

- Когда она будет срабатывать и что произойдет
- Apm параметры:
- Conditional commands¶
- Copter¶
- Editing and debugging mission planner (and other tips)¶
- Mav_cmd_do_set_roi¶
- Mav_cmd_nav_loiter_unlim¶
- Mav_cmd_nav_spline_waypoint¶
- Copter¶
- Mav_cmd_nav_waypoint¶
- Overview¶
- Types of commands¶
- Frames of reference¶
- Включение виртуального забора (fence) в mission planner
- Включение забора с помощью 7 или 8 каннала
- Данные с бортового журнала логов
- Защита от отказа наземной станции (failsafe ground control station)
- Защита отказа gps / gps failsafe
- Защита отказа аккумулятора / failsafe battery
- Защита отказа и ошибоки gps
- Как вызывать autotune
- Настройка loiter
- Настройка roll/pitch
- Настройка yaw (рысканье)
- Настройка в полете
- Настройка высоты
- Настройка приемника и полетного контроллера
- Обзор
- Предупреждения:
- Расширенная конфигурация и настройки
- Тестирование корректной работы срабатывания защиты дроссельного газа
- Техническип предпосылки и рекомендации по безопасности:
Когда она будет срабатывать и что произойдет
Если защита включена и настроена правильно, отказ дросельного газа сработает, если :
Когда сработает защита отказа дроссельной заслонки газа произойдёт одно из следуюх событий:
- Постановку на охрану двигателей (disarm) – если вы в режиме стабилизации стабилизации или Arcro и ваш дроссельный газ установлен в ноль.
- RTL – если у вас есть фиксация спутников GPS и квадрокоптер дальше 2 метров от вашего исходного положения
- Land – если у вас нет фиксации спутников GPS или квадрокоптер находиться в педелах 2 метров от дома, когда сработали команды защиты отказа
- Продолжение с миссией – если вы находитесь в режиме AUTO и установите режим FAILSAFE на “Enabled_continue_in_auto_mode”.
- Если защита от отказа отключается (заслонка дроссельного газа подымается обратно выше 975 PWM/ШИМ) квадрокоптер останется в текущем режиме полета.
Это не означает автоматический возврат в режим полета, который был активен до срабатывания защиты отказа (failsafe).
Это означает, что если вы летите в режиме стабилизации и когда срабатывается защита отказа по газу – это приводит к тому,
что режим полета меняется на RTL или LAND и если вы ходите взять управление над квадрокоптером вам необходимо
изменить полетный режим на переключателе в другое положение , а затем обратно в режим стабилизации.
Apm параметры:
- Полный список параметров
- Стандартный список параметров
Интерфейс командной строки (CLI) – для тех, кто не любит графических пользовательских интерфейсов
- CLI для радио и режим полета настройки, обзор тест
- CLI для тестирования ввода радио
- CLI для сброса содержимого EEPROM
Тестирование датчиков акселерометра и гироскопа вашего Ardupilot Mega
Conditional commands¶
Conditional commands control the execution of _DO_ commands. For
example, a conditional command can prevent DO commands executing based
on a time delay, until the vehicle is at a certain altitude, or at a
specified distance from the next target position.
A conditional command may not complete before reaching the next
waypoint. In this case, any unexecuted _DO_ commands associated with
the last waypoint will be skipped.
Copter¶
Fly to the target location using a Spline path, then
wait (hover) for specified time before proceeding to the next command.
Editing and debugging mission planner (and other tips)¶
Editing and debugging details are beyond the scope of this Wiki.
Debugging may result in some warnings. You should learn what they mean
and take the necessary steps to resolve them if that is the case. Here
is a simple debugging example to get you started.
Mav_cmd_do_set_roi¶
Supported by: Copter, Plane, Rover.
Sets the region of interest (ROI) for a sensor set or the vehicle
itself. This can then be used by the vehicles control system to control
the vehicle attitude and the attitude of various sensors such as
cameras.
Mav_cmd_nav_loiter_unlim¶
Supported by: Copter, Plane, Rover.
Loiter at the specified location for an unlimited amount of time.
Mav_cmd_nav_spline_waypoint¶
Supported by: Copter (not Plane or Rover).
Navigate to the target location using a spline path.
Copter¶
Fly to the target location using a Spline path, then
wait (hover) for specified time before proceeding to the next command.
The Spline commands take all the same arguments are regular waypoints
(lat, lon, alt, delay) but when executed the vehicle will fly smooth
paths (both vertically and horizontally) instead of straight lines.
Spline waypoints can be mixed with regular straight line waypoints as
shown in the screenshot below.
Command parameters
| Command Field | Mission Planner Field | Description |
|---|---|---|
| param1 | Delay | Hold time at target, in decimal seconds. |
| param2 | Empty | |
| param3 | Empty | |
| param4 | Empty | |
| param5 | Lat | Latitude/X of goal |
| param6 | Long | Longitude/Y of goal |
| param7 | Alt | Altitude/Z of goal |
The Mission Planner screenshot shows the path the vehicle will take.
- The 1 second delay at the end of Waypoint #1 causes the vehicle to
stop so Spline command #2 begins by taking a sharp 90degree turn - The direction of travel as the vehicle passes through Spline Waypoint
#3 is parallel to an imaginary line drawn between waypoints #2 and #4 - Waypoint #5 is a straight line so the vehicle lines itself up to
point towards waypoint #5 even before reaching waypoint #4.
Mav_cmd_nav_waypoint¶
Supported by: Copter, Plane, Rover.
Navigate to the specified position.
Overview¶
The MAVLink protocol defines a large number of
MAV_CMD
waypoint command types (sent in a MAVLink_mission_item_message).
ArduPilot implements handling for the subset of these commands and
command-parameters that are most relevant and meaningful for each of
the vehicles. Unsupported commands that are sent to a particular
autopilot will simply be dropped.
This article lists and describes the commands and command-parameters
that are supported on each of the vehicle types. Any parameter that is
“grey” is not supported by the autopilot and will be ignored. They are
still documented to make it clear which properties that are supported by
the MAV_CMD protocol
are not implemented by the vehicle.
Some commands and command-parameters are not implemented because they
are not relevant for particular vehicle types (for example
“MAV_CMD_NAV_TAKEOFF” command makes sense for Plane and Copter but
not Rover, and the pitch parameter only makes sense for Plane).
Types of commands¶
There are several different types of commands that can be used within
missions:
- Navigation commands are used to control the movement of the vehicle,
including takeoff, moving to and around waypoints, changing altitude,
and landing. - DO commands are for auxiliary functions and do not affect the
vehicle’s position (for example, setting the camera trigger distance,
or setting a servo value). - Condition commands are used to delay DO commands until some condition
is met, for example the UAV reaches a certain altitude or distance
from the waypoint.
During a mission at most one “Navigation” command and one “Do” or
“Condition” command can be running at one time. A typical mission might
set a waypoint (NAV command), add a CONDITION command that doesn’t
complete until a certain distance from the destination
(MAV_CMD_CONDITION_DISTANCE), and
then add a number of DO commands that are executed sequentially (for
example
MAV_CMD_DO_SET_CAM_TRIGG_DIST
to take pictures at regular intervals) when the condition completes.
Frames of reference¶
Many of the commands (in particular the NAV_ commands) include position/location
information. The information is provided relative to a particular “frame
of reference”, which is specified in the message’s Frames of reference field. Copter and Rover Mission use MAV_CMD_DO_SET_HOME command to set the
“home position” in the global coordinate frame (MAV_FRAME_GLOBAL),
WGS84 coordinate system, where
altitude is relative to mean sea level. All other commands use the
MAV_FRAME_GLOBAL_RELATIVE_ALT frame, which uses the same latitude
and longitude, but sets altitude as relative to the home position
(home altitude = 0).
Plane commands can additionally use MAV_FRAME_GLOBAL_TERRAIN_ALT
frame of reference. This again has the same WGS84 frame of reference for
latitude/Longitude, but specifies altitude relative to ground height (as
defined in a terrain database).
Включение виртуального забора (fence) в mission planner

Забор может быть настроен следущими действиями:
- Подключите APM к Mission Planner
- Перейдите в раздел Software -> GeoFence
- Нажмите кнопку “Enable”
- Оставьте “Type”, как “Altitude и Circle”
(если вы не хотите ограничиться высотой или только кругом – в этом случае выберите “Altitude” или “Circle” - Оставьте Action как “RTL или Land”
- Установите “Max Alt” до предела высоты которую вы хотите (в метрах)
- Установите “Max Radius” до максимального растояния от дома (как правило точки старта) которую вы ходитет (в метрах).
Как правило, это не менее 50 метров
Включение забора с помощью 7 или 8 каннала
Это необязательно, но для настройки включения или отключнения забора, если вы хотите контролировать аппарат переключением выполните следующие действия:
- В ПО Mission Planner -> APM ArduCopter PIDS установите на 7 или 8 канал значение “Fence”
- Переведением переключателя на аппаратуре в высокое положение (т.е. PWM/ШИМ больше 1800) включит “забор”, а низкое положение (ниже 1800) отключит его.

Данные с бортового журнала логов
ATUN (обзор автонастройки) и ATDE (детали автонастройки) – это те сообщения которые записываются в журнал полетного контроллера.
Некоторые поднопбности собержания этих сообщений можн онайти на странице анализа данных журнала
Защита от отказа наземной станции (failsafe ground control station)
В разделе Advanced Parametr List ПО Mission Planner установите FS_GCS_ENABLE параметр для:
- 0 – для отключения защиты отказа наземной станции
- 1 – для включения и всегда режим RTL в случае потери связи
- 2 – будет тоже переход в режим RTL, но если квадрокоптер до срабатывания защиты потери связи с наземной станцией был в режиме Auto – миссия продолжается (а по окончанию миссии идет возврат домой).
Если вы использовали наземную станцию для управления квадрокоптера (т.е. с помощью джойстика),
а затем потеряли управления с земли, то по истечении 5 секунд потери связи произойдет следующее:
- Команда “постановка на охрану” (disarm) – если вы были в режиме стабилизации или Acro и ваш дроссельный газ был на нуле
- Переключение в режим RTL – если у вас есть фиксация по спутникам GPS и вы более чем на 2 метра от вашего исходного положения
- Переключение в режим Land – если у вас нет фиксации по спутникам GPS или аппарат находится в пределах 2 метров от исходного положения
- Продолжение с миссией – если вы находились в режиме AUTO и установили параметр GCS Failsafe Option = 2 (Enabled_continue_in_auto_mode).
Когда защита отказа пропадает (когда восстанавливается контакт с наземной станцией) квадрокоптер останется в текущем режиме полета.
Он не будет автоматически переключен на тот режим, который был до срабатывания защиты отказа. Это означает , что если вы летите в
режиме стабилизации и у вас срабатывает защита отказа – это приведёт к тому, что режим полета измениться на RTL или Land и
если вы хотите повторно взять под контроль квадрокоптер вы должны будете вернуть режим полета стабилизации.
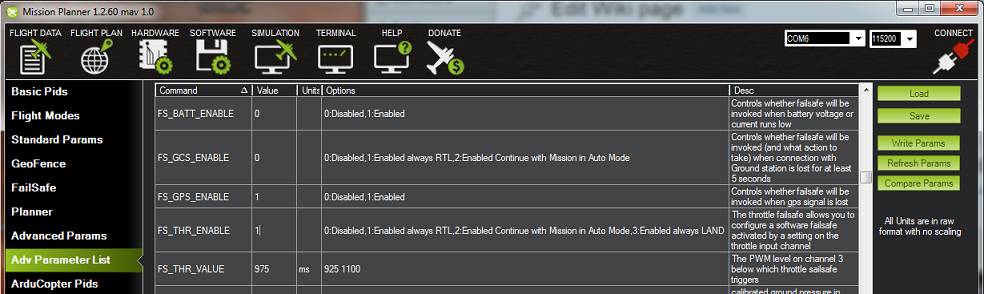
Обратите внимание: Все параметры защиты отказа можно наблюдать или установить в разделе Advanced Parametr List ПО Mission Planner
Защита отказа gps / gps failsafe
- Защита отказа GPS включена по умолчанию, но вы можете включить или отключить её на стандартный список параметров в Mission Planner
установив параметр FS_GPS_ENABLE в 0 (Disable) или 1 (Land) или 2 (перейти в режим AltHold). - Если вы потеряли фиксацию по спутникам GPS или GPS глюк в течении 5 секунд, который используется в GPS у режимов:
Auto, Guided, Loiter, RTL, Circle, Position или Drift он перейдет в режим Land (или AltHold если FS_GPS_ENABLE установлен в значение 2).

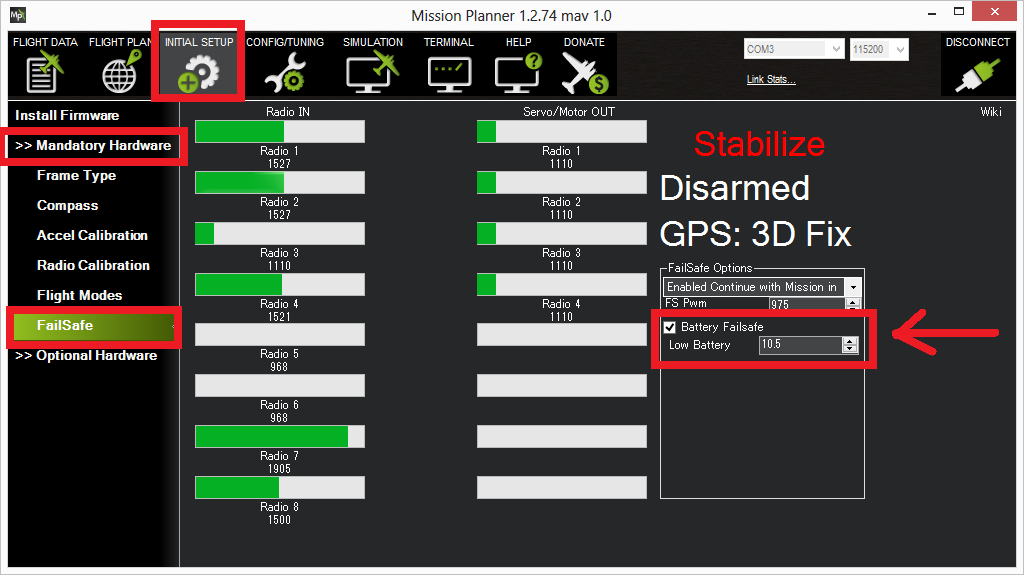
Защита отказа аккумулятора / failsafe battery
Если защита включена и правильно работает то она сработает если:
Когда защита срабатывает (failsafe) то срабатывает одно из следующих действий:
- Постановка на охрану (disarm) двигателей – если вы в режиме стабилизации или Acro и ваш дроссельный газ на нуле
- RTL – если вы находитесь в режиме AUTO и фиксацию по спутникам GPS, и не менее 2 метров от вашего исходного положения
- Посадка (Land) – во всех остальных случаях
Настройка защиты отказа батареи
Защита отказа и ошибоки gps
Как уже упоминалась на главной странице защиты отказа GPS . Защита отказа сработает, если фиксация по спутникам GPS пропадет или будут “глюки” позиции
в течении 5 секунд, пока квадрокоптер находиться в режиме, который требует GPS (RTL, Auto, Loiter, Circle, Position, Guided или Drift).
https://www.youtube.com/watch?v=whZkdqaGlK0
Без обновление информации от GPS инерционные датчики позволяют приблизительно 10 сенунт предоставлять точную информацию о положении,
но после этого дрейф горизонального положения становиться настолько большим, что горизонтальная позиция не может быть обеспечена.
Защита глюка GPS

Прошивка ArduCopter 3.1 и выше включает защиту от глюков GPS, которая может предупредить пилота о плохой позиции GPS и вызвать “защиту отказа” (failsafe)
и уменьшить случаи улета. Другие ошибки будут обнаружены путем сравнения каждого нового обновления местоположния полученых от GPS с положением проецируемого
из предыдущего положения обновления и скорости. Новое положение принимается как “хорошее” , если:
- Две позиции находятся в пределах GPSGLITCH_RADIUS (по умолчанию 5 метров)
- Новая позиция находиться в радиусе, который 10м/с/с (GLITCH_ACCEL) * dt * dt ; Где “dt” – разница во времени между двумя образцами
Во время сбоев на главное экране наземной станции (HUD) будет написано “Bad Glitch”
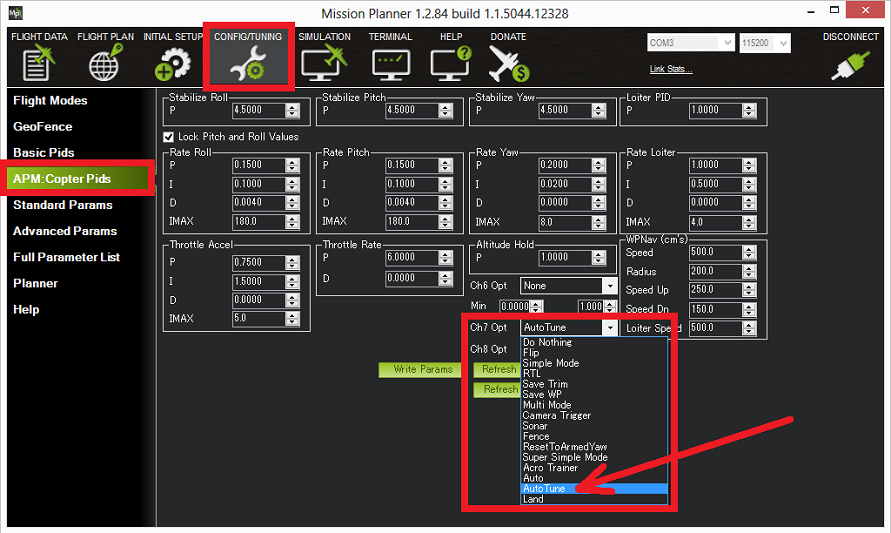
Как вызывать autotune
1. Настройке один из режимов полета на переключателе , что бы он был AltHold.
2. Установите один из допольнительных каналов (7 или 8) на функцию AutoTune в ПО Mission Planner.
Настройка loiter
Если крен и тангаж (наклоны по сторонам квадрокоптера) настроены правильно, GPS и Компас настроенны
правильно и уровень вибрации приемлемый, то настройка Loiter не требуется, но пожалйста посетите страницу полетного режима Loiter для
дополнительной информации по настройкам включая горизонтальную скорость.
Настройка roll/pitch
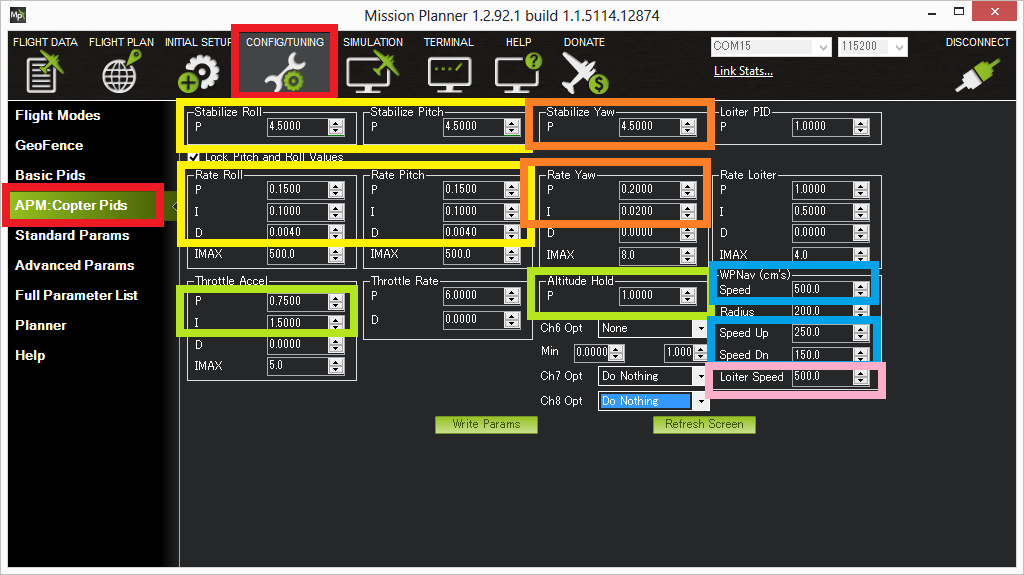
Параметры Stabilize Roll/Pitch и Rate Roll/Pitch выделеные желтым цветом на снимке управляют отзывчивостью крена и тангажа.
Параметр Rate преобразует желаемую скорость вращения в соответствии с мощностью двигателя является наиболее важным. Наибольшая
информация о настройке их находиться здесь здесь
Параметр Stabilize Roll/Pitch P преобразует нужный угол в требуемую скорость вращения, которая меняется контролем скорости.
- Чем выше это значение, тем сильнее квадрокоптер реагирует на наклоны по крену и тангажу, более низкое – сделает реагирование более гладким
- Если установлено слишком большое значение – квадрокоптер будет колебаться по осям крена и тангажа (roll / pitch)
- Если установлено слишком малое значение – квадрокотпер будет вялым на входящие команды
Более подробная информация по настройке крена и такгажа можно найти в разделе Stabilize Roll/Pitch настройки
Объективный взгляд на общий Roll и Pitch производительность можно увидеть посмотрев график из логов полетного контроллера в ATT сообщениях.
сопоставив значения на графике Roll-In vs Roll и Pitch-In vs Pitch . Оба графика должны следовать друг за другом в режиме Stabilize и в режиме AltHold.
Как альтернативу вы можете попробовать использовать автонастройку Stabilize и Rate c с помощью AutoTune
Настройка yaw (рысканье)
Параметры Stabilize Yaw и Rate Yaw выделены на скриншоте выше оранжевым цветом и отвечают за отклик рысканья (поворот носом).
Редко, когда эти параметры требуют настройки.
Подобно крену и тангажу, если параметры Stabilize Yaw P или Rate Yaw P слишком высокие – нос квадрокоптера будет колебаться, а если он
слишком низкий – квадрокоптер будет не в состоянии поддерживать направление носа.
Как уже упоминалось в разделе режима Stabilize , параметр ACTO_YAW_P отвечает
как быстро вертолет будет вращаться на основе команд рысканья пилотом. По умолчани это 4.5 – то есть скорость вращения
200 градусов в секунду, когда стик рысканья полностью утоплен влево или вправо. Большее значение сделают вращения быстрее.
Настройка в полете
Одиночный параметр может быть настроен в полете с помощью 6-го канала на аппаратуре. Для примера можно настроить
Rate Roll/Pitch P значния , найденые на странице Настройка Rate Roll/Pitch P раздела “настройка в полете”.
Пожалуйста посмотрите в ПО Mission Planner в разделе Config/Tuning -> APM Copter PIDS полный список параметров назначаемых на 6-й канал
которые могут быть настроены.
После установки значения на 6-й канал , его показания минимума и максимума должны быть в разумных пределах ( то есть не нулевой , а так же неоправданно большой),
а затем нажмите кнопку “Refresh screen” убедитесь, что путем настройки регулятора 6-го канала параметр правильно обновляется.
Настройка высоты
Параметры связанные с удержанием высоты выделены зеленым цветом на скриншоте выше.
Параметр Altitude Hold P используется для конвертирования ошибок высоты (разница между заданной и фактической высотой)
до набора или снижения желаемой высоты. Чем выше этот коэффициет тем более агресивно пытается поддерживаться эта высота,
если слишком большой коэффициет – это приводит к рывкам дросельной заслонки.
Параметр Throttle Rate (который обычно не требует настройки) преобразует коэффициент подъема или спуска до нужного ускорения вверх или вниз.
Параметры Throttle Accel PID добавляют преобразованые ошибки ускорения (то есть разница между желаемым и фактическим ускорением) на выходе у моторов.
Придерживайтесь соотношению 1 к 2 (P к I) (т.е. I в два раза выше P) , если вы меняете эти параметры.
Смотрите страницу режима удержания высоты (AltHold) для получения дополнительной информации.
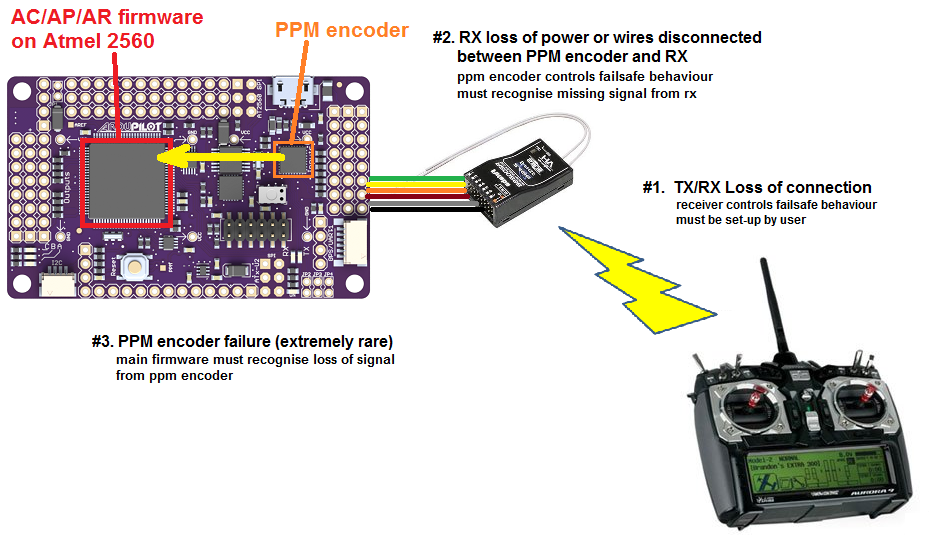
Настройка приемника и полетного контроллера
Настройки приемника:
- Каждый производитель передатчиков и приемников имеют свои методы создания защиты отказа,
но не все очень дешевые бренды позволяют установить защиту на отказ. Пожалуйста , обратитесь
к руководству пользователя вашего передатчика для подробной информации о том,
как включить защиту отказа (Failsafe). Ниже приведены видео показывающее настройку:
Обзор
По умолчанию PID усиления предназначены для квадрокоптеров 3DR , хотя они работают на самых разных рамах.
Тем не менее, что бы получить оптимальную производительность может потребоваться их настройка , которая
может быть сделана через Mission Planner ->
Наиболее важным параметрами являются правые – Rate Roll P (и по умолчанию Rate Pitch P заблокирован с тем же значением).
как обсуждалось здесь
Обычно лучше всего начинать с настройки коэффициента Roll/Pitch P в режиме стабилизиции, затем перейти на настройки
удержания высоты в режиме AltHold , затем Loiter (который часто не нуждается в настройке) и последнее –
настройки производительности полета по навигационным точкам в режиме Auto.
Примечание:Руководство полезной информации с прошивкой ArduCopter версии 2.8.1
настройки этих параметров после версии 2.8.1 очень сильно изменились.
Предупреждения:
- Минимальный рекомендуемый радиус забора 30 метров.
- Для достижения наилучших результатов убедитесь, что RTL работает на вашем квадрокоптера.
- При включенном “заборе” предполетная проверка (pre-arm check) проверяет фиксацию по спутником GPS квадрокоптера, перед снятием с охраны (arming).
- Если у GPS отключена защита отказа (failsafe disable) и включен забор и вы теряете фиксацию по спутникам (3d fix) во время полета – забор будет отключен.
- Если у GPS включена защита отказа (failsafe enable) и включен забор (GeoFence enabled) и вы потеряли фиксацию по спутникам GPS во время полета –
квадрокоптер переключиться в режим посадки (LAND) потому , что мы больше не знаем позицию аппарата и мы хотим быть уверены, что
квадрокоптер никогда не путешествует далеко за пределами забора. Это поведение произойдёт независимот от режима полета. Если команда посадки (Land)
не требуется – пилот может вернуть контроль перемещая переключатель режимов полета. - Резервные заборы создаются в 20 метрах от предыдущего нарушенного забора исходя из положения квадрокоптера.
Это означает, что если вы решите переопределить забор у вас будет не больше 20 метров, что бы
восстановить контроль над квадрокоптером, прежде чем он переключится в режим RTL или Land снова. Если вы
действительно хотите переопределить забор вы должны быть готовы, что бы переключить режим полета дважды или же
настроить включение и выключение забора.
Расширенная конфигурация и настройки
Эти разделы дадут вам информацию более продвинутых настройках и оптимизации Ardpupilot конфигурации ArduCopter
Установка компаса (расширенная) – объяснения всех процедур настройки.
FailSafes – защита от потери:
Fence – защита от улетов
Информация по PPM энкодеру
- Общая информация о PPM энкодеру
- Обновление прошивки PPM энкодера вашего APM – если вы купили свой APM до марта 2023
- Обновление прошивки PPM энкодера вашего APM часть вторая – та же информация, что и выше
- Использование автономного PPM энкодер
Функции 7 и 8 каналов – функции , которые могут быть использованы переключателями 7 и 8 каналов аппаратуры.
Тюнинг – главное руководство по настройке для ArduPilot конфигурации ArduCopter
Тестирование корректной работы срабатывания защиты дроссельного газа
Вы можете проверить срабатывание защиты отказа выполнив следующие тесты с APM. Подключите Mission Planner
c сопощью USB кабеля или телеметрической связью. Вы можете провести испытания без LiPo батареи,
но если вы её подключите – следует сначала удалить пропеллеры.
Тест № 1: поможем сделать падение канала газа при потери радиосвязи
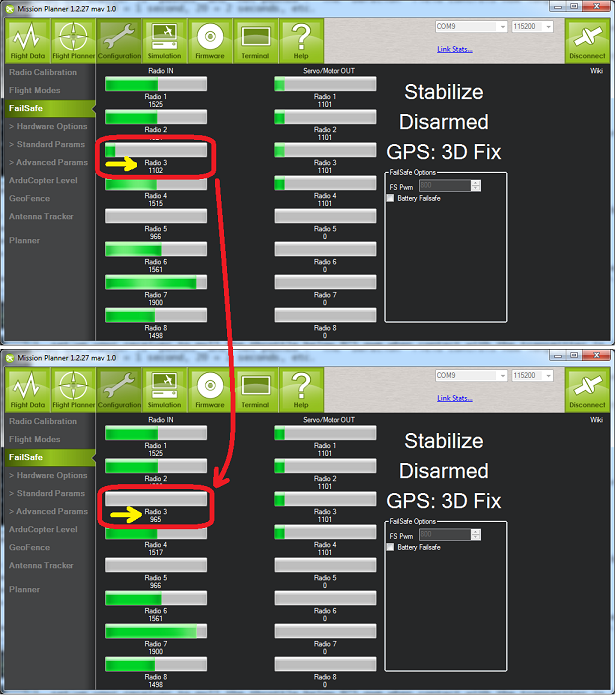
Убедитесь, что ваш радиопередатчик аппаратуры включен и подключен с газом на нуле в режиме полета стабилизации
Значение PWM дроссельной заслонки (3 канала) должно быть примерно как в первом рисунке ниже.
Это значение может быть выше или ниже, но это определенно должно быть не менее 10 PWM выше, чем значение в области PWM FS
Выключите передатчик и показание значении дросельной заслонки PWM должна снизиться ниже по крайней мере ниже на 10 PWM чем значение PWM FS, как во втором рисунке ниже
Тест № 2: обеспечение постановки на охрану двигателей (disarm) в режиме стабилизации или Acro с дросселем газа в нуле
Переключитесь в режим стабилизации , снимите с охраны свои двигатели (arming) но сохраняйте уровень газа на нуле.
Выключите передатчик. Двигатели должны немедленно встать на охрану (disarm) (красный светодиод на плате полетного контроллера начнет мигать,
постановка на охрану будет отображаться на экране ПО Mission Planner)
Тест № 3: обеспечение изменения полетного режима до RTL или Land, когда дроссель ниже нуля
Переключитесь в режим стабилизации , вооружите свои двигатели и поднимите дроссельный газ до середины. Выключите передатчик.
Полетный режим должен перейти на RTL, если у вас есть фиксация по спутникам или режим Land , если вы не имеете фиксацию по спутникам GPS.
(режим полета и состоянии фиксации спутников можно увидеть в экране ПО Missio Planner)
Тест № 4: взять контроль после срабатывания защиты отказа газа
продолжение следует…
Техническип предпосылки и рекомендации по безопасности:
Система навигации GPS не предназначена в качестве основной системы навигации и сигналов отсева или неточных позиций (так называемые “глюки”)
происходят время от времени, даже при ясном небе.
Особенно важно избежать полеты внутри помещений, между зданий, горами или во дворах из-за отражения GPS сигнала которые приводят к большим ошибкам GPS.
Для избежания ошибок позиционирования летайте под чистым небом.
Для получения хороших результатов и безопасности рекомендуется , что бы вы проверили качество сигнала GPS и бюллетеней для вашего региона перед вылетом.
Проверьте эти разделы для конкретной информации GPS:

 (LiPo) - 94182PRO")





