

- Finn mcmissile, переделка под пропорциональное радиоуправление.
- Выбор полетного контроллера
- Монтаж приемника
- Немного теории
- Обзор микроконтроллеров stm32 от st
- Особенности законодательства в области использования бпла
- Особенности построения контроллеров электродвигателей на базе компонентов от st
- Питание и контроллеры питания
- Полезные видео о том, как собрать квадрокоптер своими руками
- Прошивка регуляторов оборотов в blhelisuite
- Список радиоэлементов
- Схема приемника
- Шаг №3. скетч для arduino
- Электроника и модуль питания
Finn mcmissile, переделка под пропорциональное радиоуправление.
Первое, что сделал – это осмотр, того что осталось. Механика вся в норме, електронику в ящик с деталями. Разобрал, почистил основные нужные узлы. Все лишние прибамбасы и пушки удалил. Сделал просто полукопию со светом.






Это то что было..
Начинаем с перекраски кузова. Как оказалось краску нужно сошлифовать до пластика, иначе не ложиться поверх. Счистил, покрыл грунтом, потом уже поверх основным цветом.


Слегка приукрасил фольгой-скотчем

В радиомагазине купил колиматоры с рифлением под светодиоды. Очень похожи на ностоящие фары. Правда по диаметру пришлось немного обточить под посадочные места в кузове. Основной свет- белые 5мм светодиоды, повороты передние и задние, стопы,задний ход – 3мм , боковые передние прямоуголные.


так заметно веселее облик 🙂
Переходим к управлению. На повороты поставил микросерву, максимально использовав родные узлы подвески



В днище увеличил вырезы под колеса для бОльшего выворота колес
Проверка
работает.
На приводе оставил родной моторчик, добавил только самодельный регулятор с реверсом.

Теперь установив светодиоды по штатным местам и сделав проводку, проверяем



Монтаж платы управления освещением (она самодельная на аттини2313), управление огнями стандартное, минимальное: повороты (канал руль), стоп/задний ход(канал газа), фары отдельный канал, простой более 10 сек – включается аварийка. Есть еще несколько дополнительных каналов и функций, но они тут пока не реализованы. Возможно будет время -добавлю звук мотор и сигнал. Радиоуправление тоже самодельное.
ННу и финальная проверка
Остались еще мелочи по доводке, но то уже в процессе, со временем.
Выбор полетного контроллера
Так как мне нужно транслировать видео и телеметрию через интернет, то сразу приходит на ум поставить на дрон микрокомпьютер с 4G модемом и камерой, и сделать из этого комплекта web-трансляцию. Нашлись вот такие решения:
. Это обычные одноплатники с внешним USB 4G модемом и камерой. Для кодирования и трансляции видео используется
. Но эти штуки сами по себе дроном управлять не умеют, их нужно использовать совместно с полетным контроллером.
Полетный контроллер — это мозг дрона. Он следит за состоянием датчиков положения (гироскоп, акселерометр, компас), GPS-координатами, положением ручек на пульте управления и, исходя из этих данных, управляет моторами, чтобы висеть в одной точке или куда-то лететь.
Полетный контроллер нужно будет как-то связать с бортовым компьютером, чтобы можно было загрузить полетное задание или указать произвольную точку куда лететь и когда включать камеру. В продаже можно найти много разных контроллеров сильно отличающихся друг от друга по цене и функционалу.
С Ardupilot я игрался еще на 8-битных атмегах, в которых не было USB-bootloader’а, а прошивались они на программаторе. С тех пор с ним не сталкивался и был приятно удивлен, когда узнал, что сейчас он может работать на 64-битных компьютерах с Linux, у него огромное сообщество пользователей как хобби, так и профи, длинный список поддерживаемых “из коробки” датчиков и расписанные планы на 2023-2023 годы. За это время он успел перерасти в проект DroneCode, а потом и отсоединиться от него.
На первый взгляд в нем как раз реализованы все необходимые функции: автоматический взлет и посадка, загрузка полетных заданий, есть desktop и мобильные приложения под все основные семейства ОС. Программы управления (GCS — Ground Control Station) общаются с бортовым контроллером короткими сообщениями по открытому протоколу MAVLink через комплект радиомодемов (дрон шлет телеметрию, GCS шлет команды управления). Подозреваю, что эти сообщения получится пустить через интернет.
Взглянем на список поддерживаемых контроллеров и что-нибудь подберем. Вариантов там полтора десятка от мала до велика и с разными характеристиками.
Из всего того многообразия контроллеров мне понравилось несколько вариантов:
Самый легкий комплект (84 г) получается из микрокомпьютера
(9 г), контроллера
(15 г), родного внешнего GNSS модуля (46 г) и дополнительного
(14 г).

Рабочий процессор в этом комплекте один — на Raspberry Pi. На нем висит управление ШИМ регуляторов моторов, считывание показаний датчиков, ОС Linux со всеми потрохами и декодирование видео с камеры. Так как в Pi Zero не предусмотрены USB порты, то в этом варианте приходится использовать внешний концентратор. IMU датчики и вход питания без резервирования.
Следующий комплект (97 г) от гонконгской компании с русскими фамилиями в команде разработчиков — контроллер Emlid Edge (59 г) с GNSS модулем (38 г). GNSS модуль работает по протоколу UAVCAN и дополнительно оснащен магнитометром и датчиком воздушного давления. За ШИМ здесь отвечает отдельный процессор ARM Cortex-M3, ОС Linux крутится на основном ARM Cortex-A53 quad-core.
В контроллере имеется HDMI видеовход, что позволяет подключить к нему напрямую любую камеру с таким выходом, например GoPro 4 или 5. Относительно высокая стоимость объясняется дальнобойными wifi-приемопередатчиками в комплекте (до 2 км с трансляцией HD-видео).
Следующий вариант (98 г) состоит из знаменитого микрокомпьютера Raspberry Pi 3 (45 г) с контроллером-шилдом Navio 2 (23 г) от той же Emlid и внешней GNSS-антенны (30 г). На контроллере стоит отдельный процессор Cortex-M3 для управления ШИМ на 14 каналах и расшифровки входящих SBUS и PPM сигналов от приемника. Он, в свою очередь, управляется через драйвер в ядре ОС Linux, которая крутится на Raspberry.
Контроллер оснащен парой раздельных IMU датчиков (акселерометр, гироскоп, магнитометр) MPU9250 и LSM9DS1, одним датчиком воздушного давления и GNSS-модулем U-blox NEO-M8N, который видит GPS, Глонасс и BeiDou с внешней антенной через разъем MCX.
Монтаж приемника
Приемник используется FrSky XM .
Припаиваем к нему 3 провода:
- Белый — сигнал;
- Красный 5 V;
- Черный — земля.
Провода припаиваете как показано на фото ниже (на обратной стороне есть маркировка):
Сразу отрезаем по размеру термоусадку. В нее спрячем приемник после монтажа.
Просовываете провода под низ полетного контроллера. Припаиваемся к этим контактам:
Должно получиться вот так.
На этом этапе сборки квадрокоптера нужно привязать приемник, пока вы его не спрятали в термоусадку. Берем радио, включаем, настраиваем модельку (даем имя), ставим на строчке Ch. Range — Ch1-16, Mode D16. Доходим до вот этой строчки и нажимаем колесиком на нее: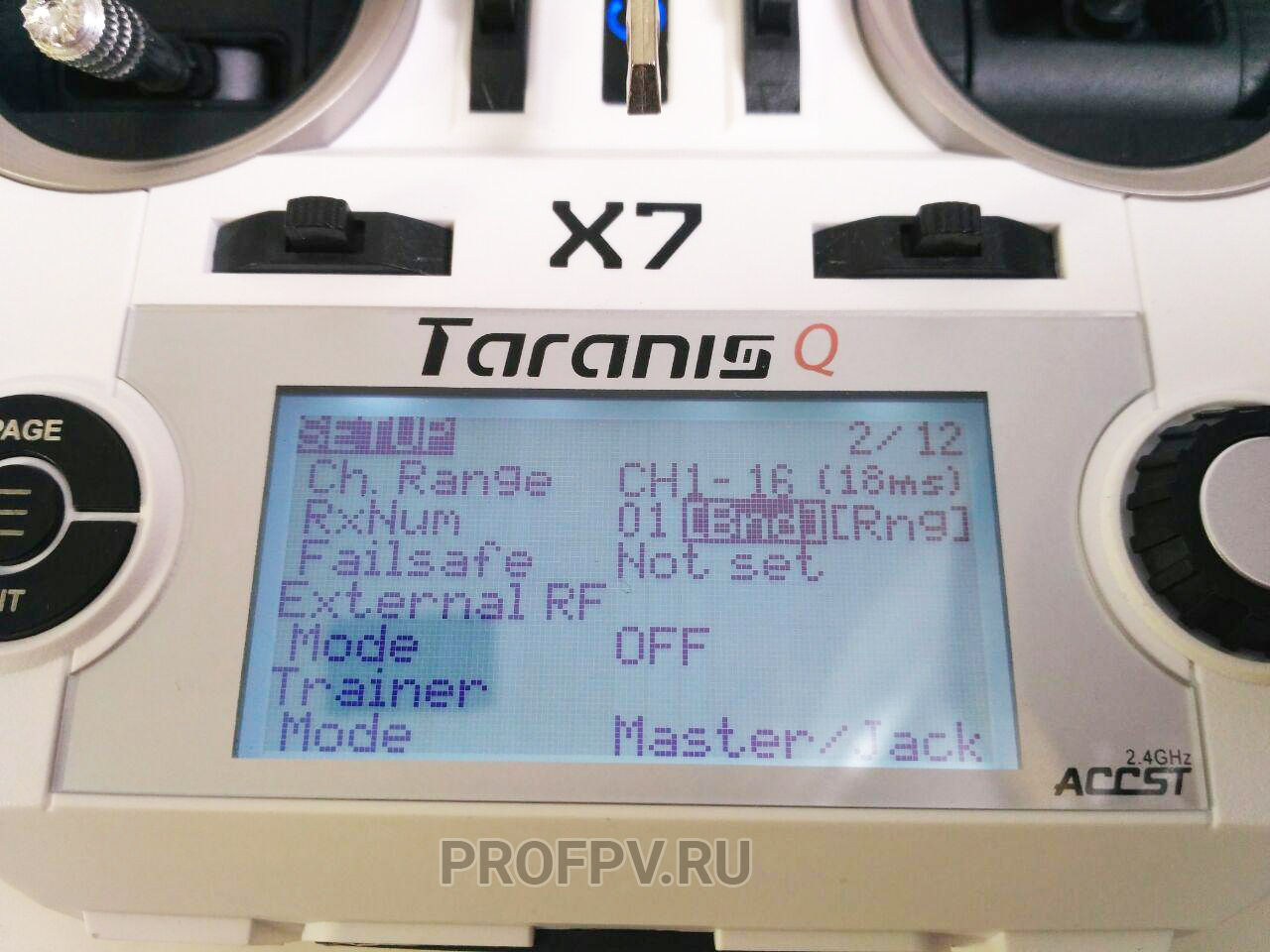
Нажимаем кнопку на приемнике, она находится сверху слева и подключаем полетный контроллер по USB к компьютеру, чтобы подать питание на приемник. Загорится зеленый светодиод, а красный будет моргать. Теперь отпускаем кнопку и снова нажимаем на аппаратуре колесиком на BND, чтобы выйти из режима привязки.
Все, вы успешно привязал приемник.
Надеваем термоусадку, усаживаем ее и заталкиваем приемник под полетный контроллер. Снаружи оставляем антенны. Мы их прикрепим к лучам рамы. Обязательное условие хорошего сигнала: антенны (если их 2), должны составлять угол 90 градусов между собой.
Чтобы у нас все получилось, берем 2 пластиковые стяжки и крепим их таким образом на лучи рамы:
Отрезаем по размеру термоусадку и надеваем. Затем усаживаем зажигалкой или феном:
Получится вот такое:
Таким образом, у вас получится идеальный угол в 90 градусов, а сами антенны прочно закреплены.
Немного теории
Вне зависимости от формы и технических возможностей квадрокоптера у него обязательно четыре винта, которые попарно вращаются в разные стороны. Это необходимо для обеспечения стабильности положения в воздухе, так как если все винты будут вращаться в одном направлении, то дрон будет крутиться вокруг своей вертикальной оси.
Перемещение дрона на Arduino и любом другом контролере осуществляется за счет изменения трех параметров:
Первый параметр определяет угол наклона вверх или вниз передней части квадрокоптера, позволяя выполнить снижение или подъем дрона. Крен определяет угол наклона, когда правая часть оказывает ниже или выше левой. Рыскание определяет угол поворота квадрокоптера Arduino вокруг вертикальной оси, проходящей через его центр тяжести, обеспечивая дрону поворот в горизонтальной плоскости на нужный угол.
Arduino – небольшая по габаритам плата (сравнима со спичечным коробком), имеющая собственный микропроцессор и память. На нем есть большое количество контактов для подключения компонентов, а возможность загрузки программы позволяет управлять ими по заданному определенному алгоритму.

В итоге плата Arduino дает широкие возможности для создания различных гаджетов, среди которых дрон лишь один из примеров.
Одновременно плата Arduino очень проста в освоении, поэтому работать с ней под силу даже людям, имеющим очень смутные познания в схемотехнике и программировании. Наличие же большого числа учебников, публикаций, видеоуроков позволит освоить простейшие действия с платой всего за пару часов.
Непосредственно программирование на Arduino идет с помощью языка С , имеющим большое распространение. Одновременно большое количество типовых программ позволит быстро его освоить до уровня, которого достаточно для управления дроном. Одновременно широкий выбор библиотек сократит время запуска первого дрона, предупредив появление детских ошибок.
Не потребует Arduino и наличия при сборке паяльника, так как вполне можно обойтись макетной доской и набором перемычек, что одновременно упрощает работу, позволяет быстро исправить какие-то недочеты и ошибки при сборке.
Обзор микроконтроллеров stm32 от st
Компания STMicroelectronics является одним из лидеров в области производства микроконтроллеров. Наибольшей популярностью пользуются семейства STM8 и STM32. Для создания дронов могут использоваться представители обоих семейств, но «смешивать» различные контроллеры в одном устройстве было бы нелогично из-за необходимости использования разных сред разработки.
В настоящий момент STM32 объединяет более семи сотен моделей из 10 семейств, отличающихся по четырем ключевым характеристикам: производительности, потреблению, стоимости, уровню интеграции (рисунок 5).
Высокопроизводительные семейства STM32F2, STM32F4, STM32F7, STM32H7. Эта группа ориентирована на достижение максимального быстродействия и отличается наиболее развитой периферией.
- STM32F2. Данное семейство построено на базе «разогнанного» до 120 МГц ядра Cortex®-M3. Объем памяти для представителей семейства составляет 128 кбайт…1 Мбайт.
- STM32F4 – чрезвычайно богатое семейство, построенное на ядре Cortex®-M4 и объединяющее почти полторы сотни микроконтроллеров. Сейчас к услугам разработчиков предоставлены модели с рабочими частотами 168…180 МГц и объемом памяти до 2 Мбайт.
- STM32F7 – производительное семейство на базе ядра Cortex®-M7 с рабочей частотой до 216 МГц и объемом Flash до 2 МБайт. Отличается максимальным разнообразием периферии, например, USB, Ethernet, CAN, HDMI, DFSDM, ЕАЕ-контроллер, графический ускоритель, контроллер внешней памяти FMC и так далее. Семейство STM32F7 оставалось наиболее мощным в номенклатуре STMicroelectronics до появления STM32H7.
- STM32H7 – флагманское семейство STMicroelectronics, производительность которого имеет рекордное значение – 856 DMIPS при рабочей частоте до 400 МГц. По сравнению с STM32F7, новые контроллеры STM32H7 могут похвастаться увеличением ОЗУ до 1 Мбайт, появлением новой периферии, в частности – высокоточного таймера HR с максимальной рабочей частотой 400 МГц и разрешением 2,5 нс, расширением коммуникационных возможностей. Например, встроенный CAN-контроллер теперь поддерживает не только традиционные протоколы ISO 11898-1 (CAN 2.0 A, B), но и CAN FD 1.0 и TTCAN (ISO 11898-4).
Очевидно, что данные семейства станут идеальным выбором для создания центральных блоков управления дронами. Для относительно простых БПЛА подойдут младшие модели STM32F2, для дронов общего назначения следует в первую очередь рассматривать STM32F4, для самых сложных профессиональных аппаратов оптимальным выбором станут STM32F7 и STM32H7.
Базовые семейства STM32F0, STM32F1, STM32F3. Данная группа включает семейства со сбалансированными характеристиками и компромиссным значением производительности/потребления/цены.
Семейства STM32F0 и STM32F3 являются идеальным выбором при создании драйверов электродвигателей для дронов. На базе STM32F0 можно реализовывать недорогие драйверы бесколлекторных электродвигателей с 6-шаговым управлением. Семейство STM32F3 подходит для создания точных драйверов двигателей с векторным управлением.
В этой же группе стоит отметить и наличие специализированного драйвера двигателя STSPIN32F0. Эта микросхема объединяет полноценный контроллер STM32F0, драйвер трехфазного поста, аналоговую периферию (компараторы, АЦП, ОУ) и микросхемы питания (LDO 12 В, DC/DC).
Малопотребляющие микроконтроллеры семейств STM32L. Данная группа объединяет семейства, ориентированные в первую очередь на достижение минимального уровня потребления. Для этого используют различные методы: динамическое управление напряжением питания, гибкую систему тактирования, специализированную периферию (LP-Timer, LP-UART), развитую систему режимов пониженного потребления и так далее.
Малопотребляющие линейки STM32 логично применять во всех блоках, кроме драйверов электродвигателей. STM32L0 идеально подойдут в качестве концентраторов на платах датчиков или в качестве управляющего микроконтроллера в модулях навигации и управления питанием.
Таким образом, при создании дронов разработчик всегда сможет подобрать себе оптимальный микроконтроллер из семейства STM32 для конкретного функционального модуля.
Особенности законодательства в области использования бпла
Дроны являются источником повышенной опасности. При этом их количество растет, а используются они зачастую в непосредственной близости от людей. Государственные органы, понимая это, начали построение соответствующей законодательной базы. Перед тем, как запустить дрон собственной разработки, необходимо ознакомиться с существующими нормативными актами.
Стоит отметить, что нормативное законодательство в РФ не устоялось, и производителям необходимо внимательно следить за вносимыми в него изменениями и нововведениями. На настоящий момент наиболее важными являются три документа:
- Постановление Правительства РФ от 11.03.2023 N 138 (ред. от 12.07.2023) «Об утверждении Федеральных правил использования воздушного пространства Российской Федерации» [3]
- Закон «О внесении изменений в Воздушный кодекс Российской Федерации в части использования беспилотных воздушных судов» [4].Согласно этому закону, государственной регистрации подлежат беспилотные воздушные суда, за исключением беспилотных гражданских воздушных судов с максимальной взлетной массой 0,25 килограмма и менее
- Порядок регистрации БПЛА будет определяться дополнительным постановлением правительства «Об утверждении порядка учета беспилотных воздушных судов, ввезенных в Российскую Федерацию или произведенных в Российской Федерации» [5]. В настоящий момент этот закон пока не действует и находится в состоянии обсуждения и согласования, но именно на этот документ следует ориентироваться производителям БПЛА
Последнее постановление устанавливает правила регистрации БПЛА в ФСБ. Юридическое или физическое лицо, изготовившее или ввезшее БПВС в Российскую Федерацию, подает в Федеральную службу безопасности заявление, в котором содержится полный список сведений как о БПЛА (государство изготовитель, тип, серийный номер, год изготовления, назначение, наименование производителя или имя изготовителя, максимальная взлетная масса, тип и количество двигателей, взлетная масса), так и о самом владельце (наименование юридического лица или имя владельца, паспортные данные, адрес, номер телефона, номер налогоплательщика или ИНН и так далее).
Очевидно, что практически любой дрон, за исключением детских игрушек, весит более 250 г, и значит, должен быть зарегистрирован. Столь жесткие нормы действуют не только в России, но и в США и других развитых странах [1]. Это объясняется тем, что даже небольшой БПЛА потенциально может стать источником террористической угрозы. С этим сложно не согласиться.
Таким образом, перед тем как начать разработку дрона, следует тщательно взвесить все «за» и «против». Это касается как коммерческой составляющей, так и возможности обеспечения требуемой безопасности. Если же решение о разработке и производстве принято, то следует определиться со структурой дрона и используемой элементной базой.
Особенности построения контроллеров электродвигателей на базе компонентов от st
Электродвигатели – ключевые элементы любого дрона. В БПЛА используются высокооборотистые моторы для создания необходимой подъемной силы. Значительная скорость вращения лопастей вынуждает разработчиков использовать бесколлекторные двигатели вместо щеточных двигателей постоянного тока (DC-двигатели).
Бесколлекторные двигатели (BLDC-двигатели) не используют щеточных узлов и при наличии хороших подшипников требуют минимального технического обслуживания. Ротор BLDC-двигателей изготавливается из постоянного магнита и не имеет обмоток. Статор содержит обмотки, переменное поле которых приводит к вращению ротора.
В самом простом случае используют алгоритм из шести шагов (рисунок 6). На каждом из шагов активными являются только две обмотки: одна коммутируется на землю, вторая на шину питания, третья остается неподключенной. При этом для управления скоростью вращения необходимо формировать ШИМ-сигналы и точно определять моменты, когда вал двигателя провернулся и необходимо перейти к возбуждению следующей обмотки. Моменты перехода могут определяться с помощью датчиков либо бездатчиковым способом.
Существует и более сложный алгоритм с векторным управлением. При этом переход между активными обмотками происходит не скачком, а постепенно. Таким образом, можно добиться плавного движения магнитного поля. Однако векторное управление потребует точного измерения положения вала и токов в обмотках.
C помощью компонентов производства ST можно реализовать оба метода управления. Если стоит задача создания максимально компактного решения, то идеальным вариантом станет использование микросхемы STSPIN32F0 с интегрированными драйверами транзисторов (рисунок 7).
STSPIN32F0 представляет собой «систему в корпусе» (SIP), которая создана специально для управления работой трехфазных бесколлекторных двигателей с питающим напряжением до 45 В. В состав STSPIN32F0 входят:
- микроконтроллер STM32F031x6x7 с 32-битным ядром ARM® Cortex®-M0, рабочей частотой до 48 МГц, 4 кбайт ОЗУ, 32 кбайт Flash и программированием по SWD;
- 16-битный таймер с тремя парами комплементарных выходов и программируемым мертвым временем для формирования ШИМ-сигналов для драйверов транзисторов;
- три полумостовых драйвера силовых транзисторов со встроенными бутстрепными диодами и выходным током до 600 мА для управления трехфазным транзисторным мостом;
- четыре операционных усилителя для нормирования сигналов ОС от датчиков Холла или от бездатчиковой схемы с измерением обратной ЭДС;
- сверхбыстрый программируемый компаратор для контроля тока электродвигателя;
- встроенный DC/DC-регулятор 3,3 В с защитой от перегрузки, КЗ и перегрева для питания низковольтных схем;
- встроенный LDO 12 В с защитой от перегрева для питания драйверов, компараторов и ОУ;
- широкий выбор дополнительной периферии: 16 каналов ввода-вывода, 5 таймеров, 12-битный 9-канальный АЦП;
- коммуникационные интерфейсы: I²C, USART и SPI.
STSPIN32F0, благодаря наличию операционных усилителей и АЦП, может реализовать не только 6-шаговое, но и векторное управление.
Для создания силового трехфазного моста компания ST предлагает использовать низковольтные транзисторы семейства StripFET 7, которое объединяет около сотни моделей с различными характеристиками:
- с рейтингом напряжения 40/60/80/100 В;
- с максимальным током стока 4…260 А;
- с сопротивлением открытого канала 1,1…8 мОм;
- с зарядом затвора 8…193 нКл;
- с различными корпусными исполнениями: DPAK, D2PAK, ISOTOP, Max247, SOT-223, TO-220, TO-220FP, TO-247, PowerFLAT 5×6/3,3×3,3/2×2 мм, SO-8 and SOT23-6L.
https://www.youtube.com/watch?v=5UV25lRslOY
В качестве примеров идеального компромисса тока/габаритов можно привести силовые ключи STL140N4F7AG и STL160NS3LLH7.
STL140N4F7AG – N-канальный полевой транзистор с рабочим напряжением до 40 В и постоянным током до 120 А. Несмотря на миниатюрный корпус PowerFLAT 5×6 WF 6×5 мм, значение типового сопротивления открытого канала этого ключа – всего 2,1 мОм (Uзи = 10 В).
Силовой N-канальный ключ STL160NS3LLH7 выпускается в том же корпусном исполнении PowerFLAT 5×6 WF, отличается большим допустимым током до 160 А, но меньшим напряжением 30 В. Увеличения тока удалось добиться за счет снижения сопротивления до типового значения 1,6 мОм (Uзи = 10 В).
По своим основным характеристикам семейство транзисторов StripFET 7 превосходит предыдущее семейство StripFET 6 почти в два раза. Такие показатели являются рекордными не только для самой компании STMicroelectronics, но и для ее основных конкурентов.
Если по каким-то причинам возможностей STSPIN32F0 не хватает, следует рассмотреть варианты реализации контроллера двигателя на базе микроконтроллеров STM32 и внешних драйверов силовых ключей. Например, мощный контроллер двигателя с 6-шаговым алгоритмом управления просто реализовать с помощью бюджетных моделей STM32F0 (рисунок 8).
Выбор микроконтроллеров STM32F0 достаточно логичен из-за таких очевидных преимуществ как:
- сверхнизкая цена;
- быстродействующее 32-битное ядро ARM® Cortex®-M0 с рабочей частотой до 48 МГц;
- наличие 16-битного таймера с тремя парами комплементарных выходов и программируемым «мертвым» временем для формирования ШИМ-сигналов для внешних драйверов транзисторов;
- наличие 12-битного АЦП для контроля параметров вращения;
- широкий выбор коммуникационных интерфейсов: I²C, SPI, UART, а также CAN и USB.
В данном случае на первое место поставлена цена, что не случайно. Дело в том, что приведенный набор периферийных блоков можно найти практически во всех семействах STM32 (кроме STM32L), но ни одно из них не сможет сравниться с STM32F0 по стоимости.
Если требуется получить прецизионное векторное управление мощным двигателем, то вместо STM32F0 следует воспользоваться микроконтроллерами STM32F3. Это наиболее «продвинутое» семейство для работы с аналоговыми сигналами. Преимуществами STM32F3 являются:
- повышенное быстродействие благодаря производительному ядру ARM® Cortex®-M4 с рабочей частотой до 72 МГц;
- 16-битные таймеры для формирования ШИМ-сигналов;
- до четырех быстродействующих АЦП последовательного приближения со скоростью преобразования от 200 нc и общим числом до 39 каналов;
- до двух 12-битных ЦАП;
- до семи быстродействующих аналоговых компараторов со временем срабатывания 25 нс;
- до четырех ОУ с программируемым усилением;
- 16-битный ΣΔ-АЦП;
- широкий выбор коммуникационных интерфейсов: I²C, SPI, UART, CAN, USB.
Для управления силовыми транзисторами можно воспользоваться драйверами производства STMicroelectronics. В настоящий момент номенклатура компании насчитывает полтора десятка драйверов полумостов:
- с максимальным током до 650 мА;
- со встроенным диодом;
- с рабочим напряжением шины до 600 В.
В качестве конкретного примера можно привести L6398 – драйвер полумоста со встроенным диодом, выходным током до 450 мА и напряжением шины 600 В.
Чтобы продемонстрировать преимущества своей продукции, компания STMicroelectronics предполагает начать выпуск специализированных отладочных плат STEVAL-ESC001V1.
Питание и контроллеры питания
Капитан подсказывает: чем больше мощность мотора, тем больше батарейка ему нужна. Большая батарейка — это не только емкость (читай, время полета), но и максимальный ток, которая она отдает. Но чем больше батарейка, тем больше и ее вес, что вынуждает скорректировать наши прикидки относительно винтов и моторов.
На сегодняшний день все используют литий-полимерные батарейки (LiPo). Они легкие, емкие, с высоким током разрядки. Единственный минус — при отрицательных температурах работают плохо, но если их держать в кармане и подключать непосредственно перед полетом, то во время разряда они сами слегка разогреваются и не успевают замерзнуть. LiPo-элементы вырабатывают напряжение 3,7 В.
При выборе батареи стоит обращать внимание на три ее параметра: емкость, измеряемую в миллиампер-часах, максимальный ток разряда в емкостях аккумулятора (С) и число ячеек (S). Первые два параметра связаны между собой, и при их перемножении ты узнаешь, сколько тока сможет отдавать этот аккумулятор продолжительное время.
Например, твои моторы потребляют 10 А каждый и их четыре штуки, а батарея имеет параметры 2200 мА · ч 30/40C, таким образом, коптеру требуется 4 • 10 A = 40 A, а батарея может выдавать 2,2 A • 30 = 66 A или 2,2 А • 40 = 88 А в течение 5–10 секунд, что явно будет достаточно для питания аппарата.
Также эти коэффициенты напрямую влияют на вес аккумулятора. Внимание! Если тока будет не хватать, то в лучшем случае батарея надуется и выйдет из строя, а в худшем загорится или взорвется; это же может произойти при коротком замыкании, повреждении или неправильных условиях хранения и зарядки, поэтому используй специализированные зарядные устройства, аккумуляторы храни в специальных негорючих пакетах и летай с «пищалкой», которая предупредит о разрядке.
Число ячеек (S) указывает на количество LiPo-элементов в батарее, каждый элемент выдает 3,7 В, и, например, 3S-аккумулятор будет отдавать примерно 11,1 В. Стоит обращать внимание на этот параметр, так как от него зависят скорость оборотов моторов и тип используемых регуляторов.
Элементы батареи объединяют последовательно или параллельно. При последовательном включении увеличивается напряжение, при параллельном — емкость. Схему подключения элементов в батарее можно понять по ее маркировке. Например, 3S1P (или просто 3S) — это три последовательно подключенных элемента.
Однако моторы подключаются к батарее не напрямую, а через так называемые регуляторы скорости. Регуляторы скорости (они же «регули» или ESC) управляют скоростью вращения моторов, заставляя твой коптер балансировать на месте или лететь в нужном направлении.
Большинство регуляторов имеют встроенный стабилизатор тока на 5 В, от которого можно питать электронику (в частности, «мозг»), можно использовать отдельный стабилизатор тока (UBEC). Выбираются контроллеры скорости исходя из потребления мотором тока, а также возможности перепрошивки.
Обычные регули довольно медлительны в плане отклика на поступающий сигнал и имеют множество лишних настроек для коптеростроительства, поэтому их перепрошивают кастомными прошивками SimonK или BLHeli. Китайцы и тут подсуетились, и часто можно встретить регуляторы скорости с уже обновленной прошивкой.
Не забывай, что такие регули не следят за состоянием аккумулятора и могут разрядить его ниже 3,0 В на банку, что приведет к его порче. Но в то же время на обычных ESC стоит переключить тип используемого аккумулятора с LiPo на NiMH или отключить уменьшение оборотов при разрядке источника питания (согласно инструкции), чтобы под конец полета внезапно не отключился мотор и твой беспилотник не упал.
Моторы подключаются к регулятору скорости тремя проводами, последовательность не имеет значения, но если поменять любые два из трех проводов местами, то мотор будет вращаться в обратном направлении, что очень важно для коптеров.
Два силовых провода, идущих от регулятора, надо подключить к батарейке. НЕ ПЕРЕПУТАЙ ПОЛЯРНОСТЬ! Вообще, для удобства регуляторы подключают не к самой батарейке, а к так называемому Power Distribution Module — модулю распределения энергии. Это, в общем-то, просто плата, на которой припаяны силовые провода регуляторов, распаяны разветвления для них и припаян силовой кабель, идущий к батарее.
Полезные видео о том, как собрать квадрокоптер своими руками
Желание подняться в небо, наверное, никогда не покидало человека. В этой инструкции мы сделаем шаг навстречу мечте и сделаем своими руками квадрокоптер.
Шаг 1: Строем раму
Смотрим на рисунок и по макету моделируем каркас квадрокоптера. В основе этого устройства будет находиться деревянная рама. Для её изготовления понадобятся деревянные рейки следующих размеров: 60х3х2.4см и 57х3х2.4 см, а также прямоугольная дощечка 15х6х0.2см. Далее используя клей и гвозди делаем «крестовую» конструкцию, которая и послужит каркасом.
Шаг 2. Подготавливаем мотор
На данном этапе самое время установить мотор, пропеллер и устройство по регулировке скоростей (все элементы можно приобрести в Интернете). Для изготовления квадрокоптера из этой инструкции, использовался двигатель EMAX MT2213 935kv, винты в 24 сантиметров, EMAX 4in1 ESC.
Шаг 3. Установка двигателя
Прибегнув к штангенциркулю и карандаша, наносим разметки на основу и просверливаем ее дрелью, затем закрепляем мотор соответствующими винтами.
Шаг 4: Установка регулятора скорости
После этапа с установкой двигателя на нижнюю часть рамы устанавливаем стяжки контроллера скорости и провода, после этого — батарею питания.
Шаг 5: Крепим шасси
Для изготовления шасси можно с трубы диаметром 15 см, обрезать шириной в 2 см. кольца, в количестве 4 шт.и крепим их к каркасу скотчем. Этот шаг предназначен для плавной посадки квадрокоптера на поверхность.
Шаг 6: Монтаж контроллера квадрокоптера
Именно он стабилизирует полет устройства и является главным элементом этого процесса. Лидеры продаж: «ArduPilot» – основан на Arduino , отличается высокой — «продвинутый» контроллер, в ценовом сегменте, подороже вышеуказанного, но с набором разных функций.
«OpenPilot CC3D» — основан на STM32 и MPU6000 и шесть каналов. Также его можно перепрошивать. «NAZE32» — замысловатое устройство, с которым работают опытнфые специалисты. «KK2.1» – самый популярный в Интернете, оснащен AVR микроконтроллером, имеет жидкокристаллический дисплей. «KKMulticontroller» – основан на Atmel AVR, считается немного устаревшей моделью .
Шаг 7: Устанавливаем пульт
Вообщем, модели разнообразные от дорогостоящих — Futaba, Spektrum, до малостоящих — Turnigy и Flysky. Для изготовления этого квадрокоптера понадобится 4-х канальный пульт управления.
Шаг 8: Установка и настройка электронной «начинки»
По приведенной видео инструкции устанавливаем всю имеющуюся электронику.
Шаг 9: Время тестов
До того как запустить квадрокоптер, нужно опробовать первый полет, что и делаем.
Шаг 10: Запуск
Прошивка регуляторов оборотов в blhelisuite
Сначала нам нужно открыть BLHeliSuite и прошить регуляторы оборотов. На нужна версия без 32 и на момент опубликования, она называлась BLHeliSuite16714901.
Запускаем и открываем. Сверху выбираем для Cleanflight:
Внизу выбираем нужный порт (чтобы узнать какой, подсоедините USB к полетному контроллеру и посмотрите, какой порт появился в списке. Это же можно посмотреть и в диспетчере устройств) и нажимаем Read Setup, чтобы прочитать настройки.
Не забудьте снять пропеллеры!
Программа скажет, что настройки прочитаны успешно:
Нажимаем Flash BLHeli:
Далее вам система предложит выбрать версию прошивки и прочие схемы, везде соглашаемся и ничего не меняем:
В конце программа предложит прошить второй регулятор оборотов. Делаем все тоже самое, так как их 4 штуки:
В конце программа сообщит, что все 4 регулятора оборотов прошиты:
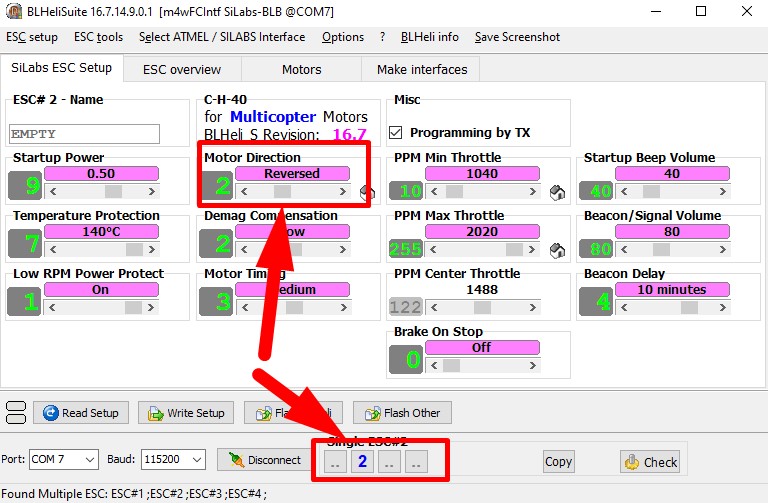
В этой же программе можно будет менять направление вращения моторов, это нужно, чтобы квадрокоптер смог летать. Вращаться они должны по такой схеме:
В этой программе вы также сможете настраивать музыку, которая звучит при включении и сочинять свою. Программа для тонкой настройки регуляторов оборотов. Но если вам не хочется разбираться в настройках и просто нужно прошить регуляторы, то вам подойдет простое приложение — BLHeli Configurator.
Для простой прошивки регуляторов, читайте статью: Как прошить полетный контроллер и ESC BLhelli. Прошивка квадрокоптера
Здесь все гораздо проще и интуитивно понятно.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот | |
|---|---|---|---|---|---|---|---|
| Схема передатчика. Рисунок 1. | |||||||
| DD1 | Микросхема | К561ЛЕ10 | 1 | Поиск в магазине Отрон | |||
| DD2 | Микросхема | К561ИЕ8 | 1 | Поиск в магазине Отрон | |||
| VT1, VT2 | Биполярный транзистор | КТ315Г | 2 | Поиск в магазине Отрон | |||
| VD1 | Диод | КД503А | 1 | Поиск в магазине Отрон | |||
| С1 | Конденсатор | 6800 пФ | 1 | Поиск в магазине Отрон | |||
| С2 | Конденсатор | 0.047 мкФ | 1 | Поиск в магазине Отрон | |||
| С3 | Конденсатор | 27 пФ | 1 | Поиск в магазине Отрон | |||
| С4 | Конденсатор | 16 пФ | 1 | Поиск в магазине Отрон | |||
| С5 | Конденсатор | 43 пФ | 1 | Поиск в магазине Отрон | |||
| R1 | Резистор | 750 кОм | 1 | Поиск в магазине Отрон | |||
| R2 | Резистор | 270 кОм | 1 | Поиск в магазине Отрон | |||
| R3 | Резистор | 110 кОм | 1 | Поиск в магазине Отрон | |||
| R4 | Резистор | 33 кОм | 1 | Поиск в магазине Отрон | |||
| R5 | Резистор | 7.5 кОм | 1 | Поиск в магазине Отрон | |||
| R6 | Резистор | 220 Ом | 1 | Поиск в магазине Отрон | |||
| Z1 | Кварцевый резонатор | 27.12 МГц | 1 | Поиск в магазине Отрон | |||
| L1 | Катушка индуктивности | 1 | Изготавливается самостоятельно | Поиск в магазине Отрон | |||
| Схема приемника. Рисунок 2. | |||||||
| VT1-VT4 | Биполярный транзистор | КТ315Г | 4 | Поиск в магазине Отрон | |||
| С1 | Конденсатор | 4.7 пФ | 1 | Поиск в магазине Отрон | |||
| С2 | Конденсатор | 27 пФ | 1 | Поиск в магазине Отрон | |||
| С3 | Конденсатор | 0.015 мкФ | 1 | Поиск в магазине Отрон | |||
| С4, С8, С11, С12 | Электролитический конденсатор | 10 мкФ 10 В | 4 | Поиск в магазине Отрон | |||
| С5 | Конденсатор | 18 пФ | 1 | Поиск в магазине Отрон | |||
| С6 | Конденсатор | 2200 пФ | 1 | Поиск в магазине Отрон | |||
| С7 | Конденсатор | 0.047 мкФ | 1 | Поиск в магазине Отрон | |||
| С9 | Конденсатор | 0.1 мкФ | 1 | Поиск в магазине Отрон | |||
| С10 | Конденсатор | 3300 пФ | 1 | Поиск в магазине Отрон | |||
| С13 | Электролитический конденсатор | 500 мкФ 6.3 В | 1 | Поиск в магазине Отрон | |||
| R1 | Резистор | 33 кОм | 1 | Поиск в магазине Отрон | |||
| R2 | Резистор | 20 кОм | 1 | Поиск в магазине Отрон | |||
| R3 | Резистор | 3.3 кОм | 1 | Поиск в магазине Отрон | |||
| R4 | Резистор | 9.1 кОм | 1 | Поиск в магазине Отрон | |||
| R5 | Резистор | 510 кОм | 1 | Поиск в магазине Отрон | |||
| R6 | Подстроечный резистор | 1 МОм | 1 | Поиск в магазине Отрон | |||
| R7 | Резистор | 12 кОм | 1 | Поиск в магазине Отрон | |||
| R8 | Резистор | 2 кОм | 1 | Поиск в магазине Отрон | |||
| R9 | Резистор | 1 кОм | 1 | Поиск в магазине Отрон | |||
| R10 | Резистор | 22 кОм | 1 | Поиск в магазине Отрон | |||
| R11 | Резистор | 7.5 кОм | 1 | Поиск в магазине Отрон | |||
| L1 | Катушка индуктивности | 1 | Изготавливается самостоятельно | Поиск в магазине Отрон | |||
| L2 | Дроссель | 30 мкГн | 1 | Дроссель типа ДМ-0.2 | Поиск в магазине Отрон | ||
| Схема дешифратора. Рисунок 4. | |||||||
| DD1, DD8 | Микросхема | К561ЛП2 | 2 | Поиск в магазине Отрон | |||
| DD2 | Микросхема | К561ИЕ10 | 1 | Поиск в магазине Отрон | |||
| DD3, DD4 | Микросхема | К561ИР2 | 2 | Поиск в магазине Отрон | |||
| DD5 | Микросхема | К561ЛП13 | 1 | Поиск в магазине Отрон | |||
| DD6 | Микросхема | К561ИД1 | 1 | Поиск в магазине Отрон | |||
| DD7 | Микросхема | К561ТМ2 | 1 | Поиск в магазине Отрон | |||
| VT1, VT2 | Биполярный транзистор | КТ815А | 2 | Поиск в магазине Отрон | |||
| VD1 | Диод | КД503А | 1 | Поиск в магазине Отрон | |||
| С1 | Конденсатор | 0.01 мкФ | 1 | Поиск в магазине Отрон | |||
| С2 | Конденсатор | 0.033 мкФ | 1 | Поиск в магазине Отрон | |||
| С3, С4 | Конденсатор | 0.1 мкФ | 2 | Поиск в магазине Отрон | |||
| R1 | Резистор | 110 кОм | 1 | Поиск в магазине Отрон | |||
| R2 | Резистор | 620 кОм | 1 | Поиск в магазине Отрон | |||
| Дополнение по общей схеме. Рисунок 5. | |||||||
| С1-С4 | Конденсатор | 0.22 мкФ | 4 | Поиск в магазине Отрон | |||
| L1-L4 | Дроссель | 12 мкГн | 4 | Дроссель типа ДМ-3 | Поиск в магазине Отрон | ||
| М1, М2 | Электродвигатель постоянного тока | 6 Вольт | 2 | Поиск в магазине Отрон | |||
| HL1 | Лампочка | 6 Вольт | 1 | Поиск в магазине Отрон | |||
| БВ1, БВ2 | Батарея питания | 6 Вольт | 2 | Поиск в магазине Отрон | |||
| SA1 | Спаренный выключатель питания | 1 | Поиск в магазине Отрон | ||||
| SB1, SB2 | Выключатель | 2 | Поиск в магазине Отрон | ||||
| Антенна | 1 | Велосипедная спица | Поиск в магазине Отрон | ||||
Схема приемника
Для управления моделью радиолюбители довольно часто используют приемники, построенные по схеме сверхрегенератора. Это связано с тем, что сверхрегенеративный приемник, имея простую конструкцию, обладает очень высокой чувствительностью, порядка 10…20 мкВ.
Схема сверхрегенеративного приемника для модели приведена на рис. 3. Приемник собран на трех транзисторах и питается от батареи типа «Крона» или другого источника напряжением 9 В.
Первый каскад приемника представляет собой сверхрегенеративный детектор с самогаше-нием, выполненный на транзисторе VT1. Если на антенну не поступает сигнал, то этот каскад генерирует импульсы высокочастотных колебаний, следующих с частотой 60…100 кГц. Это и есть частота гашения, которая задается конденсатором С6 и резистором R3.
Рис. 3. Принципиальная схема сверхрегенеративного приемника радиоуправляемой модели.
Усиление выделенного командного сигнала сверхрегенеративным детектором приемника происходит следующим образом. Транзистор VT1 включен по схеме с общей базой и его коллекторный ток пульсирует с частотой гашения.
При отсутствии на входе приемника сигнала, эти импульсы детектируются и создают на резисторе R3 некоторое напряжение. В момент поступления сигнала на приемник продолжительность отдельных импульсов возрастает, что приводит к увеличению напряжения на резисторе R3.
Приемник имеет один входной контур L1, С4, который с помощью сердечника катушки L1 настраивается на частоту передатчика. Связь контура с антенной — емкостная.
Принятый приемником сигнал управления выделяется на резисторе R4. Этот сигнал в 10…30 раз меньше напряжения частоты гашения.
Для подавления мешающего напряжения с частотой гашения между сверхрегенеративным детектором и усилителем напряжения включен фильтр L3, С7.
При этом на выходе фильтра напряжение частоты гашения в 5… 10 раз меньше амплитуды полезного сигнала. Продетектированный сигнал через разделительный конденсатор С8 подается на базу транзистора VT2, представляющего собой каскад усиления низкой частоты, а далее на электронное реле, собранное на транзисторе ѴТЗ и диодах VD1, VD2.
Усиленный транзистором ѴТЗ сигнал выпрямляется диодами VD1 и VD2. Выпрямленный ток (отрицательной полярности) поступает на базу транзистора ѴТЗ.
При появлении тока на входе электронного реле, коллекторный ток транзистора увеличивается и срабатывает реле К1. В качестве антенны приемника можно использовать штырь длиной 70… 100 см. Максимальная чувствительность сверхрегенеративного приемника устанавливается подбором сопротивления резистора R1.
Шаг №3. скетч для arduino
После подключения к Arduino платы MPU-6050 необходимо загрузить скетч I2C scanner code, куда вставляется код программы. Обратим внимание, что на этом этапе пригодятся хоть минимальные познания в программировании на Arduino, поэтому при отсутствии даже них стоит сделать небольшую паузу и разобраться с особенностями.

Теперь откройте серийный монитор Arduino IDE (он находится в разделе Tools на вкладке Serial Monitors) и убедиться в наличии подключенного 9600. Если все предыдущие этапы были выполнены верно, то будет обнаружено устройство I2C с присвоенным адресом 0х69 или 0х68, который нужно записать.
Теперь можно загрузить один из скетчей, который будет постоянно обрабатывать информацию с акселерометра и гироскопа. В интернете подобных скетчей для Arduino достаточно много, поэтому выбирайте любой, но ориентируйтесь на отзывы пользователей. После скачивания подобного скетча проведите его разархивирование.
Теперь обязательно откройте файл MPU6050_DMP6. Если у вас был присвоен адрес 0х69, то обязательно нужно расскоментировать строку после #includes, так как по умолчанию присваивается 0х68. На этом этапе уже можно получить первые значения с гироскопа и акселерометра. Для этого загрузите программу и откройте с 115200 окно серийного монитора, следуя дальнейшим инструкциям.

После сборки квадрокоптера на Arduino нужно будет откалибровать параметры акселерометра и гироскопа. Для этого достаточно найти ровную плоскую поверхность и поставить на нее плату. Теперь достаточно запустить скетч для проведения калибровки, после которой имеющиеся отклонения записываться и учитываются в скетче MPU6050_DMP6.
Электроника и модуль питания
Набор электроники дронов (квадрокоптеров) традиционно состоит из контроллера полёта и беспроводной системы управления. Сюда же можно отнести и модуль питания, так как большинство питающих модулей наделяются электронной системой мониторинга АКБ.
Состояние заряда аккумулятора – важный момент полёта. Трудно представить, что станется с аппаратом, если АКБ разрядится, к примеру, во время полёта над водоёмом.
Контроллер полёта поддерживает стабильность полёта квадрокоптера, путём обработки данных относительно направления и силы ветра, а также многих других параметров.
Контроллер полёта на чипе STM32F103C8T6: 1, 2 — пищалка ( ; -); 3 — поток; 4 — RCCI; 5 — корпус; 6 — 5 вольт; 7 — батарея; 8, 9 — UART TX, RX; 10 — индикатор полосы; 11, 12, 13, 14 — моторы; 15 — PPM
Контроллер, как правило, оснащается так называемой «прошивкой» — микросхемой памяти, куда записываются базовые сведения для чипа, подобного микроконтроллеру фирмы AVR.
Контроллер полёта можно купить в готовом варианте, но не исключается также сборка схемы своими руками. Правда, для второго варианта необходимо иметь навыки электронщика и соответствующие . Поэтому проще всё-таки воспользоваться готовыми решениями. Например, одним из следующих:
ArduPilot
– качественный контроллер (дорогостоящий), предназначенный для летательных аппаратов беспилотного управления. Прошивка отличается наличием полностью автоматизированных режимов полёта. Система обеспечивает высокие технические характеристики.
OpenPilot CC3D
– система на базе Digital Motion Processor, наделённая целым семейством датчиков организации полёта. Включает в состав трёхкоординатный акселерометр и гироскоп. Проект достаточно легко настраивается и устанавливается. Имеется руководство пользователя.
NAZE32
– тоже достаточно гибкая и мощная система, но видится несколько усложнённой в плане настройки. Оснащается продвинутой программой прошивки.
KK2
– одно из популярных решений, которое часто выбирают начинающие, так как контроллер относительно недорогой и оснащается ЖК-дисплеем. Основой схемы является микроконтроллер AVR одной из последних модификаций. Схемой предусматривается подключение датчиков MPU6050. Однако настройка только ручная.
Беспроводная система дистанционного управления состоит из передатчика и приёмника радиосигналов. Посредством системы ДУ осуществляется не только управление полётом, но также управление положением , установленной на дроне.
Пульт управления дроном (квадрокоптером) в классической вариации передатчика радиосигнала с возможностью мониторинга через ЖК-дисплей
Здесь, как правило, используются исключительно готовые решения. Например, любая из систем ДУ в списке ниже:
- Futaba 10JH 10-Channel Heli T-FHSS Computer Radio System
- Turnigy 9xr PRO Radio Control System
- Spektrum DX8 Radio Transmitter
- YKS FlySky FS-i6 2.4GHz 6 Channels Radio Control System

