
.jpg "Квадрокоптер Eachine E520 и Eachine E520S - клон Mavic - Все о квадрокоптерах | PROFPV.RU")
- Почему квадрокоптер тянет в сторону
- 20 советов пилоту dji mavic mini, чтобы уберечь свой дрон от крушений и утраты
- Почему квадрокоптер не взлетает с земли?
- Не включается (не взлетает, не работает) квадрокоптер: ищем и устраняем причины
- Особенности включают в себя:
- Пластик и сборка
- Подключите радиоприемник: pwm или ppm сигналы
- Советы которые смогут помочь защитить ваш аппарат от повреждений
Почему квадрокоптер тянет в сторону
Ситуация, в которой квадрокоптер кренит набок или не взлетает, очень распространенная проблема. Вызывают неполадку несколько причин:
- Неправильные настройки. Перед отправкой в магазины дроны подготавливают для полета, но в процессе многочисленных транспортировок калибровка может сбиться.
- Слишком туго насажен один из винтов. Если при сборке допущена ошибка, и какой-то пропеллер вращается с большим усилием, нежели остальные, квадрокоптер будет тянуть в сторону.
- На ось двигателя в месте крепления винта намотались нитки, травинки или волосы. Такое часто случается со старыми дронами — сам пропеллер в порядке, но лишние элементы тормозят его вращение.
Еще одна причина, по которой квадрокоптер может тянуть в сторону, это ошибка при самостоятельной замене винта. Хрупкие пропеллеры часто ломаются, для устранения поломки необязательно обращаться к профессионалам — детали стоят дешево и не являются дефицитом.

20 советов пилоту dji mavic mini, чтобы уберечь свой дрон от крушений и утраты

Адекватная цена на летающую камеру профессионального качества, компактный размер, простое управление и большой ресурс аккумуляторов уже сделали Миник «народным» дроном для фотографов, путешественников и энтузиастов.
Но этот квадрокоптер — не для рекордов высоты, дальности и скорости. Он очень лёгкий, боится ветра и темноты, теряет сигнал пульта даже при незначительных помехах. Поэтому запаситесь терпением, придержите свои амбиции пилота — покорителя высот, и желание делать крутые кадры уровня Mavic 2 Pro или Inspire.
В этой статье Вы найдёте два десятка рекомендаций, основных на моём личном опыте эксплуатации DJI Mavic Mini, которые уберегут начинающего пилота от глупых ошибок и не очевидных опасных ситуаций.
1. Подпишите свой дрон. Наклейте наклейку с Вашим WhatsApp и Email. Если Вы потеряете квадрокоптер и его найдёт кто-то другой, то есть шанс, что с Вами свяжутся и вернут потеряшку.
2. Следите за RC кабелем от смартфона к пульту. Он маленький, чёрный и поэтому его очень легко потерять, а запаски нет даже в FMC комплекте. Оригинальных кабелей на замену в магазинах DJI я не нашёл. Купил на Алиэкспресс аналог с более громоздкими штекерами. А пока ждал доставку, полтора месяца колхозил метровую «кишку» из переходников и подручных средств, чтобы хоть как-то летать.
3. Не забывайте включать авиа-режим на Вашем смартфоне при управлении квадрокоптером. Звонок друга или смс от любимой могут стоить Вам дрона.
4. Будьте внимательны при полётах над водой ниже уровня взлёта, например с высокого берега или с борта корабля. Дрон теряет позиционирование по высоте, из за бликов, отражений и волн не видит расстояние до поверхности и пытается приземлиться. Если при этом будет потеря сигнала с пультом, то до твёрдой поверхности Вы уже не дотянете и утопите свой коптер. Вообще, при любых полётах над водой — потеря дрона лишь вопрос времени.
5. Не запускайте дрон в сильный ветер. Мавик Мини очень лёгкий. Поэтому ему сложно бороться с порывами ветра. Если Вы летаете рядом с деревьями, зданиями или другими объектами, есть риск шарахнуть дрон об стену или запутаться в ветвях.
6. Планируйте направление полёта всегда против ветра, чтобы было легче возвращаться с попутным ветром. Одна из самых распространённых причин потери дронов — не хватает мощности и заряда аккумулятора, чтобы вернуться на базу против ветра.
7. Не летайте в плохо освещенных помещениях без защиты винтов. Железобетон и бытовая техника блокируют GPS, искажают радиосигнал и дают помехи на компас. Квадрокоптер ориентируется только по фото-датчикам поверхности, а в темноте ему это сложновато. Поэтому можно влететь в мебель, стену или Ваших домочадцев.
8. При полётах в городе избегайте локаций с сотовыми ретрансляторами (группы направленных прямоугольных антенн на крышах) так как они нарушают связь с пультом уже на дистанции 30 метров.
9. Заранее продумайте высоту и траекторию автоматического возврата дрона. На пути не должно быть зданий, деревьев, труб, вышек и мачт освещения. И особенно проводов.
10. Если Вы все же не смогли вернуть дрон на базу и он совершил аварийную посадку или потерпел крушение вне зоны прямой видимости, то не спешите прыгать в авто и ехать к точке на карте. При принудительной посадке на пустом аккумуляторе у Вас есть ещё около 10 минут, чтобы найти свой коптер. Если расстояние до точки меньше километра, (вряд ли Вы улетите на Минике дальше без потери сигнала), быстро идите напрямую пешком.
11. Не улетайте далеко в городе и не залетайте за здания. По моему опыту: залетел за здание — потерял связь и контроль.
12. Возвращайтесь в зону прямой видимости уже на 50% аккумулятора. При зарядке менее 20% летайте толко рядом с собой над твёрдой ровной поверхностью.
13. Не взлетайте из пыли, песка, снега или травы и не приземляйте дрон на такие поверхности. Контакт с любыми инородными частицами может привести к быстрому износу и разрушению механических и электронных частей — винтов, моторов, аккумулятора, электронной платы, подвеса стабилизатора и камеры.
14. Не взлетайте, не летайте и не приземляйте дрон рядом с животными или птицами. Небольшой размер и жужжание Мавика Мини вызывают агрессию и провоцируют нападение животного или птицы на Ваш коптер. На фото к этой статье — та самая собака, из пасти которой я буквально вырвал свой Миник!
15. Не вылетайте из окна или в форточку. При потере сигнала пульта, что не редкость рядом со зданиями, дрон поднимется на высоту возврата и, вернувшись по координатам взлёта, сядет на крыше или свалится вниз, задев какие-нибудь конструкции. Также не исключён риск краша об оконную раму при глюке GPS, порыве ветра или резком управлении.
16. Следите за тем, в каком режиме Вы управляете дроном. Я нередко ловлю себя на том, что перешёл в спорт режим и ношусь между домами и деревьями без всяких датчиков.
17. Не летайте без защиты винтов рядом с людьми. Глюк GPS, порыв ветра или ошибка управления может привести к травмам. И вообще, постарайтесь не летать над людьми.
18. Не используйте интеллектуальные режимы в лесу и в городе, где дрон может столкнуться с каким либо объектом при облёте.
19. Не снижайте скорость при пролётах через узкие места с надголовной средой — окна, трубы, под мостами, через салон автомобиля, под упавшими деревьями, насквозь опоры ЛЭП и т. д. Датчик может определить помеху снизу и коптер рванёт резко вверх.
20. Всегда надевайте защитную крышку камеры при транспортировке дрона в кейсе, чехле или в кармане, чтобы не заляпать камеру и не сломать подвес стабилизатора.
Будьте внимательны, осторожны и готовы ко всему — тогда количество нештатных ситуаций будет меньше. Пишите свои наблюдения и рекомендации по эксплуатации, пилотированию и съёмке с Мавика Мини в комментариях. Посмотрите мои фотографии с этого квадрокоптера в Инстаграм по хештегу #фото_города_с_воздуха.
Хороших Вам полётов и удачных кадров!
Почему квадрокоптер не взлетает с земли?
«Почему квадрокоптер не взлетает?» — частый вопрос и начинающих, и опытных пользователей летательных аппаратов. Безусловно, обидно, когда аппарат, купленный для получения удовольствия, приносит разочарование, и особенно обидно, когда на квадрокоптере не было совершено еще ни одного полёта.
Первое, с чего стоит начать, – это понять, что квадрокоптер хоть и не производит впечатления очень сложной техники, но всё же таковой является. И как у любого технически сложного устройства, у дрона имеются сотни жизненно важных деталей – даже поломка одной из них может привести к тому, что ваш квадрокоптер не сможет оторваться от земли.

Если с вами приключилась эта неприятность, не стоит переживать и тут же начинать жалеть о своём приобретении – некоторые из проблем, не дающих квадрокоптеру летать, легко устранить своими руками. Первая из них – неправильное положение винтов. Винты – один из основных компонентов успешных полётов дрона, по своей важности они стоят наравне с его двигателем. Все винты квадрокоптера должны располагаться на устройстве в определенном порядке – у каждой модели дрона он свой и схематически указывается в инструкции к устройству. Так что если коптер никак не хочет подниматься в воздух, в первую очередь проверяйте винты.
Следующие возможные проблемы более серьезны. И здесь есть два пути решения: если ваш квадрокоптер новый, винты расположены согласно указаниям, а дрон так и не взлетает, – обратитесь к вашему продавцу – возможно, именно вам достался брак. Если же коптер не новый и уже испытал на своем корпусе падения и удары о препятствия, то вам придется внимательно осмотреть его «начинку» или же отнести в сервисный центр.

Если вы приняли решение самостоятельно выявить проблему и решить её, то продолжаем. Не взлетать квадрокоптер может и из-за проблем с электроникой и двигателем.
Начнем с последнего – если есть подозрения в неисправности двигателя, стоит его тщательно проверить. Наиболее часто встречающаяся поломка двигателя – сгорание. В этом случае деталь не подлежит ремонту и требуется её замена. Но даже в этой ситуации можно увидеть плюсы: возросшая популярность квадрокоптеров и радиомоделей повлекла за собой и увеличение магазинов, специализирующихся на продаже запасных частей для их ремонта.
В таких магазинах вы сможете подобрать новый двигатель для своего аппарата и возможно даже увеличить его мощность для более быстрых и дальних полётов. Установка нового двигателя – достаточно простой процесс, но если вы хотите довериться специалистам, в сервисном центре замену произведут за пару минут.

Проблемы с взлётом квадрокоптера могут означать и неисправность его электроники – от аккумулятора до соединительных проводов.
Немаловажную роль в полётах имеет и пульт управления дроном, так что если проверка не выявила проблем с электрикой и двигателем, обратите своё внимание не него. Самое элементарное, что можно проверить за несколько секунд – исправность батареек и наличие в них заряда. Если не помогло и это, то причину придется искать во внутренностях пульта, проверяя все провода, контакты и платы.
Посмотреть на ремонт квадрокоптера на примере Syma X5C вы можете на видео:
Шаблоны Инстаграм БЕСПЛАТНО
Хотите получить БЕСПЛАТНЫЙ набор шаблонов для красивого Инстаграма?
Напишите моему чат-помощнику в Telegram ниже 👇
Вы получите: 🎭 Бесплатные шаблоны “Bezh”, “Akvarel”, “Gold”
Telegram Viber Vkontakte
или пишите “Хочу бесплатные шаблоны” в директ Инстаграм @shablonoved.ru
Шаблоны Инстаграм БЕСПЛАТНО
Хотите получить БЕСПЛАТНЫЙ набор шаблонов для красивого Инстаграма?
Напишите моему чат-помощнику в Telegram ниже 👇
Вы получите: 🎭 Бесплатные шаблоны “Bezh”, “Akvarel”, “Gold”
Telegram Viber Vkontakte
или пишите “Хочу бесплатные шаблоны” в директ Инстаграм @shablonoved.ru
Не включается (не взлетает, не работает) квадрокоптер: ищем и устраняем причины
Неполадка |
|
|
Квадрокоптер не связывается с передатчиком | Стик газа стоит в неправильном положении | Зафиксируйте газ до упора на себя и не двигайте стик до тех пор, пока дрон не свяжется с аппаратурой |
Потух индикатор на пульте дистанционного управления | Батарейки разрядились | Заменить элементы питания |
Посторонние шумы при полете дрона, лишняя вибрация | Поврежден корпус и/или пропеллеры квадрокоптера | Определите дефект «на глаз», осторожно выровняйте поврежденный пропеллер или замените его |
Электродвигатели работают, но беспилотник не взлетает | Неправильно установлены винты | Проверьте маркировку каждого пропеллера и установите винты согласно схеме в руководстве пользователя |
Отказал мотор | Нарушены контакты или сгорел двигатель | Проверьте провода и контакты, идущие к двигателю и полетному контроллеру; если визуально все хорошо, то возможны проблемы с двигателем или контроллером. Нужна помощь мастера |
Квадрокоптер резко реагирует на команды пульта ДУ | Возможно, выбран режим «эксперт» | Начинать полеты рекомендовано с режима для новичков; выберите режим пилотирования согласно вашим навыкам |
Квадрокоптер не выполняет сложные фигуры | 1.Неправильно выбран режим полета 2.Аккумулятор дрона на низком уровне | 1.Убедитесь, что выбран режим «эксперт» 2.Проверьте уровень заряда АКБ, может дрону просто «не хватает силы» |
Коптер постоянно «несет» в одну из сторон | Неправильная калибровка | Установите дрон на ровной поверхности, сделайте подкладку тонкого картона под тот луч, в сторону которого коптер отклоняется в полете. Проведите калибровку. Проблема должна исчезнуть |
Нестабильный полет | 1. Проблемы с калибровкой 2.Низкий заряд АКБ | 1.Установите дрон на максимально ровную поверхность и проведите калибровку повторно. При необходимости проведите дополнительное триммирование 2.Зарядите аккумулятор полностью |
Если наши советы вам помогли, рады были вам помочь. Если неполадки остались – обращайтесь к нашим специалистам.
RC-Hobby предлагает ремонт радиоуправляемых моделей любой степени сложности, а консультации по телефону мы даем абсолютно бесплатно.
Особенности включают в себя:
Высокоточная подержка удержания высоты позволит спокойно летать сразу.
Или выбререте удивительный режим “простой полет” (Simple mode), что делает ArduCopter одним из самых простых в управлении.
Не беспокойтесь за слежением орентации вашего квадрокоптера, пусть полетный контролер этим занимается сам!
Вам не потребуются знания в программировании. Просто используйте простую в использовании программу на
рабочем столе, что бы загрузить последнюю прошивку одним щелчком мыши и настройте с помощью
программного обеспечения Mission Planner нужные вам режимы. Используйте эту программу в
качестве мощной наземной станции (Ground Station).
Сотни GPS точек ждут вас (точное число зависит от памяти полетного контроллера,
ArduCopter подерживает 127 точек, но есть и более продвинутые системы на базе PX4).
Просто поставте точку в Mission Planner и ArduCopter полетит к ним.
RTL (Вернуться на старте). Щелкните переключаетелем , что бы вернуть ArduCopter на место старта автоматически.
Планирование всех миссий доступны через опциональную двухстороннюю связь.
Путевые точки, смена режимов полета, даже тюнинг может быть сделан с
вашего ноутбука, в то время как аппарат находиться в воздухе!
Автоматический взлет и посадка. Просто введите аппарат в этот режим
и смотрите как ArduCopter сам выполнит свою миссию полностью автономно,
вернувшись домой сядет на землю перед вами.
В связи с богатым набором функций и полностью автономных возможностей АРМ,
кривая обучения может выглядеть несколько пугающим.
К счастью набор исчерпывающей информации сделает это стремление очень простым и достижимым.
Пожалуйста, не поддавайтесь искушению пропустить шаги и бросаться к быстрому полету.
Это робототехника и авиация комбинированного типа из которых являются довольно
сложными вещи сами по себе. Следуйте инструкциям и у вас будет свой робот
в воздухе.
Пластик и сборка
Пластик имеет резино-бархатное напыление, на котором не остаются отпечатки пальцев, а вот пыль остается, но это лучше, чем какой-нибудь глянцевый пластик. Сам пластик среднего качества, который соответствует цена = качество.
По сборке: ничего не люфтит и не болтается, винтики вкручены до упора и их достаточно много, что создает достаточную жесткость конструкции. При первом полете неудачно долетел до веток сосны и дрон упал с 5 метровой высоты — ничего не сломалось и даже не осталось царапин на лопастях, так как они сделаны из мягкого пластика.
Складываются лучи плотно и легко, в момент раскладывания, происходит щелчок в каждом луче — там внутри есть специальный упор, который щелкает и фиксирует лучи.
По камере: камера без какого-либо механизма движения, хотя в инструкции можно найти строку, что при нажатии определенной кнопки, камера опускается или поднимается на 10 градусов за нажатие, но это неправда, так как я разобрал эту камеру и там нет никаких механизмов, сама камера держится просто на пластиковых ручках.
По пульту: дизайн как у пульта Мавика, но из значительно более дешевого пластика, но опять же, цена = качество. Внизу выдвигается держатель для телефона, можно засунуть достаточно большой. В качестве регулирующего механизма — пружины. Телефон держится крепко, а на нижней плашке есть покрытие из вспененного материала, чтобы на телефоне не остались царапины.
В пульте есть пищалка, которая будет пищать при различных условиях. Питается от 4 мизинчиковых батареек. Если отключить питание пульта, квадрокоптер Eachine E520S включит программу возврата домой и полетит на свой завод в Китай. Шучу, полетит он на место своего взлета, поэтому, после включения квадрокоптера и калибровки, дайте ему поймать нужное количество спутников (7 штук).
По моторам: двигатели здесь бесколлекторные, с таким же корпусом (закрытого типа, где внешняя часть не крутится) как и у своего оригинала. Работают достаточно громко, думается, что там не топовые подшипники, иначе, там бы только двигатели вышли в цену этого квадрокоптера. Тяга хорошая, квадрокоптер достаточно маневренный на этих моторах.
Наши читатели сообщили, что у двигателей интересная конструкция и они не бесколлекторные:
Игорь:
Двигатели у него коллекторные, замаскированные под бесколлекторные гипоидной передачей, как в заднем редукторе жигулей, то есть, мотор лежит горизонтально по отношению к вертикальному валу, отсюда и такие шумные двигатели из-за такой передачи.
Получается, что производитель вводит в заблуждение.
По аккумулятору: заряжать можно только через USB. Внешним зарядным устройством, например, iMax b6, зарядить нельзя. Время полета — 14-16 минут. Аккумулятор вставляется в отсек плотно и до щелчка. Во время полета точно не вывалится.
По дальности полета: все в пределах заявленной дальности производителя, тут работает физика и ничего более. При достижении порога в 200 метров в открытом поле 200 метров, вы уже в реальном времени не сможете принимать видео, а еще около 50-100 метров и управлять.
Тогда квадркоптер сам вернется на базу. Зато можно включить режим Полет по точкам, выставить точки и квадрокоптер сам пролетит нужное вам поле и вернется обратно, только не создавайте слишком большое расстояние, ему может не хватит заряда на возврат.
По приложению фото и видео — будет немного позже, возникли некоторые сложности.
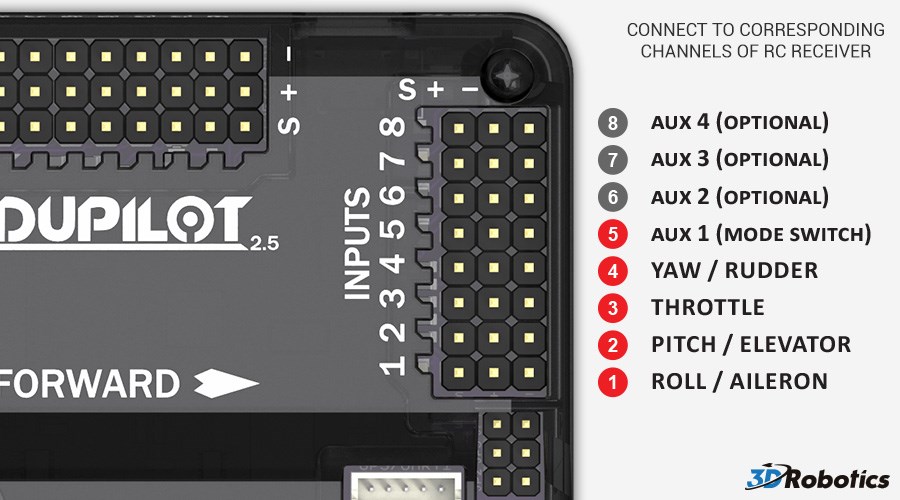
Подключите радиоприемник: pwm или ppm сигналы
- для управления по радио через ШИМ (PWM) подключите радиоприемник к APM входных сигнальных контактов используя разъемы для подключения канала 1 к APM сигнала конекторами с надпиьсь 1 , канал 2 к конекторам 2 и т.д. Кроме того, необходимо убедиться в том, что приемник будет питаться от APM.
- для управления по радио через PPM необходимо подключить первый канал и перемкнуть перемычкой входы 2 и 3 , как показано на картинке. Выводы на приемнике могут варьироваться , поэтому обратитесь к документации на ваш приемник.
После скачивания и установки Mission Planner на вашу наземную станцию, подключите APM к компьютеру используя микро-USB провод.
Не подключайте провод к USB-хабу , подключайте провод к компьютеру.

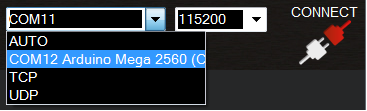
После установки Mission Planner подключите через micro-USB APM с системой Windows, которая автоматически определит
и предоставит драйвера для устройства, запустите программное обеспечение и выберите порт который будет указан
в списке, выберите необходимую скорость (по умолчанию это 115200 бод/с) как показано на рисунке
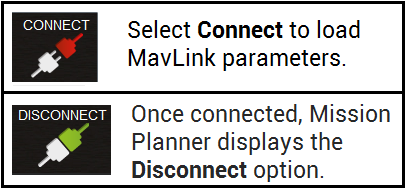
Выберите “соединение” в правом вверхнем углу экрана ,
что бы загрузить параметры MAVLINK в APM ,
Mission Planner будет показывать окно с параметрами загрузки данных.

Когда инициализация параметров пройдёт окно загрузки пропадёт.
Включите передатчик и убедитесь, что он в режиме самолета
(Полетному контроллеру необходим режим полета , независимо от платформы на
эксперементальной основе) и установите все стики по центру.

Левая ручка будет контролировать газ (THR) и рысканья (Yaw),
правая будет контролировать крен (Roll) и тангаж (Pitch) .
Трехпозиционный переключатель будет контролировать режимы полета.
В Mission Planner выберите “Radio Calibrating” ,
нажмите на “калибровка” и правом нижнем углу,
Mission Planner выведет окно,
что батарея не должна быть подключена ,
как и моторы с пропеллерами.
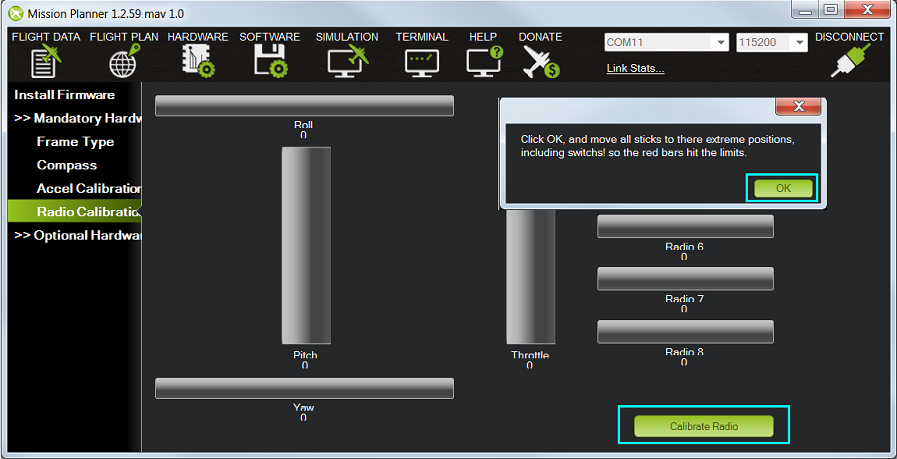
Нажмите “ок” и начните двигать стиками в каждую из сторон до предела,
а так же трехпозиционный тумблер. наблюдайте за результатами,
красные линии установят пределы минимамльного и максимального
значения вашего радиопередатчика.
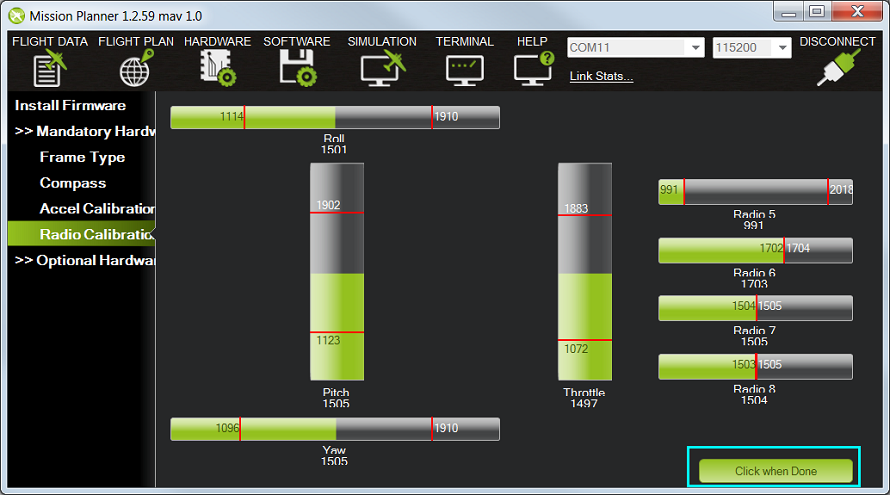
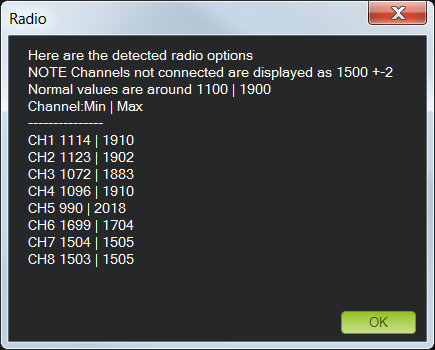
Когда все значения каналов радио смогли показать свой
минимум и максимум нажмите в программе “Done”.
Данные вам отобразятся в отдельном окне,
нормальное значение около 1100 для минимума и 1900 для максимума.
Советы которые смогут помочь защитить ваш аппарат от повреждений
- 1) избегайте резких и экстремальных полетов
- а) перемещайте стики плавно и не дёргайте их.
- б) если аппарат хорошо сбалансирован и настрое, то он потребует небольшое отклонение стиков, в отличии от “плавающих” и “кривых” аппаратов.
- 2) аппарат должен быть более менее стабильным в горизонтальной плоскости и не иметь дополнительных тримов с аппаратуры.
- а) если коптер “гуляет” в полете, вам прийдется отримировать его с аппаратуры.
- 3) будьте осторожны при подаче большого газа , так как аппарат может получить или потерять высоту (просадка батареи по мощности и нехватка газа на моторы с отключением мозгов и их перезагрузкой).
- 4) так как мультикоптеры симметричны вам очень лего дизарентироваться и потерять его в ориентации.
- а) для ручных полетов ориентация является важной частью для полетов, следите за ней
- б) во время обучения сохранайте орентацию аппарата с момента взлета и контролируйте её.
- в) рекомендуется по началу летать на растояние не более 10м но и не ближе , чем 3 м к себе.
- г) если вы отлетаете дальше чем 30 метров, то очень легко потерять ориентацию в пространстве – это может привети к аварии.
- д) если вы потеряли осевую ориентации (Yaw) во время полета, то попробуйте в режиме стабилизации лететь вперед и спользуя повоторы вокруг оси направлять его как автомобиль.
- е) это гораздо лучше, чем просто спуститься на землю не понимая орентацию, еще хуже – улететь.
- ж) отлетая часто получается , что наклоняя аппарат назад к пилоту вы видете , что он может отдаляться – это происходит из-за потери ориентации.
- з) Результат этого – аппарат улетает и разбивается.
- 5) всегда имейте режим стабилизации на аппаратуре.
- 6) порывы ветра могут сделать полет значительно труднее
- а) сильный ветер может препядствовать движению аппарата или вовсе загрутить его вокруг.
- б) чем выше вы находитесь на местносте , тем больше вероятность сильных ветров.
- в) переключение в режим Стабилизации и посадка позволит вам сохранить аппарат перед тем, как у вас появятся новые навыки пилотирования
- г) Избегайте высоких и скоростных полетов в разных режимов пока не появилась значительная увереность в пилотировании.
- д) при полете вокруг деревьев очень легко потерять визуальный контакт и ориентацию
- е) порывы ветра вокруг объектов, зданий, сооружений могут усугубить пилотирование
- ж) потеря радиосигнала тоже вероятна и может произойти в неподходящий момент.
- з) если ваш аппарат приближается к потенциальной помехе, то следует переключиться на режим стабилизации и вернуть его к себе.
- 7) Ardupilot конкретные спобобы безопасности: RTL, FailSafe , GeoFence
- а) RTL может обеспечить безопасное возращение к месту запуска, если он получит команду от вас.
- б) настройка FailSafe на радиомодуле может быть выполнена командами RTL или Auto Land , что бы сохранить аппарат и предотвратить от травм себя и окружающих.
- в) GeoFence устанвливает автоматический периметр, который заставит аппарат оставаться в безопасном месте.
- г) Не следует пологаться на выше указаные режимы для обеспечения безопасности, у вас всегда должна быть мысль о переводе аппарат в режим стабилизиции и переход в ручное управление, если что-то пойдёт не так.
- д) особенно не пологайтесь на эти режимы выполняя обучение или какие-либо другие маневры.
- е) эти режимы являюся дополнением и не являются заменой в безопасности
- 8) о первом взлете или о настройки контроллера
- а) в режиме стабилизации двигайте стик газа медленно, пока аппарат не зависнет
- б) если аппарат пытается перевернуться – опустите газ и устраните проблемму.
- в) двигатели могут быть настроены в неправильном направлении (см. схемы подключения)
- г) могут быть неправильно установлены пропеллеры
- д) если аппарат пытается крутиться вокруг своей оси или улететь в некотором направлении
- е) передатчик или настройки аппаратуры могут быть не правильными
- ж) двигатели или регуляторы могут быть настроены не правильно
- з) не правильные пропеллеры могут быть надеты не правильно на моторы
- 9) при полете FPV (вид от первого лица) с видеокамерой , вы должны иметь режимы: стабилизация , simple mode и RTL
- а) убедитесь, что RTL работает правильно перед использованием FPV
- б) используйте режим стабилизации при FPV полетах
- в) Если видеосвязь FPV прервалась вы можите переключить на simple mode или RTL для возращения домой.
- 10) убедитесь, что Ваш аккумулятор закреплен надежно
- а) используйте крепление-липучки
- б) можно использовать вклеенну поддержку для батареи для лучшего держания липучки.
и) если аппарат не может висеть стабильно над землей на уровне 2м то стоит решить эту проблему.
