

- Что такое и зачем он нужен?
- Почему так популярен?
- Arducopter
- Arf (almost ready to fly)
- Bnf (bind-and-fly)
- Gps система
- G-сенсора мобильного устройства
- Kaptainkuk
- Mikrokopter
- Multiwii
- Pixelito
- Rtf (ready to fly)
- Батарея
- Бесколлекторные подвесы (brushless gimbal)
- Бпла и современное законодательство
- Будущее дронов
- Будущее индустрии.
- Виды квадрокоптеров
- Виды управления
- Гоночные коптеры
- Дальнейшее развитие и перспективы
- Датчики обнаружения препятствий
- Для новичков
- Если сомневаешься — ставь больше пропеллеров!
- За и против
- Законодательство
- Зачем и для чего нужен
- Из чего состоит
- История
- Как летает квадрокоптер
- Как летает квадрокоптер?
- Коммерческие системы
- Кто придумал и изобрел
- Кто придумал?
- Летающий “автомобиль” для армии сша.
- Лидеры -китайские компании
- Лучшие характеристики современных квадрокоптеров
- Любительские модели
- Морфологические и синтаксические свойства[править]
- Мотор
- Мультикоптеры
- Наличие камер высокого формата
- Особенности
- Первые коммерческие дроны для аэросъемки.
- Платы управления и полетный контроллер
- Подвес с камерой
- Предпосылки к появлению электрического вертикального взлета
- Принцип работы квадрокоптера
- Профессиональные
- Пульт со смартфоном
- Радиус полета
- Развитие электрического вертолетостроения
- Регуляторы оборотов
- Семантические свойства[править]
- Сложности в управлении
- Смартфон без пду
- Только пульт
- Трансмиттер и пульт управления
- Улучшения и повышение стабилизации полета
- Устройство и принцип работы
- Устройство квадрокоптера
- Цены на квадрокоптеры в 2020 году
Что такое и зачем он нужен?
Квадрокоптер – англоязычный термин, дословно переводимый на русский, как «четырехвинтовой вертолет». Но что это означает на практике? По сути, это беспилотник (летательный аппарат на ДПУ), оснащенный четырьмя винтовыми пропеллерами. Управление осуществляется посредством специального RC-пульта с земли.
На большинстве современных моделей дронов установлены миниатюрные видеокамеры, обеспечивающие возможности съемки в фото- и видеоформате с воздуха.
https://www.youtube.com/watch?v=MtdSSyrbrSA
Как только первые квадрики появились на прилавках магазинов беспилотной техники на радиоуправлении, их цена едва ли могла привлечь обывателя. Но со временем стоимость таких гаджетов продолжала стремительно падать (собственно, она продолжает падать со времен своего появления до сих пор, а ценовой диапазон – расширяться до бесконечных пределов). Сегодня они доступны многим людям со средним достатком.
Появились и квады с камерой, которые стали настоящим бумом среди широких масс любителей БПЛА. Таким образом, сфера их применения существенно развернулась по всем фронтам, привлекая внимания людей всех возрастов, от школьников и дошколят, до людей пенсионного возраста, любителей и профи в сфере беспилотных полетов, любителей спортивных состязаний на мультикоптерах, журналистов, блогеров, репортеров и даже представителей военно-разведывательных структур.
Современные технологии дроностроения шагнули далеко вперед в последние годы. Но в большинстве случаев на вопрос о том, что такое коптер и каково его предназначение, люди склонны отвечать – это гаджет для развлечения и захватывающих любительских съемок с высоты.
Почему так популярен?
Ошеломительную популярность эти устройства получили в последние несколько лет, во многом благодаря параллельному развитию мобильных и видеотехнологий. С появлением высокотехнологичных смартфонов и повсеместными селфи, актуальными стали и так называемые селфи-дроны – миниатюрные беспилотники с камерой, позволяющие делать отменные селфи и видео.
Arducopter
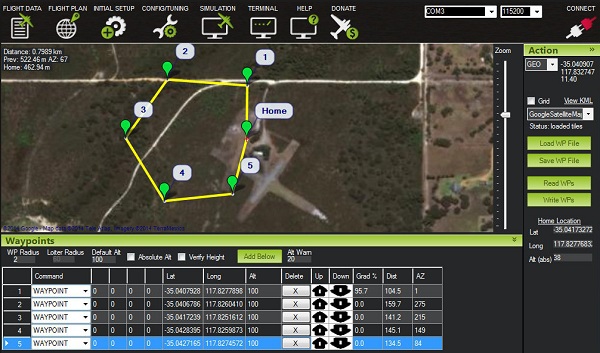
Еще одна система, основанная на Arduino, пошла дальше всех. Сейчас это система с возможностью программируемого полета по точкам, поддержкой радиомодемов и передачи телеметрии, хранения различных логов и пр.
Их софт выглядит примерно так:
до таких
Arf (almost ready to fly)
Пользователи, желающие собрать БПЛА самостоятельно, могут приобрести комплект Quadcopter KIT. Иногда встречается и другое название такого конструктора – ARF (Почти готовый к полётам). Данный набор поставляется как с пультом, так и без него. Квадрокоптер приобретается в разобранном виде.
Bnf (bind-and-fly)
Второй набор называется BNF (Привязывай и лети). В этом комплекте отсутствует ПДУ. Пилот должен работать с пультом, уже имеющимся в его распоряжении или его приобрести отдельно.
Gps система
Наличие GPS уже становится почти обязательным. Спутниковая система способна определить местонахождение дрона с высокой точностью и не даст его потерять. Более того, она позволяет преодолеть маршрут, проложенный пилотом на карте.
Самые продвинутые летательные аппараты нашего времени способны взлетать на 5000 м. Полеты в верхних слоях атмосферы связаны с разрежением воздуха и снижением его температуры. На лучших моделях эти проблемы компенсируются крупными винтами и автономной системой подогрева.
G-сенсора мобильного устройства
Третьим способом взаимодействия с дроном считается применение G-сенсора мобильного устройства, который отслеживает пространственную ориентацию операторского смартфона и переводит дрон в аналогичное положение. Простыми словами, управление с помощью наклона гаджета.
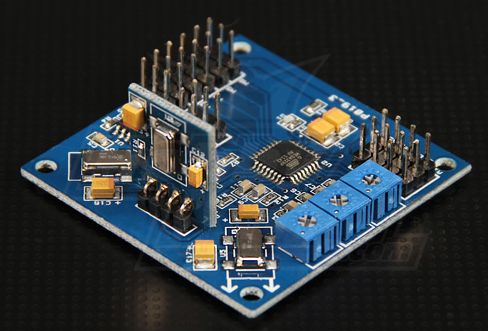
Kaptainkuk
Одна из самых простых систем, выпускаемых (в различных версиях) с 2020 года и до сих пор. Плата управления имеет только 3 гироскопа, для регулировки параметров используются обычные переменные резисторы.
Mikrokopter
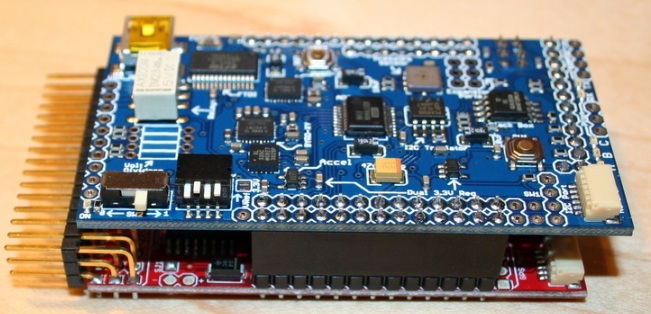
Легендарная немецкая компания, благодаря инженерам которой в 2006 году появился первый аппарат. Контроллер имел на борту процессор Atmega644 c 4Кбайт памяти и частотой до 20МГц, 3 гироскопа по каждой из осей, акселерометр (для возможности горизонтального полета) и барометр для удержания высоты (точность барометра MPX4115A около 1м). Позже появились дополнительные модули, например GPS для удержания позиции.
Multiwii
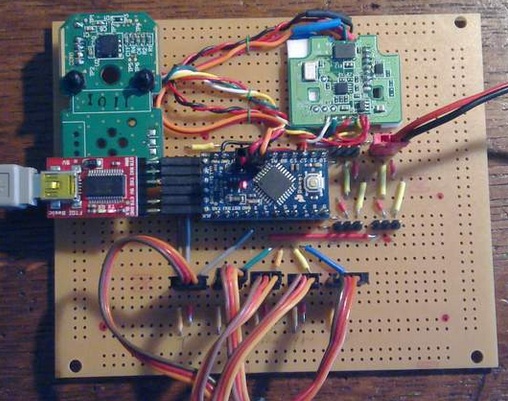
Следующей вехой в развитии коптеров стала система MultiWii. Название пошло от игрового манипулятора Nintendo Wii и Wii Nunchuk, которые умельцы разбирали, и выпиливали оттуда плату с датчиками. В качестве центрального процессора использовалась Arduino Nano.
Внешний вид платы получался примерно такой (фото с сайта rcgroups, 2020 год):
Pixelito
Второй схемой, разрабатываемой параллельно, стала схема с вертикальным влетом моделиста из Бельгии по имени Александр. Он назвал свой вертолет Pixelito. Александр применил в нем схему, отличную от Proxflyer, с одним несущим винтом.
Стабильности ее полёта способствовало специальное устройство на винте: за неимением приемлемых по весу электронных стабилизаторов полета, на винт ставилось массивное навершие, выполнявшее при раскрутке роль гироскопа.
Сверху находится балансир (flybar, Bell/Hiller bar):
Как бы в последствии конструкторы ни пытались, без этой штуки вертолеты с одним винтом летать отказывались. Напомню, что первой вертолетной схеме балансир был не нужен или, может быть, его функцию частично выполняло ограничительное кольцо на лопастях из бальзового дерева.
В этой модели моторчика было тоже два: для основного винта, который позволял лететь вверх-вперед, и для стабилизирующего пропеллера, с помощью которого можно было поворачивать. Модель получилась невероятно маленького размера, о чем можно судить по фото с хомячком, оно 2003 года, так что сорри за качество. Модель весила всего 6,9 грамм.
В 2003 году Александр был уже почти у создания работоспособной модели, и нашел Питера, создателя Proxflyer. Они решили объединить усилия, и таким образом довели свои модели до рабочих прототипов.
В записи от 15 Декабря 2003 года говорится: «Сегодня мы с Питером с удовольствием представляем результат наших последних совместных разработок. Я создал вертолет Pixelito, а Питер — Proxflyer Micron (на тот момент уже не первую модель норвежца — мое примечание).
Pixelito — это вертолет с моей собственной системой контроля ротора, а дизайн Питера уже довольно хорошо известен. Мы называем их роботами, потому что такое название характеризует их лучше всего. Примерно 2 недели назад мы с Питером провели чудесные выходные у меня дома и после этого решили, что было бы неплохо вести совместные исследования, каждый у себя дома, но двигаясь к общей цели.
Видео только что созданного мини-вертолета Pixelito, но в ролике им управляет друг его создателя, автор Proxflyer Peter Muren. Можно догадаться, что Александр держит камеру.
Pixelito, 2003 год.
Третьим прототипом могла бы стать нашумевшая в то же самое время разработка японской фирмы Seiko Epson. Модель могла летать только вверх и вниз.
Rtf (ready to fly)
Летательные аппараты класса RTF (Готов к полету). Эти машины требуют только предварительной настройки компаса и гироскопа. Название RTF прямо заявляет, что в поставку входят все необходимые комплектующие для быстрого запуска. Начинающим пилотам рекомендуется именно эта версия.
Батарея
АКБ – это сердце квадронов, обеспечивающее зарядом винтовые моторы. Они могут иметь моноблочную или многоблочную структуру, от чего во многом зависит их емкость. Аккумуляторные блоки подсоединяются в электроники посредством специальных клемм и устанавливаются на борт в специальных блоках. Для многих моделей предусмотрена возможность замены АКБ на аналогичные или с большей мощностью.
Чтобы понять, можно ли использовать другую батарею, необходимо внимательно почитать описание или инструкцию к агрегату.
Бесколлекторные подвесы (brushless gimbal)
Параллельно с квадрокоптерами, развивалась еще одна очень интересная технология — бесколлекторный подвес для фото/видео камеры. Это отдельная плата со своими датчиками, которая удерживает камеру в нужном положении за счет двух моторов, компенсируя развороты по соответствующим осям. Их разрабатывал наш соотечественник, как работает подвес, можно видеть на видео (2020й год).
Видно что коптер качается, а ось камеры нет.
Сейчас этим уже никого не удивить, а тогда это был настоящий прорыв в качестве видеосъемки.
Бпла и современное законодательство
В настоящее время на законодательном уровне действуют определенные ограничения в контексте применения и использования квадрокоптеров. Например, каждый дрон весом 0,25 – 30 кг подлежит регистрации на территории РФ и подразумевает наличие у пилота полетной лицензии.
К тому же придется получать разрешение на полеты, для которого потребуется удостоверение летной пригодности, доступ к эксплуатации воздушного пространства и удостоверение правомерности БПЛА-пилотирования. Если планируется ведение съемки в определенных регионах, то потребуется также соответствующе разрешение.
Будущее дронов
На что еще способны и для чего нужны людям коптеры, кроме развлечений?
Уже сегодня довольно успешно применяются такие летательные аппаратики для помощи строительным бригадам при монтаже сложных, композиционных конструкций, в сельском хозяйстве, при съемках документальных фильмов формата BBC, и даже для транспортировки людей.
Последний пункт можно считать особо интересной, революционной перспективой в мире БПЛА. Отдельную статью, посвященную таким крупногабаритным беспилотникам вы можете найти на страницах нашего сайта.
Будущее индустрии.
История создания и развития коптеров не ограничивается развлекательными целями и узкоспециализированным применением. В Саудовской Аравии планируется запуск автоматического беспилотного такси на базе летающего дрона. Разрабатываются модели военных машин, используемых как для разведки, так и в боевых действиях.
Поэтому все только начинается 🙂
Если интересует история появления квадрокоптеров, то можно посмотреть еще пару статей на нашем сайте: про историю аэрофотосъемки в России и про ее более поздний период – внедрение аэрофотосъемки в Советском Союзе.
Виды квадрокоптеров
- TriCopter – 3 винта
- QuadCopter – 4 винта
- XCopter – 4 винта в X-образном положении направления полета
- Y4Copter и Y6Copter – 3-х позиционный коптер с допорлнительными винтами, вращающимися в противоположную сторону для большей устойчивости и маневренности
- HexaCopter и OctoCopter – 6-ти и 8-ми винтовые коптеры
- H6Copter – 6 винтов по 3 параллельных пары
- ButterflyCopter и TwinQuadCopter – усложненные конструкции, состоящие из двух независымых винтовых комплексов.
Также квадрокоптеры можно поделить на 3 вида по сборке:
- Полностью готовы к запуску. Покупные устройства уже собраны и готовы к полету. Они удобны тем, что достав мультикоптер из коробки, его можно сразу использовать: он настроен, откалиброван, не смещен центр тяжести.
Устройства бывают разных ценовых категорий. Брендовые аппараты имеют высокую цену. Такие конструкции можно смело назвать «полноценными». Использовать такие устройства уместно для видеосъемки, фото с воздуха. Дорогие брендовые модели оснащены хорошей камерой, GPS-приемником и многим другим.
- Нуждаются в частичной сборке. Такая конструкция практически готова к полету. Обычно это частично собранный аппарат. Иногда некоторые части нужно докупить, укомплектовать и смело пользоваться. Такой комплект обычно стоит дешевле брендового готового устройства.
- Комплект для сборки с нуля. Такая конструкция содержит в себе лишь самые необходимые комплектующие. В комплект не входит камера, передатчик. Управление таким устройством осуществляется с земли.
Виды управления
Для работы с беспилотником чаще всего используется портативный пульт. Эти приборы бывают разных форм и размеров, но они всегда имеют два рычага (стика), которыми задается скорость и направление перемещения БПЛА. Поведение коптера в воздухе можно отрегулировать особыми клавишами пульта – триммерами.
Гоночные коптеры
Завершим раздел кратким описанием гоночных моделей. Аккумулятор таких квадрокоптеров обладает высоким выходным напряжением. Это позволяет оперативно изменять скорость перемещения, делает поведение воздушного гонщика очень мобильным и динамичным. Дальность управляемого полета доходит до 500-1000 м, скоростной предел достигает 100-120 км/ч.
Дальнейшее развитие и перспективы
Благодаря совершенствованию бортовой электроники и использованию модулей GPS, модели научились удерживать свое положение в пространстве и постоянную высоту. На мультикоптеры стали ставить телеуправление, которое по-английски называется FPV — First Person View, вид от первого лица.
Гонки на дронах с управлением с FPV, 2020 год
Позже одна компания при каком-то технологическом институте стала разрабатывать систему автоматисеского контроля роя мультикоптеров и добилась впечатляющих результатов: они не только смогли заставить тучи дронов летать по заданным траекториям, не сталкиваясь.
Голограмма из дронов, 2020 год
Уже в 2020 году построили прототип мультикоптера, способного поднять над землей человека. Сейчас это направление активно развивается. Ведь для перевозки людей здесь есть преимущества перед вертолетами. Это и удобство управления, и более компактные размеры, и электричество в качестве топлива, и безопасность из-за наличия нескольких пропеллеров вместо одного-двух.
Первый мультикоптер с человеком на борту, 2020 год
Устройство дронов продолжает совершенствоваться, для них появляется все больше сфер применения. Мультикоптеры совершенствуют многие авиапроизводители, включая Boeing. Да что там Boeing — сама Почта России уже во всю экспериментирует с доставкой грузов по воздуху. Полет на квадрокоптере с видом от первого лица, от которого захватывает дух, 2020 год.
Возможно, скоро нас ждут аэротакси, огромные пространственные трехмерные скульптуры из дронов на любом большом празднике, доставка посылок и корреспонденции вне зависимости от того, где вы находитесь, а пиццы — всего лишь за три минуты!
Датчики обнаружения препятствий
Облет препятствий поддерживается набором оптических камер и ультразвуковых сонаров, которые обнаруживают помехи на дистанции до 20-30 м. Высота полета также контролируется оптикой и инфракрасным датчиком.
Блок OSD формирует и передает всю телеметрическую информацию, которая поступает на экран ПДУ и демонстрируется поверх основного изображения.
Для новичков
Процесс обучения сопровождается множеством аварий, поэтому первый коптер новичка должна обладать достаточно крепким корпусом, способным выдержать падения и удары. Будет огромным плюсом, если она сможет летать в помещении (без влияния погодных условий).
Приветствуется и щадящая стоимость такой машины – несколько десятков долларов. Моторы – коллекторные. Хорошо, если дрон обладает двойными расходами и в старшем режиме может выполнять воздушную акробатику. Это позволит не покупать новый дрон после приобретения пилотом начальных знаний.
Полетной дальности в 30-50 метров вполне хватит. Аккумуляторная батарея должна обеспечивать 8-10 минут пребывания в воздухе. Мы посоветуем выбрать в качестве стартовой модели складной Eachine E58 или мини коптер – JJRC H8 Mini.
Если сомневаешься — ставь больше пропеллеров!
Почти сразу после появления моделей вертолетов появились попытки создания многопропеллерных, если можно так выразиться, машин.
Чем больше пропеллеров было в модели, тем труднее было согласовывать их работу. Тот же вертолет Chinook с картинки выше, без гироскопа колбасило при полете так, что становилось сомнительным применение двух пар винтов. Для полета же моделей с тремя и более количеством двигателей требовалась электроника, на порядок сложнее вертолетной.
Поначалу стали экспериментировать с количеством электромоторов. Это сейчас почти всегда ставится знак равенства между дроном и квадрокоптером, но на заре их появления было совсем не так.
Изначально многомоторные модели собирали исключительно энтузиасты. Почти сразу же возникла идея ставить на модели компактные камеры, которых в то время было не много, а GoPro появилась уже позже, и удачно вписалась в тренд. Камеры собирали из собственноручно припаянных контроллеров к камерам от мобильных телефонов и так далее.
Конструкторы мультикоптеров подбирали материалы для их рам, экспериментировали с разными электродвигателями, стали собирать различные модули для согласованного управления пропеллерами и гироскопы, писать для этого ПО и обмениваться удачными находками друг с другом. Получалось с переменным успехом.
Пока не было надежной электроники для согласования моторов, смотреть на полеты таких устройств жутковато. Здесь были и поломанные рамы, и потерянные видеокамеры, и утонувшие в водоемах дорогостоящие электронные модули. Однако год от года стабильность, дальность полета, простота управления и качество снимаемых видео постоянно возрастали.
Один из первых трикоптеров, 2020 год
И вот, после долгих экспериментов, модели стали уже летать стабильно. Можно было не бояться, что она завалится на бок при полете или что вибрация при полете будет мешать управлению. Поначалу все ставили себе столько пропеллеров, сколько хотели, но позже каждой схеме, все же, нашлось свое применение.
Пролет квадрокоптера с камерой GoPro Hero 3 на борту через фейерверк, лучше смотреть в HD, 2020 год
Машины с тремя и четырьмя моторами стали чаще применяться для развлекательных полетов, для съемки видео, а увеличенное число пропеллеров пригодилось в коптерах для перевозки грузов, а также в тех случаях, когда от мультикоптера требуется надежность. Ведь если при отказе одного из моторов в модели вертолета неизбежно происходит его крушение, то в случае моделей с несколькими двигателями нагрузку вышедшего из строя мотора можно распределить на другие и удержать машину в воздухе.
Октакоптер, специально предназначенный для перевозки грузов, 2020 год
За и против
Плюсы четырехвинтового мультикоптера:
- Эксплуатация недорогая. Даже при поломке запчасти легко подобрать в магазине и заменить.
- Полет очень стабильный.
- Емкий аккумулятор. Хорошая батарея обеспечивает длительную работу устройства, возможность перемещать небольшие грузы и производить длительную видеосъемку.
Единственный недостаток – цена. Существуют и бюджетные модели, но качество материалов не всегда самое хорошее. К тому же на нем установлено лишь самое необходимое. Если вам нужен квадрокоптер для профессионального использования, придется выложить немалую сумму.
Законодательство
Все полеты в РФ регулируются двумя документами – Воздушным кодексом и Федеральными правилами использования воздушного пространства. Законы говорят так:
- для полетов над скоплениями людей требуется особое разрешение;
- над закрытыми объектами летать запрещено;
- нельзя подниматься выше 150 метров.
https://www.youtube.com/watch?v=TCBUyYvcTXk
Если квадрокоптер весит 30 кг и более, он подлежит обязательной регистрации. БПЛА меньшего веса должны управляться лицензированными пилотами, получившими разрешение на полеты от местных органов власти. Это же касается и видеосъемок в населенных пунктах. В пограничных районах (полоса в 25 км) допуск выдается органами ФСБ.
Лихачи наказываются штрафом в несколько тысяч рублей. Если внешний пилот нанесет своим дроном существенный материальный ущерб или травмирует людей, то за такие действия он может сесть в тюрьму. Подробная статья, которую мы обновляем, о регистрации дронов в РФ здесь.
Зачем и для чего нужен
Предназначение современного беспилотника очень широко и разнообразно. Он находит свое приложение в целом ряде областей, связанных как с получением удовольствия, так и с работой:
- воздушные гонки и развлечения;
- профессиональная видеосъемка;
- видеонаблюдение и охрана объектов;
- спасательные операции;
- археология и картография;
- сельское хозяйство;
- охота и рыбалка;
- доставка небольших грузов.
В последние годы лучшие квадрокоптеры нацелены на решение множества нестандартных производственных задач. Чаще всего их применяют там, где присутствие людей нежелательно или опасно – в шахтах и карьерах, при осмотре трубопроводов и высотных сооружений, в вулканических кратерах, при изучении погодных явлений и пр. У нас есть целый раздел, посвященный таким моделям. Для таких целей нужен квадрокоптер с камерой.
Из чего состоит
На нашем сайте есть отдельная статья, посвященная этому вопросу. В данном разделе мы только перечислим составные части БПЛА и немного опишем присущие им задачи.
В конструкцию входят:
- рама – на ней монтируются все узлы;
- контроллер (бортовой компьютер) – обрабатывает информацию, поступающую от прочих компонентов дрона, и отдает команды его силовым элементам;
- электронные регуляторы скорости (ESC) – формируют управляющий ток для каждого движка;
- электродвигатели – входят в силовую установку. На машины бюджетного класса ставятся дешевые коллекторные моторы. Тяжелые и совершенные модели используют довольно дорогие бесколлекторные моторы;
- пропеллеры – своим вращением создают подъемную силу. Самые расходные детали БПЛА;
- приемник – воспринимает радиосигналы от пульта управления и транслирует их в бортовой компьютер;
- аккумулятор – для всех элементов он является единственным источником питания.
У нас имеется инструкция, которая расскажет, из чего и как собрать квадрокоптер самостоятельно.
История
В целом вертолеты с несколькими винтами разрабатывали еще в начале вертолетостроения. Попыток создать многовинтовой вертолет было много, но первый квадрокоптер, который смог взлететь и держался в воздухе, был разработан Георгием Александровичем Ботезатом (русско-американский конструктор). Испытания конструкции проходили в 1922 году.
У первых аппаратов был один недостаток: вращение мотора передавалось сразу на 4 винта. После того как был создан автомат перекоса и хвостовой винт разработка и испытания квадрокоптеров завершились. В 1950-х годах начали проводиться новые разработки, но успехов достигнуть так и не удалось.
XXI век изменил все. Квадрокоптеры получили новую жизнь, но аппараты были созданы для беспилотного использования. Конструкция квадрокоптера отличается простотой, поэтому нередко этот аппарат используют любители для моделирования. На квадрокоптеры обычно устанавливают камеру, но она не мешает устройству работать и летать, так как располагается вдалеке от зоны работы винтов. Четырехвинтовой мультикоптер может использоваться для малозатратной киносъемки и фото с воздуха.
Как летает квадрокоптер
Принципы работы
На беспилотник устанавливаются 4 электромотора и столько же воздушных винтов. Два диагональных пропеллера вращаются по часовой стрелке (CW), два других (CCW) – против. Интенсивность вращения и подъемная сила определяют скорость и направление перемещения нашего дрона.
Если два правых двигателя будут крутиться быстрее, чем левые, они наклонят и погонят машину влево. В противном случае все произойдет наоборот. Если задние винты разогнать сильнее передних, дрон клюнет и полетит вперед. Если будет иначе, голова машины приподнимется.
Маневры относительно вертикальной оси выполняются одновременным ускорением пропеллеров CW с соответствующим замедлением винтов CCW. Повороты в противоположном направлении требует разгона группы CCW и торможения CW. Равномерное вращение заставит дрон взлететь или опуститься.
Главным электронным компонентом является полетный контроллер. Он реагирует на все поступающие через приемник команды и отдает распоряжения блокам ESC, которые определяет тягу и интенсивность вращения двигателей. Стабильность поддерживается показаниями гироскопа, измеряющего углы тангажа, крена и рыскания.
Как летает квадрокоптер?
Чтобы понимать суть технических решений, разберемся немного как вообще квадрокоптер летает. По сути, квадрокоптер — это неустойчивая система. Если взять 4 мотора, и просто подключить их к батарейке, квадрокоптер никуда не полетит, он просто перевернется т.к. сила тяги моторов никогда не будет идентичной.
И тут вступает в действие электроника. На борту квадрокоптера есть центральная «плата управления», ключевой частью которой является блок датчиков. В простейшем случае, это трехосевой гироскоп. Микроконтроллер постоянно считывает данные с гироскопов, и как только гироскоп «чувствует» наклон по какой-либо оси, контроллер дает соответствующему двигателю команду чуть-чуть увеличить или уменьшить обороты, чтобы компенсировать наклон.
В общем-то и вся логика — за исключением кучи всего (ПИД-регуляторов, теории управления, фильтров Калмана), ничего сложного тут нет (шутка). Ну а для пользователя все действительно прозрачно. Никаких движущихся частей кроме моторов, в квадрокоптере нет, все управление происходит исключительно изменением вращения оборотов моторов (с поворотами аналогично — изменяем скорости вращения, получаем вращающий момент). А теперь вернемся к истории.
Осторожно, траффик.
Коммерческие системы
Про них писать не так интересно, т.к. принцип здесь простой, «заплати и лети». Первым был вышеупомянутый MicroKopter, следующей (и не очень удачной) попыткой был XAircraft, в бюджетном секторе были популярны аппараты марки Gaui (это был первый бюджетный аппарат ценой около 400$ за готовый коптер).
И наконец, самой успешной компанией является DJI, про которую не писал только ленивый, так что повторяться здесь смысла нет. Они вышли на рынок с контроллерами DJI Naza (ценой 200-400$, с возможностью удержания позиции, возврата домой), была отдельная профессиональная серия DJI Wookong (ценой около 1000$ и большей стабильностью полета). Наконец, DJI вышла на рынок устройств готовых к полету (RTF, Ready To Fly), ну про них уже все знают.
И последние видео.
Первый бюджетный квадрокоптер Gaui 330. Цена вопроса 400$, 2020 год, никаких доп.функций.
Dji Naza v2, цена вопроса те же 400$, возможность удержания позиции, возврата домой, полета любой стороной к пилоту (режим carefree).
Dji Phantom 3 — со встроенным подвесом камеры, управлением со смартфона и прочими плюшками.
На этом пока все, sorry за большое количество видео, но без них никак, иначе было бы неинтересно. Посмотрим что будет дальше, лет через 5…
Кто придумал и изобрел
Первые разработки квадрокоптеров велись еще в 1900 годах. Американец Георгий Александрович Ботезат сконструировал машину с четырьмя винтами, приводящимися одним двигателем. В ходе испытаний квадрокоптер поднялся в воздух, пролетев 1 км, с высотой до 15 метров. Но к сожалению из за ряда проблем, разработки были прикрыты.
Первый современный квадрокоптер был разработан в 2006 году. Эту машину представила немецкая фирма MikroKopter. Дрон комплектовался микроконтроллером, который анализировал информацию, поступающую от гироскопа, акселерометра и барометра. Чуть позже появился и GPS модуль.
БПЛА был ориентирован на профессионалов, стоил дорого, но открытое программное обеспечение привело к появлению на рынке дешевых клонов. Это сказалось на доходах компании. Код закрыли, но было поздно. Модель побудила прочих производителей электроники разрабатывать гражданские дроны различного размера и класса.
С появлением прочных и легких полимеров, небольших электродвигателей, а особенно с потрясающими достижениями в области микроэлектроники, стало возможным создание надежных и эффективных беспилотных мультироторных систем.
Кто придумал?
История создания/разработки таких БПЛА уходит корнями в первую половину прошлого века. Первый действующий прототип всех действующих ныне любительских и профессиональных дронов, а также вертолетов появился в 1922 году и получил название «вертолет Ботезата».
Георгий Александрович Ботезат – тот, кто придумал квадрон, был гражданином США российского происхождения, изобретателем, естествоиспытателем и профессором Петроградского института высоких технологий.
Разработки первого в мире квадрона под его началом велись при финансовой поддержке армии США. Военным требовался летательный аппарат, который сможет производить вертикальные взлеты и посадки. Со временем проект был прикрыт из-за определенных технических трудностей.
Основная проблема состояла в обязательном наличии попутного ветра для полетов. Ученый так и не успел довести разработку и оптимизацию схемы вращения двигателей до конца.
Летающий “автомобиль” для армии сша.
Еще одним удачным изобретением можно считать модель VZ-7, разработанный фирмой Сurtiss-Wright,В1958 году в ходе испытательных полетов он заявил о себе как стабильно работающий и хорошо управляемый, но американская армия не приняла его к эксплуатации из-за слишком маленького количества функциональных опций.
На данном этапе все работы по конструированию и усовершенствованию квадрокоптеров были заморожены, и решение продолжить развитие этой темы возникло спустя половину века, только в новом тысячелетии.
Спустя пятьдесят лет с момента пробных полетов первых квадролетов, интерес к этой теме возобновился, поскольку появились благоприятные для этого условия:
• появились прочные и легкие полимерные материалы, позволяющие значительно снизить вес аппарата
• развитие микроэлектроники помогло устройству управления аппаратов с винтами стать более удобным и стабильным.
Лидеры -китайские компании
Первой из них является корпорация DJI Technology Co, продукция которой отличается высочайшим качеством и возможностями. Нельзя не назвать компанию Walkera, известную своими гоночными моделями. Под брендом Syma выпускается широкий спектр бюджетных машин. Zerotech производит удачный селфи дрон Dobby. Eachine E016H Mini является лучшей миниатюрной моделью.
Лучшие характеристики современных квадрокоптеров

Грузоподъемность зависит от соотношения силы, создаваемой винтомоторной группой, и собственного веса машины. Отличные показатели имеют относительно большие квадрокоптеры. Например, характеристики Phantom 4 позволяют использовать эту модель для доставки посылок потребителям.
Любительские модели
В последние годы появилось огромное число полноценных летательных аппаратов любительского класса. Как правило, видеокамеры таких машин обладают разрешением не ниже 720P и хорошо стабилизированы. Предел трансляции живого видео и полетная дальность доходит до 1 км.
Морфологические и синтаксические свойства[править]
квад-ро-ко́п-тер
Существительное, неодушевлённое, мужской род, 2-е склонение (тип склонения 1a по классификации А. А. Зализняка).
Корень: -квадрокоптер-.
Мотор
Большая часть любительских мультикоптеров оснащена двумя типами электродвигателей – коллекторными и бесколлекторными. Как правило, вторые используются в бюджетных, любительских и наиболее простых вариантах. Их мощности вполне достаточно для поднятия в воздух мало и средне весовых квадронов любительского класса.
Коллекторные двигатели имеют другую, более совершенную конструкцию и несколько иной принцип работы. Они лишены коллекторов и щеток. Магнитные элементы расположены вокруг вала и выполняют непосредственно роторную функцию. Таким образом, двигатель работает с более плавным контролем оборотов у винтов и с большей отдачей, что обеспечивает лучшую тягу, энергорасход и производительность.
Мультикоптеры
Мультикоптер – это альтернативный, вариант квадронов, превосходящий их по количеству моторов. Его несущие винты вращаются диагонально и в противоположных по отношению друг к другу направлениях.
Различаются мультикоптеры между собой количеством моторов. В современной практике помимо трех- и четырехвинтовых моделей встречаются гексакоптеры и октокопторы с 6- и 8-ю пропеллерами, соответственно. Количество винтовых элементов по большому счету определяет возможности пиковых нагрузок аппарата по массе, то есть то, сколько веса он сможет взять с собой на борт.
Наличие камер высокого формата
В состав всех современных дронов входит установленная на носовом или донном стабилизированном подвесе камера формата 4K или Full HD. Она используется не только с целью получения красивого видео и фото, но и для полетов в режиме FPV.
Особенности
Строение коптера предполагает установку 4-х моторов и такого же числа пропеллеров. Этим он отличается от прочих мультикоптеров – гексакоптеров и октокоптеров (модели с 6 и 8 лучами и воздушными винтами).
Два двигателя вращаются по часовой стрелке (CW), а вторая пара – против (CCW). Такая комбинация призвана компенсировать вращательный момент и обеспечить текущую стабильность.
Относительная дешевизна компонентов, надежность и малые размеры – вот основные достоинства лучших современных коптеров. Они обладают отличной маневренностью и высокой грузоподъемностью, которой хватает на перенос трехосевого стабилизированного подвеса и полетной камеры.
Стоит отметить и прекрасную ремонтопригодность таких машин. Дрон легко разбирается, а практически все запчасти можно заказать в магазинах.
Первые коммерческие дроны для аэросъемки.
В таком виде, какие они есть сейчас коптеры стали выглядеть в 2006 г, это были модели производства Германии компании MikroKopter. Они имели ряд усовершенствований и опций, позволяющих достичь стабильности при полете, фиксации позиции и предназначались для профессионального использования.
Усовершенствование системы стабилизированной подвески позволило устанавливать на коптер фото- и видеокамеру, чтобы при этом присоединенное оборудование находилось в строгой фиксации, способствовало тому, что дроны начали массово и повсеместно продаваться.
Помимо этого, такой апгрейд значительно увеличил качественные характеристики аэросъемки с коптеров, и именно благодаря этой технологии они сегодня широко применяются в рекламных съёмках, киносъемках, военных разработках и прочих сферах.
Далее развитие темы дронов с четырьмя винтами имело два пути:• изготовление полноценных устройств для видеосьемки – от недорогих игрушек до платформ для видеосъемки и других профессиональных сфер. Обычно, в комплекте идет аппарат и собственная линейка микроконтроллеров и программного обеспечения к ним.
• отдельное производство микроконтроллеров и программного обеспечения для них, которые можно адаптировать к самодельным или приобретенным в магазине коптерам, что дает возможность всем любителям моделирования дронов, самостоятельно сконструировать свой вариант системы.
Платы управления и полетный контроллер
Контроллерная плата – мозг любого дрона. Она отвечает за все бортовые программные функции, включая контроль оборотов двигателей, съемку интегрированной камерой, позиционирование в пространстве на основе GPS-координат, работу светодиодов, выполнение виражей, прием различных сигналов с ДПУ и многое другое.
Подвес с камерой
Это важная часть любых мультикоптеров с функцией съемки. Подвесное крепление служит для соединения видеокамеры с корпусом аппаратика. Она может иметь несколько осей (обычно две или три), позволяющих вращать камеру для захвата изображения в различных направлениях.
Нередко подвес оснащается специальными демпферными подушками, которые призваны гасить вибрации и обеспечить качественную стабилизацию видео на аппаратном уровне.
Предпосылки к появлению электрического вертикального взлета
Еще пятнадцать лет назад в небе среди компактных летающих устройств можно было наблюдать только самолеты и вертолеты с двигателями внутреннего сгорания. И во всем мире, и в СССР основой авиамоделизма неизменно выступали самолеты. Это были кордовые, неуправляемые и радиоуправляемые модели.
Конкурс радиоуправляемых вертолетов 1982 года в СССР
У моделей самолетов с авиадвигателями, работающими не на топливе, а от электричества, дело обстояло получше, но для вертолетостроения электромоторы на протяжении более ста пятидесяти лет, с самого момента их появления, были абсолютно непригодны. Вертолеты на видео 1982 года тоже имеют ДВС-двигатели.
Однако время не стоит на месте, и постепенно появились две необходимые для подъемной электротяги вещи. Во-первых, появились малогабаритные, а также и бесщеточные, или вентильные, электромоторы.
Дело в том, что до их появления никакие электродвигатели не давали такой мощности, которая была бы достаточной для подъема нужного веса при приемлемой собственной массе. Поэтому электрические моторы можно было применять в автомобилях, трамваях и метро, с их помощью можно было бриться, перемалывать пищу и качать воду.
Можно было даже исхитриться и добавить к ним крылья, поставив их на самолет. Однако, первые электродвигатели в самолетах непременно проигрывали по ДВС по всем параметрам. Правда, не все электромоторы нового поколения изначально предназначались для авиации, сейчас мы об этом поговорим.
Рыбак-вертолетчик, 2020 г. Модель с ДВС
А во-вторых, появились компактные и ёмкие аккумуляторы, чему, скорее всего, значительно поспособствовало развитие мобильной электроники. Например, стали производиться литий-полимерные и литий-ионные аккумуляторы, которые пришли на смену на смену никель-кадмиевым и никель-металлогидридным.
Самые первые аккумуляторы не были легкими и компактными, а поднять такой в воздух не представлялось возможным. Поначалу их пытались применять и в автомобилях, но появился двигатель внутреннего сгорания и на тот момент быстро поставил точку в развитии электротромобилей. Современные же литий-полимерные аккумуляторы позволили получить бо́льшую ёмкость на единицу массы.
Принцип работы квадрокоптера
Четырехвинтовое устройство оборудовано 4 винтами постоянного шага. Такой мультикоптер отличается от одно- и двухвинтового тем, что автомата перекоса у него нет. У каждого пропеллера есть свой двигатель, приводящий устройство в движение.
Всего у четырехвинтового мультикоптера 4 двигателя, каждый из которых имеет собственное зарядное устройство (аккумулятор). 2 винта осуществляют вращение против часовой стрелки, 2 пропеллера – в обратном направлении. Благодаря такой работе основных винтов, мультикоптер не нуждается в хвостовом винте.
Маневрирование квадрокоптера осуществляется путем регулирования скорости пропеллеров и происходит таким образом:
- подъем устройства происходит путем ускорения всех четырех винтов;
- движение конструкции в сторону происходит, когда с одной стороны увеличивается скорость вращения пропеллеров, а с другой замедляется;
- поворот устройства — вращающиеся против часовой стрелки пропеллеры ускоряются, а те, что движутся по часовой стрелке, замедляются.
Профессиональные
Лучшие профессиональные дроны обладают массой полетных режимов. На помощь пилоту приходит и спутниковая навигация, определяющая положение коптера с сантиметровой точностью. ВМГ комплектуется БК электродвигателями и крупными пропеллерами. Съемка ведется полетной камерой формата 4K.
Изображение записывается на карту памяти или в режиме FPV передается на несколько километров. Аппаратура управления поддерживает 2 частотных диапазона – 2,4 и 5,8 ГГц. Система безопасности представлена всеми типами датчиков – оптическими, инфракрасными и ультрафиолетовыми.
Пульт со смартфоном
Если дрон оснащен полетной камерой, то на держатель ПДУ устанавливается мобильное устройство, отображающий всю воздушную обстановку. Чаще всего такая комбинация используется при полетах в режиме FPV.
Радиус полета
Радиус полета определяется устойчивостью системы связи, емкостью бортовой батареи и избранного пилотом режима перемещения. Дальность лучших моделей компании DJI (в идеальных погодных условиях) составляет 5-7 км.
Развитие электрического вертолетостроения
С появлением летающих прототипов идею подхватили и другие производители игрушек, и, используя новые двигатели, аккумуляторы и подобрав более современный и легкий пластик, стали производить модели вертолетов одну за другой, сначала по норвежской схеме, ну а потом и по подобию Pixelito, по-моему, первые серийные модели так и назывались — Pixelito.
Вертолет одной из первых моделей по схеме, аналогичной Proxflyer, фирма Syma, 2007 год
Также одна из первых моделей английской фирмы Fastek Computers, 2007 год
Поначалу вертолеты были, в основном, соосные. Одним из самых плодовитых на тот момент производителей игрушечных радиоуправляемых вертолетов была китайская компания Syma. Авиамоделисты из всех стран также вовсю пробовали разные варианты построек моделей с вертикальным взлетом, и некоторые их достижения были довольно-таки выдающимися, но то, что быстрее всего дошло до конечного потребителя — это продукция фирм-производителей игрушек.
Одна из первых моделей по схеме Pixelito, 2-канальная, лишь с балансиром, 2008 год
В результате как норвежский, так и бельгийский моделисты неплохо заработали на продаже прав на производство вертолетов на дистанционном управлении, сделанных по их схемам. В последствии разработками Питера заинтересовались DARPA и норвежское Министерство Обороны, инженер создал свою фирму Prox Dynamics и стал разрабатывать вертолет-шпион для военных целей.
Что сейчас там происходит и на какой стадии находится производство, неизвестно.
Регуляторы оборотов
Регуляторы оборотов или контроллеры скорости полета отвечают за контроль мощности двигателей. Суммарный рабочий ток этих элементов должен превышать по своим показателям максимальный ток электромоторов. Среди основных параметров, о которых нужно знать, подбирая оборотные регуляторы самостоятельно, стоит отметить максимальный рабочий ток и диапазон рабочих напряжений.
Семантические свойства[править]
- авиац.беспилотныйлетательный аппарат с четырьмя несущими винтами, вращающимися диагонально в противоположных направлениях ◆ Квадрокоптер при отказе одного из двигателей полностью неспособен к полёту… «Квадрокоптер»(цитата из Википедии, см. Список литературы)
- квадролёт, тетракоптер, частичн.: дрон
- —
- мультикоптер, летательный аппарат, дрон, беспилотник
- —
Сложности в управлении
Новичок на этапе обучения может столкнуться с некоторыми трудностями контроля. В основном они связаны с пространственной ориентацией аппаратика и координацией движений стиков, что, надо сказать, по началу действительно очень непривычно.
Однако для таких случаев многие производители (в частности бюджетных модификаций) предусмотрели такую полезную функцию, как Headless Mode. Она меняет ориентацию дрона таким образом, что пилоту не нужно задумываться о том, где у квадрона зад, а где перед.
Смартфон без пду
Смартфон и особое приложение позволяют вообще отказаться от пульта. В этом случае связь поддерживается по каналу WiFi. Экран мобильного устройства показывает живое видео, поступающее с бортовой камеры. На его фоне рисуются виртуальные стики и мнемонические изображения команд.
Только пульт
В данном случае, пульт имеет свой встроенный экран. Всю телеметрию вы можете считать без применения смартфона. Такой вариант присущ дорогим моделям.
Трансмиттер и пульт управления
Трансмиттер, то есть передатчик сигнала или пульт управления – это основной контрольный элемент любого квадрика. Контроль осуществляется посредством радиоволн, излучаемых аппаратурой на определенной частоте (как правило, это 2,4ГГц для радиосигнала и 5,8 для AV-видеосигнала с большим радиусом покрытия).
Улучшения и повышение стабилизации полета
В то время как первые игрушечные вертолеты имели всего 2 канала управления (вперед-вверх и поворот лишь в одну сторону), любители для себя делали и модели на многоканальном радиоуправлении. Чтобы управлять самыми первыми моделями дистанционно управляемых вертолетов, требовалась довольно долгая тренировка, поскольку ровно удержать его в воздухе было довольно трудно, и многое зависело от мастерства пилота.
Для самых простых игрушечных вертолетов вместо радиоуправления применялось управление по инфракрасному излучению. В более продвинутых моделях — по радиоканалу. В дешевых моделях оно было двухканальным, чем дороже — тем каналов управления становилось больше.
Обратите внимание, как трудно пилоту совладать с удержанием модели на месте:
Одна из первых моделей вертолетов, 2007 год.
Появление миниатюрных гироскопов значительно улучшило эту ситуацию. После добавления в модель этого устройства полет становился прямо непривычно стабилен, не надо было постоянно держать пальцы на клавишах управления. Однако такие модели стоили гораздо дороже, чем вертолеты без гироскопа.
Видео про модели вертолетов с гироскопами, 2020 год
Самой популярной из моделей с гироскопом для массового покупателя была модель Syma S107, ну а самыми надежными, выдерживавшими прямые столкновения со стенами, зубы котов и бесконечные тараны мебели, наверное, являлись вертолетики фирмы Himoto. Гироскопы стали применяться и в моделях вертолетов с ДВС:
На видео трюки выполняет вертолет с гироскопом и ДВС, 2020 год.
Устройство и принцип работы
Принцип действия современных коптеров предельно прост. Каждый несущий винт приводится в движение электромотором. Одна часть двигателей вращается по часовой стрелке, а вторая – против. Это позволило исключить из конструкции квада хвостовой винт и сложный в плане конструктивной реализации автомат перекоса.
Устройство квадрокоптера
В квадрокоптере 4 винта, каждый из которых работает от собственного двигателя. Все винты работают целостно. Контролировать работу устройства получается благодаря микропроцессорной системе. Команды радиоуправления передаются на устройство и системой переводятся в команды каждому двигателю.
В некоторых случаях на аппарат могут быть установлены акселерометр (позволяет зафиксировать устройство в горизонтальном положении) и бародатчик (помогает установить аппарат на нужной высоте). Для удержания небольшой высоты и посадки в автоматическом режиме, может использоваться сонар.
Он помогает облетать препятствия. На четырехвинтовой мультикоптер устанавливают приемник GPS. Он позволяет заранее записать с компьютера маршрут, по которому устройство будет лететь. Если связь с управляющим будет потеряна GPS-приемник помогает вернуть квадрокоптер к месту старта.
В зависимости от расположения двигателей, устройства делятся на 2 вида:
- Крестообразный. У мультикоптеров этого вида двигатели размещены так: по одному двигателю спереди, сзади и по бокам.
- В виде буквы «Х». В таких устройствах 2 пропеллера находится спереди, 2 сзади. Вместе они напоминают букву «Х».
Цены на квадрокоптеры в 2020 году
Стоимость простейших дронов невысока – около US $20. Небольшой летательный аппарат с камерой обойдется покупателю в 100-150 долларов. Исключением из правил является DJI Spark, цена которого на сайте производителя составляет US $399.
Складные селфи дроны известных моделей стоят порядка US $150. Их клоны продаются значительно дешевле.
Цены на лучшие машины DJI для рядового российского покупателя почти недоступны. Mavic 2 Pro и Phantom 4 Pro V2.0 продаются за US $1499. Там же можно купить и Mavic Air. Он стоит US $799.