
")
Делаем тяги

Наконечник для тяги гнул из 1 мм-й стальной проволоки. Уже слышу реплики из зала:
— Можно сделать из канцелярской скрепки!
Конечно можно, но у меня под рукой оказалась проволока.
Гнем «ступеньку» из проволоки плоскогубцами, высота ступеньки около 5 мм.

Отрезаем наконечник бокорезами.

К карбоновой тяге (пруток 1,5 мм) наконечник прикручивается ниткой, после накрутки смачиваем соединение «Титаном» или циакрином.

Сначала тяга устанавливается на кабанчик руля, потом на нее одевается качалка от сервы. Далее накидываем качалку на серву.
Установка двигателя
Долго я искал микрошурупы, которые оставил на даче. Потом плюнул, приклеил на циакрин. 
Крепление под двигатель приклеено на обрезок линейки. Пробовал оторвать – не получилось. 
Моторама с уже установленным двигателем 2730.
На «Титане» моторама приклеивается на свое место. Двигатель установлен. На этом снимке также хорошо видно расположение сервомашинок, которые управляют рулем направления и рулем высоты.Изготовление поплавков
Ширина поплавков 30 мм высота 40 мм. Склеил «коробочкой» одном дыхании. Но с размером кажись промахнулся, со свежего снега биплан влетать не хотел. Поплавки-лыжи надо было делать больше и шире. 
Нижняя полоса поплавка приклеивается под грузом. 
Красил поплавки питерской акриловой краской, которую купил в книжном магазине. После покраски поплавки покрыты двумя слоями яхт лака «Бор», отечественного производства. 
Прикрепить поплавки (лыжи) к крылу быстро не получилось. Я надеялся просто подклеить на нижние хвостовые балки, но получалось как-то хлипковато. Пришлось подклеивать еще одну нервюру под поплавок. Теперь поплавок опирался с одной стороны на хвостовую балку, с другой на нервюру из одинарной потолочки.
Контрольное взвешивание перед выходом на пруд. Весовая категория до 400 граммов.
Полетный вес 340 граммов.
После взвешивания гидроплан был оттриммирован.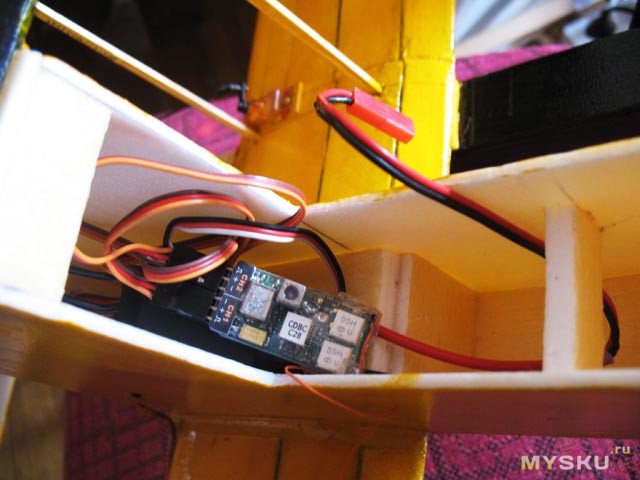
Приемник установлен 4-х граммовый 4-х канальный «Корона» 35 МГц.
Антенну запустил под крыло, по верхней хвостовой балке и «загнул» под хвост, чтобы, как говорил мой учитель труда:
— При работе на токарном станке, концы болтаться не должны!
Это его высказывание вызывало бурю эмоциональных ассоциаций у моих одноклассников.
Фюзеляж изначально проектировался под акк 610 мА, но хорошо что фюзеляж сделал пошире…
750 мА и 1000 мА акки встали как родные в распор, практически их не надо было фиксировать.
Окрашен самик удачно. На фоне неба его видно достаточно далеко.
Заход на посадку.
Одна из удачных посадок на снег.
В одном из полетов отказали элероны, в полете с сервы соскочила качалка. Ну, да забыл прикрутить.
Дополнительные соображения
- Подвес — чаще всего используется для стабилизации камеры (FPV/Аэросъёмка). Как правило устанавливается под рамой в соответствии с центром тяжести БПЛА. Может крепиться напрямую к раме, либо посредством направляющих. Для стабилизации изображения рекомендуется использовать двух, либо трёх осевые подвесы. Требует увеличения длинны посадочных опор.

- Полезная нагрузка (транспортировочная) — в любительской сфере является чем-то вроде роскоши, так как любой дополнительный вес не только сокращает время полёта, но и приводит к отказу в использовании дополнительных элементов, которые могли бы добавить беспилотнику ключевых функций. При проектировании следует понимать, что транспортировочный кейс должен быть максимально лёгким и в тоже время прочным, а также сам груз должен жёстко крепиться, исключая любое перемещение в полёте.

- Посадочные опоры — несмотря на то, что некоторые БПЛА приземляются непосредственно на раму (как правило исключаются для снижения веса), применение в конструкции посадочных опор обеспечит зазор между нижней частью БПЛА и неровной поверхностью, а также в случае жёсткой посадки принимают удар на себя, увеличивая шансы на спасение таких важных элементов дрона как камера, подвес, АКБ и рама.

- Монтаж — несмотря на то, что проектировать и изготавливать беспилотник значительно проще, чем обычный вертолёт, расположение каждого элемента следует продумать в самом начале процесса проектирования.
Общие рекомендации по монтажу:
- При создании рамы с нуля, важно, обеспечить точное расположение четырёх монтажных отверстий посредством которых осуществляется крепёж моторов к раме.
- Большинство моторов для рам размером от 400 — 600мм имеют одинаковую схему монтажных отверстий, что позволяет использовать раму от одного производителя, а моторы от другого.
- Расположение всех дополнительных компонентов в идеале должно быть симметрично относительно одной оси, что в последствии поможет облегчить поиск и регулировку центра масс беспилотника.
- В идеале контроллер полёта должен быть расположен в центре круга (и как таковой в центре масс) соединяющего все моторы.
- Контроллер полёта обычно крепится к раме при помощи стоек, резиновых демпферов или двухстороннего скотча.
- Многие производители используют одинаковое расположение монтажных отверстий для контроллера полёта (например, квадрат 35мм либо 45мм), но как токового «промышленного стандарта» не существует.
- АКБ достаточно тяжелая, и если центр масс вашей сборки немного сдвинулся, вы можете отрегулировать его переместив слегка батарею.
- Убедитесь, что крепление АКБ немного «играет», но в тоже время обеспечивает надёжную фиксацию батареи.
- Ремни с липучей основой часто используются для фиксации АКБ, тем не менее не будет лишним добавить двухсторонний скотч между батареей и рамой.

Изготовление нервюр

Для увеличения жесткости конструкции – в крылья были вклеены нервюры из двойной потолочки, по 4 на каждое из крыльев. На них опираются распорки между крыльями. Из двойной потолочки (два листа склеены «Титаном»), вырезаются заготовки 120 на 20 мм.

Обрезаются, далее складываются пакетом, вместе доводятся на шкурке до нужной формы.
Под фюзеляж в каждое из крыльев вклеено основание с профилем нервюры, на 10 мм шире фюзеляжа. Заготовка склеивается из 4-х слоев потолочки – ступеньками.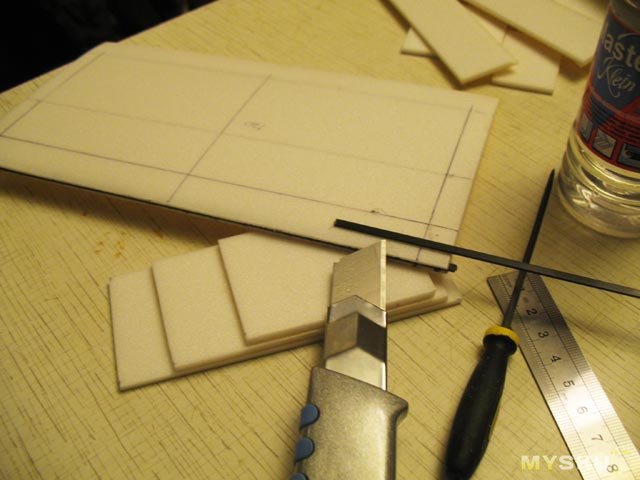
Доводим до нужной формы на шкурке.
Основание вклеиваем по середине центральной секции крыла. Сначала приклеиваем переднюю часть основания, прижав прищепкой. Затем, когда передняя часть прихватится, склеиваем хвостик.
Под места стыковки секций крыла вклеивается дополнительная полоска шириной 15 мм, на 5 мм полоска должна выступать за край центральной секции, этот уступ послужит основанием при стыковке секций. Полоска приклеивается плотно к нервюре, место склейки фиксируем прищепкой.
Хвостовые балки приклеены к нервюрам центральной секции. От крайних секций отрезаны элероны. В место крепления элеронов в крыло вклеен кусок дискеты, который будет выполнять функции петли.
Заднее оперение также армировано прутком карбона.
Предварительная примерка верхнего крыла к нижнему, примерка хвостового оперения.
Последовательность сборки (склейки) получилась такая. Хвостовые балки были приклеены к верхнему и нижнему крылу. Крылья с приклеенными балками совмещены на 4-х распорках. Совмещал на глазок. Потом склеил. Отдельно было склеено хвостовое оперение. Когда крылья склеились, попил пивка и стал приклеивать хвост. Утром пришло солнышко, сфоткал получившийся объект. С ужасом обнаружил, что миллиметра на три накосячил, когда приклеивал хвост. Отдирать уже не стал… 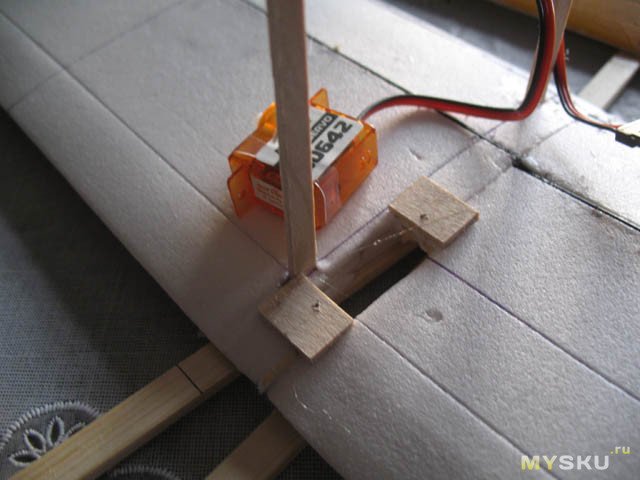
Сервомашинки крепятся «традиционно». Вырезаем в пенопласте отверстие под серву, приклеиваем прямоугольнички из линейки (приблизительно 7 мм на 15 мм). Под шурупы в прямоугольничках уже просверлены отверстия 1 мм. 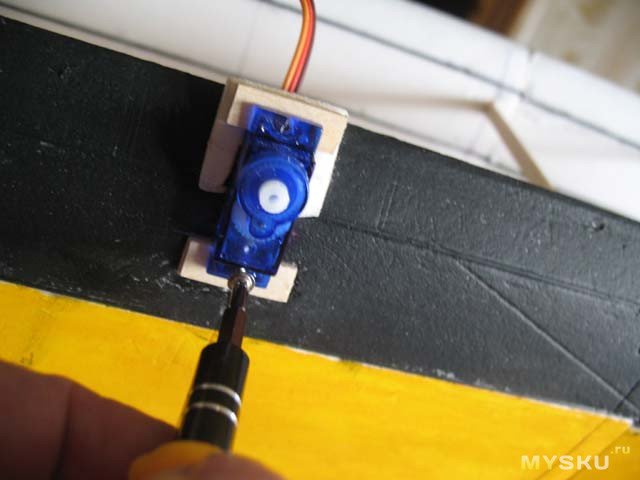
Ждем пока высохнет клей, прикручиваем серву штатными шурупами (прилагаются к сервомашинке).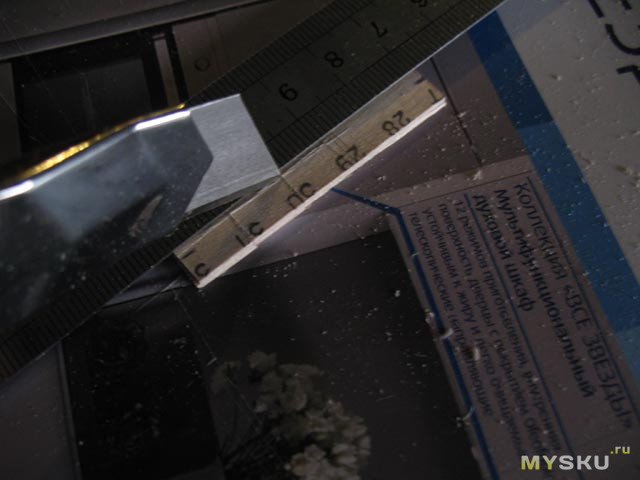
Заготовки под петли вырезаются канцелярским ножом из линейки. Прямоугольнички 5 мм на 10 мм. Между двумя прямоугольничками вклеиваем крадратик 5 мм на 5 мм. Квадратик вклеивал на суперклее «Момент» ( тот же циакрин).
Сверлим отверстие в петле. 
Верхнюю часть петли скругляем на шкурке. Потом петля вклеивается в элерон.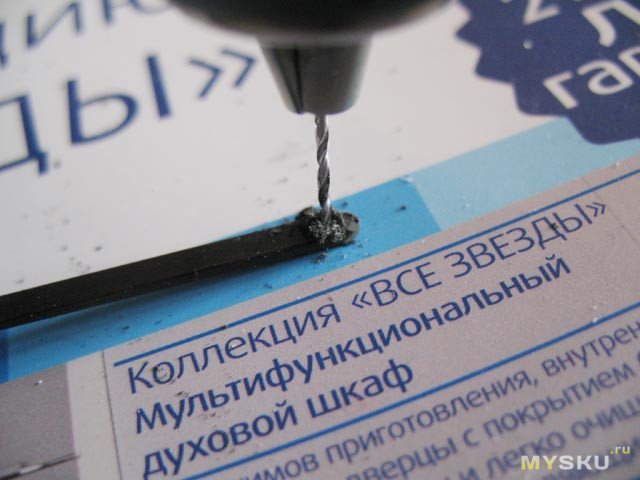
В тяге соединяющей элероны верхнего и нижнего крыла, на концах сверлим отверстия.
Тяга фиксируется в петле коротким обрезком карбонового прутка. После того, как я намучился с трескающимся при сверлении карбоном. Мне пришла в голову светлая мысль, что тяги надо было делать из той же деревянной линейки, а оси из канцелярской скрепки. Конструкция получилась бы немного тяжелее, но при планируемой завышенной энерговооруженности самика такое увеличение веса было бы просто незаметно.
Аналогичной тягой соединены два руля направления.
Вид с боку. На этом снимке хорошо видны распорки между крыльями и тяги, которые связывают элероны.
Покрыл якт-лаком нижнию часть самика. Оставил сохнуть на сутки.
Материалы исполнения бпла/конструкция
Ниже приведены наиболее распространенные материалы исполнения используемые для изготовления рам мультироторных дронов, соответственно список не полный. В идеале рама должна быть жёсткой с минимально возможной передачей вибрации.
Поролон (Пена) — как единственный материал для изготовления рам БЛА используется редко, и, как правило, в комбинации с жёстким каркасом или усиленной конструкцией. Также может применяется в стратегических целях; в качестве защиты несущих винтов (пропеллеров), шасси, не редко выступает в качестве демпфера. Поролон может быть разных типов от мягкого до относительно жёсткого.

Дерево — если в приоритете дешевизна конструкции, то дерево — это отличный вариант, который значительно сократит время сборки и изготовления запасных частей. Древесина достаточно тверда и является проверенным временем материалом. Важно чтобы при изготовлении рамы использовалась идеально прямая древесина (без изгибов и деформации).

Пластик — для большинства пользователей доступен только в виде пластиковых листов. Имеет тенденцию к изгибу и как таковой не идеален. Отлично подходит для изготовления защитного каркаса или шасси. Если вы рассматриваете возможность 3D печати, следует учитывать временной интервал изготовления (возможно проще купить комплект дооснащения UAV frame kit). 3D печать деталей отлично себя зарекомендовала при создании небольших квадрокоптеров.

Алюминий — доходит до потребителя в различных формах и размерах. Вы можете использовать листовой алюминий для исполнения корпуса, либо экструдированный алюминий для реализации лучей дрона. Алюминий не такой лёгкий, по сравнению с углеродным волокном или G10, зато цена и долговечность выступают главными преимуществами материала. Вместо разрушения или трещин, алюминий имеет склонность к изгибу. Для работы с материалом требуется только пила и дрель.

G10 (разновидность стекловолокна) — не смотря на то, что внешний вид и основные свойства практически идентичны с карбоном (углеродным волокном), является менее дорогим материалом. В основном доступен в листовом формате и используется для реализации верхних и нижних пластин рамы. Также в отличии от углеродного волокна, G10 не блокирует радиочастотные волны.

PCB (Печатная плата – пластина из диэлектрика) — по сути аналог стекловолокна, но в отличии от последнего всегда плоские. Иногда используется в качестве верхних и нижних пластин рамы, с целью уменьшения количества используемых деталей (например, плата распределения питания часто встроена в нижнюю панель). Рамы нано/мини квадрокоптеров могут быть исполнены из одной печатной платы включающей в себя всю электронную начинку.

Углеродное волокно — самый востребованный материал из-за лёгкого веса и высокой прочности. Процесс изготовления по прежнему исключительно ручной. Как правило серийно производятся простые формы, такие как плоские листы, трубчатые комплектующие; исполнение сложных трехмерных форм осуществляется на заказ.

Постройка самодельного складного коптера

Доброго времени суток уважаемые Муськовчане. Я недавно на Муське и это мой первый обзор здесь. Речь сегодня пойдет о постройке самодельного складного квадрокоптера для съемок. Итак кому интересно вэлком.
Сначала немного предыстории. Rc тематикой болен около 3х лет, и за это время собрал несколько самосборных коптеров. И вот захотелось сделать компактный дрон, что бы и в рюкзак помещался и в сумку мотоцикла, словом что бы можно было взять с собой куда угодно… ну почти, и обязательно самодельный.
Если вы решили всерьез заняться RC тематикой, то, скажем так, моделей у вас будет много разных, но вот три вещи, покупаются всерьез и надолго.
1. Зарядка для акумуляторов. Здесь я пожадничал, и купил неоригинал Imax B6 AC.

. Хоть и неоригинал, но работает исправно уже четвертый год.
2. Аппаратура радиоуправления. Я свою брал три года назад, на тот момент лучшую из бюджетных Radiolink AT9.

. Сейчас она уже не выпускается, поэтому ссылку даю на более новую AT9S
aliexpress.com/item/AT9S-2-4-9CH-R9DS-AT9/32841954226.html
. С тех пор вышел нынешний бестселлер Taranis Qx7, но менять Radiolink на нее, для себя я не вижу смысла, а если приобретать с нуля первую аппаратуру, лучше взять Таранис.
3. FPV очки или шлем. Тут вопрос довольно индивидуальный, нужно мерить конкретный образец именно на Ваше лицо. Многим не подходит фокусное расстояние некоторых шлемов, многих не устраивает форма маски некоторых очков, а может и не подойти межзрачковое расстояние. Что до меня, я начинал летать в старых очках Fatshark, о них даже говорить не буду, ибо настолько убогие, что просто нет слов. Затем использовал шлем Eachine EV800.
 aliexpress.com/item/New-Arrival-Eachine-EV800-5-Inches-800×480-FPV-Video-Goggles-5-8G-40CH-Raceband-Auto-Searching/32666906411.html
aliexpress.com/item/New-Arrival-Eachine-EV800-5-Inches-800×480-FPV-Video-Goggles-5-8G-40CH-Raceband-Auto-Searching/32666906411.html
. Вот в нем уже очень неплохое изображение и широкий диапазон каналов приемника. Сейчас летаю в купленых на барахолке, очках Aomway Commander V1

. Очки хороши, даже очень, но приобретать их за полную стоимость меня жаба душила, так что искал б.у.
А сейчас давайте перейдем непосредственно к самому коптеру, начнем пожалуй с рамы. Рама это одна из немногих вещей, купленых не в Китае, так что особо останавливаться на ней не буду. Скажу только, что рама конструкции Андрея Грушина. С учетом использования современных комплектующих, укоротил ее на 75мм.
forum.rcdesign.ru/blogs/121800/blog20789.html
Она сделана из текстолита и алюминиевого профиля 10мм.

Акумулятор я использовал Onbo 4S 4200 mAh 35c.

Идем дальше, мозгом нашего коптера будет контролер Matek F405CTR
 aliexpress.com/item/matek-BetaFlight-F405-CTR-F405-CTR-PDB/32856776468.html
aliexpress.com/item/matek-BetaFlight-F405-CTR-F405-CTR-PDB/32856776468.html
“>, не самый удачный контролер для большой рамы из-за того, что сравнительно большие пропеллеры вызывают больше низкочастотных вибраций, чем пропеллеры гоночных коптеров(для коих он и предназначен), а хорошо организовать виброразвязку этого контролера трудно потому что он совмещен с платой разводки питания, а к ней тянутся достаточно толстые силовые провода. Далее, выбираем моторы. Двигатели серии 2216 отмел, как довольно тяжелые, в то же время, требовалась достаточная мощность, что бы таскать камеру с подвесом. Выбрал моторы Gartt 2312.

Почему то найти на Алиэкспрессе я их сейчас не смог (а я только там и закупаюсь), так что ссыль дать не могу. Идем дальше, регулятор я использовал Racerstar 4 в 1 на 30а
 aliexpress.com/item/2020-New-Arrival-Racerstar-Shot30A-ESC-30A-30amp-3-6S-4-in-1-BLHeli-S-BB2/32806268101.html
aliexpress.com/item/2020-New-Arrival-Racerstar-Shot30A-ESC-30A-30amp-3-6S-4-in-1-BLHeli-S-BB2/32806268101.html
. Подвес сначала хотел использовать пластиковую, немного тюнингованную, Walkera G-2D

, но впоследствии от нее пришлось отказаться, (как и от регулятора 4 в 1). Почему, об этом чуть позже. Сейчас на коптер установлен подвес Tarot t-3D

Брал тут, только он сильно подорожал
aliexpress.com/item/Tarot-TL3T01-3Aixs-Brushless-Gimbal-for-DIY-RC-Drone-with-camera-Gopro-HERO3-HERO4-Sport-Camera/32642968051.html
. Подвес по всем критериям очень средненький, но довольно легкий и компактный. Камера из разряда «дешево и сердито», народная Xiaomi Yi

Брал тут
aliexpress.com/item/YI-1080P-Action-Camera-Lime-Green-High-definition-16-0MP-155-Degree-Angle-3D-Noise-Reduction/32826768360.html
. Для своей цены она снимает просто великолепно, а есть еще возможность использовать скрипты для улучшения качества видео, но в планах перейти конечно на Xiaomi Yi 4k. Для передачи видеосигнала с камеры в полетный контролер (там ведь встроенное ОСД (Осд, это микросхема, которая накладывает различные параметры полета (высота, скорость и.т.д.) прямо на изображение)), взял вот такой шнурок

Вот ссылка…
aliexpress.com/item/FPV-AV-Video-Output-Transmission-Cable-Line-Image-Data-Rechargeable-Cable-For-XiaoMi-Yi-Sport-Action/32789312005.html
.
Продолжаем. Видеопередатчик, для онлайн передачи видеосигнала на землю, временно поставил самый дешевый Boscam Ts5828 мощностью 600 мВт.

Брал тут
aliexpress.com/item/2020-New-FPV-5-8GHz-600mW-32-Channels-Mini-Wireless-A-V-Transmitting-TX-Module-TS5828/32299796347.html
. Не знаю, честные там милливаты или нет, но показал он себя довольно не плохо, на 3 км связь прекрасная. Дальше пока не летал. Антенку к нему я взял фирмы Aomway, вот такую

Брал их тоже на Али
aliexpress.com/item/1pcs-5-8G-3dBi-4-Leaf-Clover-AV-Transmission-RHCP-TX-RX-Set-SMA-RP-SMA/32650636196.html
Приемник для этого коптера я выбрал R12dsm

, предварительно заменив на нем антены, на более качественные. Приемник GPS у меня Radiolink Ts100

Брал тут
aliexpress.com/item/TS100-M8N-gps-UBX-M8030/32845080601.html
. Этот модуль очень маленький, легкий, имеет на плате компас. Ловит как GPS, так и ГлоНасс. В хорошую погоду ловит до 23 спутника, и делает это очень быстро. К нему нам понадобится стойка крепления. Нужна она для того, что бы максимально отдалить компас от наводок, вызванных большими токами в силовых цепях дрона. Я взял самую простую

вот ссылочка на нее…
aliexpress.com/item/7/32853297266.html
. Ну и в заключении, пропеллеры. Я перепробовал достаточное количество размеров и материалов пропеллеров и конкретно на этом коптере лучше всех себя показали карбоновые пропеллеры размера 9047. Диаметр у них 9 дюймов при шаге 47.

. Вот тут брал…
aliexpress.com/item/F05309-9×4-7-3K-Carbon-Fiber-Propeller-CW-CCW-9047-CF-Props-Blade-For-RC-Quadcopter/964675104.html
Ну что, с комплектацией вроде все, если что забыл, ткните носом. Приступаем к сборке. Заранее приношу извинения за качество фото и их малое количество. Слишком был увлечен процессом. Итак поехали!
Первым делом отрезаем кусочки 10мм профиля на нужную длину (какие хотим в итоги лучи) и сверлим отверстия для крепления моторов, прокладки проводов и антен приемника радиоуправления. Получается как то так…. , крепим моторы к внутренней стороне профиля. Штатные винты придется немного укоротить, профиль намного тоньше, чем лучи любой готовой рамы, на которые расчитаны эти винты. Если этого не сделать, винт упрется в обмотку двигателя и скорее всего он преждевременно скончается. В конечном итоге получается как то так…
, крепим моторы к внутренней стороне профиля. Штатные винты придется немного укоротить, профиль намного тоньше, чем лучи любой готовой рамы, на которые расчитаны эти винты. Если этого не сделать, винт упрется в обмотку двигателя и скорее всего он преждевременно скончается. В конечном итоге получается как то так… . На этом фото видны и антены радиоуправления. Провода от моторов протягиваем через проделанные отверстия внутрь луча. Я еще дополнительно их защитил оплеткой «змеиная кожа». Вот как то так….
. На этом фото видны и антены радиоуправления. Провода от моторов протягиваем через проделанные отверстия внутрь луча. Я еще дополнительно их защитил оплеткой «змеиная кожа». Вот как то так…. . Далее, красим детали рамы в понравившийся цвет, крепим готовые лучи, регулятор оборотов и припаиваем моторы к его выводам ….
. Далее, красим детали рамы в понравившийся цвет, крепим готовые лучи, регулятор оборотов и припаиваем моторы к его выводам …. Тут же на фото видно установку приемника радиоуправления, видеопередатчика и понижающего стабилизатора для питания подвеса. Стабилизатор нужен для того что бы вне зависимости от напряжения силового акумулятора (14.0-16.8в), подвес питался всегда от 12в. Далее устанавливаем полетный контролер, желательно на демпферы. Я взял вот такие (за что и поплатился)
Тут же на фото видно установку приемника радиоуправления, видеопередатчика и понижающего стабилизатора для питания подвеса. Стабилизатор нужен для того что бы вне зависимости от напряжения силового акумулятора (14.0-16.8в), подвес питался всегда от 12в. Далее устанавливаем полетный контролер, желательно на демпферы. Я взял вот такие (за что и поплатился)  , но об этом чуть позже… К полетному контролеру припаиваю приемник радиоуправления, FPV кабель от камеры и кабель к видеопередатчика, а так же силовой разъем от акумулятора (его я решил вывести на проводах подальше от ПК) …
, но об этом чуть позже… К полетному контролеру припаиваю приемник радиоуправления, FPV кабель от камеры и кабель к видеопередатчика, а так же силовой разъем от акумулятора (его я решил вывести на проводах подальше от ПК) …
 … как то так. Припаиваем также разъем для подключения GPS приемника и компаса. Также нужно припаять два силовых провода для питания регулятора оборотов и шлейф управления регулятором. Все припаяно по схеме, взятой с официального сайта производителя ПК. Вот она….
… как то так. Припаиваем также разъем для подключения GPS приемника и компаса. Также нужно припаять два силовых провода для питания регулятора оборотов и шлейф управления регулятором. Все припаяно по схеме, взятой с официального сайта производителя ПК. Вот она…. по этой схеме подключается регулятор, а вот по этой все остальное….
по этой схеме подключается регулятор, а вот по этой все остальное…. . Здесь не обращаем внимание на раздельные регуляторы. Получается примерно вот так….
. Здесь не обращаем внимание на раздельные регуляторы. Получается примерно вот так…. . На фото так же виден конденсатор, который припаивается параллельно силовому разъему и призван сглаживать скачки напряжения в силовой цепи. Конденсатор идет в комплекте с ПК. Так же виден конектор для управления наклоном камеры, он припаивается к выводу S6 полетного контролера и к земле. Собственно можно собирать раму до конца, ставить массогабаритный макет камеры с подвесом ( что бы не убить нежную технику в случае незапланированного краша ), сделать начальные настройки и идти в поле настраивать более точно. На квадрике установлена прошивка Inav 1.9.1. Как прошивать полетный контролер и настраивать Inav я здесь не буду описывать. Это довольно обширная тема, во первых, требующая отдельного обзора, во вторых уже полно видео и рекомендации от более опытных людей с более понятным объяснением. Но если кому нужно, могу объяснить на пальцах. А мы продолжаем… На этом фото первый полет и зависание в точке. Видео висения и пример съемки коптера будет в конце обзора…
. На фото так же виден конденсатор, который припаивается параллельно силовому разъему и призван сглаживать скачки напряжения в силовой цепи. Конденсатор идет в комплекте с ПК. Так же виден конектор для управления наклоном камеры, он припаивается к выводу S6 полетного контролера и к земле. Собственно можно собирать раму до конца, ставить массогабаритный макет камеры с подвесом ( что бы не убить нежную технику в случае незапланированного краша ), сделать начальные настройки и идти в поле настраивать более точно. На квадрике установлена прошивка Inav 1.9.1. Как прошивать полетный контролер и настраивать Inav я здесь не буду описывать. Это довольно обширная тема, во первых, требующая отдельного обзора, во вторых уже полно видео и рекомендации от более опытных людей с более понятным объяснением. Но если кому нужно, могу объяснить на пальцах. А мы продолжаем… На этом фото первый полет и зависание в точке. Видео висения и пример съемки коптера будет в конце обзора… . Теперь пришло время остановиться подробнее на демпферах, которые я использовал для полетного контролера. Дело в том, что они немного широки и не встают нормально на регулятор. Я немного их сточил с одной стороны (на фото видно, если присмотреться ), при этом оголилась внутренняя металлическая часть. Она то и замкнула один из выводов регулятора. Пришлось его заменить раздельными Racerstar Lite 30a
. Теперь пришло время остановиться подробнее на демпферах, которые я использовал для полетного контролера. Дело в том, что они немного широки и не встают нормально на регулятор. Я немного их сточил с одной стороны (на фото видно, если присмотреться ), при этом оголилась внутренняя металлическая часть. Она то и замкнула один из выводов регулятора. Пришлось его заменить раздельными Racerstar Lite 30a  По традиции ссылка вот
По традиции ссылка вот
aliexpress.com/item/Best-Deal-4PCS-Racerstar-RS30A-Lite-30A-Blheli-S-BB1-2-4S-Brushless-ESC-For-FPV/32761032518.html… и платой распределения питания от Матек  На ней уже есть выход питания на 12в, так что стабилизатор для питания подвеса теперь не нужен. Ну вот теперь с самим дроном действительно все. Налетал в таком виде около 10 акумуляторов, претензий нет. Пора устанавливать подвес и камеру. Поначалу хотел сделать подвес консольного типа (это когда демпферная площадка находится не сверху, а позади камеры ) как на TBS Discovery. Для этого разбираем подвес и делаем для него несколько новых деталей …
На ней уже есть выход питания на 12в, так что стабилизатор для питания подвеса теперь не нужен. Ну вот теперь с самим дроном действительно все. Налетал в таком виде около 10 акумуляторов, претензий нет. Пора устанавливать подвес и камеру. Поначалу хотел сделать подвес консольного типа (это когда демпферная площадка находится не сверху, а позади камеры ) как на TBS Discovery. Для этого разбираем подвес и делаем для него несколько новых деталей … У меня нет ни 3D принтера, ни ЧПУ станка, по этому все делал болгаркой и напильником. Собрал подвес в черновую, получилось вот так….
У меня нет ни 3D принтера, ни ЧПУ станка, по этому все делал болгаркой и напильником. Собрал подвес в черновую, получилось вот так…. Размеры и внешний вид меня полностью устроили и я приступил к покраске и окончательной сборке подвеса. В итоге вот что получилось
Размеры и внешний вид меня полностью устроили и я приступил к покраске и окончательной сборке подвеса. В итоге вот что получилось 
 Подвес подключается к выводам 12В на плате распределения питания и выходу S6 полетного контролера для управления камерой.
Подвес подключается к выводам 12В на плате распределения питания и выходу S6 полетного контролера для управления камерой.
Ну вот вроде бы все, пробуем взлететь и… К сожалению выяснилась одна неприятная особенность. Поток воздуха от передних винтов срывал камеру с места и подвес был не в силах ее стабилизировать. Я пробовал менять настройки, закрывать камеру сверху козырьком (колхоз, но все таки), ничего не помогало. Пришлось продать подвес Валкера и искать другой. Взял Tarot t-3d. Дело в том, что у данного подвеса есть один косяк (кроме фирменного завала горизонта конечно), расстояние между демпферами по длине еще нормальное, но вот по ширине они расположены очень близко друг к другу. Из-за это при ветре может наблюдаться раскачка подвеса и желе. Пришлось немного переделать его нижнюю пластину и расположить демпферы под углом. Такая конструкция зарекомендовала себя очень хорошо на прошлых вариантах подвесов. Далее все просто, креплю подвес на переходную пластину. Ее я сделал из текстолита и получилась она довольно веселой…. . И собственно устанавливаю готовый подвес на нее .
. И собственно устанавливаю готовый подвес на нее . . Подвес также подключил к выводам 12в с платы разводки питания, и к выводу S6 полетного контролера для управления наклоном. Сверху накрыл самодельной крышкой из стеклоткани и эпоксидки, что бы провода и платы не мозолили глаза. Собственно со сборкой наверное все, теперь немного о характеристиках. Расстояние по диагонали между осями моторов 380мм, взлетный вес 1.4кг. Дальность полета до конца не замерил, улетал на 3км и вернулся обратно, хотя управление и видео были без глюков, да и запас по батарее оставался. Думаю 3.5-3.7км вполне по силам пролететь. Высота полета неограничена, но я поднимался максимум на 250м. Время полета от батареи 4S 4200мАч 17-19мин. В сложенном состоянии лишь чуть больше аппаратуры радиоуправления ….
. Подвес также подключил к выводам 12в с платы разводки питания, и к выводу S6 полетного контролера для управления наклоном. Сверху накрыл самодельной крышкой из стеклоткани и эпоксидки, что бы провода и платы не мозолили глаза. Собственно со сборкой наверное все, теперь немного о характеристиках. Расстояние по диагонали между осями моторов 380мм, взлетный вес 1.4кг. Дальность полета до конца не замерил, улетал на 3км и вернулся обратно, хотя управление и видео были без глюков, да и запас по батарее оставался. Думаю 3.5-3.7км вполне по силам пролететь. Высота полета неограничена, но я поднимался максимум на 250м. Время полета от батареи 4S 4200мАч 17-19мин. В сложенном состоянии лишь чуть больше аппаратуры радиоуправления …. И вот такой размер в разложеном состоянии….
И вот такой размер в разложеном состоянии…. .
.
Ну и напоследок немного своих мыслей. Если вам нужен компактный коптер для съемки, то повторять этот проект не очень советую, если только вы не любите собирать, паять и настраивать больше, чем летать. Во первых, он выйдет не дешевле готовых коптеров, во вторых он потребует огромного количества терпения, внимания и усидчивости при настройке, к чему далеко не каждый готов. Что касается меня, то у меня вся периферия (видео очки, аппаратура радиоуправления, акумуляторы, зарядка и камера ) уже была и используется и на других моделях, по этому этот коптер не сильно ударил по карману. Ну и готовые коптеры мне в принципе не интересны, и летать смотря в телефон я вообще не могу. А вот и пример видео съемки с этого квадрика www.radiocopter.ru/watch?v=5io3sqrCsDk&t=0s&list=PL9-3NMPHry-hSREdbJd5T7dOUbJO-mYBM&index=12
Вот такой вот получился рассказ. В чем ошибся, или накосячил, пишите в комментариях, обоснованную критику всегда поддерживаю. Всем пока
Собираем беспилотник. часть 1. комплектующие
Рама, требуется достаточно прочная и вместительная, на ней все будем размещать – 1360 руб комплект
Ноги, они требуются для того чтобы лягко сажать коптер на землю, неповреждая винты и подвес, если он будет установлен – 290 руб комплект
моторы, расчет моторов чуть позже, для первого потера подойдут за 553 руб x 4 штуки, по количеству лучей на раме
регулятор, плата запуска моторов, ESC 30A около 400 руб x 4 штуки, столько же сколько и моторов
Пропеллеры 10 дюймов с шагом 4.5 см (1045) – 153 руб комплект (4 шт)
Полетный контроллер, для неопытного пилота лучше использовать Naza-lite – цена и устойчивость работы в хорошем соотношении
Naza lite 4000 руб комплект без GPS
Аккумулятор – сердце нашего коптера, от его характеристик зависит длительность полета. Один для коптера, другой для пульта. Лучше взять одинаковые по характеристикам, чтобы можно было всегда перекинуть – 460 руб x 2 штуки
Зарядка, ну тут понятно, надо же чем-то заряжать аккумы – 680 руб.
Блок питания для зарядки 580 руб.
Индикатор напряжения, покажет нам состояние аккумув прямо на коптере и будет злостно орать при разряде нижи установленного значения –150 руб.
Радиоаппаратура (пульт и приемник), ведь надо же как-то управлять крокодилом квадрокоптером – 3500 руб.
Коммутационная плата, для удобного разведения питания моторов – 115 руб.
разъемы
XT60, для подключения аккумулятора к коптеру –200 руб
бананы, разъемы между мотором и регулятором – 100 руб.
термоусадка, изолентой пользоваться мовитон, коптер должен быть не только прочный но и красивый, ну в определенной степени – от 14 руб. за метр
провода, могут потребоваться для удлинения проводов регуляторов 60 руб. за метр, требуется 16-AWG. Провод AWG очень похож на провода для авто акустики, у него так же малое сопротивление, а токи ведь не малые, до 30 ампер.
Но почему собирать, а не купить готовый?
Давайте посмотрим на близкий по параметрам, а это DJI Phantom 2? стоимость около 25 т.р без подвеса. Корпусная компоновка агрегатов – выглядит красиво, но мало пригодно для ремонта в “поле”, а ремонт потребуется – падения неизбежны. Еще больщие минусы готового: цена на комплектующие вас не порадуют, масштабируемость (возможность усовершенствования) ограничена, а может ли сравниться распаковывание из коробки с изготовлением своими руками? когда полностью изучив аппарат, создав его запускаешь в небо или беленкий, как iphone, кусок пластика? А сколько возможностей дает радипульт – его можно настроить и для другий моделек, и не только. Коробочный вариант не дает столько возможностей для творчества.
Можно купить полный комплект коптера для сборки за 6200 руб, но здесь вас поджидает маленькая проблема – в комплекте идет крайне опасный полетный контроллер Multi Wii (новичку будет трудно справится), также слабые моторчики, отдельно надо докупить радиоаппаратуру и аккумуляторы, но вполне летающий аппарат.
Для особых “извращенцев” буду добавлять 3D модели и чертежи частей коптера, для печати на 3D принтерах или изготовления вручную, сегодня – рама.
По клику на картинку перейдете в плеер с 3D моделью луча рамы и сслыку для скачивания в ipt формате
§
§
Типы рам бпла
Трикоптер

Квадрокоптер

Гексакоптер
- Описание: «Гексакоптер» имеет шесть лучей, каждый из которых соединен с мотором. Передней частью гексакоптера принято считать сторону стыка двух лучей, но также передом может считаться и продольный луч.
- Преимущества: При необходимости, конструкция гексакоптера позволяет легко добавить два дополнительных луча и мотора, что позволит увеличить суммарную тягу, в следствии чего дрон сможет поднять больше полезной нагрузки. В случае отказа одного из моторов, допускается вероятность, что дрон сможет осуществить мягкую посадку, а не разбиться. Модульная конструкция рамы. Почти все полётные контроллеры поддерживают эту конфигурацию.
- Недостатки: Громоздкая и дорогостоящая конструкция. Дополнительные двигатели и детали увеличивают вес коптера, соответственно чтобы получить туже продолжительность полёта, что и у квадрокоптера, необходимо устанавливать более ёмкие АКБ.

Y6
- Описание: Конструкция Y6 представляет собой тип гексакоптера у которого в основе не шесть лучей, а три, каждый из которых соединён с парой соосно установленных моторов (итого 6 моторов). При этом стоит обратить внимание, что нижние пропеллеры проецируют тягу вниз.
- Преимущества: Меньшее количество компонентов по сравнению с гексакоптером. Поднимает больше полезной нагрузки по сравнению квадрокоптером. При использовании винтов с встречным вращением исключается гироскопический эффект, как у Y3. В случае отказа одного из моторов, допускается вероятность, что дрон сможет осуществить мягкую посадку, а не разбиться.
- Недостатки: Более дорогой по сравнению с квадрокоптером из-за использования дополнительных деталей, равноценных по стоимости деталям гексакоптера. Дополнительные моторы и детали увеличивают вес коптера, а значит, чтобы получить то же время полёта, что и у квадрокоптера, необходимо будет использовать АКБ большей ёмкости. Как показывает практика, тяга полученная на Y6, немного ниже чем у обычного гексакоптера, вероятно, потому, что нижний винт влияет на тягу верхнего винта. Не все полётные контроллеры поддерживают такую конфигурацию.

Октокоптер
- Описание: У октокоптера восемь лучей, каждый из которых соединен с мотором. Передней частью гексакоптера принято считать сторону стыка двух лучей.
- Преимущества: Больше моторов = больше тяги, и соответственно повышенная избыточность, позволяющая дрону уверенно перемещаться с тяжёлыми и дорогостоящими DSLR камерами.
- Недостатки: Больше моторов = более высокая цена и большой АКБ. Ввиду своей дороговизны актуален только для профессиональной сферы.

X8
- Описание: Конструкция X8 по-прежнему является октокоптером, только не с восемью, а с четырьмя лучами, каждый из которых соединён с парой соосно установленных моторов (итого 8 моторов).
- Преимущества: Больше двигателей = больше тяги, и соответственно повышенная избыточность. Больше шансов мягко посадить дрон в случае отказа мотора.
- Недостатки: Больше моторов = более высокая цена и большой АКБ. Ввиду своей дороговизны актуален только для профессиональной сферы деятельности.

Размер бпла
Беспилотники бывают разных размеров, от «Нано», которые меньше ладони, до крупногабаритных, которые можно перевозить только в кузове грузовика. Для большинства пользователей, которые только начинают познавать беспилотное хобби, оптимальный диапазон размеров, предлагающих наибольшую универсальность и ценность, находится в пределах от 350мм до 700мм. Размером рамы является диаметр наибольшего круга пересекающего каждый из моторов. Запчасти для БПЛА таких размеров имеют широкий спектр цен и самый большой выбор доступных продуктов.

