

Относительно дешевый quadcopter на arduino с управлением от телефона, планшета, пк
Что вам понадобится для того, чтобы собрать и запустить в воздух свой квадрокоптер:
Ноутбук или компьютер с Processing[/b], скачать можно от сюда. Что такое “Processing”? Вот, что пишет об этом википедия :
Processing — открытый язык программирования, основанный на Java. Представляет собой лёгкий и быстрый инструментарий для людей, которые хотят программировать изображения, анимацию и интерфейсы.Используется студентами, художниками, дизайнерами, исследователями и любителями, для изучения, прототипирования и производства. Он создан для изучения основ компьютерного программирования в визуальном контексте и служит альбомным программным обеспечением (имеется в виду то, что каждый *.pde файл визуальной оболочки Processing’а представляет собой отдельное изображение или анимацию, и т. д.) и профессиональным производственным инструментом.
Arduino Software (IDE)[/b]
Андроид-устройство[/b], которое поддерживает режимUSB-хоста[/b](проверено на MotorolaXoom.
А так же паяльник, прямые руки, ножницы.
Что надо для изготовления рамы
Рама квадрокоптер делается из бамбуковых шашлычных палочек
Крепления двигателей к раме делаются из палочек для коктейля.
Изолента- используется для крепления платы приемника, электродвигателей к раме. Нитки нужны для скрепления деталей перед склейкой. Цианакриловый клей. Резинка для крепления аккумулятора к раме.
Список электроники для квадрокоптера.
Все эти детали могут быть повреждены во время пробных запусков или во время полетов, поэтому заказывайте с запасом. Ссылки даны для примера. Есть много поставщиков.
Лопасти для вертолета
Двигатели. Я не нашел двигатели с размерами 4х7 мм на Алиэкспресс нашел вот такие. Моторы должны быть без щеточные.
Плата приемника эта плата содержит все компоненты- гироскоп, акселометр, ESC (система курсовой устойчивости), CPU который все эти компоненты объединяет. Литий полимерный аккумулятор:1 x 240mah 1S ‘LiPo. Можно использовать разные аккумуляторы с меньшей или большей емкости. Если вы решите построить октакоптер, то вам понадобиться более емкая батарея.
Список аппаратного контроля квадрокоптера.
Это те части вашего будущего вертолета, которые позволят ему принимать ваши команды.
Приемопередатчик Учтите что в комплекте должны быть два модуля. И это не тоже самое что NRF24L01, что бы ни утверждал продаван.
Arduino DUE[/b]или аналогичный, он будет использоваться для связи вашего Андроид-устройства и A7105. Автор использовал именно эту плату Arduino потому, что она имеет USB подключенный к последовательному порту и может работать с 3.3в логикой, хотя можно применить преобразователь уровней 5-3.3в.
Макетная плата-на ней вы будете монтировать радио модуль и подключать его к Arduino. Резистор 22кОм- значение его не особо критично. Провода для соединения радио модуля. OTG переходник для вашего андроид устройства.
OTG
Hubsan-пульт дистанционного управления-это не обязательно, но удобно.
Создание каркаса.
Каркас изготавливается из бамбуковых палочек, скрепленных крест на крест с трубочками от коктейлей. Все это склеивается вместе супер клеем.
1: Распечатайте шаблон SVG в прикрепленном файле. Он сложнее, чем должен быть, но также используется для строительства октокоптера. Шаблон нужен, чтобы сделать правильный квадрат.
2. Отрежьте нитку по длине вашего предплечья.
3 Возьмите две палочки для коктейлей и держите их так, чтобы шашлычная палочка делила их пополам и они находились друг на против друга .
4 Начните оборачивать нитку сначала по одной диагонали , потом по другой, наматывайте равномерно ,пока нитка не кончится. Не беспокойтесь о том, что палочки смещаются, вы их позже приклеите клеем. Нитку возьмите длиной с ваше предплечье. Не волнуйтесь по поводу того, что палочки слишком длинные, позже они будут использоваться как крепления мотора и ноги квадрокоптера.
5. Возьмите еще две палочки для канапе и закрепите их как в предыдущем шаге , только на расстоянии 4 пальцев от ранее прикрепленных. Точное расстояние не важно, вы исправите его далее.
6. Положите шаблон на ровную поверхность, лучше использовать стекло.
7. Разместите ваши связанные вместе палочки, как показано на фото.
На данном этапе важно все сделать как можно точно. Квадрокоптеры не очень чувствительны к распределению веса, но если ваши моторы не будут направлены вертикально, вертолет будет не очень хорошо летать, так что проверьте все два раза. Чтобы крепления моторов были строго вертикальными, а все диагонали одинаковыми.
8 Пропитайте все ваши нити, связывающие палочки, супер клеем. Надо пропитать нити насквозь, стремитесь не сдвигать при этом ваш каркас. Подождите 2 минуты и переверните ваш шаблон, чтобы пропитать нитки клеем с обратной стороны. Еще через две минуты первая квадратный кронштейн будет готов готова.
9. Повторите все тоже самое для второго кронштейна.
10. Далее надо скрепить вместе два кронштейна, как было уже описано. Еще раз убедитесь, что все крепления моторов выставлены вертикально и кронштейны скрепляются строго по середине.
11. Обрежьте палочки примерно на длину 2 см с обеих сторон.
12. Отрежьте 4 палочки по 1.5 см , склейте их вместе квадратом, особо прочная склейка не нужна, это будет кронштейн для платы и батареи питания.
Следующий этап состоит из пайки ваших 4 моторов к плате 4Х приемника. Первое, что надо – это припаять провода питания на нижнюю часть платы. Далее мы будем ссылаться на эту ориентацию (плата лежит на “спине”)
Как подключать моторы.
На Hubsan х 4 платах есть контактные площадки для подключения светодиодов и моторов. Те, что для светодиодов имеют обозначение LED, туда НЕНАДО подключать моторы. Контакты для моторов помечены ve[/b]и–ve.[/b]
Возьмите один из ваших 4 моторов с черным и белым проводами и припаяйте их кЛЕВЫМ НИЖНИМ[/b]контактам платы, белым проводом к левому контакту пары. Возьмите мотор с красным и синим проводами и припаяйте его кЛЕВЫМ ВЕРХНИМ[/b]контактам, красным проводом к левому контакту пары.. Возьмите мотор с черными и белыми проводами и припаяйте их кПРАВЫМ ВЕРХНИМ[/b]контактам, черным проводом к левому контакту. Возьмите мотор с красным и синим проводами и припаяйте его кПРАВЫМ НИЖНИМ[/b]контактам, красным проводом к левому контакту пары.
В схеме подключения белый провод это черная пунктирная линия. Провода надо закрепить каплей горячего клея. Закрепите моторы двумя полосками изоленты шириной 5мм. Не стоит особо волноваться по поводу одинакового расположения моторов по высоте. После того,как моторы закреплены, надо надеть на оси пропеллеры. Используйте белый пропеллер для “переда”с противоположной стороны от проводов батареи) и чёрный пропеллер для”зада”. Это не так просто, как кажется, так. как одни лопасти сделаны для вращения по часовой стрелке, а другие , для вращения против часовой стрелки. На лопастях есть обозначения. Используйте лопасти с буквой “А[/b]” для левого верхнего и правого нижнего моторов. С буквой “В[/b]“, соответственно, для правого верхнего и левого нижнего моторов. Теперь вы можете прикрепить батарею к нижней части платы, автор использует для этой части резинку. Если у вас есть оригинальный hubsan контроллер, вы сможете поднять квадро в воздух. Если вертолёт трясёт в воздухе, значит, моторы стоят не строго вертикально. Подкладывая кусочки свернутой бумаги, можно выравнять моторы.
Сборка радиоуправления на arduino.
Этот пункт проекта расскажет как управлять вертолетом с помощью Андроид устройства,через последовательный порт Arduino.
Вам нужны 6 контактов на плате А7105. Слева GND. Справа-SDIO, SCK, SCS, GND, VCC.
Припаяйте жесткий одножильный провод, длиной 2 см, к каждому указанному выводу. Вставьте А7105 в макетную плату, так как показано на фото. Соедините выводы GND на плате arduino и два на А7105. Соедините вывод 3.3V на Arduino c выводом VCC на плате А7105. На разъеме SPI Arduino, соедините вывод MOSI с одним из выводов резистора , другой конец резистора соедините с пином SIDO на А7501.
По этой ссылке можно посмотреть где находится вывод MOSI
Вывод SCK Arduino c выводом SCK А7105 , SCS с платы А7105 на пин 10 Arduino . Синий резистор на фото не является частью проекта.
Arduino софт
Нижеследующий скетч использует хакнутую версию PhracturedBlue’s hubsan X4 и A7105 оригинал кода можно посмотреть здесь.
Подключить Ваш DUO к компьютеру через ‘Programming Port’. Скачайте зип фаил, загрузите скетч в Arduino и выгрузите его в DUO. Этот скетч обрабатывает команды с последовательного порта и преобразует их в команды платы управления вашего квадрокоптера. Этот скетч связывается с платой Hubsan по радио без последовательного порта, так что, если включите ваш коптер, а затем Arduino, и огни на коптере перестанут моргать, значит все в порядке.
Программное обеспечение для Андроид
Это программноеобеспечениедает вам простой контролер полета на базе андроид устройства. Для управления используется акселерометр и сенсорный экран вашего устройства. Планшет или телефон будет обмениваться данными с Arduino через порт USB.
Установка софта:
1 Надо разрешить отладку по USB и разрешить установку приложений не google play. Скачать приложение можно здесь
2Подключитесвое устройство через переходник OTG к Arduino, он будетзапитыватьсяот вашего телефона или планшета, поэтому проверьте, чтобы аккумулятор был полностью заряжен.
3 Подключите аккумулятор к коптеру и положите его на плоскую поверхность. Если огни перестали моргать, значит все в порядке.
4 Большой палец левой руки медленно сдвиньте по экрану, пропеллеры должны начать вращаться. Уберите палец и пропеллеры остановятся.
5 Проделайте все тоже самое, только разместите большой палец правой руки тоже на экране. Это позволит вам управлять вертолетом с помощью акселерометра, наклоняя ваше устройство вперед/назад, влево/вправо. Перемещая большой палец правой руки влево или вправо, вы будете закручивать вертолет влево или вправо вокруг оси. Если убрать правую руку с экрана, вертолет должен выровняться, не зависимо от положения акселерометра. Попробуйте. Перемещайте палец левой руки до тех пор, пока вертолет не взлетит. Помните – если убрать оба пальца- моторы остановятся.
Программное обеспечение для ПК
В архиве программа, которая управляет коптером через последовательный порт. Управляется коптер с помощью курсорных кнопок, и кнопок “A”/”Z”- дроссель. Автор сделал попытку заставить следовать коптер за объектом определенного цвета, но это пока не работает. Обещал выкладывать обновления.
Пример
Итак, учитывая все эти различные сравнительные характеристики, какую информацию вы можете получить о контроллере полёта и что может включать контроллер полета? В качестве примера мы выбрали Quadrino Nano Flight Controller.
Главный процессор
Используемый на борту ATMel ATMega2560 является одним из наиболее мощных Arduino-совместимых чипов ATMel. Хотя он имеет в общей сложности 100 выводов, включая 16 аналогово-цифровых каналов и пять портов SPI, из-за его небольшого размера и предполагаемого использования в качестве контроллера полёта, на плате присутствуют только некоторые из них.
- AVR vs PIC: AVR
- Процессор: 8-бит
- Рабочая частота: 16МГц
- Программная память/Flash: 256Кбайт
- SRAM: 8Кбайт
- EEPROM: 4Кбайт
- Дополнительные контакты ввода/вывода: 3 × I2C; 1 × UART; 2 × 10-контактных GPIO; Серво с 5 × выходами; OLED порт
- Аналого-цифровой преобразователь: 10-бит

Сенсоры
Quadrino Nano включает микросхему MPU9150 IMU, которая включает в себя 3-осевой гироскоп, 3-осевой акселерометр и 3-осевой магнитометр. Это помогает сделать плату достаточно маленькой, не жертвуя качеством датчика. Барометр MS5611 предоставляет данные о давлении и покрыт кусочком пены. Интегрированный Venus 838FLPx GPS с внешней GPS антенной (в комплекте).

Программное обеспечение
Quadrino Nano был создан специально для использования новейшего программного обеспечения MultiWii (на базе Arduino). Вместо того, чтобы изменять код Arduino напрямую, было создано отдельное, более графическое программное обеспечение.

Связь
- Прямой ввод от стандартного RC приёмника.
- Порт выделенного спутникового ресивера Spektrum
- Последовательный (SBus и/или Bluetooth или 3DR радиосвязи)

Дополнительные факторы
- Корпус: защитный полупрозрачный корпус входит в стандартную комплектацию
- Монтаж: Есть два основных способа крепления Quadrino Nano к дрону: винты и гайки или наклейка из вспененной резины.
- Компактная конструкция: сам контроллер (без учёта GPS антенны) имеет размеры 53 × 53мм.

Сенсоры
С точки зрения аппаратного обеспечения, контроллер полёта по сути является обычным программируемым микроконтроллером, только со специальными датчиками на борту. Как минимум, контроллер полёта будет включать в себя 3-осевой гироскоп, но без автовыравнивания. Не все контроллеры полёта оснащаются указанными ниже сенсорами, но они также могут включать их комбинацию:
- Акселерометр: Как следует из названия, акселерометры измеряют линейное ускорение по трем осям (назовём их: X, Y и Z). Обычно измеряется в «G (на рус. Же)». Стандартное (нормальное) значение, составляет g = 9.80665 м/с². Для определения положения, выход акселерометра может быть интегрирован дважды, правда из-за потерь на выходе объект может быть подвержен дрейфу. Самой значимой характеристикой трёхосевых акселерометров является то, что они регистрируют гравитацию, и как таковые, могут знать, в каком направлении «спуск». Это играет главную роль в обеспечении стабильности многороторного БЛА. Акселерометр должен быть установлен на контроллере полёта так, чтобы линейные оси совпадали с основными осями беспилотника.

- Гироскоп: Гироскоп измеряет скорость изменения углов по трём угловым осям (назовём их: альфа, бета и гамма). Обычно измеряется в градусах в секунду. Обратите внимание, что гироскоп не измеряет абсолютные углы напрямую, но вы можете выполнить итерацию, чтобы получить угол, который, как и у акселерометра, способствует дрейфу. Выход реального гироскопа имеет тенденцию быть аналоговым или I2C, но в большинстве случаев вам не нужно беспокоиться об этом, так как все поступающие данные обрабатываются кодом контроллера полёта. Гироскоп должен быть установлен так, чтобы его оси вращения совпадали с осями БПЛА.

- Инерционный измерительный блок (IMU): IMU — по сути, это небольшая плата, которая содержит как акселерометр, так и гироскоп (обычно многоосевые). Большинство из них включают трёхосевой акселерометр и трёхосевой гироскоп, другие могут включать дополнительные сенсоры, например трёхосевой магнитометр, обеспечивающий в общей сложности 9 осей измерения.

- Компас/Магнитометр: Электронный магнитный компас способный определять магнитное поле Земли и использовать эти данные для определения направления компаса беспилотника (относительно северного магнитного полюса). Этот сенсор почти всегда присутствует, если система имеет GPS вход и доступно от одной до трех осей.

- Давление/Барометр: Так как атмосферное давление изменяется по мере удаления от уровня моря, можно использовать сенсор давления, чтобы получить довольно точные показания высоты БПЛА. Для расчёта максимально точной высоты, большинство контроллеров полёта получают данные одновременно от сенсора давления и спутниковой системы навигации (GPS). При сборке обратите внимание, что предпочтительнее, чтобы отверстие в корпусе барометра было накрыто куском поролона, это уменьшить отрицательное влияние ветра на чип.

- Расстояние: Датчики расстояния все чаще используются на беспилотниках, поскольку GPS-координаты и датчики давления не могут рассказать вам, насколько далеко вы находитесь от земли (холма, горы или здания), либо столкнётесь ли вы с объектом или нет. Датчик расстояния, обращенный вниз, может быть основан на ультразвуковой, лазерной или лидарной технологии (ИК-сенсоры могут испытывать проблемы в работе при солнечном свете). Датчики расстояния редко входят в стандартный комплект полётного контроллера.

Управляем бесколлекторными двигателями, господа
Решил я рассказать «всему свету» о проблеме, с которой столкнулся при постройке своего проекта, и как мне удалось её решить.
А речь сегодня пойдет о бесколлекторных двигателях, о регуляторах хода и как ими управлять.
Что же такое бесколлекторный двигатель, я не буду долго расписывать (сами можете посмотреть Wiki), а скажу в 2х словах, это 3х фазный двигатель постоянного тока.
И приводится в движение сие чудо благодаря специальному регулятору, который последовательно переключает обмотки с определенной частотой.
Управляя частотой переключения обмоток мы управляем скоростью вращения ротора.
Ну что же, надеюсь тут все понято, идем дальше.
Первые проблемы
Были закуплены 2 комплекта двигатель регулятор, ждал около месяца, пришли.
Мною овладел приступ безудержного веселья по этому поводу, но, к сожалению, это было ненадолго….
Рассмотрев эти чудеса техники я решил подключить их к источнику питания, и тут то первое разочарование, тихий хлопок (как от КЗ) и тишина, светодиоды не горят, писка нет (а он должен быть), только крутится кулер на регуле, беда…
Побежал в ближайший Хобби магазин, и добрый консультант вынес вердикт: сгорел!
Со вторым такая же история, в общем ребята, не повезло, оба бракованные…
Ну хоть кошечка порадовалась:

Пришлось раскошелиться и купить у них регулятор по цене обоих комплектов (поджимали сроки).
Купил, подключил, все пищит, горит, работает, прям аж душа радуется! (на фото он выделен):
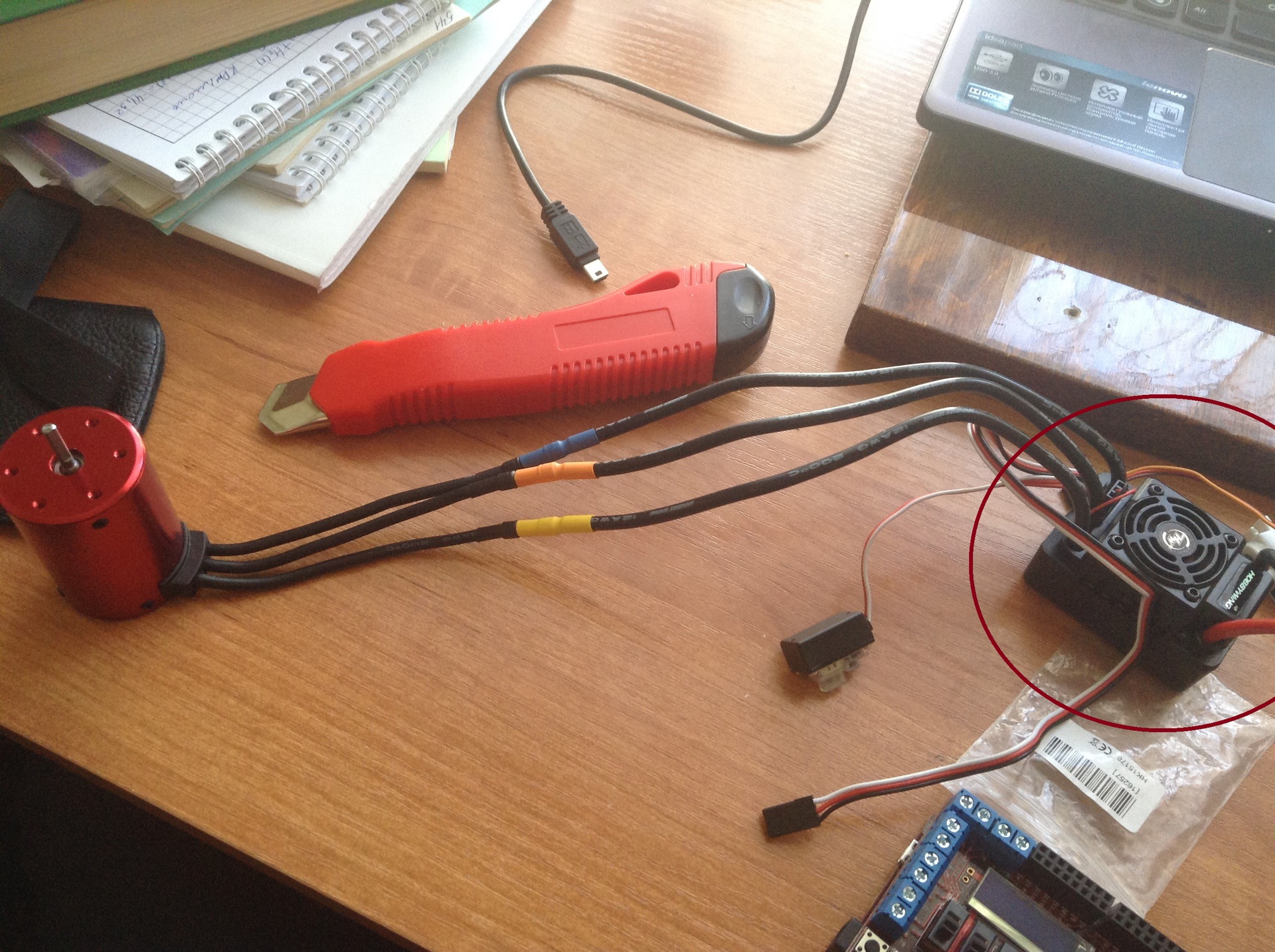
Проблема номер два
Теперь настала пора покрутить двигателем.
А покрутить нужно не с сервотестера или аппы радиоуправления, а с микроконтроллера, а точнее вот с такой платки: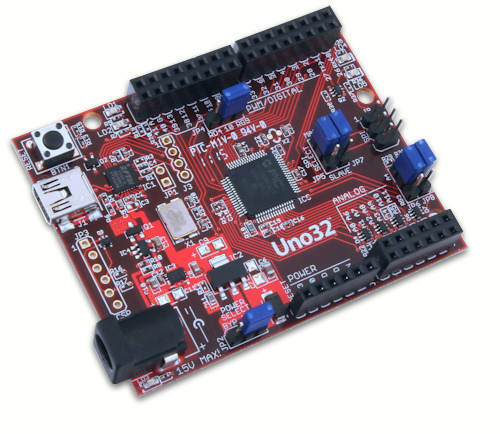
Перелопатив тонны сайтов, перечитав сотни форумов и ответов на мой вопрос, так как же управлять этим регулятором я слышать только одно: «…чувак да там простой ШИМ…», «… ШИМ тебе в помощь…».
Ну ШИМ, так ШИМ.
Написал простенькую программу:
#include <Servo.h>
Servo motor;
int mot_pin = 7; //Подключаем левый мотор к пину 7
int js_position = 800;
int max_position = 3000;
void setup()
{
motor_teft.attach(mot_pin, js_position, max_position); //Инициальзация мотора
}
void loop()
{
motor.write(1800); //Записываем положение и отправляем на регулятор
}
Залил, ноль эмоций…
Бился 2 дня, пока не наткнулся на случайный пост, о том, что у регулятора есть защита, и он начинает функционировать только при подаче на его вход ШИМ сигнала 1,5 мс.
Окей, будет сделано.
Дальше я подцепил обыкновенный резистор через АЦП, и опытным путем подобрал крайние значения ШИМ регулятора.
Код получившийся в итоге:
#include <Servo.h>
Servo motor_teft;
Servo motor_right;
int mot_pin_left = 7; //Подключаем левый мотор к пину 7
int mot_pin_right = 8; //Подключаем правый мотор к пину 8
int js_position = 1500; //Начальная позиция, всегда 1.5 мс для регуляторов бесколлекторных двигателей
int max_position = 2300; //Максимальное значение ШИМ 2.3 мс
int min_position = 800; //Минимальное значени ШИМ 0.8 мс
int start = 1; //Флаг задержки запуска
void setup()
{
motor_teft.attach(mot_pin_left, js_position, max_position); //Инициальзация левого мотора (порт, начальная позиция, максимальная позиция) !!!
motor_right.attach(mot_pin_right, js_position, max_position); //Инициальзация правого мотора (порт, начальная позиция, максимальная позиция) !!!
}
void loop()
{
//Начальная установка регуляторов в нулевое положение
if(start == 1) {
motor_teft.write(js_position);
motor_right.write(js_position);
delay(700);
start = 0;
}
js_position = analogRead(A0); //Считывание положения потенциометра
js_position = map(js_position, 0, 1023, 75, 140); //Преобразование положения потенциометра в угол поворота
motor_left.write(js_position); //Записываем положение и отправляем на регулятор левого мотора
motor_right.write(js_position); //Записываем положение и отправляем на регулятор правого мотора
delay(20); //Задержка цикла 20 мс
}
И все заработало.
Теперь все крутиться, шумит, пищит и просто радует.
P.S. Это код для управления сразу 2мя двигателями.
И последняя проблема, питание…
Здесь расскажу немного, а именно, от регулятора идет 3 провода: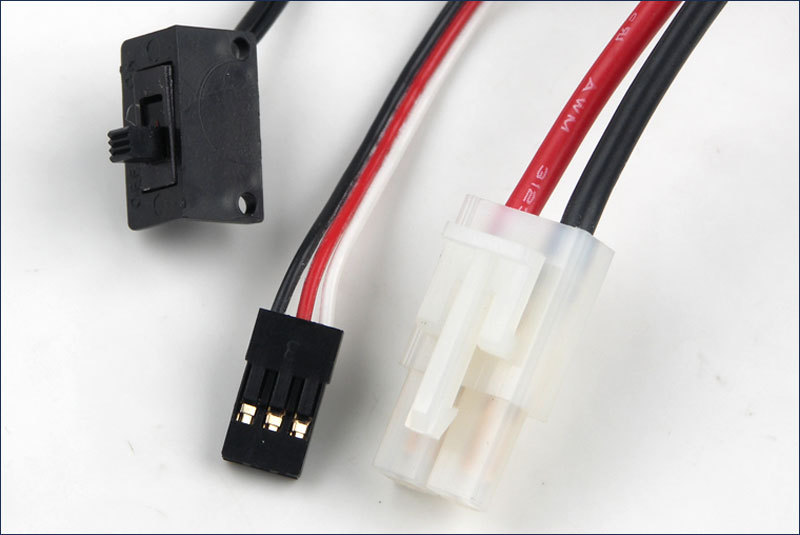
Центральная колодка, по порядку Черный — минус, Красный — плюс и Белый — провод управления.
И загвоздка в том, что в отличие от сервоприводов, это не входы под питание, а выходы, т.е. питаемся от них.
К чему я это, да к тому, что подключив регулятор как серву, я чуть не спалил порты на ноутбуке, ибо плата в это время была запитана от USB.
Но к счастью у моего старичка сработала защита и все обошлось перезагрузкой…
Видео работы:
Спасибо большое за внимание.
Надеюсь мой опыт будет полезен для вас.
До скорых встреч.


, цена 4600 руб")




