработчики












Размеры и вес роботаВысота 21смШирина ~18смВес 1229гр
Осмотр управляющих модулей
Основной модуль
Бело-оранжевого цвета. Наверху нанесён логотип робота, рядом с котором имеются отверстия под встроенный динамик.
Из органов управления
— всего одна оранжевая кнопка, по однократному нажатию которой модуль включается. Пиктограмма в центре кнопки при этом загорается зелёным цветом, во время зарядки — уже красным. Над кнопкой — отверстие микрофона для голосового управления роботом.
С противоположной стороны
— 4 порта подключения периферии, разъёмы
Type C
, подписаны латинскими заглавными буквами
ABCD
. В первые два подключаются два сервопривода, идущие в комплекте. В порт
С
подключается дополнительный модуль распознания цвета, который докупается отдельно.
Порт
D
служит для подключения комплектного зарядного устройства.
Сбоку
есть две симметричные Г-образные группы пазов для установки деталей конструктора. Между ними — отверстие для сброса микроконтроллера.

Размеры и вес основного модуляДлина 87.7ммШирина 71.9ммВысота 39.9ммВес 187гр
Разбор основного модуляПоловинки модуля скрепляются на 4-х шурупах, скрытых за оранжевыми заглушками из резины, поэтому он разбирается достаточно просто. Слева динамик, рядом же с ним — микрофон. Сама же плата выполнена качественно, покрыта матовой чёрной маской.
Драйвер двигателя выполнен на L6206QРадиомодуль 2.4ГГц NRF24L01, со скоростью передачи данных до 2 мегабит Микросхема FLASH-памяти 25l3233FИмеется также 8-битный контроллер STM8S003
Под платой за фиксирующей крестовиной из пластика находится собственно литиевый аккумулятор, который судя по номинальному напряжению 11.1В — трёхбаночный. От него на плату уходит три вывода В аккумуляторе под оболочкой есть бутерброд из электроники. Ёмкость аккумулятора 1650мАч
Сервоприводы
Оба — абсолютно одинаковые. Имеют продолговатую форму. С одного конца располагается приводное колесо с неглубокими отверстиями крестовой формы. От другого же конца отходит плоский кабель Type C, длина которого 29 см. Кабель довольно плотный. Хлипким его точно не назовёшь. На корпусе также имеются пазы под конструктор, а также наклейки с серийным номером.










Размеры и вес одного сервоприводаДлина 111.8ммШирина 36ммДлина кабеля 29смВес 82гр
Разбор одного сервоприводаЗаметно труднее разобрать этот модуль, поскольку простого откручивания 4-х шурупов здесь уже не достаточно. Помимо этого нужно отделить половинки приводного колеса и, самое сложное — снять белую крышку, которая держится на защёлках.
КомплектующиеСамая многочисленная часть. 1086 деталей. При ближайшем рассмотрении можно увидеть, насколько качественно они выполнены. Всего используется 6 цветов — черный, белый, оранжевый, светло-серый, тёмно-серый, и синий. Рассмотрим их поближе.
Сборка
Дополнительная информация
Предварительно я немного рассортировал детали по ячейкам таким образом

Все не поместились, поэтому остальная часть, в основном обшивка и звенья гусеничной ленты, осталась лежать неподалёку
Открываем первую страницу инструкции. На мини картинке слева наверху обозначено, что мы будем собирать шасси танка. В двух рамках чуть правее нарисованы необходимые на данном этапе детали и их количество. 
Но когда ручонки тянутся к длинному крепёжному стержню светло-серого цвета, то в какой-то момент не совсем понятно, а какой длины его подбирать. На этот случай внизу той же страницы нарисована другая рамка с деталью масштабом 1:1, для прикладывания стержня уже к нему, чтобы не ошибиться. Причём обратите внимание, стержни эти бывают как простые
так и с шляпкой на конце, на рисунке и в реальности это отчётливо видно
подобные масштабные рисунки будут попадаться и для балок со сквозными отверстиями, хотя дополнительно будет указываться число этих самых отверстий
Теперь по образу и подобию начинаем потихоньку собирать шасси танка

Попутно — узлы трансмиссии

Цепляем карданный вал

Прикрепляем сервоприводы


В отверстия сервоприводов с двух сторон помещаем крепёжные втулки синего цвета, — одна из самых многочисленных деталей в наборе
Чёрные крепёжные втулки, которых тоже очень много
Нередко придётся делать составные втулки вроде этих

На стержни надеваем шестерёнки с двух сторон
Удлиняем карданный вал за счёт стержня
Шестерёнка там, шестерёнка здесь. Собираем другой узел трансмиссии, который затем помещаем в основную сборку. Шлейфы обоих двигателей надо будет пропустить в проёмы, как показано на фото чуть ниже



Вид с обратной стороны
Наращиваем конструкцию, усиливаем ее






Тем временем потихоньку отделываем шасси бронёй

При наложении брони под большим углом на передней стороне будут использоваться крепёжные узлы такого вида


Пока перебираемся к сборке колёсной базы


На шасси подготавливаем посадочную платформу для туловища робота
В левой части — крышка переднего нижнего капота
Облепляем и эту деталь бронелистами


Устанавливаем верхнюю часть с обвесом на верхнюю часть шасси
Отделка задней стороны

Устанавливаем чёрные большие шестерёнки с обоих сторон 
Немного декора

Защита бронёй боковых сторон
Почему-то облачко-пакостницо вспомнилось из «Марио»
Цепляем обвес
Собираем гусеничную ленту, последовательно сцепляя все звенья по 42шт., замкнув ленту уже на колёсах



Задний капот делаем, используя остатки звеньев гусеницы

Теперь приступаем к строительству туловища робота






Что будет помещаться во внутрь, догадаться нетрудно — основной модуль
Туловище готово, но не совсем

Построение руки-пулемёта мы также будем начинать со сборки шестерёночных узлов, однако они будут независимы от ходовой части танка. Шестерёнка, что чёрная, слева внизу — будет служить для ручной регулировки высоты поднятия рук-пулемётов.
Также «обшиваем» постепенно белыми бронелистами
Сборка пулемётной части

Готовая рука
Состряпав вторую точно такую же, можно уже заняться вооружением робота

Загружаем уже модуль «жизнеобеспечения» 🙂
Без снаряги тоже никак, вешаем ему на спину ракетоподобный рюкзачок

Про украшения тоже не забываем. Устанавливаем гофрированную трубку
Кажется, он чему-то удивлён. Ну конечно, ходить пока нельзя 
Последний этап сборки — воссоединение двух половин. Подключаем кабели сервоприводов в основной блок.
Что осталось в коробке
Создание роботов из бумаги
Сделать робота из бумаги легко, если придерживаться инструкций, будь то простое или модульное оригами. Схема с рисунками и указания позволят с легкостью выполнить задание.
После подготовки материала приступают к работе, выполняя ее пошагово.
- Необходимо взять лист бумаги, сложить его в виде квадрата, и отрезать оставшуюся часть. Для работы будет использоваться только квадрат. Необходимо сложить его по диагонали согласно рисунку, а затем подвернуть так, чтобы углы листа соединились в центре.
- Далее следует согнуть верхний уголок вниз, а правую сторону сложить к левой стороне.
- Затем нужно взять за край бумагу сверху и отодвинуть в сторону так, чтобы получилась фигура, как на рисунке.
- После этого приступают к складыванию квадрата с другой стороны. Необходимо приподнять серединку верхнего квадрата, проделав то же действие с другой стороны. Как результат, получится базовая фигурка «Птица». Концы бумаги, которые находятся сверху, нужно опустить, чтобы получить модель, как на рисунке. Аналогичные действия нужно проделать с иной стороны.
- В итоге получается фигурка с крыльями, их необходимо сложить в середину и опустить вниз. Далее следует поднять нижний треугольник вверх, направив в центр боковые крылышки.
- После этого нужно поменять верх заготовки с низом. Сделав это, приступают к складыванию верхних крыльев, направляя их к середине. В результате получаются ромбы сверху и сзади, их нужно сложить пополам, повернув наверх. Далее складывают боковой уголок в центр и загибают его внутрь. Те же действия производят с оставшимися углами.
- Получившуюся фигуру необходимо перевернуть, и вытащить треугольник вперед как раз посередине.
- Далее согласно схемам приступают к складыванию самого трансформера.
- В результате получается самолет. Осталось доделать голову и ноги с руками, чтобы получился робот.
Итак, бумажная поделка в виде серебряного робота, выполненная в технике оригами, готова.
Можно выполнить модель и по-другому.
Для этого нужно взять лист бумаги квадратной формы коричневого цвета (21х21 см), три полоски желтого цвета (7х21 см) и кусочек белой бумаги (7х10 см).
Ход работы.
- Чтобы сделать поделку, нужно взять лист коричневого цвета и сложить его по диагонали.
- Затем лист разворачивают, и правую сторону заворачивают к центру. То же самое делают с другой стороны.
- После этого нижнюю часть подворачивают к центру, складывают заготовку. Получилась фигурка в виде треугольника. Важно хорошо проглаживать линии в процессе работы.
- Далее нужно подвернуть каждую сторону треугольника, и загнуть нижние уголки.
- Заготовку разворачивают и складывают пополам, отступив 1 см, и еще раз складывают. В результате получается нижняя часть робота.
- Приступают к сооружению иных деталей. Для этого берут полоску желтой бумаги, складывают край ее с одной и другой стороны, затем заворачивают посередине и выворачивают так, чтобы получился треугольник. Те же действия делают с другой стороны.
- Готовую заготовку с треугольными краями с каждой стороны разворачивают, затем складывают по горизонтали, и подворачивают края с каждой стороны. Треугольники далее нужно подвернуть к центру и загладить.
- Затем следует элемент, находящийся на противоположной стороне, вложить в образовавшуюся деталь. Аналогично этой детали делают следующий элемент, его боковые части распрямляют и вкладывают в первый элемент.
- После этого нужно взять третью полоску желтого цвета, сложить ее и разрезать на 2 части. Далее прямоугольную заготовку складывают пополам, заворачивают уголки, а боковые стороны подворачивают к центру и сворачивают, затем выворачивают верхний уголок. Те же действия проводят с другим кусочком желтой бумаги.
- Производят сборку деталей. Для этого соединяют элементы желтого и коричневого цветов, дополняют руками, вкладывая их сзади спинки робота.
- На заключительном этапе для заготовки используют кусочек белой бумаги. Каждый уголок ее складывают к центру, затем подворачивают к середине, чтобы получился треугольник, уголки которого загибают внутрь.
- Затем деталь сгибают пополам, и каждую сторону заворачивают, соединяя их в центре. Получилась голова для робота, ее крепят к основе. Чтобы она лучше держалась, можно подклеить ее клеем.
Подробней ознакомиться с работой можно, изучив видео.

