

- Почему может сгорать регулятор [править]
- Основные типы конструкций [править]
- Butterfly copter [править]
- Десяти-моторный тяжёлый аппарат «монстро» [3][править]
- Какую конструкцию выбрать? [править]
- Калибровка регуляторов [править]
- Квадрокоптер с двумя несущими крыльями [править]
- Квадрокоптер с дополнительным несущим винтом большого диаметра [править]
- Коаксиальные конструкции [править]
- Лётные условия-ликбез — wiki о коптерах
- Особенности применения в мультикоптерах [править]
- Плохая разработка [править]
- Проверенные контроллеры моторов [править]
- Радиосвязь-ликбез — wiki о коптерах
- Расчёт коптера-ликбез — wiki о коптерах
- Самые частые причины [править]
- Слишком высокие значения pid[править]
- Телевидение-ликбез — wiki о коптерах
Почему может сгорать регулятор [править]
Не так уж и редки случаи сгорания контроллеров моторов, особенно у коптеров, работающих в режимах, близких к максимальным возможностям силовых установок, например, у гоночных FPV-миникоптеров. Если вы установили причину сгорания регулятора, ещё не описанную ниже – смело добавляйте, чтобы ваши коллеги не наступали на те же грабли.
Основные типы конструкций [править]
В основном, определяются количеством моторов, обеспечивающих полёт мультикоптера
Butterfly copter [править]
Видео полёта и с камеры
Видео с борта
Десяти-моторный тяжёлый аппарат «монстро» [3][править]
Задумывался по потребности в машине, способной летать в условиях сильного ветра, переменчивых вниз и ввысь сходящих потоков.
Аппарат имеет ряд конструктивных особенностей ранее не применяемых на коптерах:
- Разнесенные центры масс (аккумуляторы буду крепится под боковыми узлами, на которых стоят регуляторы)
- Разнесение регуляторов группы с укорочением длинны шины и в то же время оставляя их под обдувом винтов.
- Трансформирование 10-ти роторного аппарата в 6-ти роторный или 4-х путём отстегивания (перестегивания) лучей. (Не классическое обрезание лишнего, а изменение конфигурации и геометрии при помощи универсальности крепежных узлов.)
Какую конструкцию выбрать? [править]
Исходя из цели аэрофотовидеосъемки, в настоящее время, на мой взгляд, имеются следующие градации камер, которые могли бы поднимать в воздух мультикоптеры:
Считаем, что соответственно весу этих камер потребуется еще и стабилизированный подвес для них, что означает добавку в весе еще не меньше 50-70% от веса этих камер.
Например, средние камеры вполне может поднимать в воздух гексакоптер, построенный на двигателях AXi 2814/20 (22), пропеллерах 13х6.5 и немецких контроллерах 2.0. Его преимущества – относительная компактность, удобство эксплуатации – он может летать вполне достаточное время (около 8-9 минут) на одной батарее 5800 мА/ч, которая удобно и быстро меняется с полезной нагрузкой 2 кг.
Стоит на этих же двигателях построить октокоптер (я строил такой), картина меняется: аппарат становится довольно громоздким, чтобы летать те же 8-9 минут с полезной нагрузкой допустим 2,5-3 кг., ему нужны две батареи (5800), которые нужно заряжать специальным зарядным устройством, эти батареи нужно носить с собой, они не очень удобно и быстро меняются и т.п.
Немецкий кит Okto XL вполне способен носить Canon 5D, но сама по себе его конструкция мне кажется слабоватой, следовательно, генерирующей колебания, да и с батареями там проблема – можно использовать только плоские, крепеж подвеса там хилый и т.п.
Октокоптер есть смысл строить только для тяжелых камер, но на более мощных двигателях (AXi 2826/12 или AXi 4120/20) и мощных контроллерах (например, Аэродрайв8 или Геркулес, которые для I2C довольно дороги – 700-1400 евро за 8 штук), смиряясь с неудобствами и потерей мобильности, понимая, что это плата за съемку с высоты на камеру высокого класса.
Источник
Калибровка регуляторов [править]
Калибровка контроллера мотора необходима для того, чтобы он «знал» диапазон значений управляющего сигнала, идущего от ручки газа (Throttle) пульта управления через
. Если моторы коптера стартуют неодновременно, либо слишком поздно, либо не выходят на режим максимальных оборотов – это признаки того, что нужно сделать калибровку всех регуляторов. Это можно сделать последовательно, отдельно для каждого регулятора, либо одновременно: подключив их к каналу газа
или используя функцию калибровки регуляторов у полётного контроллера.
Откалибровать контроллеры моторов можно используя полётный контроллер или подключив к аппаратуре управления (аппа) согласно инструкции. Обычно через аппу это делается так (лучше калибровать все сразу):
- подключается регулятор скорости к приёмнику в выходу сигнала газа (обычно 3-й), так же можно подключить все сразу, соединить вместе сигнальный провод (белый или жёлтый) и землю (чёрный или коричневый), и ОДИН провод питания
- включить передатчик и поставить ручку/стик газа в максимальное (вверх) положение
- включить питание регулятора (регуляторов) скорости
- дождаться первого писка (или не первого, смотрите инструкцию к вашему регулятору) и тут же перевести газ в минимальное (вниз) положение
- регулятор (регуляторы) откалиброван, это же повторить для остальных (если откалибровали не все сразу)
Квадрокоптер с двумя несущими крыльями [править]
Видео
Квадрокоптер с дополнительным несущим винтом большого диаметра [править]
Очевидная цель – увеличить вес полезной нагрузки.
Коаксиальные конструкции [править]
В коаксиальных конструкциях ВМГ расположены попарно друг под другом – соосно. Существует устоявшееся мнение, в том числе подтверждённое практикой, что две коаксиальные ВМГ (то есть расположенные так, что одна находится в воздушном потоке другой) менее эффективны, чем две ВМГ, разнесённые в пространстве (например, расположенные в одной плоскости, как в классических конструкциях мультикоптеров). Таким образом, единственным аргументом «за» при выборе коаксиальной конструкции считается компактность аппарата.
В коаксиальных конструкциях можно частично решить проблему срыва потока с пропеллера – сближением пропеллеров так, чтобы шаг между пропеллерами был меньше чем шаг “мёртвого” вихря. Частично – потому что сближение пропеллеров увеличивает их эффективность, но только в узком диапазоне скоростей вращения лопастей. [2]
Проверка эффективности пар разнокалиберных пропеллеров
Лётные условия-ликбез — wiki о коптерах
лётная погода—автор Книжников ВВ
Главная задача оператора дрона это полное понимание границ физических возможностей беспилотника при применении.
В авиации есть понятие лётной погоды—-это видимость не менее 1 км, сила ветра менее скорости сваливания на крыло, отсутствие осадков и тумана, высота волнения, а также допустимый температурный диапозон по классу защиты!
Есть ещё правила ситуационной обстановки в полёте, которые нужно избегать на маршруте—–например следующие условия.
1) при боковом ветре больше скорости сваливания вашего ла взлёт и посадка категорически запрещены —опрокидывание гарантированно.
2) при температуре воздуха ниже или выше класса климатической защиты дрона.
3) увидел на горизонте чёрную тучу —сразу лети в противоположную сторону или срочно садись —у тебя всего 5-10 минут на всё про всё—–фронтовой шквал грозы может превышает скорость ветра в 30 метров в секунду и легко опрокинет ла в штопор.
4) скорость ветра у земли в полтора раза меньше чем на высоте 50-100 метров и в два раза меньше чем на 300-500 м—надо учитывать при проложении маршрута.
5) при около нулевой температуре и высокой влажности легко схватить обморожение лобика крыла и лопастей винта —полёты не рекомендуются. При осадках и тумане тоже самое—так как это и есть 100% влажность.
6) если нижний край сплошной облачности не превышает ста метров полёты не производить.
7) не влетать под кучевое облако типа башни—-термик может иметь скороподъёмность до 20-30 м в с и засосет в облако с обморожением и на огромную высоту.
8) не подлетать к горе с подветренной сторону—-мощный нисходящий ротор придавит к земле или опрокинет ла.
9) отвесный берег, кромка леса и поляны,черная пашня , холм или скала или высокое строение являеться стимулятором зарождения термика—-даже зимой асфальтовая дорога или железнодорожное полотно или жилые дома рождают тепловые пузыри и поможет долететь до цели с минимальной мощностью.
10) всегда избегать эксплуатацию дрона в грозу—-вероятность получить в наземную станцию управления молнию и смертельная опасность для оператора.
Для водоплавающих дронов есть ограничение по скорости течения реки не более 1-2 метра в сек и высоте волнения от ветра и прибрежной волны не более полметра,чтоб он смог выгрести к берегу.
Для сухопутных важно проходимость по рыхлой или сыпучей поверхности типа снега или песка, растительности высотой не более пол метра, препятствие не превышающее радиус колеса и углы подьёма не более 45 град!
МАГНИТНАЯ БУРЯ
Выброс огромной массы солнечной плазмы сопровождаеться потоками высокозаряженной энергией частиц—-сначало обычно через несколько часов на землю прилетают самые легкие и быстрые— это электроны , на следующий день более тяжелые протоны, через пару дней положительно заряженные ионы гелия деформируя и пробивая магнитное поле земли!
Они могут вызывать нарушения физикохимических связей в молекулах с ферромагнитиками типа кровеносные красные тельца отвечающие за перенос кислорода в крови к жизненноважным органам человека —-кровь густеет и поднимаеться внутричерепное или глазное давление—-сопровождается головными болями или растройством зрения—-страдают много инсультников и сердечников, в эти дни им ни в коем случае не садиться за руль любого транспортного средства—-за штурвал ла тем более!!!
Также замечено ,что в эти дни плохо клеят клея из за пропажи адгезии и краски сползают чулком или шагрень при высыхании или вставании у полиэфирок и эпокси—–ничего не клеить, не красить,неформовать—-всё равно брак получиться !
Ещё нарушается работа электромагнитных сверхчувствительных компонентов типа магнитных компасов, жпс приёмников, падает дальность устойчивой радиосвязи!

Особенности применения в мультикоптерах [править]
Обычные ESC’и, используемые в моделях вертолетов и самолетов для мультикоптеров подходят с большой натяжкой.
Дело в том, что для эффективной балансировки коптера в воздухе важна скорость и точность отработки мотором управляющего сигнала. В обычных ESC’ах для снижения помех используется низкочастотный фильтр на управляющий сигнал.
Также, в подавляющем большинстве случаев обычные контроллеры способны воспринимать управляющий сигнал частотой 50 Герц. Гораздо лучше себя ведут ESC’и, способные работать с сигналом ~400—450 Гц и не имеющие такого фильтра (например, Next Level 40A).
Подробнее см. тут: PWM-контроллеры моторов: Увеличение скорости реакции
Плохая разработка [править]
Плохо спроектированный регулятор, плохо изготовленный или регулятор со слишком завышенным заявленным допустимым током — вероятнее всего сгорит. К примеру, миниатюрный размер таких регуляторов, как DYS SN20A и KISS 18A и, как следствие, небольшая площадь рассеивания (к тому же без радиаторов) – готовые условия для перегрева и сгорания. Не следует превышать ограничения по току при использовании таких регуляторов.
Другие конкретные случаи:
Причиной перегорания регуляторов может быть неправильное применение таких параметров настроек, как Damped Light, Motor Timing или Demag.
Если тайминги стоят слишком высокие, несоответствующие мотору, то происходит потребление слишком большого тока, моторы сильнее греются и менее эффективно работают. Для большинства моторов подойдет значение по умолчанию: “meduim”. Но, например, для моторов Cobra 2204 2300KV отлично работает значение “medium-high”.
Включенная функция Damped Light даёт дополнительную нагрузку на моторы и регуляторы, т.к. требуется больше энергии для активного торможения ВМГ при сбросе газа.
Проверенные контроллеры моторов [править]
 DJI 30A OPTO
DJI 30A OPTO DJI 30A OPTO
DJI 30A OPTORCTimer ESC 20A
 Turnigy TY-P1 25A
Turnigy TY-P1 25A Turnigy TY-P1 25A
Turnigy TY-P1 25AHobbyKing Red Brick 25A
Радиосвязь-ликбез — wiki о коптерах
Радиоуправление—автор Книжников ВВ
Радиоэфир или абсолютный космический вакуум —это разновидность материи то есть универсальная среда или поле проводящая электромагнитные волны(расширяющийся теплород) и гравитация(схлопывающее давление)—- это разнонаправленные энергии в чистом виде,но при этом сам эфир полностью нейтрален типа —не имеет массы,электрозаряда,магнитного поля(спин эффект) кроме одного свойства и размерности —-скорости распространения события 300 000 000 м/с!!!
Благодаря изобретению радио русским ученым Поповым на теории волн немецкого физика Герца появилась радиосвязь!
Это основное дистанционное управление для большинства беспилотников на большие расстояния в десятки километров при направленных антеннах и прямой видимости между дроном и оператором!
Ру делиться на аналоговый одноканальный радиосигнал типа АМ, ЧМ, ШИМ и цифровой импульсный сигнал с двоичным кодом, прыгающий по каналам и своим протоколом связи типа дуплекс ---широкополосная!
Аналоговое ру применяется в гражданском исполнении типа моделей и игрушек при гарантированной дальности связи до пары километров и занимает всегда конкретный канал разрешенного радиодиапозона 27-28Мгц, 35-40Мгц и 144Мгц при непрерывном одностороннем излучении передатчиком радиоволны мощностью 50-500 мвт!
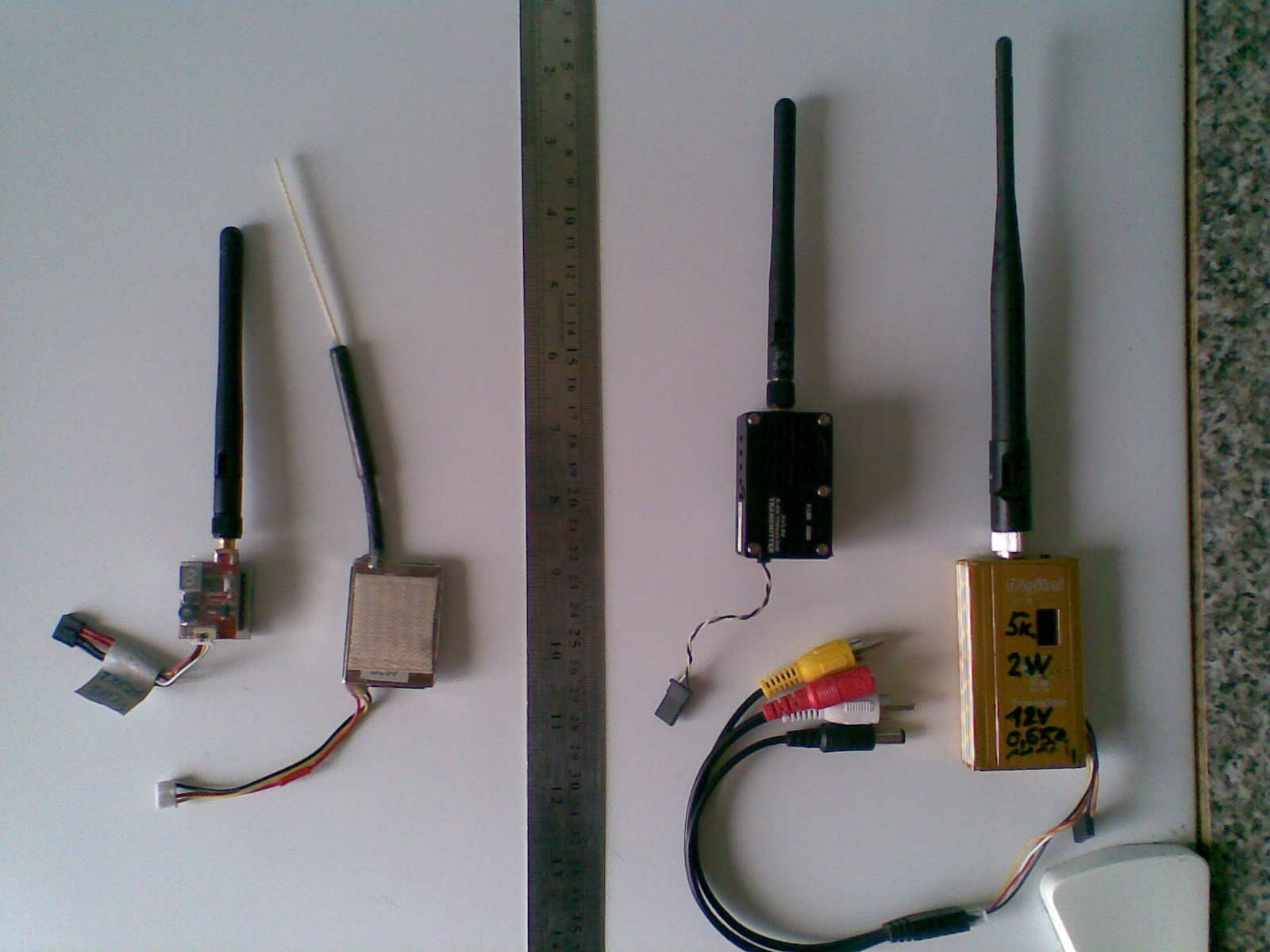
Цифровое ру применяется для профессиональных задач, где требуется повышенная помехо-защищённость двухстороннего канала связи с возможностью приёма телеметрической информации с борта дрона помимо самого удаленного ручного управления! Принцип обмена данными между передатчиком и приёмником по принципу вай-фай связи между радио-модемами с мощность излучения 10-1000мвт! Мощность излучения можно замерить лампотестером с усиками в 1/4 лямбда=0.25 длина волны!
Разрешённый диапазон 433Мгц, 900Мгц и 2.4Ггц, 5.8Ггц—-чем выше частота прыгающих каналов, тем шире пропускная способность радиоканала от сотен килобит в секунду до нескольких мегабит! Существует несколько стандартов протокола связи в гражданском использовании, каждый со своей математикой и поэтому они не видят друг друга даже в одном радио диапозоне.
Микроприёмники массой менее 10г обычно односторонней связи—-телеметрические ру приёмники типа дуплекс более громозкие, но и более чувствительные, надежные и помехозащищённые!
Видеопередающее оборудование работает по тем же принципам, что и радиоуправления!
радиоприёмник
Главная хар-ка приёмника это чувствительность----у цифровых радиоуправляемых доходит до 115дб, у телевизионных аналоговых до 95дб!!!
Чувствительность приёмника сильно портится загрязнением эфира в радиодиапазоне приёма—–например ру на 2.4Ггц и мобильный вай-фай друг друга глушат и дальность связи резко падает в городских условиях в 2-4 раза по сравнению с сельской и не заселённой местностью типа тайга, пустыня или тундра—–поэтому надо искать чистый диапазон в эфире!
Если уровень помех в том же диапазоне -100дб,то реальная чувствительность приёмника будет тоже 100дб вместо заявленных 112дб замерянных в лабораторных условиях глухой радио эхо камеры!потеря в 12дб чувствительности эквивалентно уменьшению дальности приёма в 4 раза!!!
Например в городе дальность видеосвязи на 5.8Г при мощности излучения 25 мвт не превышает 200м в прямой видимости, а за городом уже 400м, в малонаселенной глуши или на вершине холма уже 800м—-при 1.2Г дальность пропорционально вырастит в 2-3 раза !
Чувствительность приёмника проверяется без антенны на малой мощности передатчика—-при 0.1 мвт излучения должна быть дальность приёма не менее 10-15 метров! Саму приёмную антенну подбирают к конкретному приёмнику тем же методом—-дальность должна быть не менее 30-50м!
Простые приёмники бывают с одной приёмной антенной, вч блоком и дешифратором и сложные типа диверсити с двумя и более принимающими каскадами—-несколько антенн и вч блоков и одним дешифратором на базе микрочипа, который определяет самый чистый и мощный радиосигнал приходящий на разное расположение диаграмм ! Сейчас по мимо низкочастотного восьмиканального шима для управления электроприводов с приёмника стали применять цифровые стандарты типа сбас для увеличения каналов связи до двадцати—– возможность сразу управлять большим кол-вом функций и исполнительных механизмов одновременно!
Но на практике сразу использовать более 5- 6 команд в ручном управлении одним оператором не получается—–поэтому большими беспилотниками управляют два-три человека, это пилот отвечающий только за вождение дрона, наводчик систем видеонаблюдения и оружия, машинист манипулятора и других функций! А бортовая автоматика помогает разгрузить одновременную многозадачность операторам дронов!
Исторически напряжение питания сложилось на номинал в 5 вольт при возможном диапазоне 4-6в для питания рулевых машинок напрямую с шины приёмников! Но теперь есть линейки приёмников ру с диапазоном питания 3-35в!
Внимание----обычно приёмники идут в пластмассовом корпусе и попытка их заэкранировать металлическим заземленным корпусом вызывают расстройства вч контуров на плате!
радиомаяк
В случае аварии дрона на маршруте и его не возврате на базу всегда активируется аварийный автономный радиомаяк, работающий в импульсном режиме до одной недели —–есть два вида
1) жпс-трекер посылающий смс сообщение по сотовой связи на мобильный телефон с текущими координатами маяка!
2) радиожучок с встроенным жпс приёмником работающий обычно в диапазоне 433Мгц на любительские цифровые радиостанции с синтезатором речи, проговаривающим текущие координаты!
Принцип локации, как у охоты на лис—если при аварии видеолинк не отключился на борту, то можно также засечь азимут потеряшки по силе сигнала на направленную антенну видеоприёмника и идти на цель постепенно уменьшая чувствительность ручной настройкой канала!
причины применения ретранслятора
В условиях плохого приема радиосигналов с борта дрона применяется высотный ретранслятор на базе аэростата или коптера—- причин слабого сигнала множество
1) слишком большое удаление дрона от базы!
2) выход дрона из зоны Френеля, где диаграмма приёма у экрана земли выглядит как яйцо в космос, вместо булика на высоте!
3) вход дрона в зоны радио аномалий типа залежи подземных руд, железнодорожные линии электропоездов, линии электропередачи высокого напряжения, большие отдельно стоящие металлоконструкции в виде ангаров, мостов, небоскребов, башен, труб, кораблей, вышек сотовой и радиорелейной связи!
4) большая напряженность радиопомех в зоне мегаполисов от мобильной связи и вай фай интернета!
5) работа дрона на малой высоте или на поверхности земли или воды, а также в лесистой местности!
6) выход дрона из зоны прямой видимости сну по причине радиотени от строений, холмов и деревьев!
7) наличие на маршруте зон с открытой дуговой электросваркой и искрообразования от контактно-проводного электротранспорта типа троллебус, трамвай, электричка, как источников широко-импульсной радиопомехи!
8) интерференция радиоволн в зоне приема на земле от всех отражающих поверхностей с электропроводящими свойствами типа зелёной кроны деревьев,металлопластиковые заборы, рекламные щиты и окна,висящие провода, железобетонные фасады строений—-
это всё так называемое радиоболото, где сильно вязнет радиосигнал в 10раз!
смысл поднятия ретранслятора на высоту 100-300 метров это попасть в зону прямой видимости с дроном—чем выше , тем устойчивее радиосвязь!
это полный эквивалент вышек сотовой связи,городских телебашен или вершина голой горы или холма!
связки диапазов радиоканалов
Если видиолинк между дроном и ретранслятором в диапазоне 1.2 ггц, то передача на сну всегда в другом диапазоне например 2.4 или 5.8 ггц —– главное чтоб гармоники сигналов с ретранслятора на сну и на дрон не попадали на частоты каналов приёма!
При ручном управлении дроном со сну вне режима автопилотирования по программе диапазон ру или радиомодема также должен быть разным — например с земли идёт связь по 35-40 мгц на ретранслятор, а на дрон уже 433 или 900мгц!
Для увеличения пробивной дальности видеолинка и радиоуправления на ретрансляторе используются направленные антенны типа яги ортогонально расположенных друг к другу с минимальной боковой парусностью! При цифровом линке на борту дрона достаточно одной антенны для передачи видео, телеметрии и команд управления по принципу вай-фая на ретранслятор, а затем на компьютер сну!
Разновидностью ретранслятора является летающий видео-сканер на базе маленького квадрокоптера для контроля других бпла в ближнем пространстве —-достаточно подняться выше окружающих домов в городе или деревьев в лесу на высоту 100-150 метров и просканировать весь диапазон видеолинка!
Дальность радиосвязи
Напряжённость электромагнитного поля волны обратно расстоянию, а вот мощность излучения падает в квадрате от расстояния!!!!
Где степень напряжённости 20lg(U/Uо)=20дб эквивалентно 10 кратному усилению----
0дб=усиление в 1, 1дб=1.1, 2дб=1.25, 3дб=1.4, 4дб=1.6, 5дб=1.8, 6дб=2, 10дб=3.2, 18дб=8, экв32дб=20дб 12дб=10х4=40
Степень мощности излучения принято как 10lg(Р/Ро)=10дбм эквивалентно 10мвт ----
1мвт=0дбм, 10мвт=10дбм, 100мвт=20дбм, 1вт=30дбм, 10вт=40дбм
Так называемый бюджет линии обеспечивает предельную дальность устойчивой связи между передатчиком и приёмником, как сумма логарифмов в децибелах мощности излучения , коэф.усиления антенны передатчика №1, коэф.чувствительности приёмника и коэф.усиления антенны №2 для чистого космического вакуума,он же эфир!
Кбюд = излучение Tx(Ку.мощ Ку.ант1) чувствительность Rx(Ку.чув Ку.ант2) = Ку.м Ку.1 Ку.пр Ку.2
Возможность реальной дальности это разница бюджета линии связи и коэф. поглощения энергии волны атмосферой (молекулами газов воздуха)!
Поглощение сигнала сильно зависит от погодных условий типа тумана, осадков и магнитных бурь, а также наличие листвы на деревьях и интерференции прямого и отраженного сигнала от экранирующих поверхностей типа земля, вода, строения, горы!
Тогда при реальном поглощении атмосферой Земли в прямой видимости с учётом запаса на сигнал-шум 6дб—-
Кпог=-50дб для 1.2Г—
Кпог=-55дб для 2.4Г—-
Кпог=-60дб для 5.8Г!!!
Расстояние связи в км l=1км х эквивалент (Кдал)---- Кдальности(дб)=(Кбюд Кпог-60дб),
где -60дб или 1 000 кратного ослабления-затухания эквивалентно 1км дальности !
При ру 2.4Г мощностью 100мвт или Ку.м=20дбм и стандартной чувствительностью Ку.пр=105дб на диполях по 2дб получаем
бюджет линии Кбюд=20дбм 2дб 105дб 2дб=129дб и около Кдал=129дб-55дб-60дб=14дб, тогда предел дальность l=1км х (экв14дб)=1км х экв(6дб 6дб 2дб)=1км х (2х2х1.25)=5 км! на голой горке за городом!!!
Например с видео-передатчиком 1.2Г мощностью 1 вт или Кум =30дбм и диполе Ку.1=2дб при чувствительности стандартного видеоприёмника Купр= 90дб и направленной антенны типа пятиэлементной уда-яги Ку.2=10дб получаем Кбюд=132дб ——–
тогда Кдал=132дб-50дб-60дб=22дб или l=1км х экв(22дб)=12.5км! —рекомендуемая высота перепада это 1/10 расстоянию—
предел устойчивой видеокартинки на подстилающей поверхности на высоте 1.2км!
Для сравнения в открытом космосе,где нет паразитного поглощения среды, дальность того же комплекта была бы в 320 раз больше или 4000км!!! Например
на высоте 40 тысяч км висят спутники-ретрансляторы геостанционарной орбиты для трансляции спутникого телевидения на планету Земля.При запасе двух-трёх мощностей для пробивания сигналом 100 км атмосферы направленное радиоизлучение покрывает до четверти поверхности планеты—- приёмная тарелка телевизора с острой диаграммой направлена строго на спутник в зоне прямой видимости! Чем острее луч диаграммы, тем выше коэф. усиления антенны!!!
Постоянная Больцмана при температуре приёмника 293К= 20С —–тепловой шум радиоэфира (ик-волны)фон= -120дб!!!
поэтому входные каскады приёмников дальней космической связи сильно охлаждают чтобы повысить чувствительность!
Где все? космос с точки зрения радиоастрономии
От Солнца до ближайшей звезды 4.2 световых года или 4х(10)13 км!!! если рассчитать бюджет двухсторонней радио линии между нами и мнимыми туземцами , то это не менее 330 дб—- чудовищно мощная и крупногабаритная радио-аппаратура, например наземные станции космической связи только в пределах нашей солнечной системы радиусом всего 4 х(10)10 км это целое здание плюс очень узко направленная антенна типа тарелки диаметром пару-тройку десятков метров !!! А теперь представим , что ближайшая разумная цивилизация нашего уровня находится в 1000 световых годах!!!одним словом чтобы послать им радио сигнал нужной мощности сравнимой с излучением карликовой звезды у нас просто нет такого оборудования !
Самые распространенные связки антенн для дальней связи на десятки километров с беспилотником ——
1) при вертикальной поляризации коасильный диполь или V-антенна 2-2.5 дб с диаграммой бубликом или коллинеар 4-5дб блином с стороны дрона и направленные антенны типа патч 8-10дб или волновой пяти-элементный канал 10-11 дб(она же Уда-Яги) со стороны СНУ!
2) при круговой поляризации левого и правого вращения хороши клевер 1.5дб с пышкой и семи-восьми витковый хеликс 10-12дб!
3) также применяются антенны би-квадрат 10дб, вивальди 8дб на приём и грибок-пагода 5дб на передачу!
4) в особых случаях сверхдальней связи на сотни километров применяют станции с направленными антенн-трекерами на борту дрона и на сну постоянно нацеленных друг в друга в автоматическом режиме слежения!
подробнее смотри статью “типы антенн”
ограничение
Чтобы ресурс радиопередатчика был большим, требуется хорошее охлаждение электронной платы вч блока радиатором, согласованная антенна и дефорсирование по удельной мощности излучения—-удельная мощность потребления не должна превышать 0.1 вт/г!
например—–честная потребляемая мощность передатчика при КПД изл= 25% при массе 30г не более 30х0.1=3вт внутри корпуса бпла!
это всего четверть на выходе и 750 мвт излучения при токе потребления 3вт/12в=0.25а!
смотри статью “радиопомехи”

Расчёт коптера-ликбез — wiki о коптерах
методика расчёта предложена Книжниковым ВВ
полётная масса
Эмпирика прикидки максимальной массы мультироторных коптеров от габаритов платформы или длины диагонали между моторами при условии максимально вписанных винтов—– масса в кг равна десять умножить на диагональ в метрах в квадрате—–м=10d2—-
например при диагонали 32 см или 0.32 метра получаем 10 х (0.32)х0.32=10х0.1=1 кг типично для 8 дюймовых вмг. При диагонали в 1 метр получим 10 кг приемлимой максимальной полетной массы!
можно решить и обратную задачу——заказчик просит спроектировать мультиротарную платформу на 10 кг полезной нагрузки——значит масса полётная будет 4х10 кг =40кг , тогда сразу прикидываем что размер диагонали равен корень квадратный из 40/10 или корень из 4 и получаем 2 метров!
Академический метод расчета мощности электро вмг по тяге в режиме висения в полгаза —-
1) желаемая тяга в ньютонах делить на ометаемую площадь винта в метрах квадратных—нагрузка в паскалях!
например хочу получить 500 г силы = 5 н тяги на стопе с винта диаметром 10 дюйм или 5 дм2 =0.05 м2—–получаем нагрузку 5н/ 0.05м2=100 н/м2!
2) корень квадратный из соотношения нагрузки к плотности среды—это скорость потока метры в секунду в плоскости винта!
корень квадратный из соотношения 100 н/м2 /1.23 кг/м3=( 81)0.5=9 м/с!!!
3) потребляемая электро мощность на среднем газу в ваттах с учётом кпд вмг —-это произведение тяги на скорость делённое на кпд электро-вмг!
потребляемая моща равна 5 н х 9 м/с / 0.66=67.5 ватт—–это эквивалентно мотору массой 65-70 грамм в полгаза!
4) для режима статики удобно применять эмпирическое выражение зависимости геометрии двухлопастного винта и размеров статора многополюсного бк электромотора как произведение диаметра на шаг пропеллера в см эквивалентна произведению диаметра на длину статора в мм D(см)хH(см)=d(мм)хl(мм)—- например 25,2см х12,6см=318=22мм х14.4мм
эффективность по тяге при висении
эмпирическая зависимость для модельных размеров пропеллеров мультироторов в полгаза, диаметр винта в дюймах приблизительно равен оптимальной удельной тяге электро-вмг например
3дюйм=3 грамм на ватт----4д=4г/вт----5д=5г/ вт----6д=6 г/вт и так далее вплоть до 15дюйм!
Обычно наибольшую эффективность по удельной тяге показывают двухлопастные пропеллеры—-но при ограничении габарита по диаметру из-за конструктива используют трёх и четырех лопастные для повышения тяговооруженности при том же моторе и акку!
Также многолопастные винты лучше работают в турболизированом потоке от ветра в приземленном слое—по причине
меньшей паразитной пульсации давления при проходе лопастями секторов ометания в косом потоке и пересечении луча!
Как результат —–меньше трясёт весь аппарат, корректней работает АП и видеокартинка не дерганая!
косой поток
Коптер при движении в горизонте относительно воздуха летит благодаря наклону оси винта от вертикали в направлении полёта —этот режим вызывает косой обдув на плоскость вращения винта——явление очень сложное с точки зрения мгновенного аэродинамического обтекания каждого фрагмента лопасти в зависимости от сектора расположения лопасти!
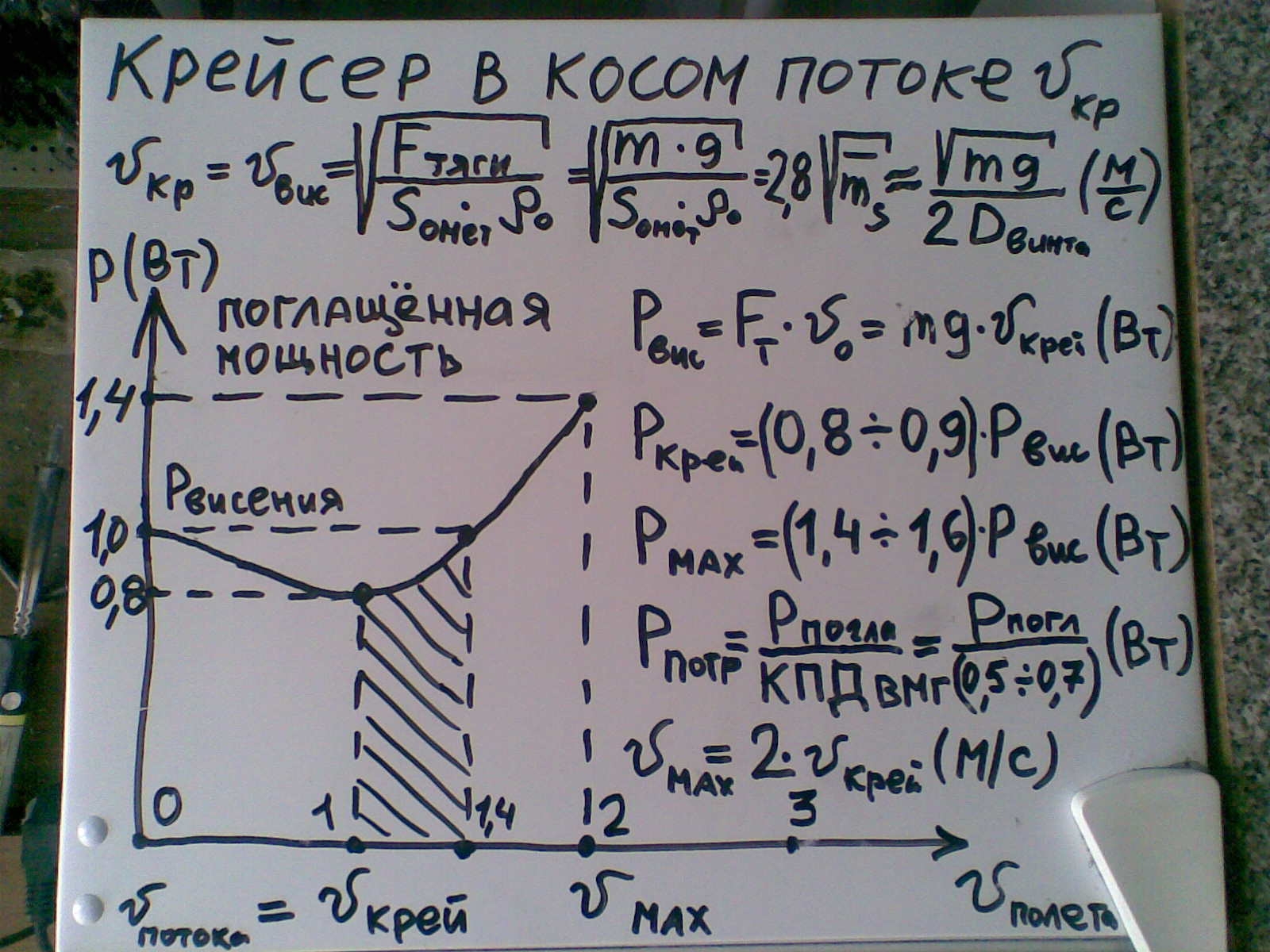
В классическом одновинтовом вертолёте для адаптации к косому обдуву придумали автомат перекоса угла установки лопастей в зависимости от сектора—-при этом лопасть начинает работать как крыло и частично разгружает мотор по потребляемой мощности в полтора раза правда только в узком диапазоне горизонтальной скорости —-называется крейсер ! В мультироторах винту с фиксированным шагом удаётся адаптироваться благодаря упругому динамическому кручению лопасти из эластичного материала типа термопластика плюс-минус пару градусов—-разгрузка мотора на крейсере около 1.1-1.2 раза относительно режима висения!
минимальная скорость крейсера тождественна скорости потока через винт в режиме висения для квадрокоптера
Vвис=Vкр=(1.1mg )0.5/2D, диапозон крейсерских скоростей коптера любого типа Vкр=(1-1.4)Vвис!!!
Например квадрик полётной массой 800грамм с винтами диаметром 10 дюйм или 0.25 м-----то корень квадратный из 1.1веса в 8.8 ньютон делить на 2х0.25 м ----получаем 2.96/0.5=6 метров в секунду! Тогда поглащённая мощность висения или потока в штиль равна вес 8 н х 6 мвс=48 вт-----потребляемая моща 48 вт делить на кпд вмг 66% или 0.66 равна 72 вт ! В горизонтальном полёте на крейсере около 6 м/с мощность упадет до 0.9 мощности висения или 65 вт, так как
винт в косом потоке начинает работать как крыло в набегающем потоке! А вот при максимальной скорости полёта в два раза выше, чем скорость потока при весении потребляемая мощность вмг вырастет также в 2 раза!
Угол наклона коптера при висении в ветер, то есть неподвижно земле, как раз указывает истинную скорость ветра!
Тогда скорость можно принять как половину от угла наклона или например 0.5 х10 град=5 метров в секунду для большинства мультиротарных коптеров! На практике если наклон при висении более 20 град например на высоте 100 метров и выше, то ветер уже критичный для невозврата против ветра——выход жаться к земле, где ветер слабее 1.5 раза и огородами ползти домой!
Максимальная воздушная горизонтальная скорость коптера эмпирически это произведение шага на частоту—– Vпол=Hf !
Парадокс работы винта в косом потоке для мультироторных платформ заключается в следующем —–максимальная воздушная скорость ла определяется скоростью потока, как произведение геометрического шага винта на частоту вращения и равна именно скорости потока в плоскости винта несмотря на то что ось или вектор тяги не параллелен движению самого коптера по сравнению с самолетом,а развернут под большим углом к горизонтали и почти вертикальный 60-80градусов—-получается что
струя воздуха относительно коптера выворачивается из прямой классической воронки при висении в змееобразную загогулину похожую на раструб саксафона засасывающего набегающий поток с трансформацией скоростей в горизонтальную составляющую!
“10 заповедей” авиаконструктора квадрокоптера(дрон)
1) масса полётная это четыре массы полезного груза mпол=4mгруз, где mрамы авионика =mвмг=mакку=mгруз
2) диагональ между моторами в сантиметрах это корень квадратный из полётной массы дрона в граммах L=(m)0.5
3) удельная тяга винта (грамм/ватт) в режиме висения на полгаза равна диаметру пропеллера в дюймах D(дюйм)=m/Рпот
4) скорость крейсера в горизонтальном полёте равна скорости потока через винт при весении Vкр=Vвис(м/с)=5(m(г))0.5/D(см)
5) мощность потребления вмг при весении равна произведению массы на скорость потока и делить на эффективность вмг с бк моторами Pст=UаккуIст=0.01m(г)Vвис/КПДвмг———где КПДвмг =40% у крошечных квадриков диагональю до 12см,КПДвмг =50% у мелких квадриков диагональю до 25см, КПД=60% у средних коптеров с диагональю до 50см, КПД=70% у больших до 100см, КПД=80% у крупных квадрокоптеров с диагональю свыше 2м
6) напряжение аккумулятора эмпирически корень квадратный из одной десятой полётной массы в граммах Uакку(в)=(0.1m)0.5
7) перегрузка на ла или относительный запас тяги это максимальная тяговооруженность —- Fст(г)/m(г)=Kт=2-4единицы
8) относительный запас скорости полёта это корень степени 0.66 из тяговооруженности Kск=(Тст)2/3——тогда Vмах=VвисKск
9) коэф.полезного действия электро-вмг в горизонтальном полёте на полном газу 50% —–Pпотреб=0.02m(г)Vмах=UаккуIпол
10) произведение диаметра и шага двухлопастного винта в см равно произведению диаметра и длины статора бк в мм DH(см2)=dl(мм2)
более подробно смотри статью “долголёт”

Самые частые причины [править]
- BEC – встроенные в контроллер мотора стабилизаторы напряжения, которые предназначены для питания приёмника или полётного контроллера. Допускается подключение только одного BEC. Если будут подключены 2 или более контроллера мотора к одному приёмнику или полётному контроллеру, то, из-за того, что, как правило, контакты питания всех разъёмов запараллелены, произойдёт замыкание плюсовых контактов всех импульсных BEC, в цепь пойдёт очень много шума, сбивая нормальную работу этих же контроллеров моторов. Поэтому настоятельно рекомендуется извлекать плюсовой (красный) провод питания, идущий от контроллера мотора, оставив лишь сигнальный и общий провод (земля). Дело проще, если в регуляторах нет встроенных BEC (т.н. OPTO-регуляторы]), но это обязательно нужно проверить, т.к. продавец может умолчать об этом, не придав значения, либо к вам может из-за ошибки попасть модификация одной и той же модели регулятора со встроенным BEC.
- BLHeli. Есть мнение, что регуляторы с прошивкой BLHeli сгорают заметно чаще, чем с прошивкой SimonK. Интересно было бы ознакомиться с исследованиями на эту тему.
- Плохое охлаждение регуляторов. Очевидная причина. При достаточно сильном охлаждении регулятор вполне может работать даже за пределами заявленных характеристик. Поэтому предпочтительно размещать регуляторы на лучах: это самый простой и эффективный способ избежать перегрева.
Слишком высокие значения pid[править]
Когда значение параметра P в PID-регуляторе велико, полётный контроллер будет стремиться изменить скорость вращения моторов очень быстро, чтобы более резко стабилизировать коптер. В этом случае моторы потребляют повышенный электрический ток, в том числе и в пиках. Это вполне может вызывать сгорание регулятора.
Это можно увидеть на снимках графиков, получаемых с помощью BlackBox. К примеру, вот данные двух полётов, слева – значение P = 2.0, а справа = 7.0 (как для крена так и для тангажа), все остальные параметры ПИД одинаковые.
Самыми показательными являются данные о мощности моторов (нижние линии). Хорошо видна скорость изменения вращения моторов: при высоком значении P она более высокая и, даже когда коптер не выполняет резких маневров, видны ощутимые колебания.
Резкий поворот вокруг своей оси:
Ролл (видно два быстрых изменения скорости моторов: само вращение и перескок (или отскок), который очень большой при высоком значении P):
Флип (отскок выглядит очень критическим для моторов):
Телевидение-ликбез — wiki о коптерах
телевидение—автор Книжников ВВ
КАМЕРА
Благодаря открытию немецкого ученого Эйнштейна электрической природы фотоэффекта—–свет это электромагнитная волна!
Принцип телевидения на электрической основе придумал русский ученый в 30-е годы прошлого века в СССР!более подробно смотри статью “оптика”
Видео-камера преобразует световой луч сфокусированный объективом на полупроводниковую матрицу в электрический сигнал с низкой частотой телевизионного аналогово сигнала 6Мгц или 25-30 кадров в секунду при построчной считки около 400-650 линий в стандарте ПАЛ!
Точность распознования объекта у аналогово телевидения при угле обзора оптического объектива в 90-100 град всего 1 метр длины на 100 метров расстояния до цели или коэффициент читаемости Kч=100/1
например
1) человек читается как вертикальная палочка при 100-150 метрах от камеры,
2) окна и двери как прямоугольники при 150-200 метров,
3) птицы и животные как шарики до 50 метров,
4) лицо и номерной знак распознаётся всего при 4-6 метрах,
5) автомобили, деревья и кусты читаются до 400-600 метров,
6) поезда, корабли и мосты как вытянутая лента до 2-3 км,
7) самолёты, вертолёты, катера и яхты как треугольники 0.5-1 км,
8) коттеджи и дачи как кубики и прямоугольники
до 2 км,
9) небоскрёбы, трубы, башни и вышки как вертикальная палочка при 5-10 км!
При цифровой картинке идёт считывание изображения, как мгновенного фото с частотой 30-60 кадров в секунду при разрешающей способности матрицы от 400 по горизонтали и 300 пикселей по вертикали в стандартном формате картинки 4/3 и HD1080х720 пикселей при формате 3/2—–эти показатели характерны для курсовых камер с минимальной задержкой 25-50 мс в режиме видео-онлайн на принципе ССД матрицы, когда вращающийся винт в кадре замирает —-но цветовая гамма имеет специфичные оттенки на любителя! Размер видеоматрицы курсовой микрокамеры обычно 1/3 дюйма по диагонали или около 8мм— иногда 1/2.5 д,что лучше!
Для высоко-качественной съёмки используется формат 4К матрицы в экшен-камерах, где разрешающая способность в 4 раза выше FHD картинки, но требуется процессор огромной мощности и большая задержка—–эквивалентно фото 4000х3000=12Мб с частотой не менее 30 кадров в секунду или производительность чипа от 1000МГц/с! Обычно используют принцип СМОС матрицы, когда винт распадается на полосы—-но цветовая гамма более естественная и приятная для глаз! Задержка по времени может доходить до 300 мс! Размер видеоматрицы экшен камеры обычно 1/2 дюйма по диагонали или около 13мм— иногда 1/1.7 д,что лучше!
Коэффициент читаемости у цифры возрастает у FHD Kч=200/1—-для 4K уже Kч=500/1 по сравнению с аналогом при том же угле обзора, то есть дальность распознования предметов увеличивается в 2-5 раза!
при 8К Кч=700/1 четкость изображения сравнима человеческому глазу
Экспозиция по яркости определяется скоростью электронного затвора аналогично механическому фотозатвору на лепестках обычно от 1/10 в сумерках и до 1/100 000 секунды при ярком солнце!
Сейчас вовсю применяют режим динамического компрессора для видеокартинки с камеры WDR —-где яркие объекты затеняются, а темные высветляются при резких тенях от солнца, тогда читаемость по яркости многократно возрастает!
Принцип работы компрессора следующий—-на каждый выходной кадр с частотой 30 штук/сек делается два кадра с разной экспозицией короткая на яркое освещение и длинная на тени,затем картинки интегрируются(смешиваются)и выдаётся конечный кадр с подтянутыми яркостями в светлых и темных участках !!!
Специализированные матрицы чувствительные на приём света в инфракрасном диапазоне используются для ночного видения!
При дневном освещении от насыщенного ультрафиолета используют красный светофильтр—-возрастает читаемость по цветам!
Угол обзора объектива FOV указывается по диагонали—-но обычно на практике оператору важен угол обзора по горизонтали!
При угле менее 90-100 гр почти нет оптического искажения по периферии картинки типа рыбий глаз—-естественное восприятие!
Оптимальный угол расположения камеры 30 гр вниз от горизонта для комфортного восприятия 3Д аксонометрии общего плана при наблюдении сверху на высотах 50-300м! При вертикальном положении распознавание образов затруднено!
При поиске “потеряшки” с высоты 30-50 м (чуть выше верхушек деревьев и строений) необходимо увеличить оптическое изображение 2-3 кратным зумом или замена объектива с панарамного в 90-110 гр на более узкий угол обзора 30-50 гр — это эквивалентно 2-3 кратному приближению цели!!!
ЖК монитор
В современных видео-мониторах на принципе жидкокристаллического затенения пиксела на матрице от свето-диодной задней подсветки в белом цвете имеется контрастность изображения от 400 до 1000 при воспроизведении до 16 миллионов цветов! Разнообразие цветов и оттенков получается смешением трёх основных монохромных цветов—- голубой, зелёный, красный!
Чем выше разрешающая способность матрицы видео-монитора и габариты, тем более подробную картинку по мелким деталям возможно прочитать при наличии высококачественного сигнала с борта дрона! Например для аналогово видео разрешение на экран не более 800х600 пикселей! Электропотребление обычно не более 1-10вт в зависимости от габаритов!
Используя эффект картинка в картинке можно сразу наблюдать курсовое изображение с наложенной телеметрией в углу и основное высококачественное в центре или дистанционно переключать камеры на борту!
Для комфортного наблюдения необходимо применять только матовый экран, чтобы постороние блики не раздражали восприятие картинки!
Самый удобный формакор видеомонитора на улице это шлем—–нет засветки от неба и большой экран в отличии от очков!!!
более подробно смотри статью “аналог против цифры-онлайн видео”