

- Введение · clover
- Coex pix
- Coex клевер 4 worldskills russia — конструктор ррограммируемого квадрокоптера для соревнований
- Pixracer
- Инструкция по настройке полетного контроллера pixracer конструктора программируемого квадрокоптера “кпк 3”
- Конструктор программируемого квадрокоптера «coex клевер 4 code» клв-4-cod купить онлайн – educube
- Конструктор программируемого квадрокоптера «coex клевер 4 code» оптом. цена: 89000 руб.
- Подключение полетного контроллера
- Размер крепежа
- Сборка рамы
- Установка esc и pdb
- Установка led ленты и ножек
- Установка raspberry pi
- Установка защиты
- Установка моторов
- Установка полетного контроллера
Введение · clover
«Клевер» — это учебный конструктор программируемого квадрокоптера, состоящего из популярных открытых компонентов, а также набор необходимой документации и библиотек для работы с ним.
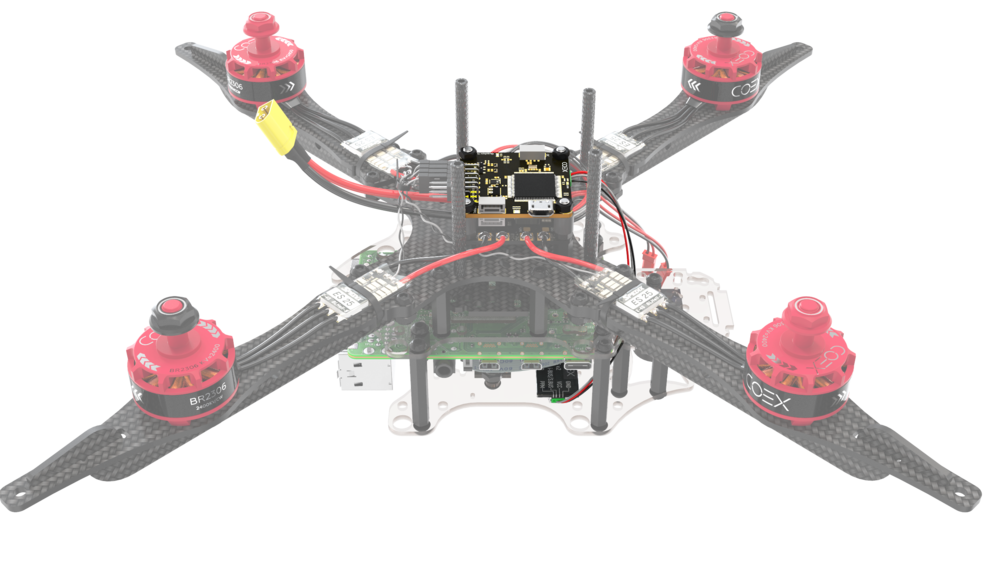
Набор включает в себя полетный контроллер COEX Pix с полетным стеком PX4, Raspberry Pi 4 в качестве управляющего бортового компьютера, модуль камеры для реализации полетов с использованием компьютерного зрения, а также набор различных датчиков и другой периферии.
Платформа Клевера также включает в себя преднастроенный образ для Raspberry Pi в полным набором необходимого ПО для работы со всей периферией и программирования автономных полетов. Исходный код платформы Клевера и данной документации открыт и доступен на GitHub.
Если вы детально изучили документацию, но так и не нашли ответа на свой вопрос, напишите в чат техподдержки и наши специалисты вам с радостью ответят: @COEXHelpdesk.
Также у нас есть чат для программистов, которые разрабатывают под PX4, автономную навигацию в помещениях и рои дронов: @DroneCode.
Вы можете скачать PDF-версию этой документации. The English version of this documentation is available.
Coex pix
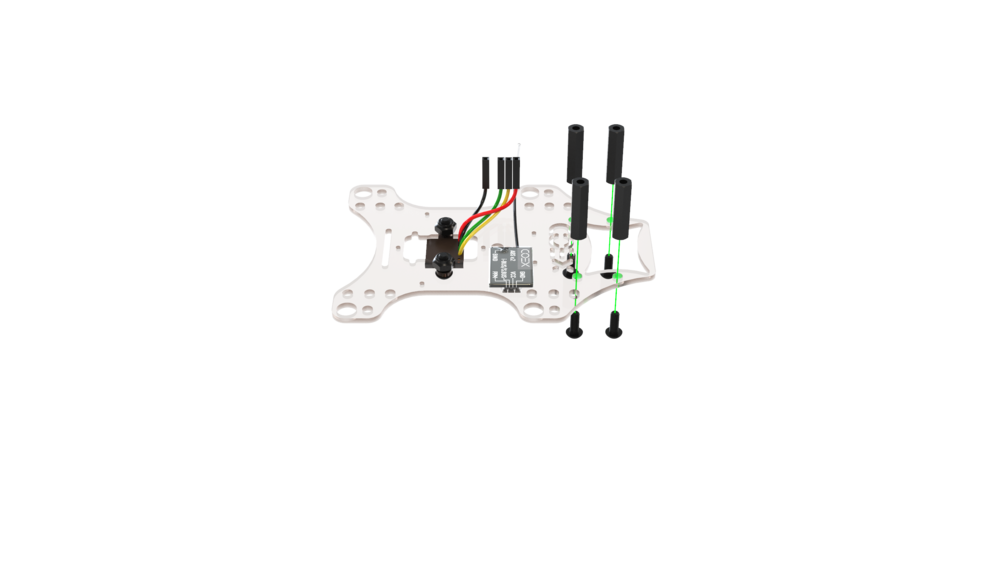
Перед установкой демпферных стоек, накрутите 2 слоя нейлоновых гаек, для более прочного крепления или откусите лишнюю резьбу с помощью бокорезов.
Закрепите плату распределения питания с помощью нейлоновых гаек, сверху установите демпферные стойки.
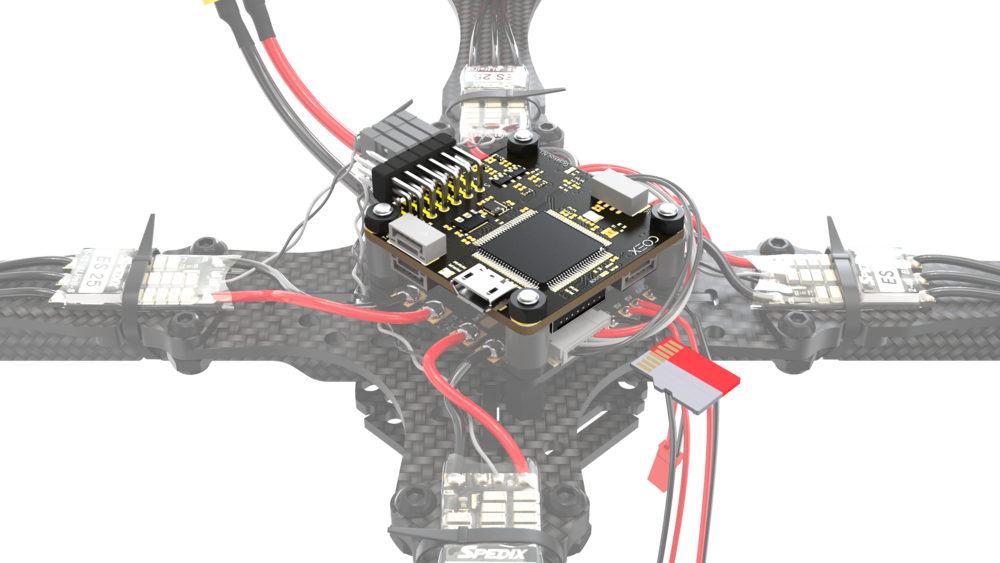
Установите полетный контроллер и закрепите нейлоновыми гайками.
Вставьте флеш-карту для записи логов в полетный контроллер.
Coex клевер 4 worldskills russia — конструктор ррограммируемого квадрокоптера для соревнований
2. Факт использования сайта Компании подтверждает однозначное и безоговорочное согласие Пользователя с настоящей Политикой, в том числе с условиями обработки его персональных данных. При отсутствии согласия Пользователя с настоящей Политикой и условиями обработки его персональных данных Пользователь должен прекратить использование сайта и/или сервиса Компании. Новая редакция настоящей Политики вступает в силу с момента её размещения на сайте copter-express.ru/privacy, если иное не предусмотрено новой редакцией настоящей Политики.
3. Для регистрации при покупке Пользователю может предлагается заполнение форм регистрации. При использовании сайта Компании Пользователь обязуется предоставить достоверную и актуальную информацию по вопросам, указанным в формах регистрации.
4. В соответствии с настоящей Политикой информация, обрабатываемая Компанией, включает в себя: персональные данные Пользователя в объеме, указанном в формах регистрации и иная информация, обработка которой необходима в соответствии с действующим законодательством (Федеральный закон от 27.07.2006 N 152-ФЗ “О персональных данных”)
5. Настоящим Пользователь принимает решение о предоставлении информации, в том числе персональных данных, и дает Компании согласие на обработку информации, в том числе персональных данных свободно.
Перечень информации включает в себя: фамилию, имя, отчество, адрес электронной почты, номера телефонов, паспортные данные (при необходимости), должность, а также любая иная информация, относящаяся к субъекту персональных данных. Пользователь дает согласие на сбор, запись, систематизацию и хранение персональных данных и иной информации.
6. Целями обработки информации, в том числе персональных данных, являются: использование Пользователем сайта Компании; исполнение Компанией и Пользователем договоров, а также совершение действий необходимых для заключения договоров и оплаты; идентификации Пользователя; связь с Пользователем; подготовка и направление ответов на запросы; направления уведомлений о новых сервисах, продуктах, мероприятиях; предоставление актуальной информации.
7. При обработке персональных данных Пользователей Компания руководствуется Федеральным законом № 152-ФЗ «О персональных данных». Компания при обработке персональных данных принимает необходимые правовые, организационные и технические меры для защиты персональных данных от неправомерного или случайного доступа к ним, уничтожения, изменения, распространения или копирования, а также от иных неправомерных действий в отношении персональных данных в соответствии с требованиями законодательства РФ.
8. Пользователь вправе в любое время изменить или удалить предоставленную информацию, воспользовавшись соответствующим сервисом или обратившись Компанию по реквизитам, указанным в настоящей Политике или на сайте.
9. Пользователь самостоятельно несет ответственность за свои действия, связанные с использованием сайта и Компании, в том числе, если такие действия приведут к нарушению прав и законных интересов третьих лиц, а также за соблюдение законодательства РФ. Пользователь обязуется возместить убытки, причиненные Компании и/или третьим лицам в результате неисполнения или ненадлежащего исполнения Пользователем обязательств, предусмотренных настоящей Политикой и/или законодательством РФ.
10. Все объекты, в том числе произведения, доступные при помощи cайта и/или сервисов Компании, включая: элементы дизайна, текст, графические изображения являются объектами исключительных прав Компании и других правообладателей. Использование указанных объектов возможно только в рамках функционала, предлагаемого сервисом. Никакие объекты не могут быть использованы иным образом без предварительного разрешения правообладателя. Под использованием подразумеваются, в том числе: воспроизведение, копирование, переработка, распространение на любой основе и другие способы в соответствии с законодательством РФ.
11. Положения настоящей Политики регулируются в соответствии с законодательством РФ. Если по тем или иным причинам одно или несколько положений настоящий Политики будут признаны недействительными, это не оказывает влияния на остальные положения.
12. По всем вопросам Пользователь может направить обращение в адрес Компании по следующим реквизитам: ООО «Коптер Экспресс Технологии» ИНН 9729014181; КПП 772901001; ОГРН 1167746602320
Юридический адрес 143026, г. Москва, ул. Луговая д. 4, к. 5. Адресс для корреспонденции: 109316, г. Москва, Волгоградский проспект, дом 42, корп 5.
Pixracer
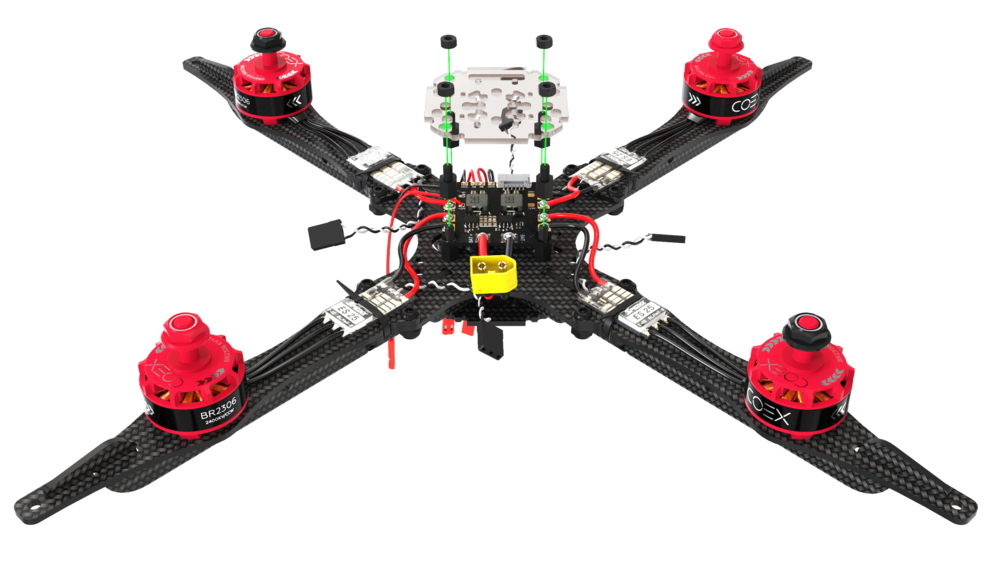
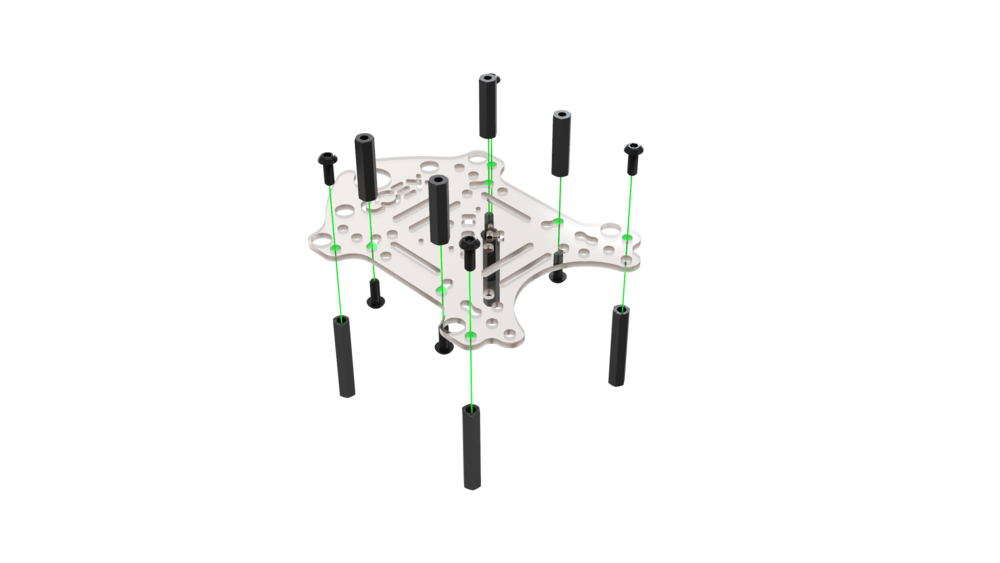
Закрепите плату распределения питания с помощью нейлоновых стоек 6мм.
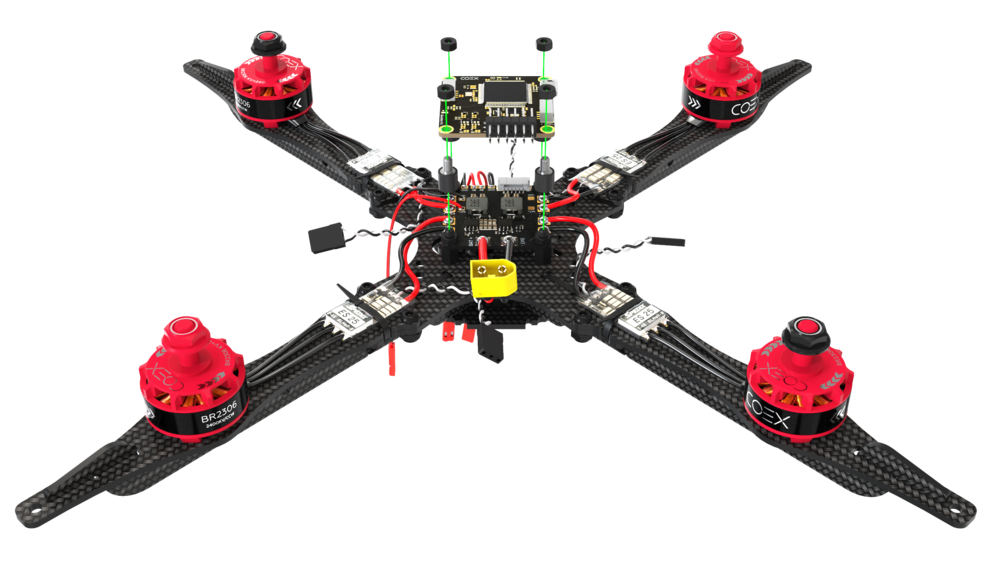
Установите малую крепежную деку и закрепите ее с помощью нейлоновых гаек.
Склейте 3–4 слоя двустороннего скотча, приклейте его в центр малой деки и установите сверху Pixracer.
Вставьте флеш-карту для записи логов в полетный контроллер.

Инструкция по настройке полетного контроллера pixracer конструктора программируемого квадрокоптера “кпк 3”
Конструктор беспилотного летательного аппарата может применятся для исследований и разработок. Штатный полетный контроллер позволяет менять программное обеспечение, дорабатывать существующее, а также разрабатывать его самостоятельно. Возможно использование различных типов полетных контроллеров.
Компания разработчик постоянно проводит работу по совершенствованию конструктораQUADRONE серии КПК, поэтому поставляемые части могут отличаться в лучшую сторону по качественным параметрам, от указанных в данном руководстве.
Характеристики:
| Размер по диагонали | не менее 196 мм |
| Время зарядки | до 30 минут |
| Максимальное время в воздухе | до 15 минут |
| Радиус действия пульта | до 100 метров |
| Тяга ВМГ | не менее 400 г |
| Материал рамы | поликарбонат |
| Аккумулятор | не менее 1600 мАч; |
| Моторы | 2205/2306 |
Количество показателей телеметрии – не менее 30
Возможность соединения с наземной управляющей станцией QGroundControl по Wi-Fi
Возможность беспроводной калибровки датчиков
Возможность построения графиков по параметрам телеметрии
Возможность программирования автономного полета квадрокоптера на языке программирования Phyton
Комплектация поставки:
- Электромоторы 4 шт
- Регулятор скорости (ESC) 4-в-1 или 4 шт
- Полетный контроллер PixHawk / PixRacer
- Пропеллеры комплект
- Аккумулятор 2 шт
- Зарядное устройство для аккумуляторов
- Разборная рама-конструктор с защитой пропеллеров
- Набор крепежа для сборки конструктора
- Светодиодная лента
- Кабель microUSB–USB
- Ультразвуковой датчик
- Одноплатный портативный компьютер
- MicroSD-карта с установленным ПО для одноплатного компьютера
- Камера со шлейфом
- Инструкция по сборке и настройке в печатном виде
- Учебно-методические материалы
- Набор ArUco-маркеров
2. Прошивка:
Конструктор программируемого квадрокоптера «coex клевер 4 code» клв-4-cod купить онлайн – educube
Состав набораВидео
- Полетный контроллер COEX Pix
- Плата распределения питания COEX PDB
- Регулятор оборотов COEX ESC 30А (4 шт)
- Бесколлекторный электродвигатель, COEX BR2306, 2400 kV (4 шт)
- Пропеллер пластиковый 5040×3 (пара) (4 шт)
- BEC (источник питания) 5V 12V , 3A
- Литиевая аккумуляторная батарея, 3S LiPo 2200 mAh (2 шт)
- Индикатор уровня заряда батареи (пищалка)
- Зарядное устройство COEX Е4
- Одноплатный микрокомпьютер Raspberry Pi3 Model B
- Камера для одноплатного компьютера, Raspberry Pi 3 Camera (G)
- Лазерный дальномер CJMCU-531
- Модуль памяти, MicroSD 16 GB 10 Class с установленным ПО для одноплатного компьютера
- Плата микроконтроллера, совместимая с Arduino Nano
- Светодиодная лента адресная, 144 led/m 5V IP65, в метрах (Black)
- Кабель Micro-USB (улитка)
- Макетная плата, паячная
- Беспаечная макетная плата
- Набор резисторов
- Провод медный многожильный с силиконовой изоляцией, 14 AWG красный черный
- Термоусадка 5мм (черная красная)
- Разъёмы силовые, XT60 plug мама
- Комплект аппаратуры Flysky i6x (10 каналов) с приемником
- Кабель для симулятора
- Соединительный кабель для телеметрии и полетных контроллеров
- Комплект соединительных проводов для Arduino и макетных плат мама-мама
- Рама квадрокоптера
- Защита пропеллеров совместимая с рамой квадрокоптера
- Комплект крепежа необходимый для сборки квадрокоптера
- Комплект ручного инструмента
- Комплект ArUco маркеров (6 шт)
- Методические материалы COEX
- Комплект программного обеспечения для запуска квадракоптера COEX Клевер 4 в среде для выполнения симуляций Gazebo
?>
X
Сайт может собирать метаданные пользователя (cookie, данные об IP-адресе и местоположении).
Если, прочитав это сообщение, вы остаетесь на нашем сайте, это означает, что вы не возражаете против использования этих технологий.
LEGO, логотип LEGO, Minifigure (Минифигурка), DUPLO и MINDSTORMS являются торговыми марками и/или охраняемой авторским правом собственностью LEGO Group.
©2023 The LEGO Group. Все права защищены. Использование этого вебсайта подтверждает ваше согласие с этим.
Конструктор программируемого квадрокоптера «coex клевер 4 code» оптом. цена: 89000 руб.
Цена: 89000 руб.
Минимальный заказ: 1 шт.
Учебный набор «COEX Клевер 4 Code» предназначен для практико-ориентированного обучения школьников и студентов конструированию и прикладному программированию. Полноценно подходит для участия в инженерно-технических соревнованиях и использования в проектной деятельности в школах и университетах, как модульная open source платформа по летающей робототехнике.
Модель
СОЕХ КЛЕВЕР 4
WORLDSKILLS RUSSIA
Размер – 355x355x195 мм
Расстояние между моторам по диагонали – 234 мм
Диаметр пропеллеров – 5 дюймов
Максимальный взлетный вес – 1 кг
Максимальная скорость – 72 км/ч
Максимальное время полета – 15 мин
Диапазон рабочих температур – От 0°С до 40°С
Максимальная высота полета – 500 м
Производитель:COEX
Страна: Россия
Чтобы купить Конструктор программируемого квадрокоптера «COEX Клевер 4 CODE» оптом по цене 89000 руб., свяжитесь с поставщиком. Компания поставщик — Droneshub (ООО «Академия Дронсхаб») из города Екатеринбург (Свердловская область). Минимальная сумма оптового заказа: 5000 руб. Минимальная партия 1 шт. Доставка возможна самовывоз, транспортной компанией, автомобилем, авиатранспортом, железной дорогой, курьером. Способы оплаты: наличными, безналичная оплата, кредитные карты, электронные деньги.
Дата обновления: 02.05.2023
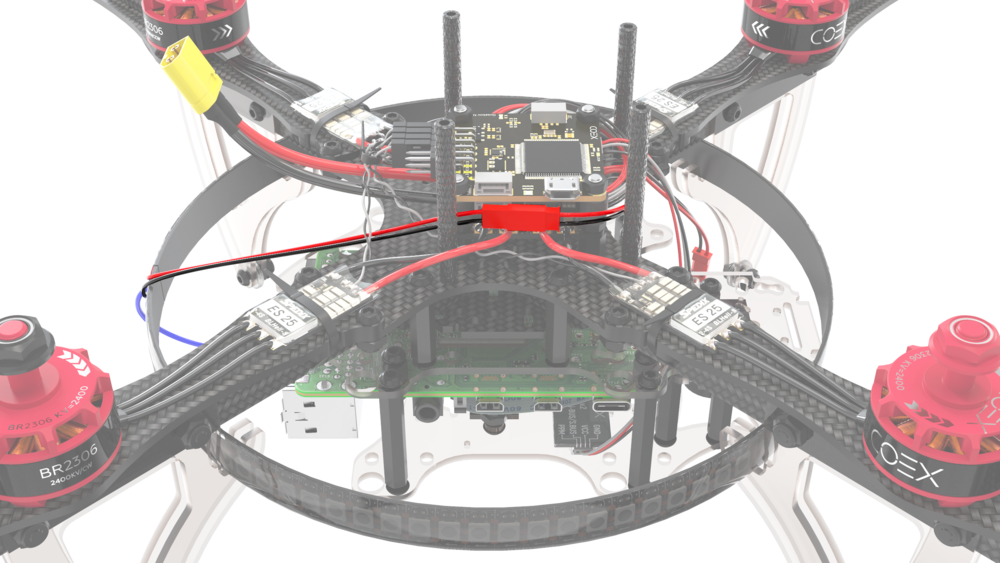
Подключение полетного контроллера
Подключите регуляторы оборотов к полетному контроллеру в соответствии со схемой.
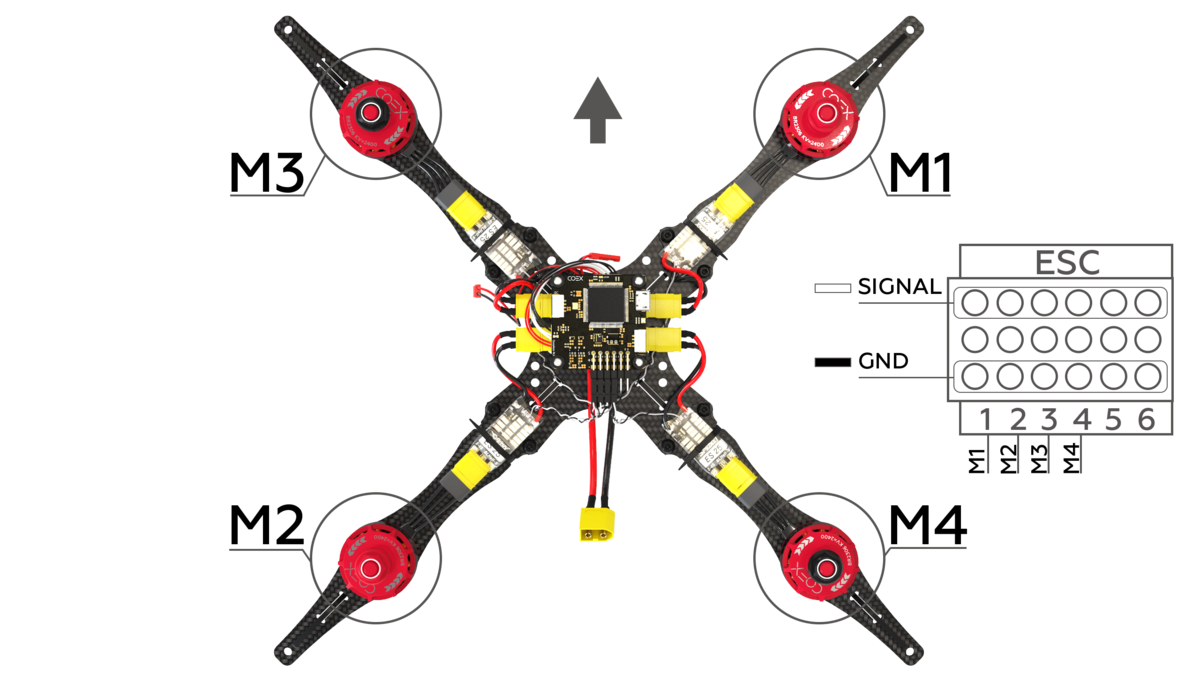
Подключите кабель питания к плате распределения питания (PDB) и соответствующему разъему на полетном контроллере.
Установите алюминиевые стойки 40 мм на винты М3х12.
Размер крепежа
Во время сборки используются винты и стойки различных размеров, использование крепежа не соответствующего размера может повредить коптер.
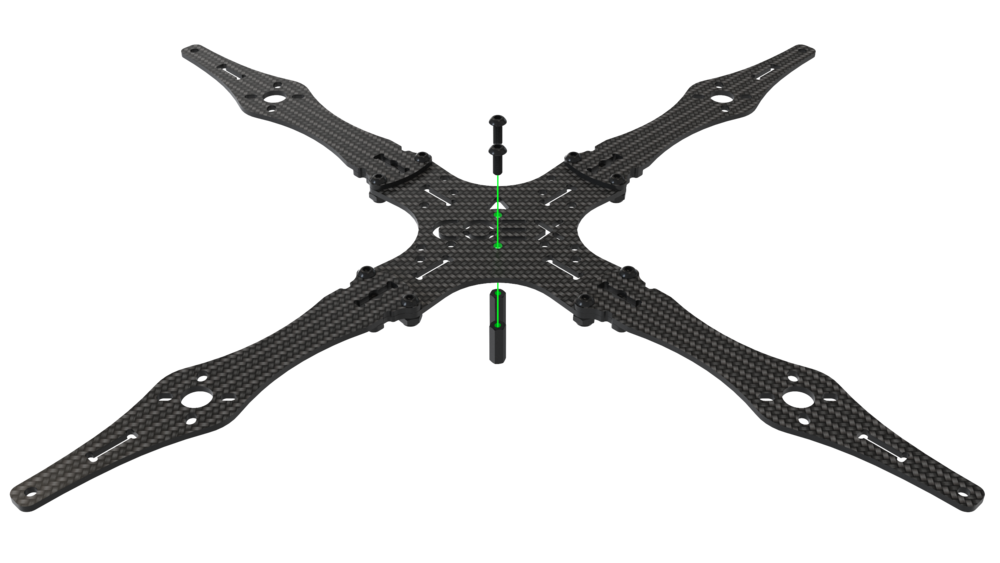
Сборка рамы
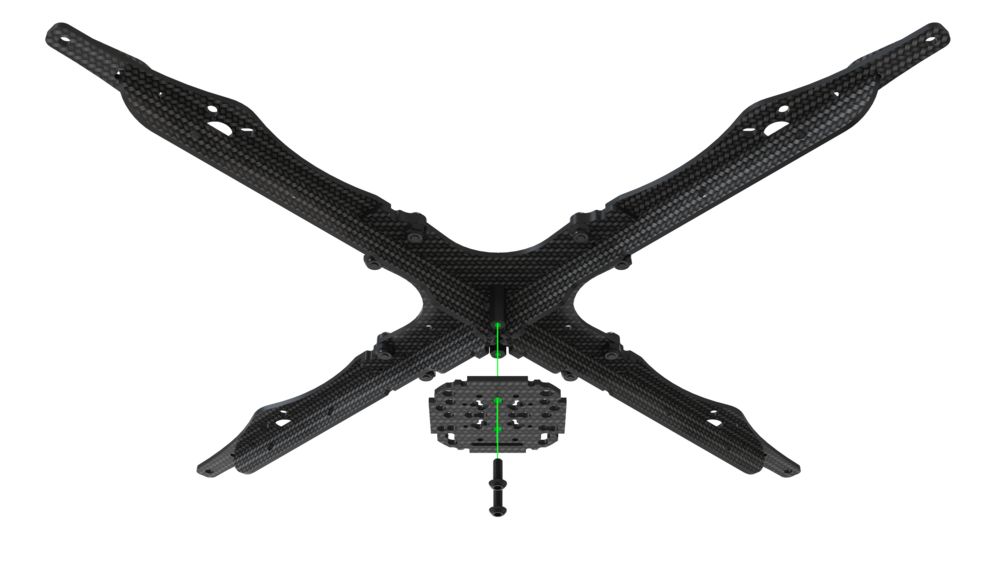
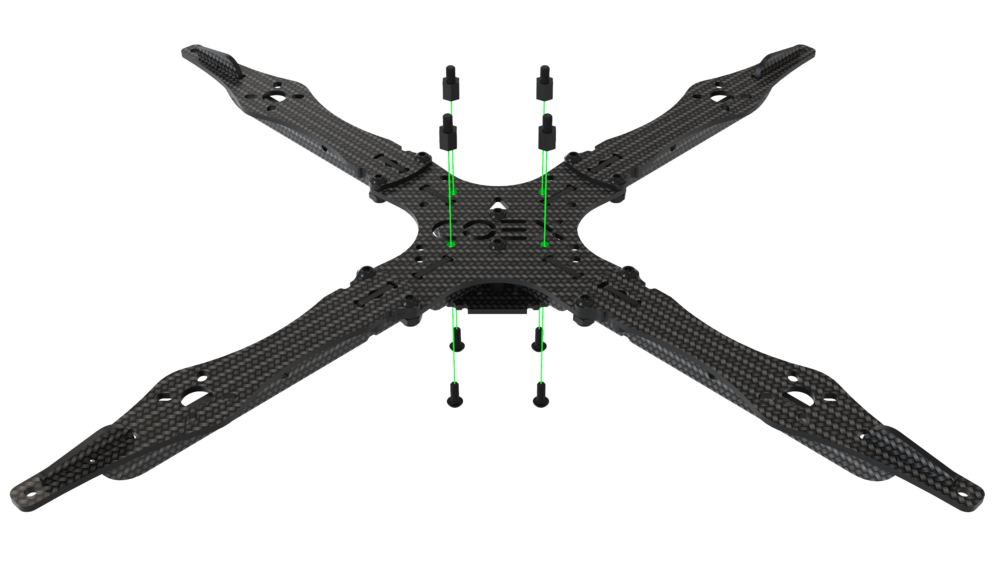
Совместите 4 луча с центральной декой, зафиксируйте их при помощи винтов М3х8 и самоконтрящихся гаек.
На центральные отверстия в главной деке установите 2 стойки 15 мм и закрепите их с помощью винтов М3х8.
Установите крючок пластины жесткости в паз на луче.

Прижмите пластины жесткости к главной деке.
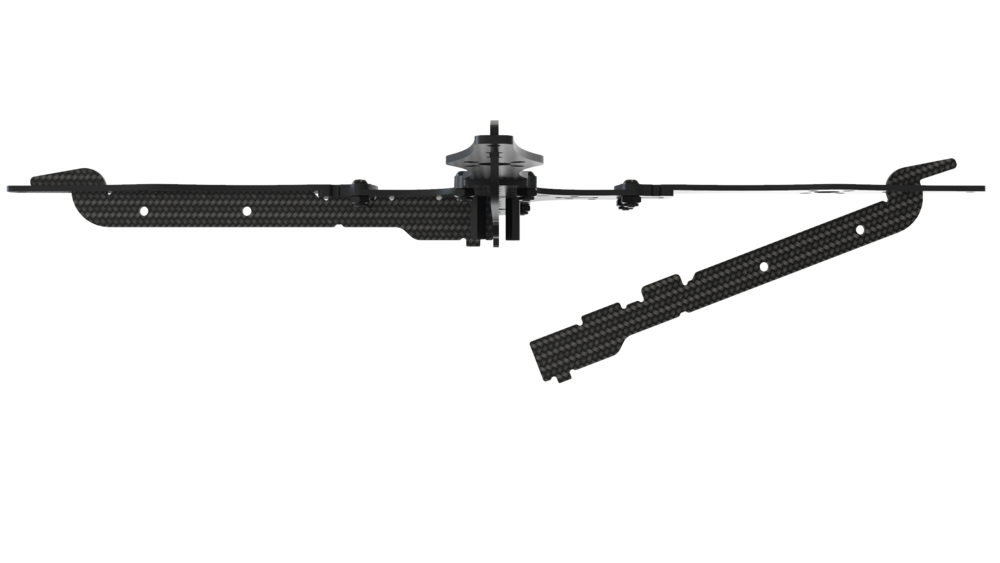
Стяните пластины жесткости с помощью малой карбоновой деки.
Установите 4 нейлоновые стойки 6мм и закрепите их с помощью винтов М3х5.
Установка esc и pdb
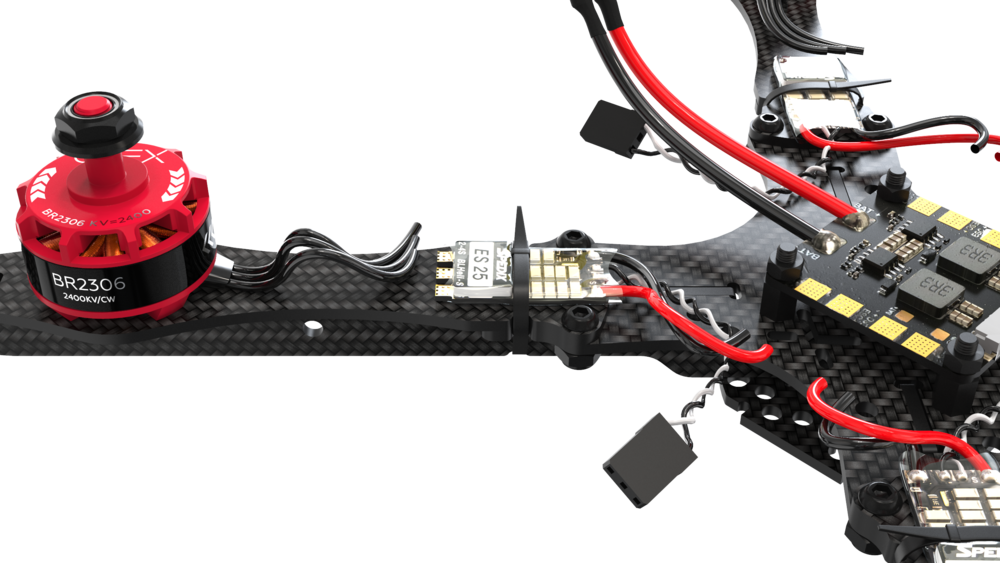
На заранее закрепленные стойки установите плату распределения питания (PDB), она должна быть установлена таким образом, чтобы силовой кабель питания был направлен в сторону хвоста коптера.
Установите регуляторы оборотов (ESC) в соответствующие места на луче.
Притяните регуляторы оборотов (ESC) хомутами.
Отмерьте необходимое количество силового провода регуляторов оборотов(ESC), и обрежьте лишнее.
Зачистите и залудите обрезанные провода.
Залудите контактные площадки на плате распределения питания.
Припаяйте силовые провода регуляторов оборотов к плате распределения питания.
Будьте внимательны к подписям контактов на плате. Красный провод должен идти к площадке с подписью , а черный к подписи –.
Обрежьте лишний фазный кабель идущий от моторов.
Зачистите и залудите фазные кабели.
Залудите контактные площадки регуляторов оборотов.
Припаяйте фазные кабели к контактным площадкам регуляторов в любом порядке.
Припаяйте 3 разъема JST мама к 2ум площадкам 5V и площадке bat .
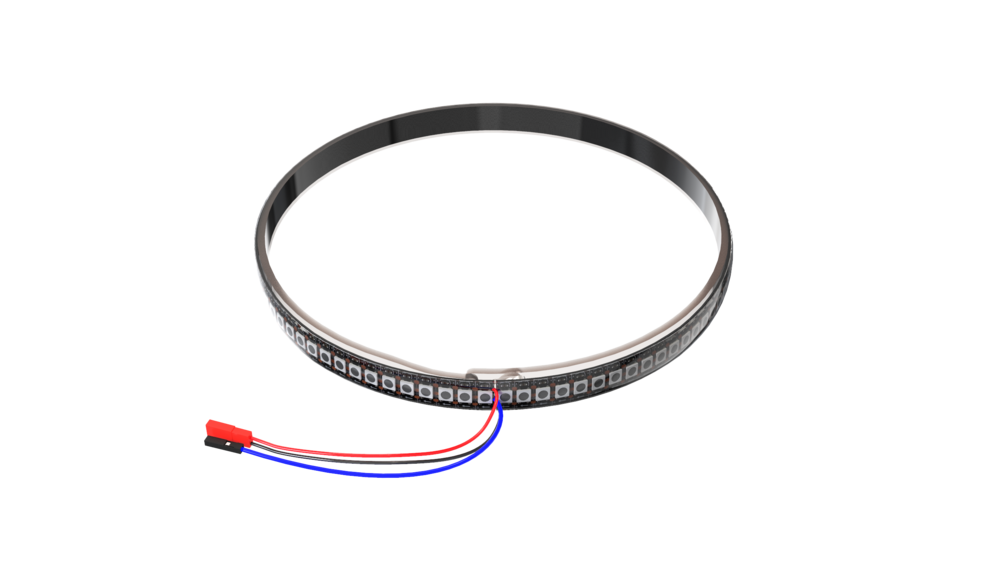
Установка led ленты и ножек
Соберите обруч для светодиодной ленты, объединив замок на концах.

Припаяйте JST-папа к площадке питания и Dupont-мама к сигнальной площадке.
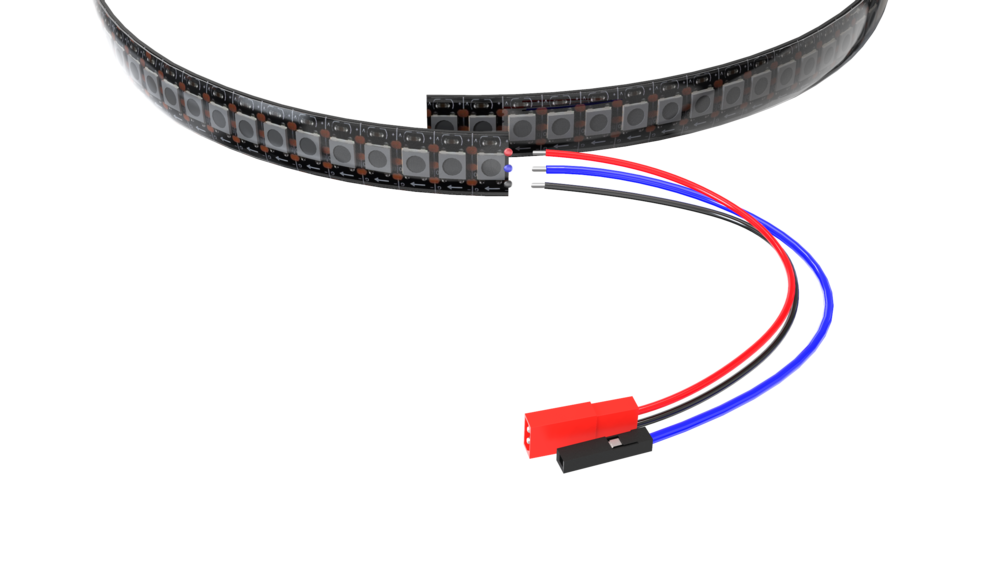
Наклейте светодиодную ленту на обруч, для большей крепкости притяните ее с помощью 3–4 хомутов.
Установите ножки на пластину жесткости с помощью самоконтрящихся гаек и винтов М3х8 используя только крайние монтажные отверстия. Снизу, между пластинами ножек, установите демпферное силиконовое колечко.
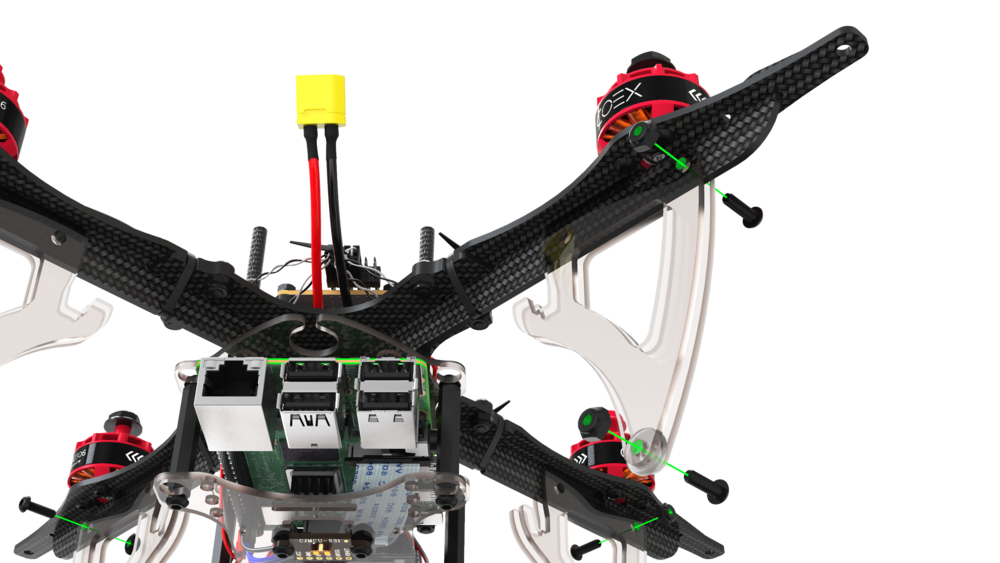
Отогните ножки назад и в специальный паз на них установите обруч со светодиодной лентой, таким образом, чтобы кабели подключения выходили с хвостовой стороны коптера.
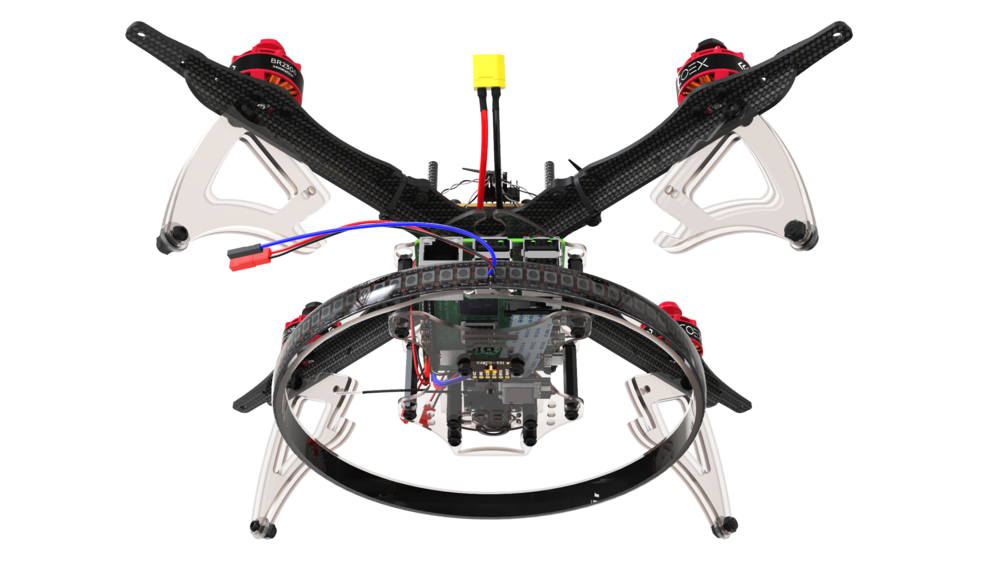
Закрепите ножки с помощью самоконтрящихся гаек и винтов М3х8.
Подключите питание светодиодной ленты в разъем JST 5V на плате распределения питания.
Подключите сигнальный выход светодиодной ленты в Raspberry Ri, к пину GPIO21.
Установите монтажную деку и закрепите ее винтами М3х8.
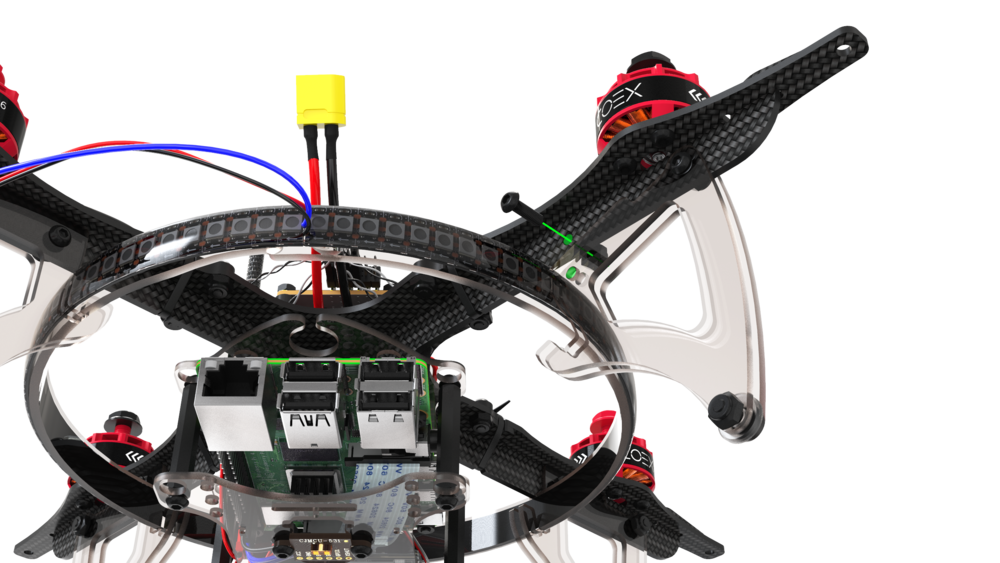
Установка raspberry pi
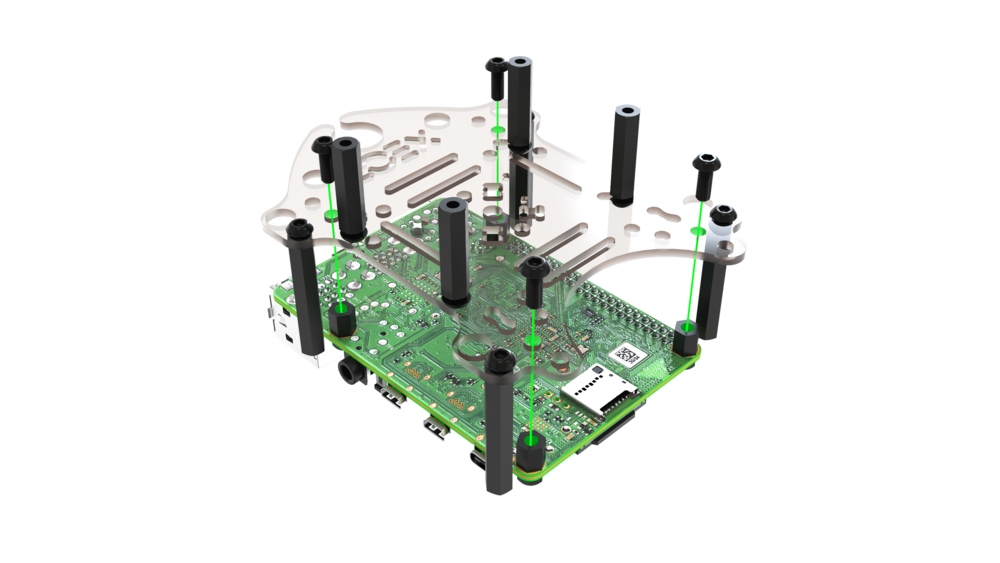
На монтажную деку установите стойки 20 мм и 40 мм, закрепите их с помощью винтов М3х8.
Нарежьте резьбу М3 в крепежных отверстиях Raspberry Pi с помощью болта М3х12.
Вкрутите в плату Raspberry Pi стойки 6мм, при необходимости закрепите их нейлоновыми гайками.
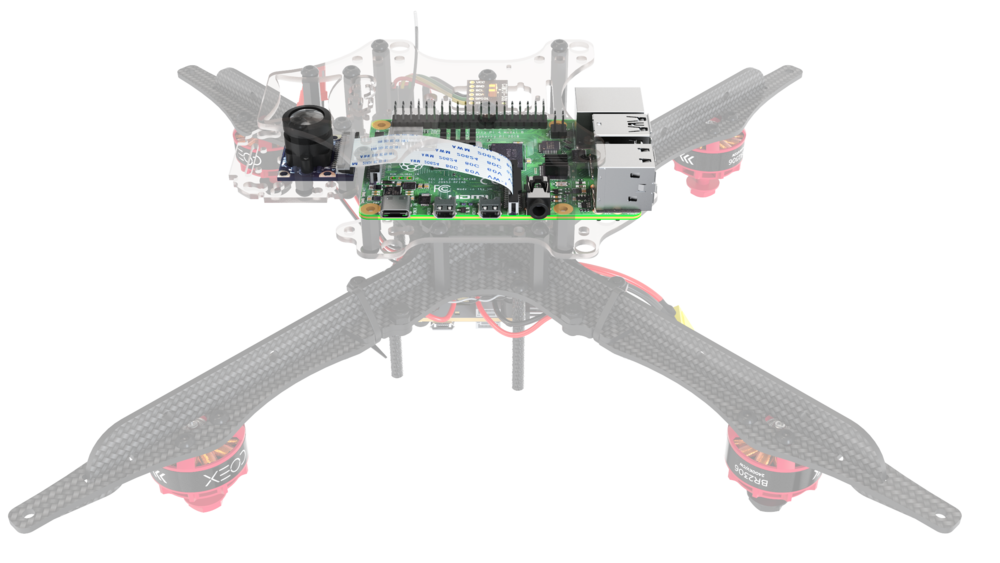
Установите Raspberry Pi на монтажную деку, закрепив ее болтами М3х6.
Установите собранный модуль в соответствующие пазы основной деке дрона.
Подключите разъем 5V JST в соответствующие пины питания Raspberry Pi.

Возьмите 4 провода Dupont, обрежьте 5–7 см кабеля и припаяйте к соответствующим пинам дальномера.
| Провод | Пин дальномера |
|——–|—————-|
| Красный | 5v |
| Черный | GND |
| Желтый | SDA |
| Зеленый | SCL |Установите дальномер на деку захвата и Приклейте радиоприемник на 3М скотч.
Устанавливайте дальномер таки образом, чтобы гайки не прислонялись к плате напрямую. При такой установке если большая вероятность повредить элементы платы.
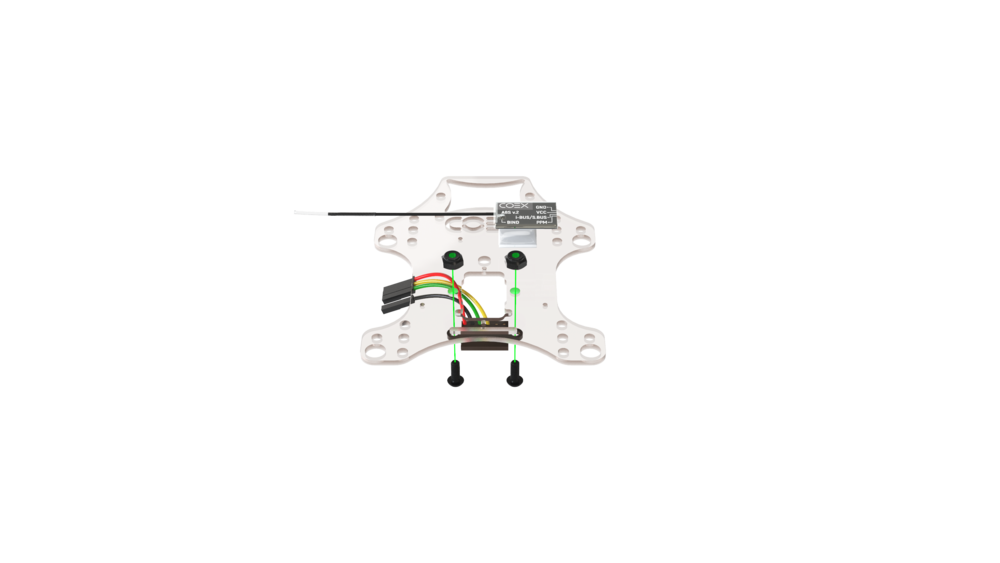
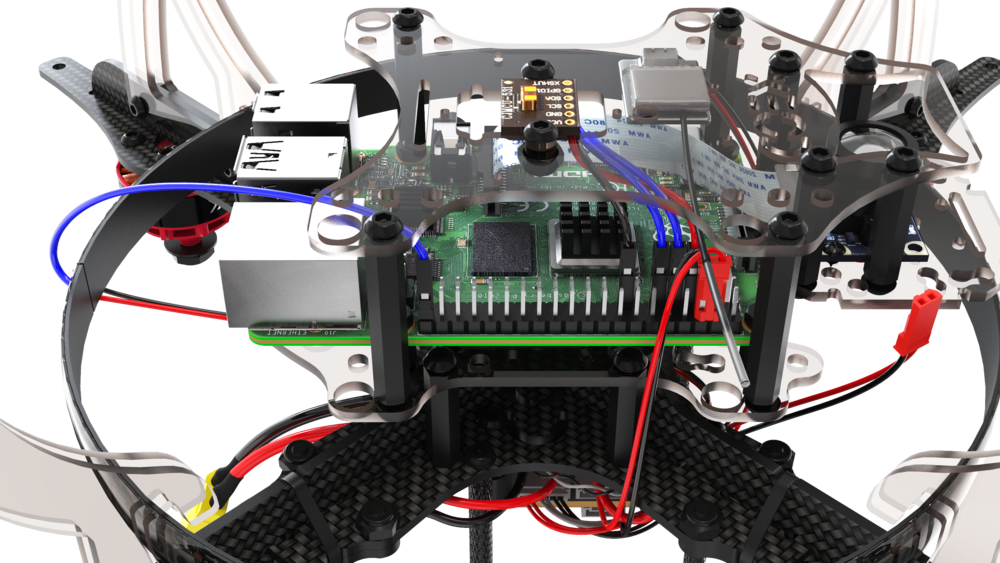
Установите 4 нейлоновые стойки 20мм и зафиксируйте их болтами М3х8.
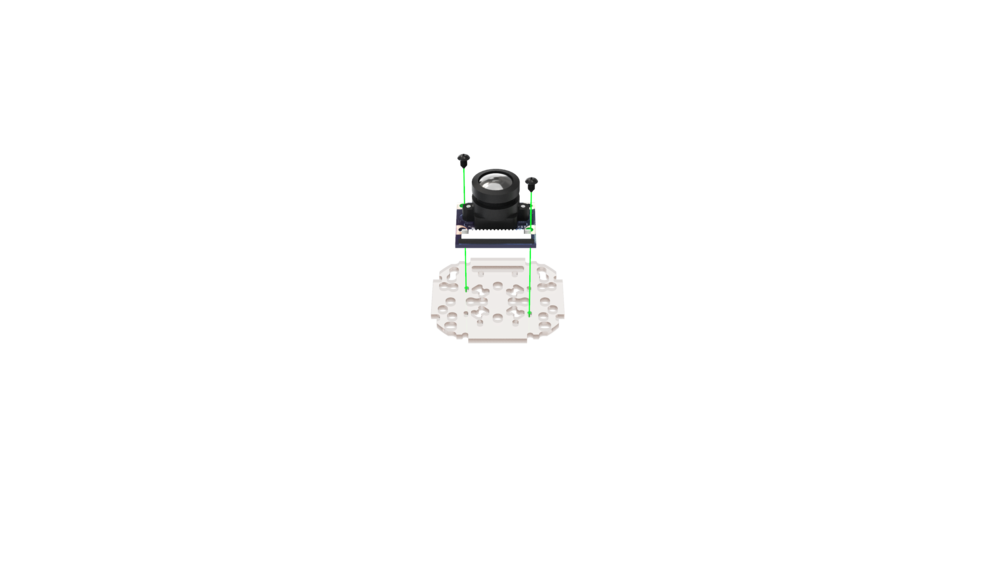
На малую монтажную деку установите камеру и зафиксируйте ее двумя короткими саморезами.
Если закрепить камеру в верхнем правом углу и шляпка самореза будет касаться элемента на камере, камера не будет работать.
Установите малую монтажную деку с камерой на стойки и зафиксируйте с помощью болтов М3х8.
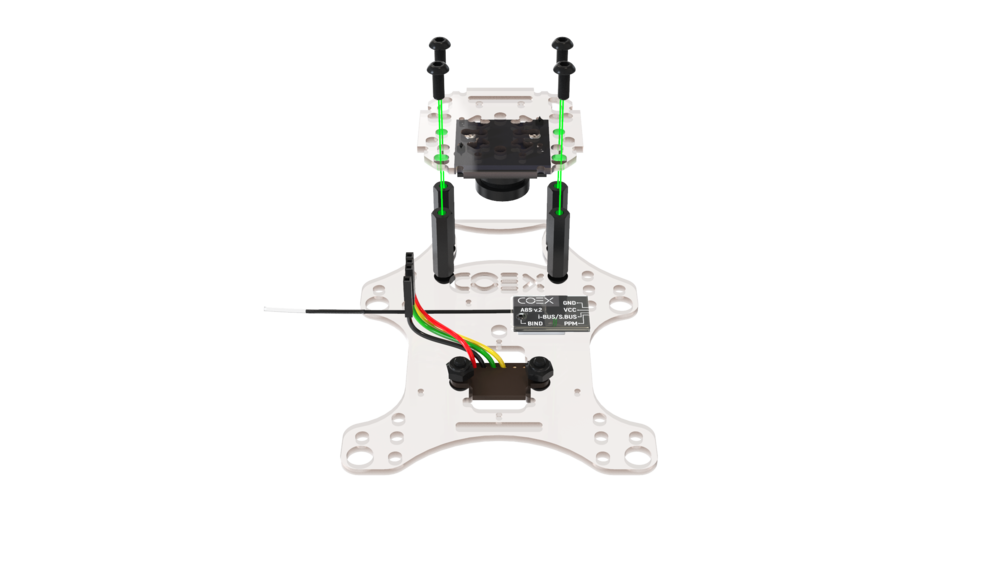
Собранный модуль установите над модулем Raspberry Pi и зафиксируйте болтами М3х8.

Соедините камеру и Raspberry Pi с помощью шлейфа.
Подсоедините дальномер к Raspberry Pi в соответствующие пины.

Соедините радиоприемник и полетный контроллер с помощью 4-х пинового кабеля.
Установка защиты
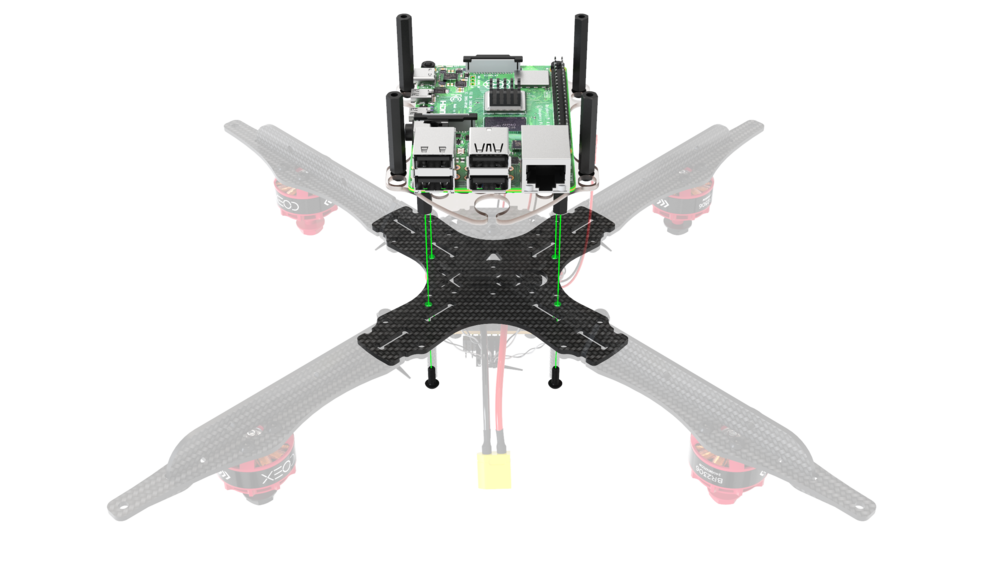
Соберите нижний уровень защиты с помощью стоек 40 мм и винтов М3х12.
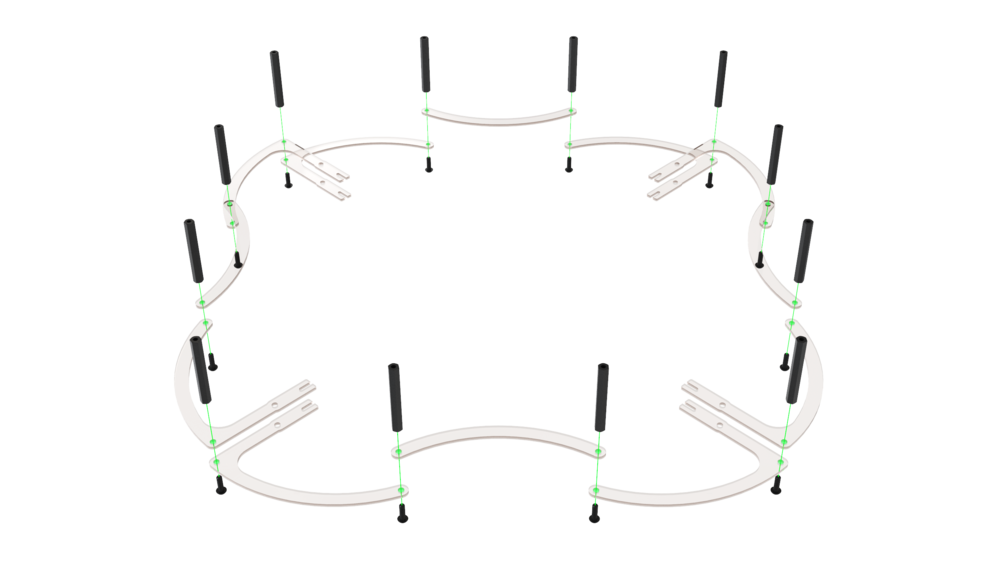
Соберите верхний уровень защиты с помощью винтов М3х12.
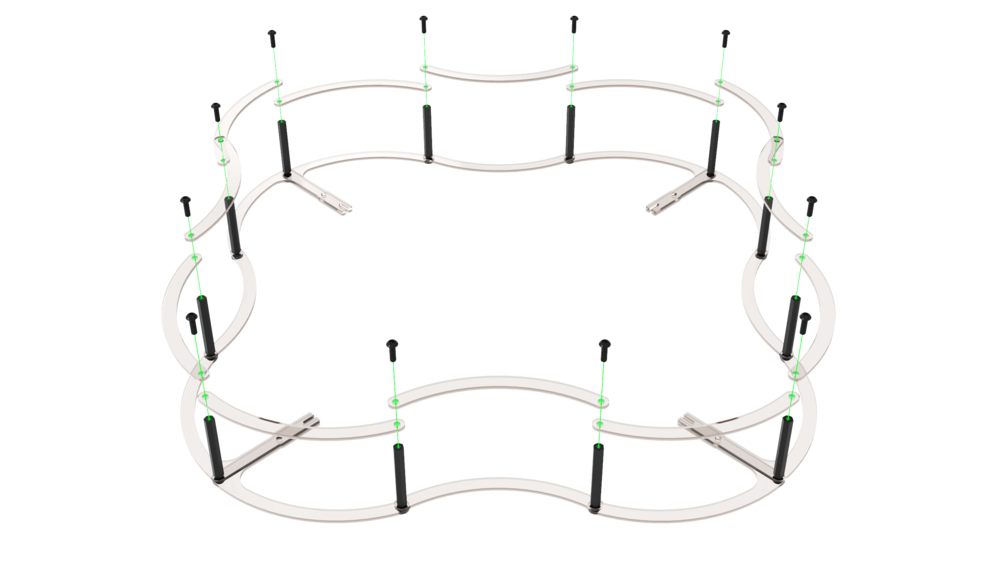
Установите защиту и закрепите на лучах с помощью самоконтрящихся гаек и винтов М3х8.
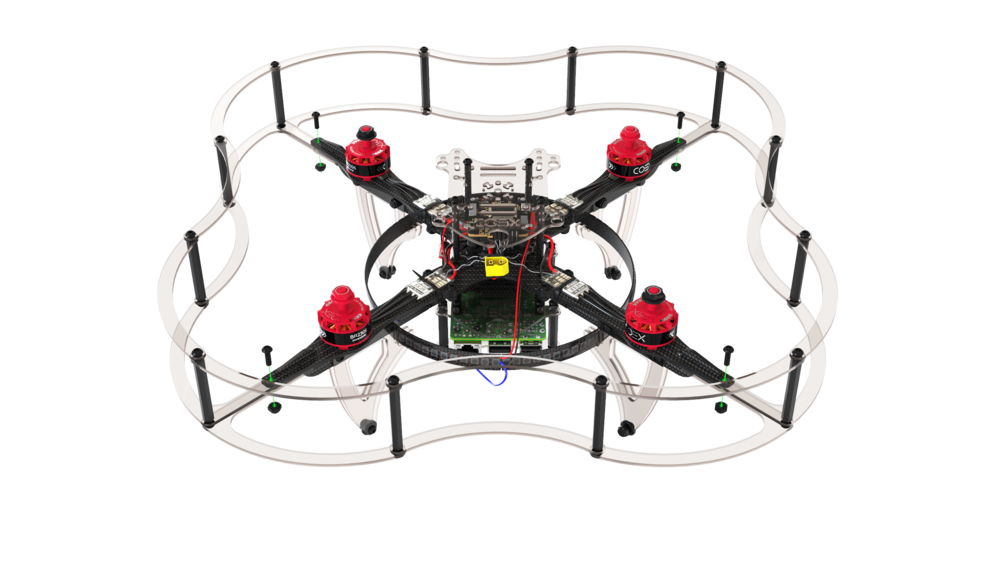
Подключите полетный контролер к Raspberry Pi с помощью USB к кабеля.
Установите ремешок для крепления АКБ.
Дрон собран, далее произведите настройку.
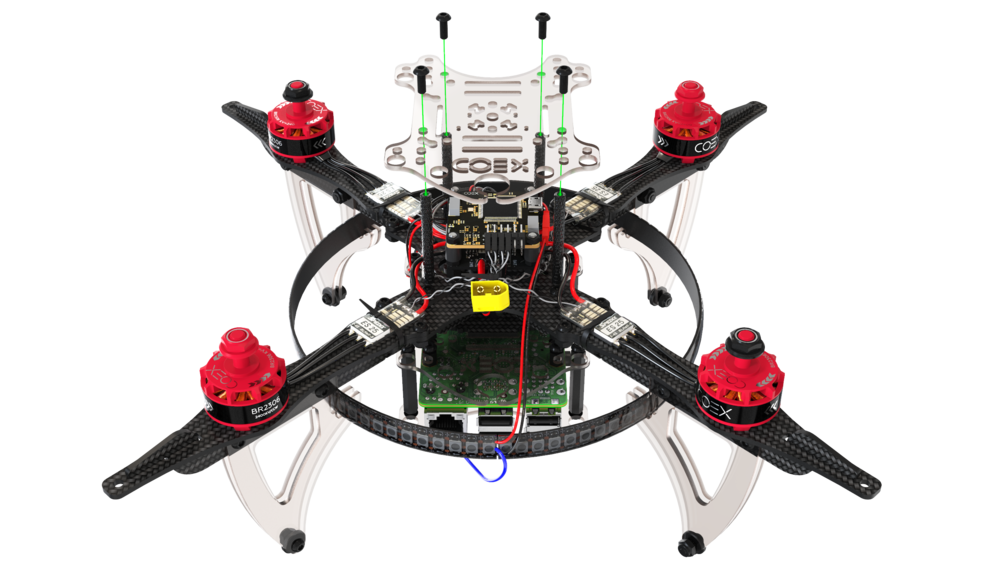
Установка моторов
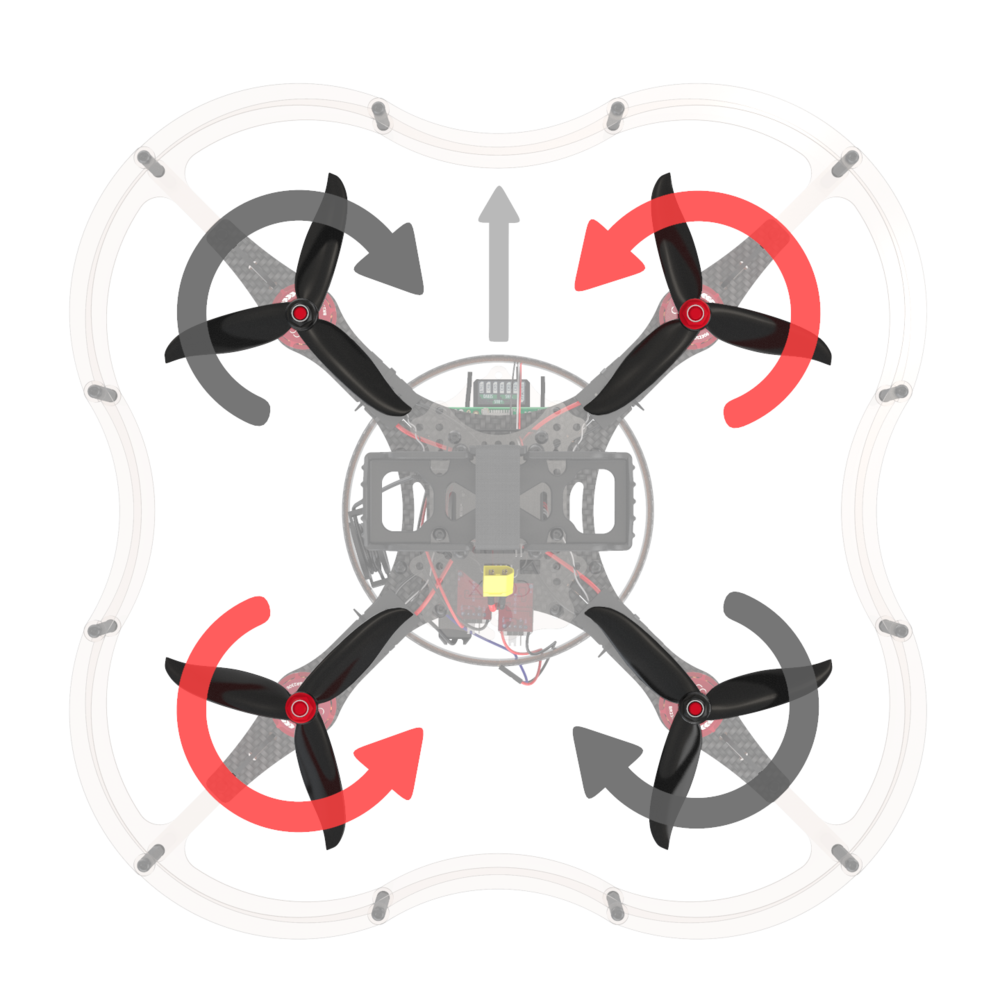
При установке моторов обратите внимание на схему вращения моторов. Маркировка вращения на моторах должна совпадать со схемой вращения.
Установите мотор на соответствующие отверстия в луче с помощью винтов М3х5.
Убедитесь, что моторы закреплены с помощью винтов М3х5, в противном случае может возникнуть короткое замыкание между обмотками.
Установка полетного контроллера
Набор “Клевер 4” позволяет установить различные полетные контроллеры, к примеру, COEX Pix и Pixracer.
При установке полетного контроллера обратите внимание на стрелку, расположенную на плате, при монтаже она должна быть направлена к носу коптера.





 купить по привлекательной цене 46990 руб. в Москве")