

- Ui клиента
- Гребневые (не резиновые) моторные лодки до 100 кг
- Датчики
- Зачем?
- Какой должна быть лодка?
- Катер на arduino с радиоуправлением своими руками
- Корпус для электроники
- Лодки резиновые надувные гребные до 100 кг
- Модель катера на arduino с радиоуправлением
- Немного теории и материалов
- Необходимые материалы
- Окончательная сборка лодки
- Первый спуск на воду
- Примеры декларирования по данному коду
- Проверка водонепроницаемости и тесты
- Провода к двигателям
- Прототип дистанционного управления 1.0
- Прототип дистанционного управления 2.0
- Решения по классификации товаров по данному коду
- Скрепление бутылок
- Суда и лодки массой от 100 кг и длинной 6 метров
- Схемы для различных датчиков
- Также могут потребоваться следующие документы
- Тестирование дальности приёма
- Установка двигателей в крышки от бутылок
- Электронная часть
- Итоги
Ui клиента
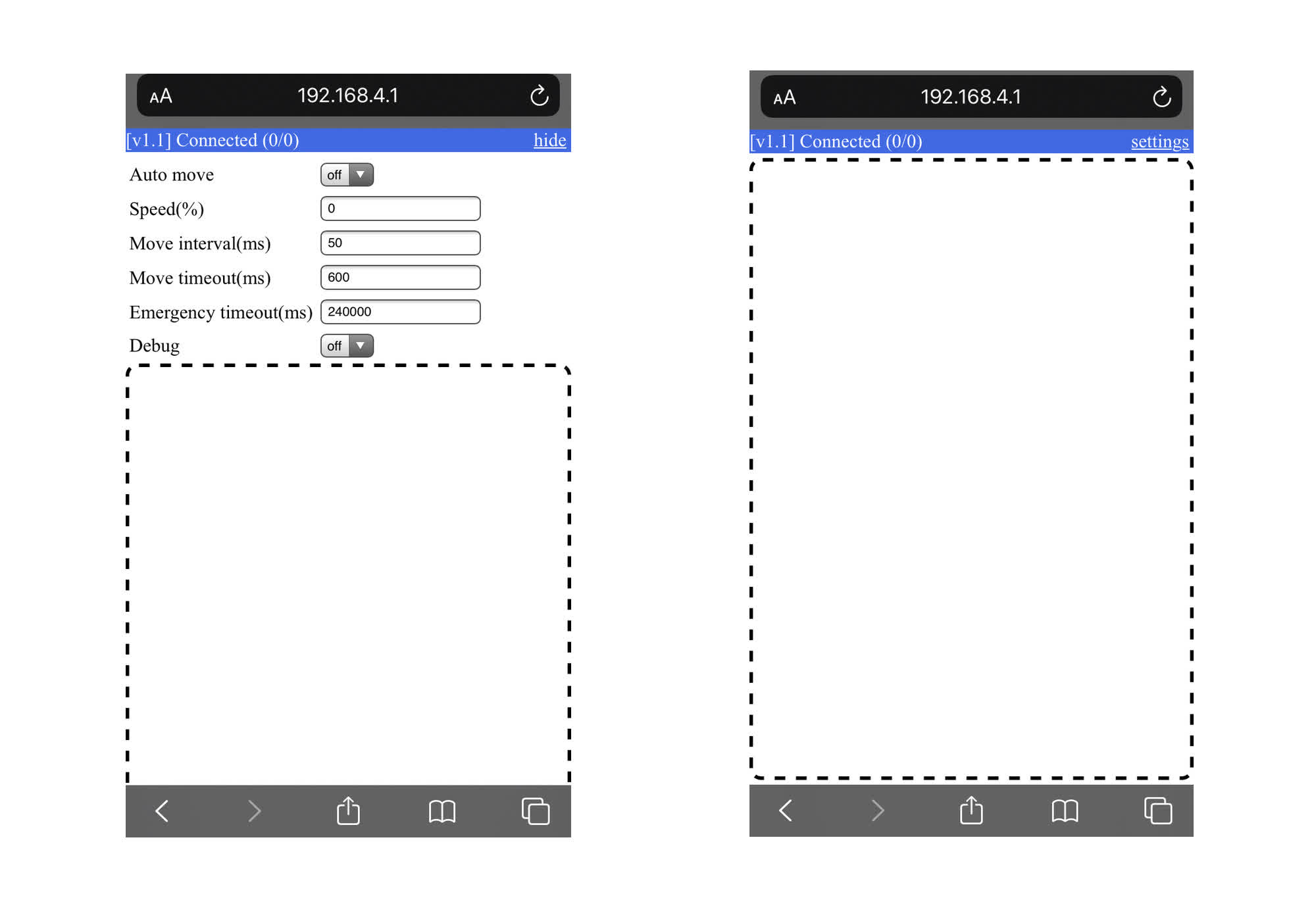
При свёрнутом меню настроек для управления доступна почти вся область экрана
Настройки:
- Auto move (on/off) — во включённом состоянии скорость не регулируется и задаётся в параметре Speed.
- Speed (%) — используется в связке с параметром Auto move.
- Move interval (ms) — интервал, через который будут отправляться команды с клиента. Мы не можем отправлять команды очень редко: тогда управление лодки будет происходить с большой задержкой. Очень маленькую задержку мы ставить тоже не можем, потому что контроллер не будет успевать обрабатывать запросы. По умолчанию — 50 миллисекунд.
- Move timeout (ms) — интервал, через который лодка поймёт, что новые команды ей больше не приходят. Некоторые команды доходят до контроллера с задержкой, то есть между командами есть паузы больше, чем в параметре Move interval. Чтобы движение при этом оставалось плавным, был введён параметр Move timeout. Лодка будет выполнять последнюю команду Move timeout миллисекунд. По умолчанию — 600 миллисекунд.
- Emergency timeout (ms) — если за таймаут не приходят команды, то лодка начинает неспешно двигаться вперёд. По умолчанию — 4 минуты.
- Debug (on/off) — включение дебага, при котором отображаются подробные ошибки подключения и все команды.
Все таймауты отправляются серверу в каждой команде, поэтому настроить их можно в любой момент.
Управление направлением
Управление скоростью
Гребневые (не резиновые) моторные лодки до 100 кг
Гребные лодки (не резиновые) до 100 кг не подлежат обязательной сертификации. Моторные то же самое (но вес считается вместе с мотором наибольшей мощности).
В этом случае можно оформить либо добровольный сертификат соответствия в системе ГОСТ Р для повышения конкурентоспособности товара на рынке, повышения доверия покупателей и расширения рынка сбыта продукции, либо отказное письмо, свидетельствующее о том, что продукция не подлежит обязательной сертификации.
Этот сертификат оформляется на бланке государственного образца, его можно оформить на срок до 3 лет. Срок оформления составит несколько рабочих дней.
Датчики
Проявите творческий подход! Если вам не нужны все датчики, то оставьте только необходимые.
Ультразвуковой дальномер Ping от Parallax прекрасно работает на передней части лодки и показывает наличие препятствия на пути. Фотоэлементы могут действовать как антенны, если вы хотите лодку, которая плывет на свет. Две кнопки по бокам лодки используются как датчик препятствия. Вы можете модифицировать код и использовать другие, например ИК датчики.
Зачем?
Ещё с детства у меня было особое желание собрать модель на дистанционном управлении.Неважно, какую. Главное — собрать самому.
После знакомства с Arduino я начал смотреть другие контроллеры и наткнулся на ESP8266 NodeMCU. Прочитал про него и понял, что на его основе смогу осуществить задуманное.
Дело было в марте. У моего друга день рождения летом, и я решил, что за такой большой срок точно успею собрать лодку и подарить ему (спойлер: я опоздал на месяц).Он любитель рек и озёр, так что выбор водного транспортного средства в качестве модели был очевиден.
Какой должна быть лодка?
Итак, я решил сделать лодку на дистанционном управлении.
Как я представлял себе готовую модель
Электронные компоненты:
Материалы:
Управлять лодкой я хотел со смартфона: удобно, ведь он всегда заряжен и под рукой.
Катер на arduino с радиоуправлением своими руками
Корпус для электроники
Приклейте пластиковую коробку на бутылки. Сделайте на боку коробки отверстие для проводов от двигателей. После этого, заклейте щели сделанные в бутылках термоклеем для герметичности.
Лодки резиновые надувные гребные до 100 кг
Лодки резиновые надувные гребные до 100 кг подлежат обязательному декларированию о соответствии в системе ГОСТ Р согласно Постановлению Правительства РФ от 01.12.2009 N 982. Оформление этого документа обязательно для законной деятельности в сфере производства и продажи продуктов.
Декларацию ГОСТ Р можно оформить на срок до 5 лет. В этом случае тоже можно в дополнение оформить добровольный сертификат, но только лишь на основании обязательной декларации ГОСТ Р.
Если у Вас еще остались вопросы или Вы не хотите самостоятельно вникать во все тонкости оформления, я с удовольствием помогу Вам разобраться!
Сертификация лодок может проводиться в обязательном или добровольном порядке.
Обязательная процедура предусмотрена для лодок, конструкция, вес и габариты которых перечислены в ТР ТС 026/2023. Также обязательной оценке в форме декларирования подлежат лодки, указанные в ПП РФ № 982.
Добровольная сертификация проводится в отношении любых лодок с целью подтверждения их соответствия требованиям НТД.
Чтобы получить сертификат, вам нужно предоставить:
- заверенные сканы ОГРН, ИНН;
- сведения о лодках – данные о конструкции, габаритах, материале изготовления, особенностях эксплуатации, коды ТН ВЭД;
- сертификат СМК (при наличии).
- сведения о производителе;
- инвойс для импортных товаров, договор на поставку.
Модель катера на arduino с радиоуправлением
Немного теории и материалов
Прежде чем перейти непосредственно к тексту про создание лодки, я должен вкратце рассказать, из чего она состоит.

Картинка взята тут
Основные части, про которые я буду говорить, выделены синим цветом:1 — перо руля/руль,2 — винт,3 — дейдвуд,4 — тут должна быть муфта,5 — мотор.
Основные материалы, которыми я вдохновлялся и пользовался
Книги:
Больше всего нужного мне материла я нашёл в книге John Finch. “Advanced R/C boat modeling”. Смотрел и другие, но зашла именно эта.
Cтатьи:
Видеокурс как сделать ракетный катер
Необходимые материалы
Клейкая лентаТермоклей и термопистолетДва небольших двигателя постоянного токаДве бутылки от водыПроводаДва небольших пропеллераArduino USB кабель компьютерПластиковая коробка9В батарея и разъемМощные диоды (например, 1N4004)
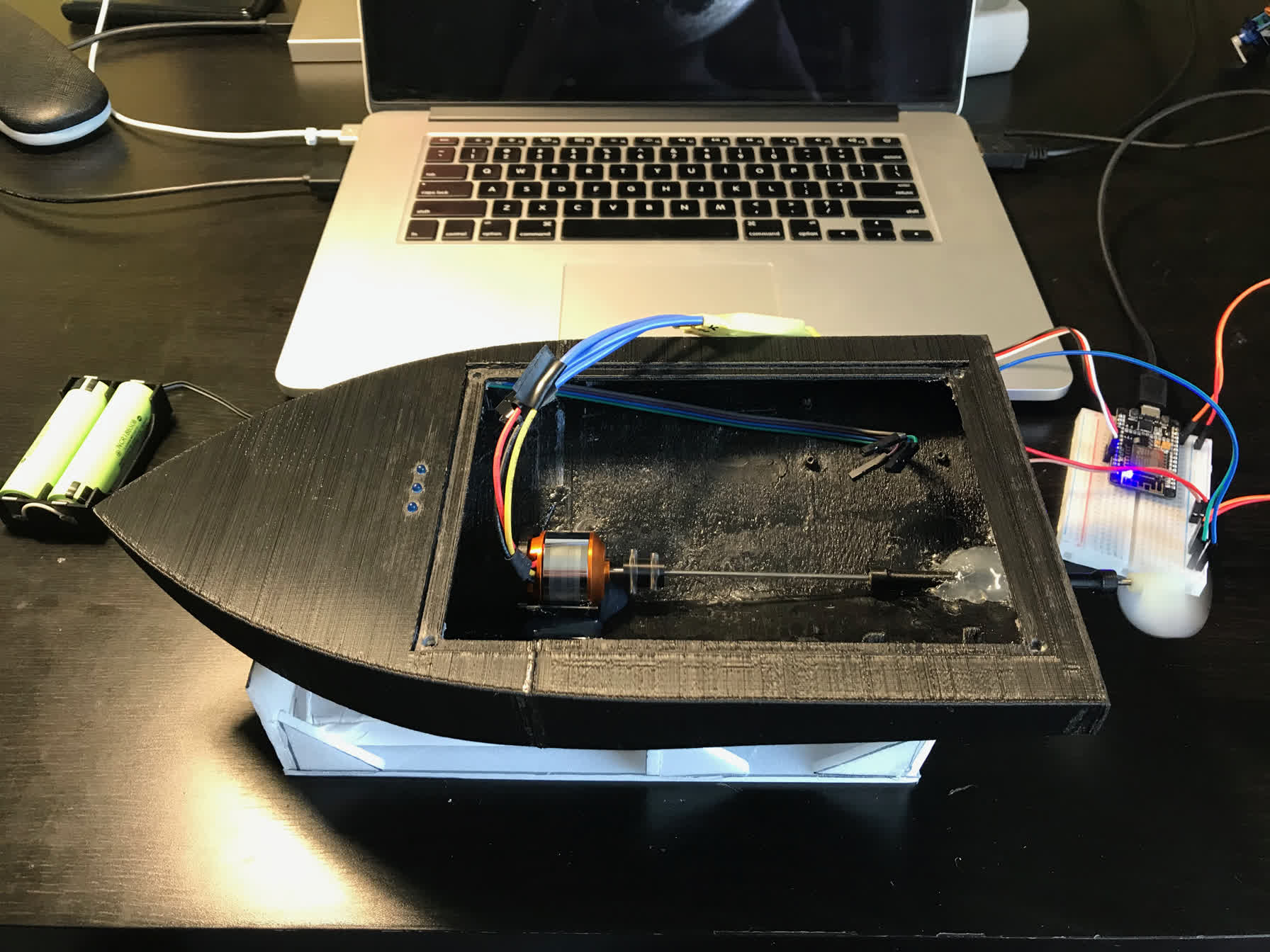
Окончательная сборка лодки
Установите вашу схему, Arduino и батареи в коробку и закройте её.
Откройте Arduino IDE. Выберите правильный файл и порт. Скомпилируйте и загрузите код в контроллер.
Первый спуск на воду
К сожалению, я выбрал самый близкий, но очень заросший пруд.Проплыв всего полтора метра, лодка намотала водоросли на вал винта и перестала слушаться управления.
Спустя десять минут, используя несколько веток, склеенных скотчем в одну большую, мы смогли достать пострадавшую из воды.Вот первые фото лодки, но уже после того заплыва:

Не самый чистый пруд Питера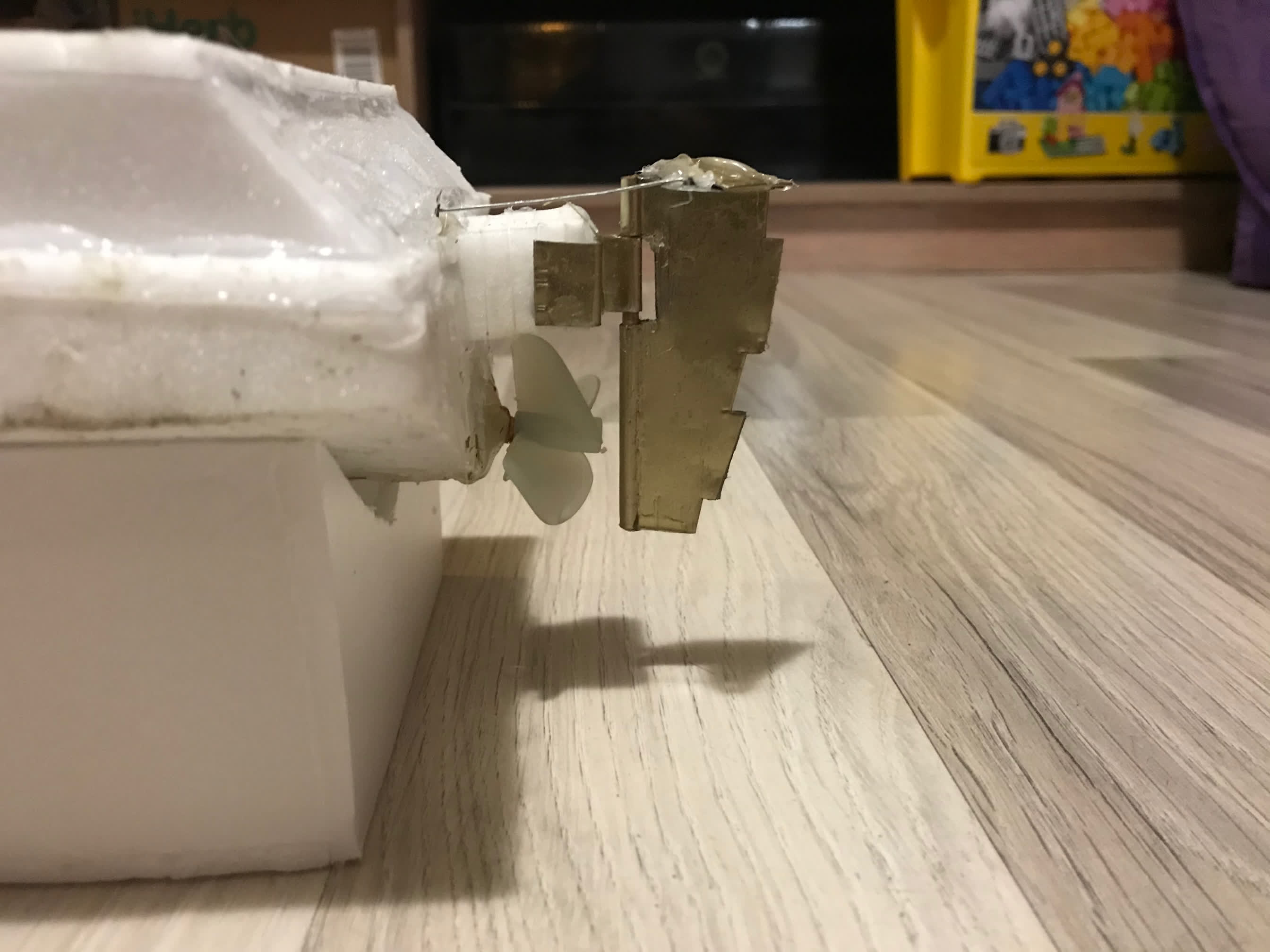
Хорошо видно, как расположены руль и винт
Видно, как водоросли намотались на вал
Лодка всё ещё немного протекала, поэтому пришлось искать место течи.

Cинюю жижицу отлично видно на белом фоне
Версия 1.2Особенности версии:

Очищенная от грязи лодка выглядит намного лучше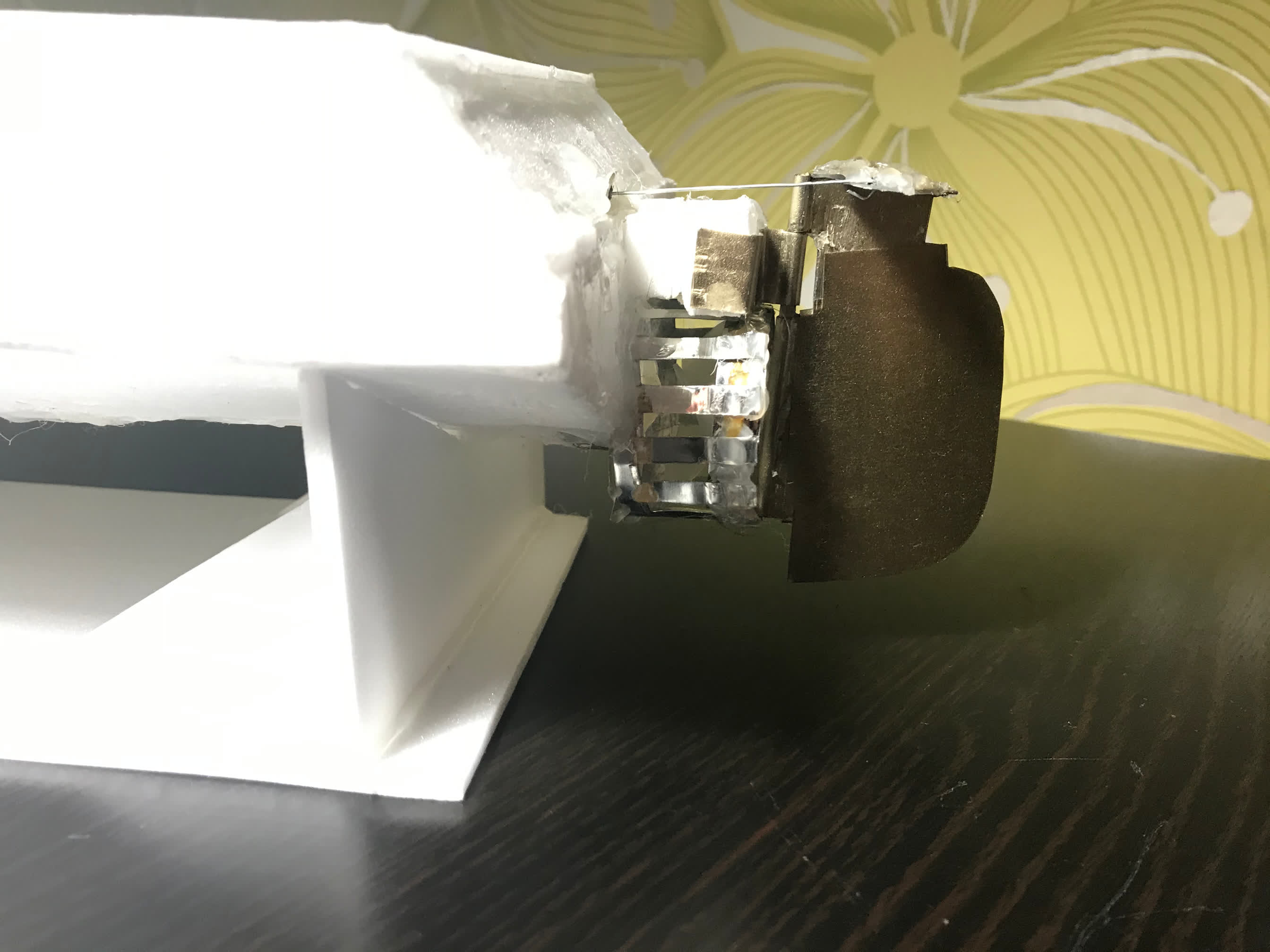
Увеличена площадь руля
Добавлена защита от водорослей
Первый удачный спуск на воду:
Версия 1.3Особенности версии:
Внезапно я понял, что на лодку уйдет много пластика, поэтому решил сделать её немного короче.Чтобы посмотреть, как будет выглядеть укороченная версия, переделал уже имеющийся корпус.
Версия 2.0Электронные компоненты:
Материалы:
Особенности версии:
Приехал 3D-принтер!

Посылка из Китая пришла в отличном состоянии
Процесс сборки затянулся примерно на 6 часов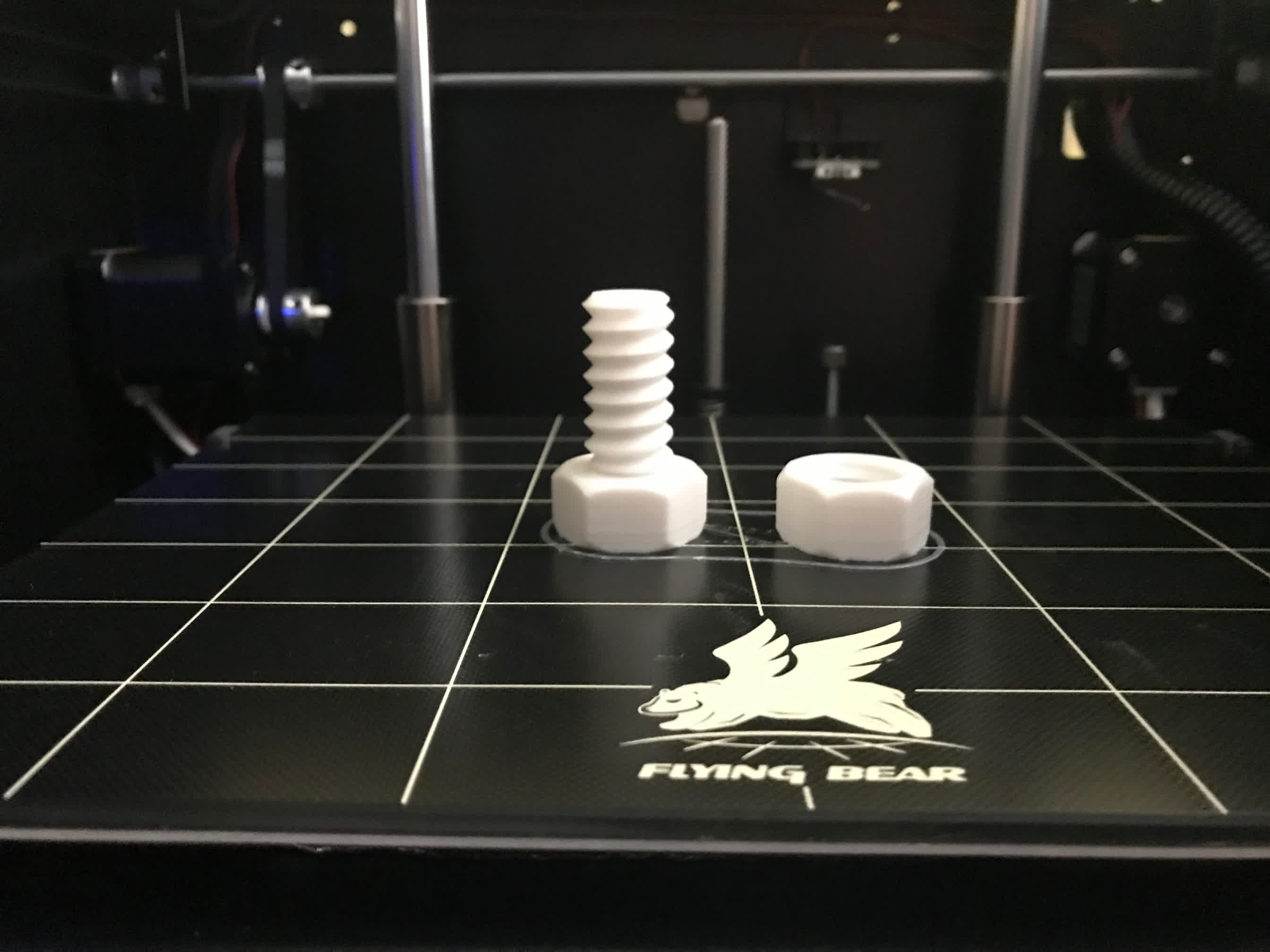
Пробная печать
Печать дейдвуда и муфты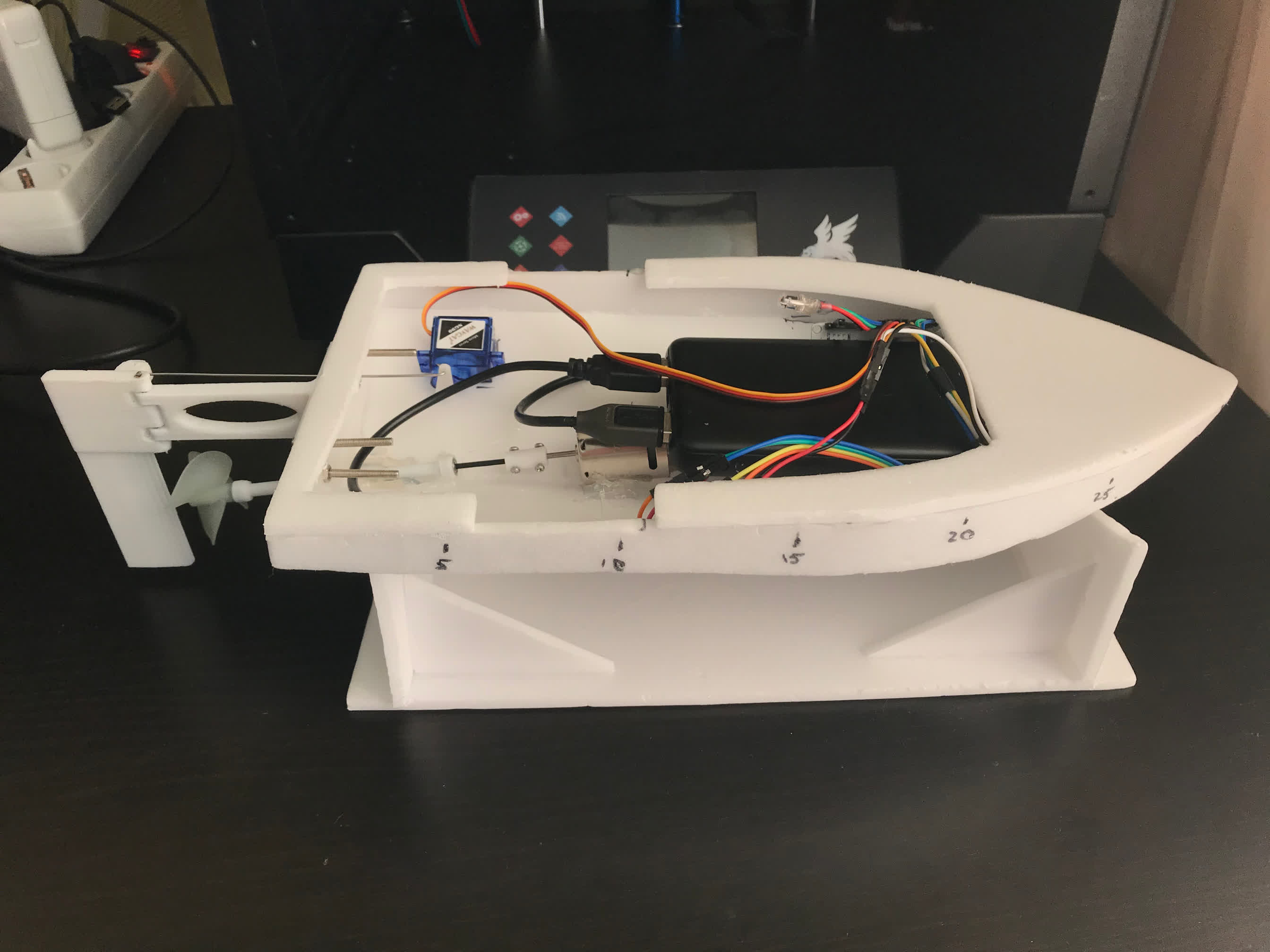
Новый корпус выглядел аккуратно
Отлично работает!
Но было непонятно, что делать с отверстием, в которое попадает вода:
Версия 3.0Электронные компоненты:
Материалы:
Особенности версии:
До этого работал только в Компас 3D для моделирования несложных моделей, но принципы во Fusion360 примерно те же.Пришлось несколько выходных позаниматься, чтобы понять, как оптимально строить такие модели.Спустя пару недель первая пригодная версия модели корпуса лодки была готова!
Разделил корпус на несколько частей и начал печатать.Не особо разбирался с настройками печати, поэтому качество не очень.

Нос лодки
Корма лодки
Верх лодки
Процесс сборки корпуса
Готовый корпус
Также смоделировал и распечатал руль.Решил проблему с отверстием для управления пером руля (видно на фото). В результате вода почти перестала попадать через него внутрь лодки.

Одна из финальных версий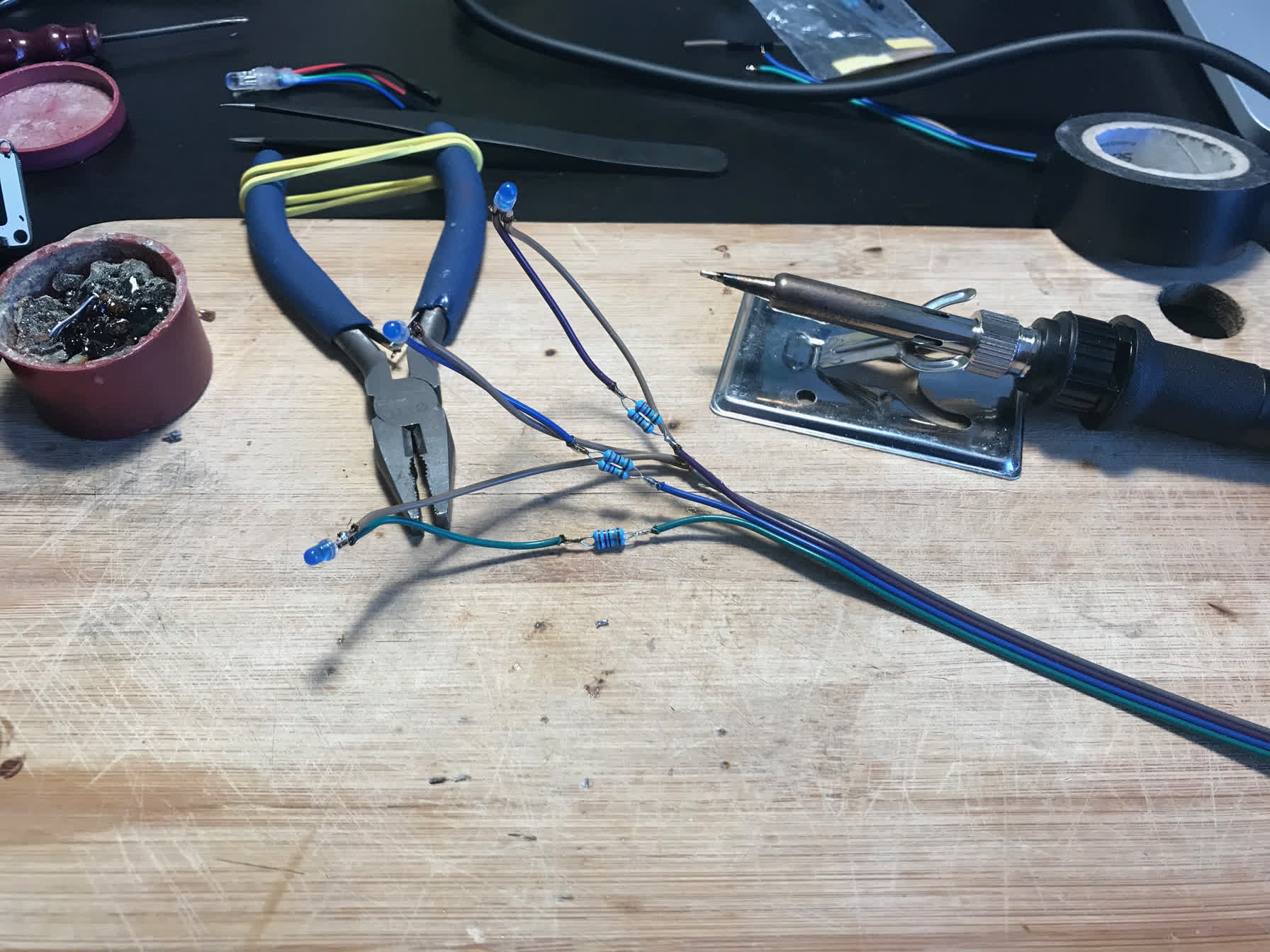
Один трёхцветный светодиод заменил на 3 разных
Новый мотор периодически не включался с первого раза, и это ооочень раздражало и расстраивало.Решил, что это опять связано с мощностью питательного элемента (powerbank), поэтому экспериментировал с обычными батарейками АА. С ними вроде стало получше.

Эксперимент с батарейками AA
Внезапно понял, что, скорее всего, у меня в powerbank’е стоит несколько аккумуляторов и я могу их соединить так, как нужно мне.Разобрал powerbank иии… нет, там всего один элемент…
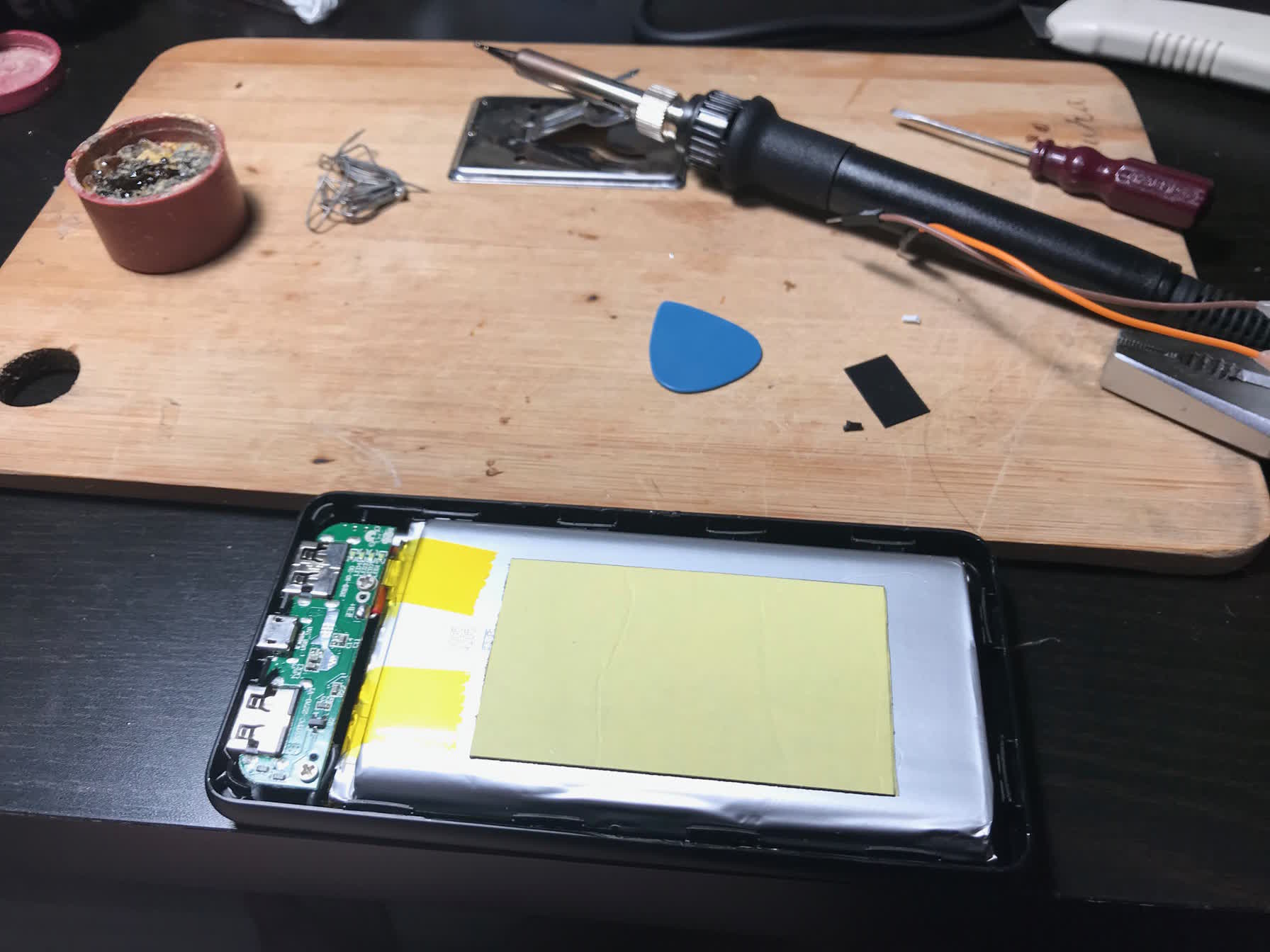
Всего один элемент в powerbank
Решил, что нужно заказать аккумуляторы.
Версия 3.1Особенности версии:
Наконец-то!
Отсеки для новых аккумуляторов: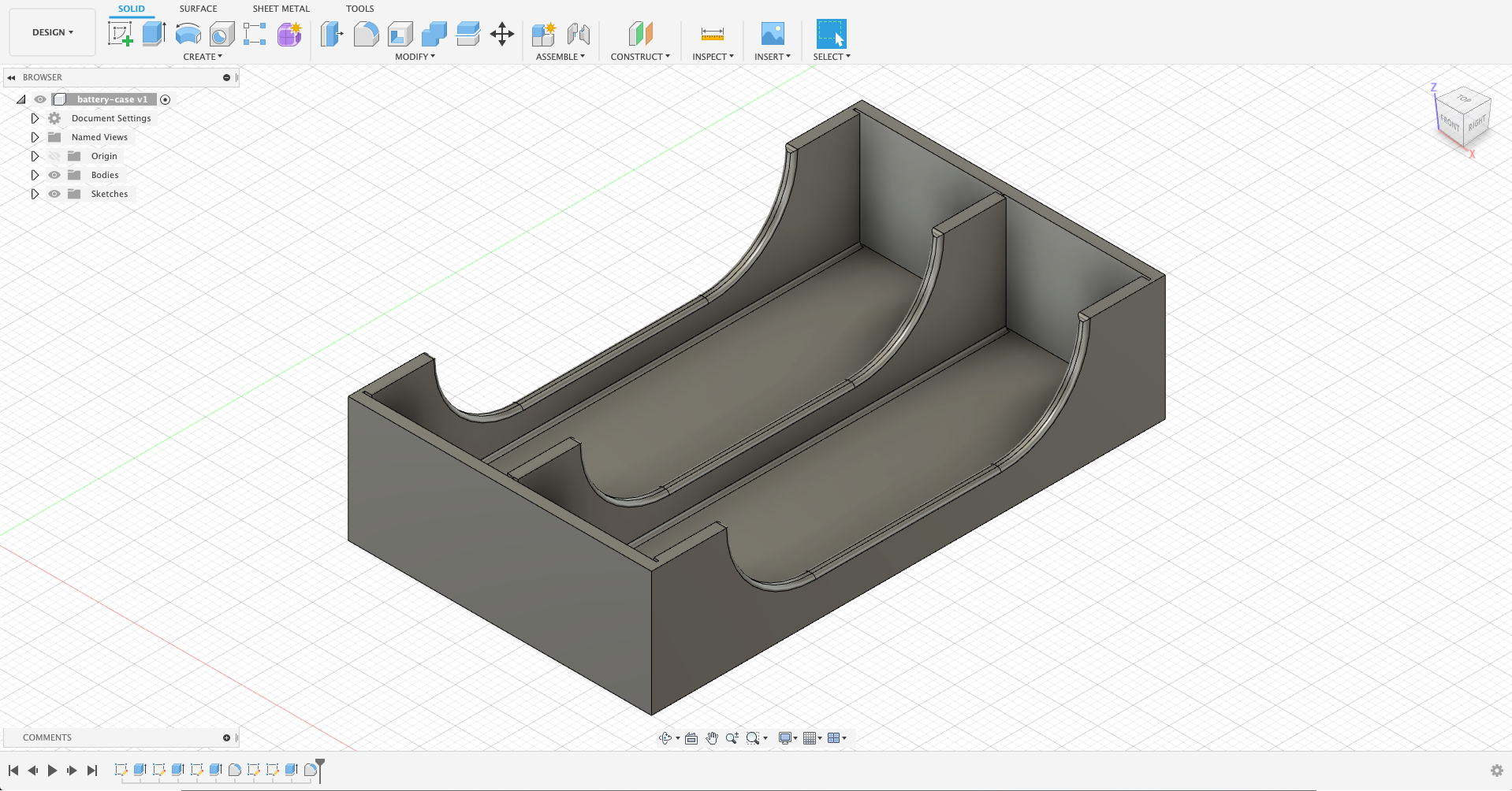
Контакты по-прежнему из консервных банок
Отсеки вклеены в лодку
Версия 3.2Особенности версии:
Нельзя просто так взять и заменить уже вклеенный дейдвуд
Версия 3.3Особенности версии:
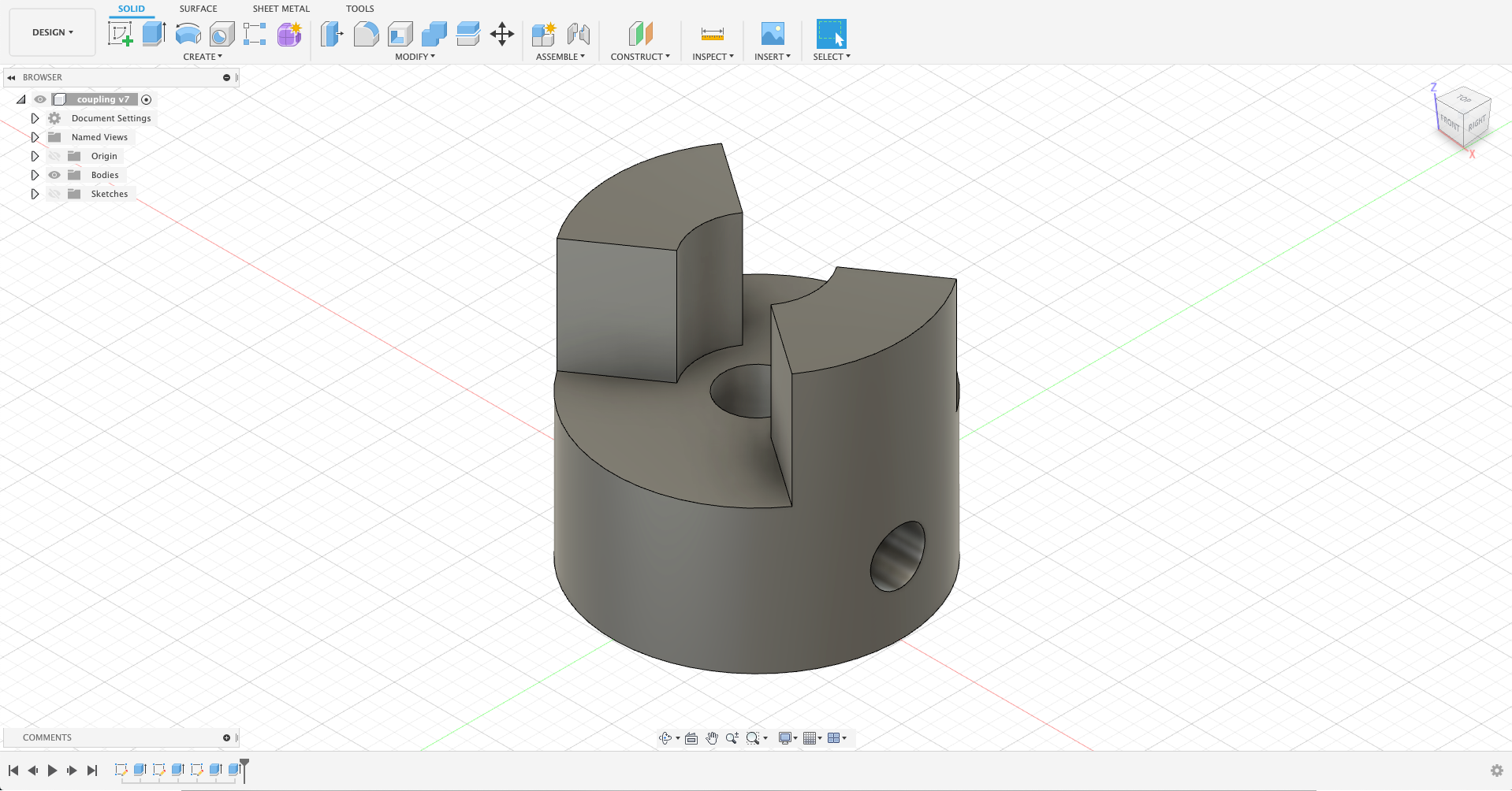
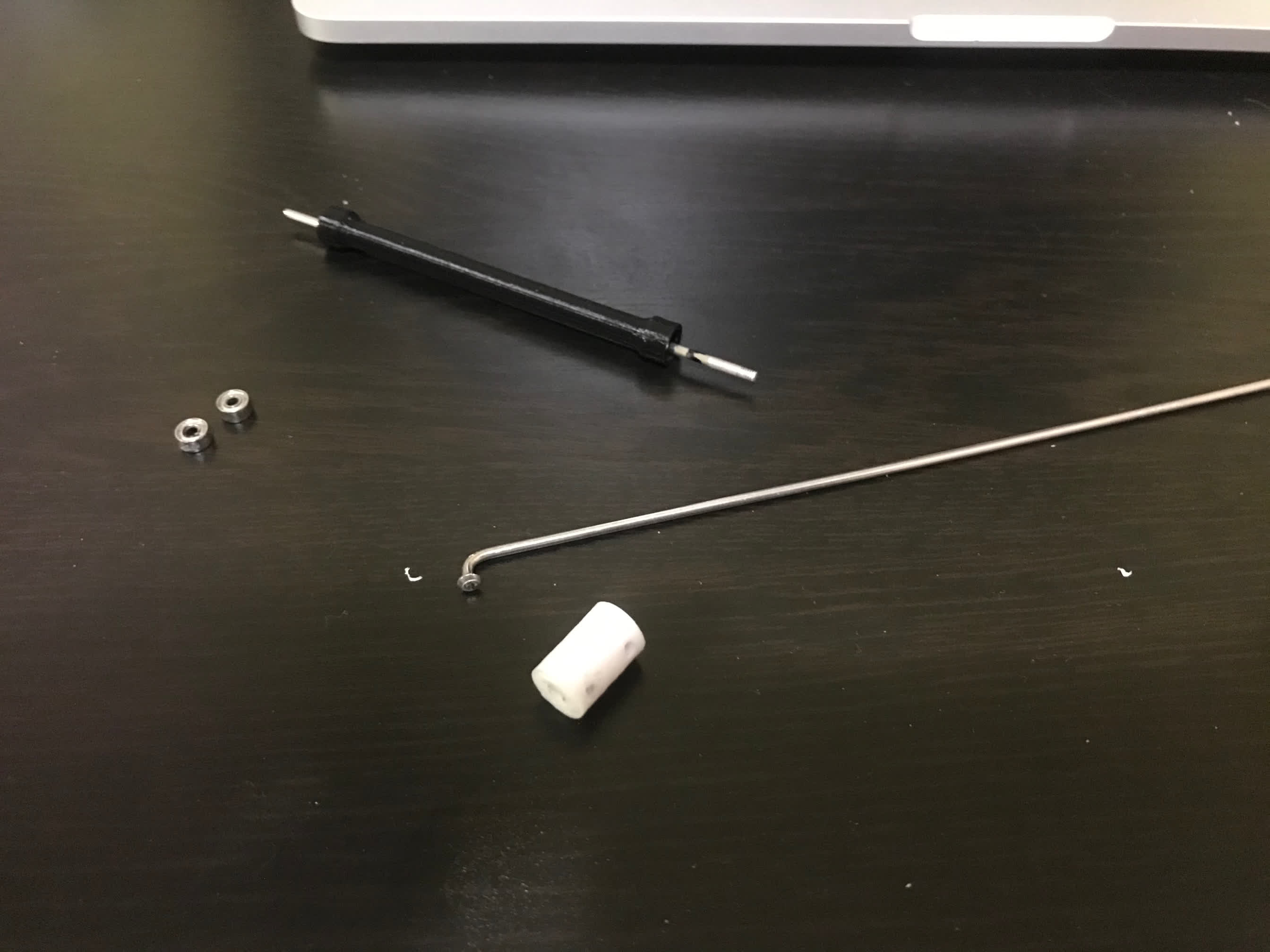
Часть гибкой муфты
Полный комплект новой версии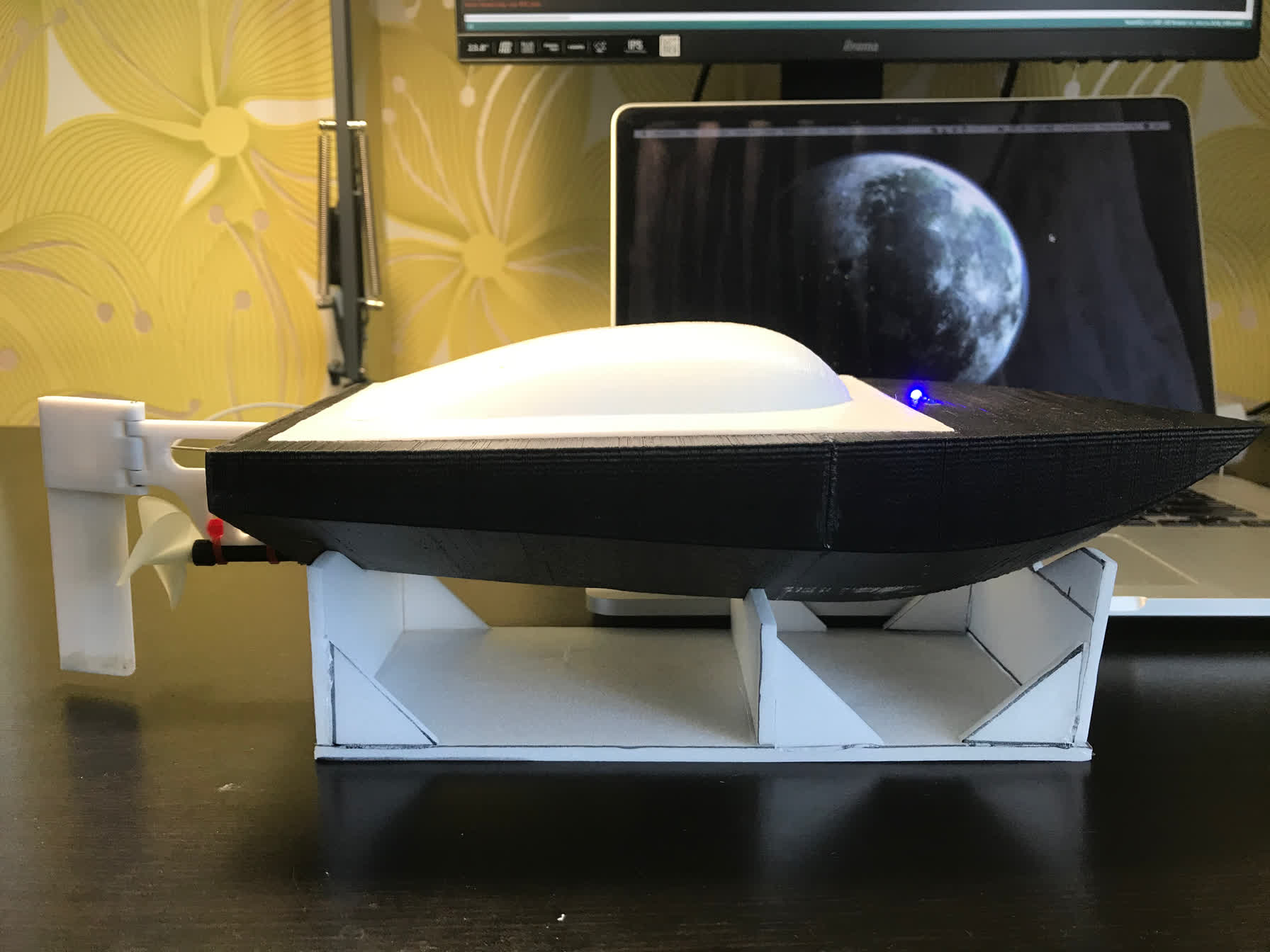
Весь корпус и основные детали из пластика!
Первый спуск на воду версии 3.x
При реальных испытаниях стало понятно, что дистанция, на которой держится хорошая связь между смартфоном и лодкой, примерно в три раза меньше, чем при тестах (27 метров против ~10 метров).Несколько раз соединение с лодкой терялось на середине пруда, и нам приходилось ждать, пока ветерок подтолкнёт её к одному из берегов, где к ней снова можно было подключиться и начать управлять.
После таких казусов был введён параметр Emergency timeout, который можно настроить на клиенте (по умолчанию — 4 минуты). Он передаётся серверу с каждой командой. Если за этот таймаут лодке не приходили команды, то она начинала неспешно двигаться вперёд, в закат. На небольшом пруду это была отличная стратегия. В море такой таймаут лучше убрать)
Вспомнил, что отказался от бесщёточного двигателя как раз из-за слабых питательных элементов.Попробовал подключить их к аккумуляторам 18650, и всё заработало как надо!Из-за того, что бесщёточный двигатель предназначен для коптера, то просто так горизонтально установить его не получится (крутится весь двигатель, кроме основания).Поэтому смоделировал и напечатал подложку для него.

Первая версия подложки
Подложка подошла идеально
Первая версия подложки для двигателя отлично подходила к нему, но плохо вписывалась в корпус лодки, так что пришлось ещё немного поэкспериментировать с её формой.
Спустя 2-3 распечатанных модели наконец-то получилось сделать подложку, которая хорошо помещалась внутри лодки и не мешала работе двигателя.
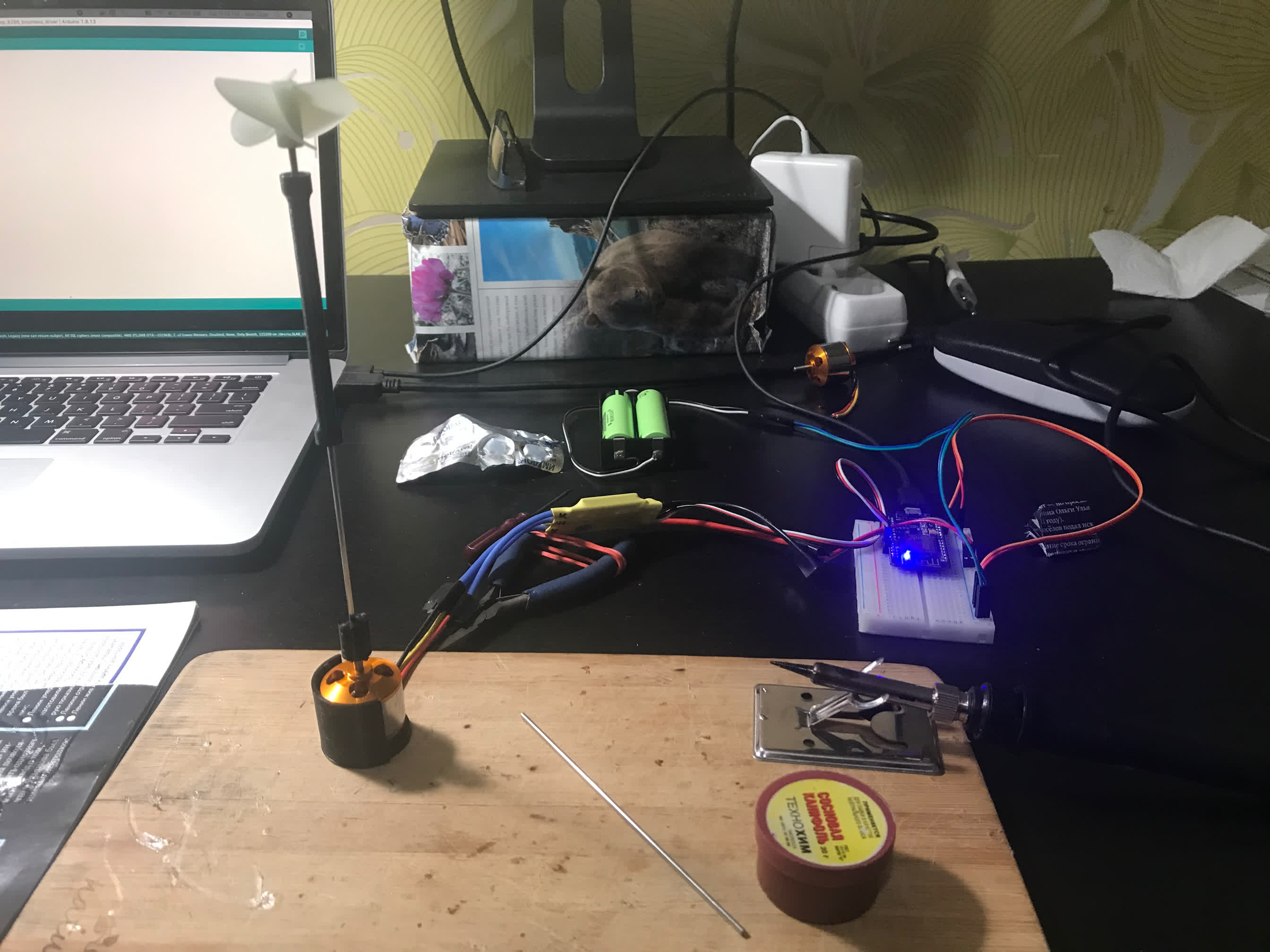
Весь вал в сборке от мотора до винта
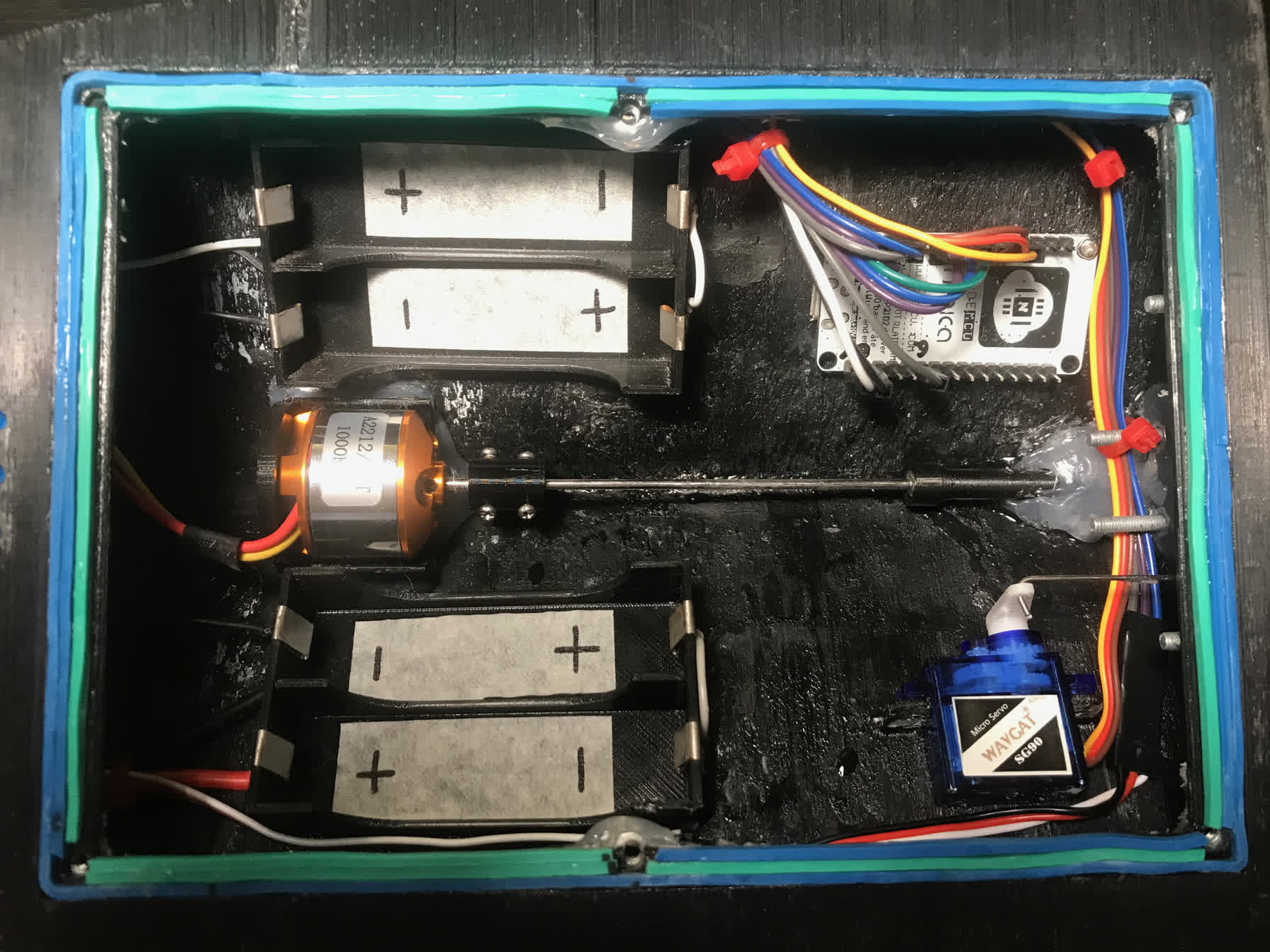
Версия 3.4Особенности версии:
Вклеил двигатель и тестировал его отдельно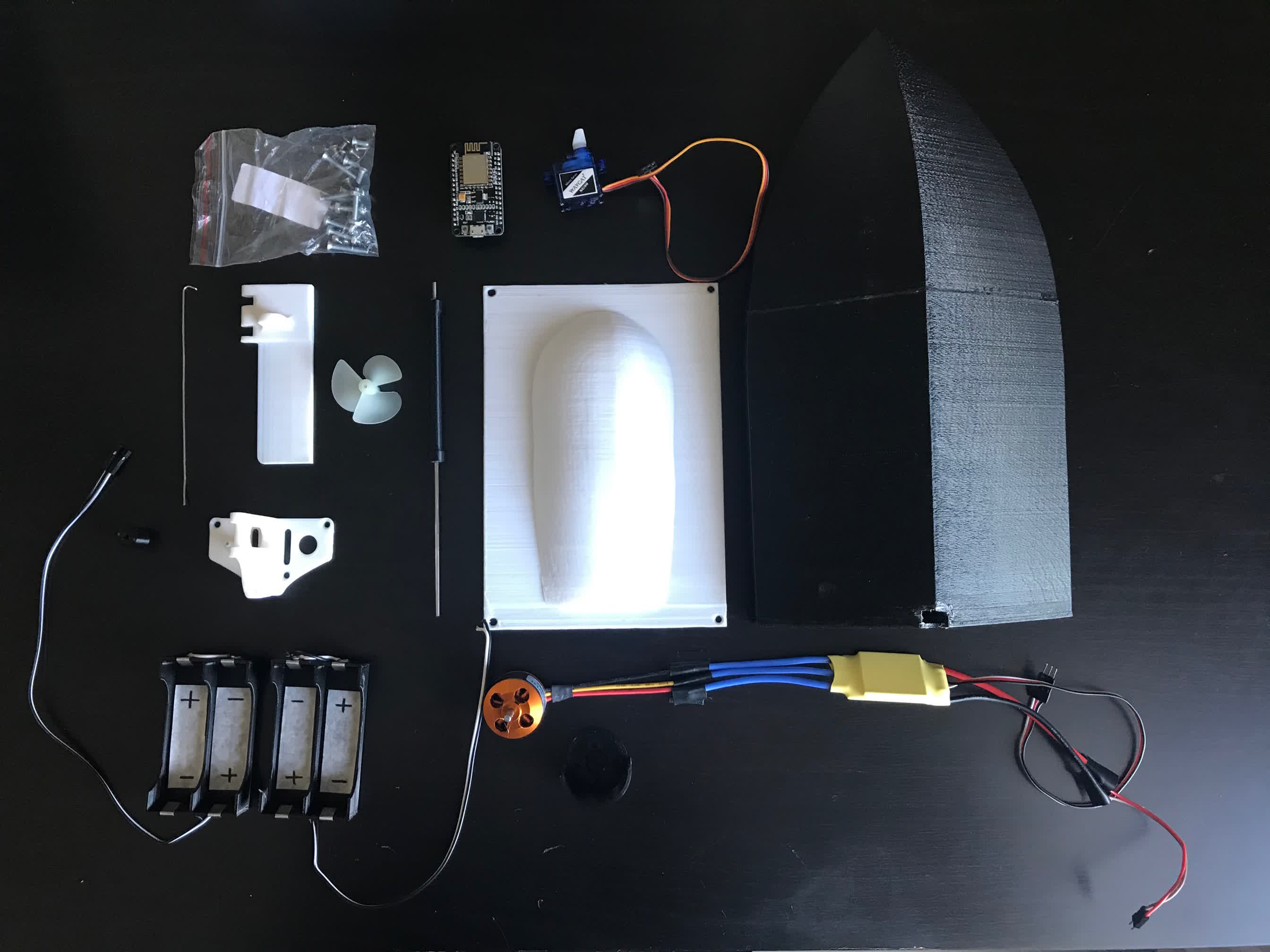
Полный комплект новой версии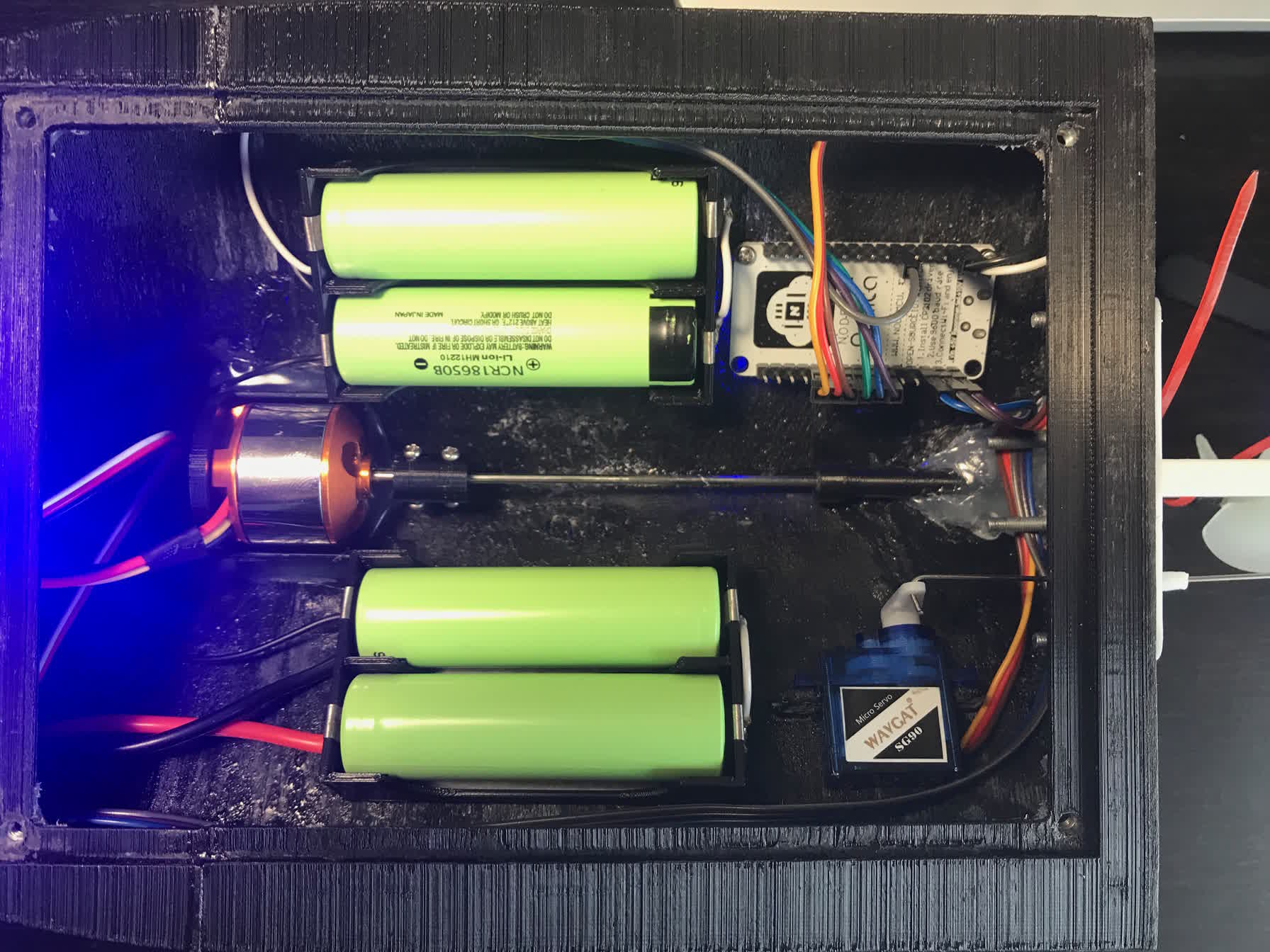
Собранная версияВзвесил лодку в полной комплектации:
В полной комплектации лодка весит 626 грамм
Версия 3.5Особенности версии:
Проклеил верх резинками
Финальный вариант:
Финальное видео версии 3.5
Примеры декларирования по данному коду
8517 62 000 9
УСТРОЙСТВА ДЛЯ ПРИЕМА, ПРЕОБРАЗОВАНИЯ И ПЕРЕДАЧИ ИЛИ ВОССТАНОВЛЕНИЯ ГОЛОСА, ИЗОБРАЖЕНИЙ ИЛИ ДРУГИХ ДАННЫХ, НЕ ВОЕННОГО НАЗНАЧЕНИЯ, : ; АДАПТЕР USB BURO BU-BT21A BLUETOOTH, РАДИОКАНАЛ 2400 МГЦ, 2. 1 EDR CLASS 2, РАДИУС ДЕЙСТВИЯ 10М, СКОРОСТЬ ПЕРЕДАЧИ ДАННЫХ 3 МБ/С, ЧЕРНЫЙ BURO BU-BT21A; № 341941; (ФИРМА) NINGBO DAHAN IMPORT & EXPORT CO. , LTD; (TM) BURO
8517 62 000 9
МАШИНЫ ДЛЯ ПРИЕМА, ПРЕОБРАЗ. И ПЕРЕДАЧИ ДАННЫХ. /НЕ ИМЕЮТ ФУНКЦИЙ ШИФРОВАНИЯ, КРИПТОГРАФИИ, НЕ ИМЕЕЮТ ФУНКЦ. ЗАПИСИ, НЕ СПЕЦ. ТЕХ. СРЕДСТВА, НЕ ПРЕДН. ДЛЯ НЕГЛАСН. ПОЛУЧ. ИНФОРМ. ,НЕ РЭС, НЕ ВЧ УСТР-ВА, НЕ АППАРАТНО- ПРОГРАММНЫЕ КОМПЛЕКСЫ, НЕ ЛОМ ЭЛ. ОБОРУД. ,НЕ ДЛЯ ПРОИЗВОДСТВА, НЕ ДЛЯ РЕМОНТА ВОЕН. ТЕХНИКИ/; X20 МОДУЛЬ-КОНЦЕНТРАТОР, МОДЕЛИ X20HB – ЭЛЕКТРОННЫЙ БАЗОВЫЙ ВСТАВНОЙ МОДУЛЬ, ОБОРУДОВАН КОНТАКТАМИ, В ПЛАСТИКОВОМ КОРПУСЕ. ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ: ВСТРОЕННЫЙ КОНЦЕНТРАТОР, 1 РАЗЪЕМ, НАПРЯЖЕНИЕ ПИТАНИЯ 24 В. В СОСТАВЕ ИМЕЕТ ВСТРОЕННУЮ; (ФИРМА) B& R INDUSTRIAL AUTOMATION GMBH; (TM) B& R
8517 62 000 9
ОБОРУДОВАНИЕ ПРОВОДНОЙ СВЯЗИ ДЛЯ ПРИЕМА, ПРЕОБРАЗОВАНИЯ И ПЕРЕДАЧИ АКУСТИЧЕСКИХ СИГНАЛОВ, ГРАЖДАНСКОГО НАЗНАЧЕНИЯ, В ЧАСТИЧНО РАЗОБРАННОМ ВИДЕ С КОМПЛЕКТУЮЩИМИ НЕОБХОДИМЫМИ ДЛЯ УСТАНОВКИ И РАБОТЫ УСТРОЙСТВА : ; ЦИФРОВОЙ АУДИОПРОЦЕССОР, 32X32 ЦИФРОВЫХ КАНАЛОВ ЗВУКА DANTE, 12 МИК/ЛИН ВХОДОВ, 8 ВЫХОДОВ, ЭХОПОДАВЛЕНИЕ (AEC) НА 12 ВХОДАХ, 8 КАНАЛОВ ЗВУКА ПО USB, OLED-ДИСПЛЕЙ, НАСТРОЙКА И УПРАВЛЕНИЕ ПО ETHERNET, RS-232, ВЫСОТА 1U. ОСНОВНЫЕ ФУНКЦИИ: -32X32 ЦИФРОВЫХ; (ФИРМА) BIAMP SYSTEMS CORP; (TM) BIAMP
8517 62 000 9
УСТРОЙСТВА ДЛЯ ПРИЕМА, ПРЕОБРАЗОВАНИЯ И ПЕРЕДАЧИ ИЛИ ВОССТАНОВЛЕНИЯ ГОЛОСА, ИЗОБРАЖЕНИЙ ИЛИ ДРУГИХ ДАННЫХ. НЕ ЛОМ ЭЛЕКТРООБОРУДОВАНИЯ, НЕ ВОЕННОГО НАЗНАЧЕНИЯ, БЕЗ СОД. РАДИОАКТИВНЫХ И ВЫСОКОЧАСТОТ. УСТРОЙСТВ, ДЛЯ КОНТРОЛЬНО-КАССОВОГО ОБОРУДОВАНИЯ: ; БЛОК УПРАВЛЕНИЯ РЕГИСТРАТОРА ВЫБЫТИЯ, ПРЕДСТАВЛЯЕТ СОБОЙ ЭЛЕКТРОННЫЙ МОДУЛЬ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ УПРАВЛЕНИЯ РЕГИСТРАТОРОМ ВЫБЫТИЯ, ОСУЩЕСТВЛЯЮЩИМ МОНИТОРИНГ ДВИЖЕНИЯ ТОВАРОВ, КРИПТОГРАФИЧЕСКИЕ ФУНКЦИИ ИСПОЛЬЗУЮТСЯ ДЛЯ АУТЕНТИФИКАЦИИ. ДАННЫЙ БЛОК; (ФИРМА) GKK LIMITED; (TM) GKK
8517 62 000 9
АППАРАТЫ ДЛЯ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ДАННЫХ, НЕ ЯВЛЯЮТСЯ ШИФРОВАЛЬНОЙ ТЕХНИКОЙ, НЕ ПРЕДНАЗНАЧЕНО ДЛЯ НЕГЛАСНОГО ПОЛУЧЕНИЯ ИНФОРМАЦИИ НЕ СОДЕРЖИТ ВСТРОЕННЫХ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ И ВЫСОКОЧАСТОТНЫХ УСТРОЙСТВ, ОГРАНИЧЕНЫХ К ВВОЗУ НА ТЕРРИТОРИЮ ТАМОЖЕННОГО СОЮЗА, НЕ СОДЕРЖИТ ФУНКЦИЙ ШИФРОВАНИЯ (КРИПТОГРАФИИ) , НЕ ОТНОСИТСЯ К ОПАСНЫМ ОТХОДАМ И НЕ ЯВЛЯЕТСЯ ПРОДУКЦИЕЙ ВОЕНОГО НАЗНАЧЕНИЯ; CB RADIO (27MHZ) / СИ-БИ РАДИОСТАНЦИЯ OPTIM-APOLLO, ПРЕДНАЗНАЧЕНА ДЛЯ ОСУЩЕСТВЛЕНИЯ ДВУСТОРОННЕГО РАДИООБМЕНА В ДИАПАЗОНЕ ЧАСТОТ 26965-27410 КГЦ (ГРАЖДАНСКИЙ ДИАПАЗОН, СИ-БИ, CB) С ЧАСТОТНОЙ ИЛИ АМПЛИТУДНОЙ МОДУЛЯЦИЕЙ. РАДИОСТАНЦИЯ ПРЕДНАЗНАЧЕНА ДЛЯ; (ФИРМА) QIXIANG ELECTRON SCIENCE & TECHNOLOGY CO. , LTD; (TM) OPTIMCOM TECHNICAL GROUP
8517 62 000 9
МАШИНЫ ДЛЯ ПРИЕМА, ПРЕОБРАЗОВАНИЯ И ПЕРЕДАЧИ ИЛИ ВОССТАНОВЛЕНИЯ ГОЛОСА, ИЗОБРАЖЕНИЙ ИЛИ ДРУГИХ ДАННЫХ (НЕ ВОЕННОГО НАЗНАЧЕНИЯ) , РАБОТАЕТ ТОЛЬКО С ОТКРЫТЫМИ КОММЕРЧЕСКИМИ КОДЕКАМИ, БЕЗ ФУНКЦИИ ШИФРОВАНИЯ (КРИПТОГРАФИИ) ,: ; ПОРТАТИВНОЕ УСТРОЙСТВО ДЛЯ ЗАХВАТА И ВЫВОДА SD/HD/3G-ВИДЕО НА КОМПЬЮТЕР ЧЕРЕЗ ИНТЕРФЕЙС THUNDERBOLT, СКОРОСТЬ 270 МБ, 1, 5 ГБ, 3 ГБ, 1 ВИДЕОВЫХОД, HDMI ВЫХОД, ПИТАНИЕ ЧЕРЕЗ USB, ВЕС 0, 6 КГ; (ФИРМА) BLACKMAGIC DESIGN LTD. ; (TM) BLACKMAGIC DESIGN
Проверка водонепроницаемости и тесты
Заклейте все отверстия и потенциальные места утечки термоклеем. Заизолируйте все провода (например от кнопок) во избежание кроткого замыкания.
И приступайте к испытанием в воде!
Оригинал статьи
Провода к двигателям
Если на двигатели нет проводов, то припаяйте длинные (около 30см) провода к двигателям, прикреплённым к пробкам.
Сделайте небольшую щель для вывода проводов от двигателей в каждой бутылке.
Закрутите крышки на бутылки и проденьте провода через щели. Если крышка плохо закручивается, то приклейте её термоклеем.
Прототип дистанционного управления 1.0
Для начала собрал простой прототип машинки из LEGO, деталей от других поделок с Arduino и powerbank’а.
На ESP8266 NodeMCU я поднял:

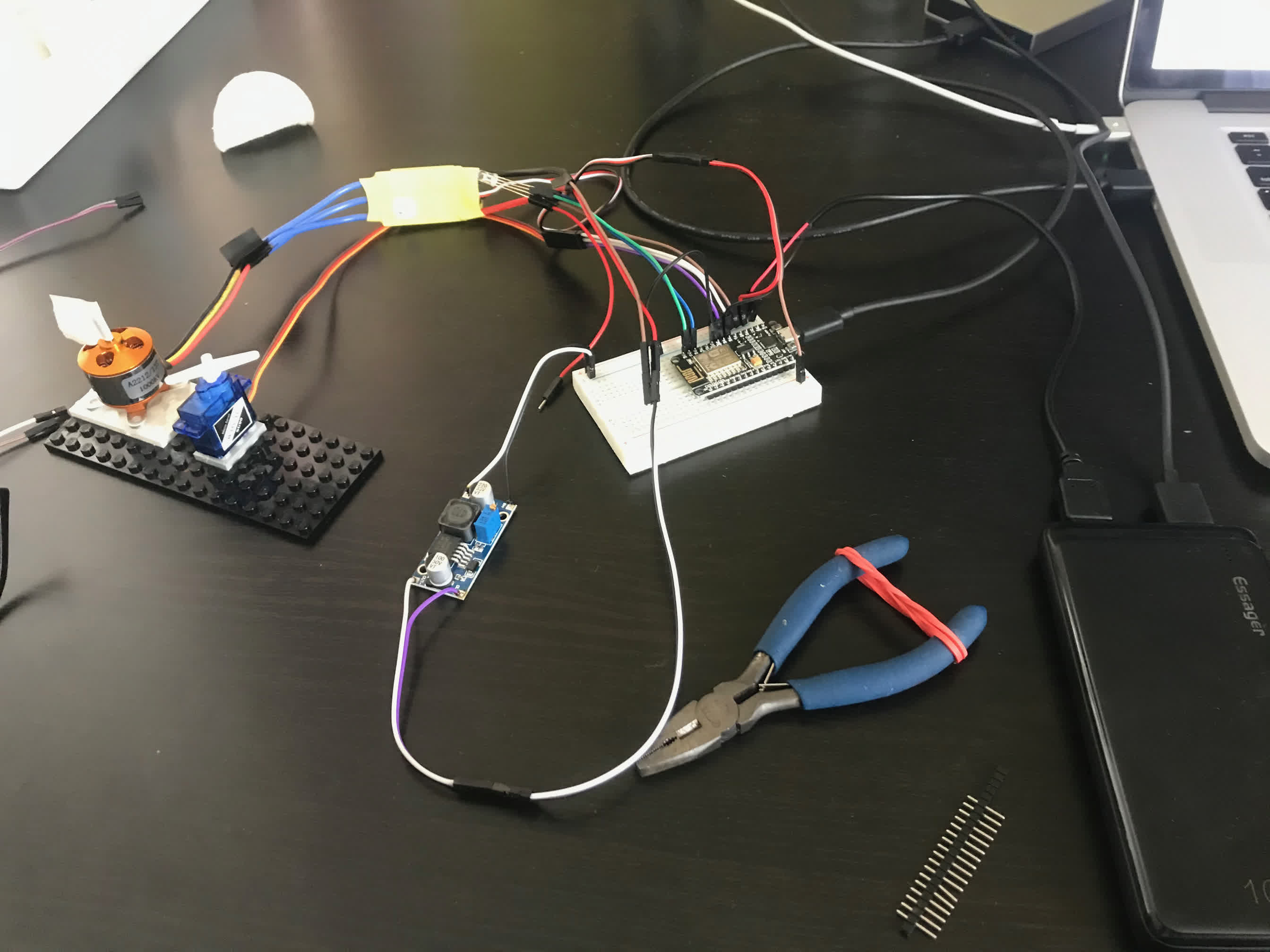
Схема подключения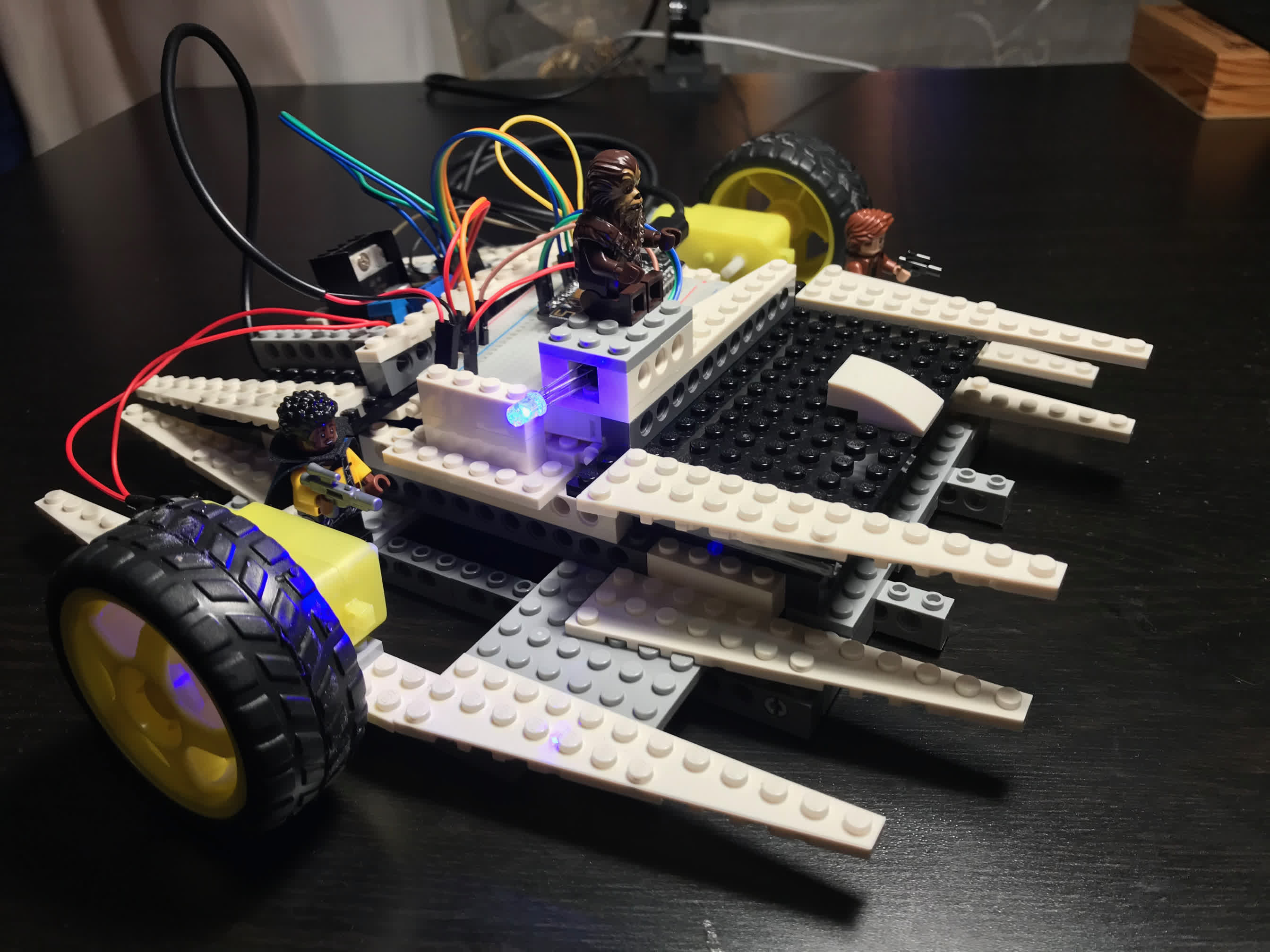
Первый прототип
Отлично, оно работает!
Прототип дистанционного управления 2.0
Управлять кнопками не очень-то удобно, поэтому я переделал интерфейс и стал управлять прикосновениями к определёнными частям экрана.
При таком интерфейсе приходилось часто слать запросы серверу, поэтому я добавил WebSocket сервер на ESP8266 NodeMCU и передавал команды уже по установленному с сервером соединению.
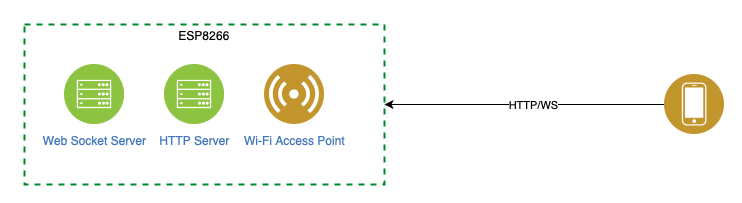
Схема подключения
Второй прототип
Пример управления
Подробно про то, как собрать такую машинку, я писал тут.
Решения по классификации товаров по данному коду
8517 62 000 9
Контроллер . .. представляет собой электронное устройство, предназначенное для приема сигналов проводной связи, преобразования их в радиосигналы и передачи для управления контроллерами (приемниками) , которые отвечают за включение/выключение освещения и управление электроприводом в мягкой/корпусной мебели. Контроллер состоит из следующих основных компонентов: корпус, внутри которого расположены высокочастотный передатчик, микропроцессор, телекоммуникационный трансформатор, контроллер локальной сети, антенна, литиевый элемент питания, линейный регулятор напряжения, слот карты памяти, розетка подключения wi-fi роутера, разъем питания microUSB, кнопка сброса настроек. Принцип работы: контроллер . .. подключается к wi-fi роутеру посредством сетевого кабеля, через который на телекоммуникационный трансформатор и контроллер локальной сети поступает низкочастотный сигнал. Далее сигнал поступает на микропроцессор, на котором обрабатывается и передается на высокочастотный передатчик. Передатчик преобразует сигнал в высокочастотный и через антенну передает его на контроллеры (приемники) отвечающие за включение/выключение освещения и управлением электроприводом в механизме трансформации мягкой мебели (настройка и управление контроллера . .. осуществляется посредством мобильного приложения) . Технические характеристики контроллера: рабочая частота 868 МГц; расход мощности 1, 6 Вт; дальность действия до 250 м; размеры 160х100х32 мм.
8517 62 000 9
Модуль расширения входов/выходов ЕСА 32 представляет собой устройство, предназначенное для приема, обработки преобразования и передачи сигналов между регулятором температуры типа . .. 310/310В (в комплект поставки не входит) и внешними устройствами, такими как аналоговые электроприводы клапанов систем теплоснабжения и ГВС, счетчики импульсов, катушки контакторов горелок, датчики температуры, давления (в комплект поставки не входят) , подключенными к модулю. Устройство является внутренним, устанавливается в клеммную панель регулятора температуры типа . .. Связь между устройством и регулятором температуры осуществляется при помощи 10-контактного разъема. Конструктивно представляет печатную плату с установленными компонентами: микросхемами, транзисторами, реле, варисторами, сопротивлениями, конденсаторами, клеммами, которые обеспечивают прием входных сигналов, их сравнение, обработку, преобразование, передачу выходных сигналов. Принцип действия устройства: цифровой сигнал управления с регулятора температуры поступают на клеммы 10-контактного разъема устройства и далее на мультиплексор/демультиплексор (микросхема . .. ), который осуществляет сравнение входных сигналов и выделение сигнала с требуемыми параметрами, обеспечивает его передачу на микропроцессор (микросхема . .. ). Микропроцессор осуществляет обработку входного сигнала и его дальнейшую передачу на цифро-аналоговый преобразователь (микросхема . .. ). Цифро-аналоговый преобразователь осуществляет процесс преобразования сигнала из цифрового в аналоговый, обеспечивает его передачу на усилители (выполнены на базе микросхемы . .. ), проходя через которые величина аналогового сигнала преобразуется до значения, необходимого для работы внешнего устройства. Далее выходной аналоговый сигнал поступает на клеммы модуля, с которых он передается на внешнее устройство, например, аналоговые электроприводы клапанов систем теплоснабжения и ГВС. Технические характеристики: количество аналоговых входов – 3; максимальная нагрузка на аналоговыый выход – 2 мА; максимальная нагрузка на выходные реле – 4 (2) А; количество импульсных входов – 2; максимальная частота импульсного входа – 200 Гц. Габаритные размеры: 71 мм х 76, 5 мм х 33, 3 мм. Товар поставляется упакованным в картонную коробку совместно с Инструкцией (вкладышем) .
8517 62 000 9
Электронное устройство в форме наручных часов, носимое на запястье, синхронизирующееся со смартфонами на базе операционных систем Android (версии 4. 4. или более поздних версий) и Apple iOS (версии 8. 0 или более поздних версий) при помощи технологии Bluetooth для отображения информации о входящих звонках и сообщениях, поступающих на подключенный смартфон, о текущем времени, выборе циферблата, пройденных шагах, показателях физической активности (ходьба, езда на велосипеде, бег, пешая прогулка с отслеживанием показателей физической активности) , о сердечном ритме, качестве сна, погоде, удаленное управление фотокамерой смартфона, сигналы (о приеме воды) , напоминания, смарт-пробуждение. Устройство имеет корпус прямоугольной формы и ремешок черного цвета, оснащено цветным LCD TFT дисплеем 0. 96″ с сенсорной кнопкой для выбора функций, Bluetooth модулем, датчиком оптического пульсометра, акселерометром, кварцевым генератором, встроенным USB коннектором. Товар не содержит встроенного приемника GPS-сигнала. С помощью встроенных датчиков (акселерометра, датчика пульсометра) устройство подсчитывает количество пройденных шагов, измеряет количество израсходованных калорий, продолжительность сна, частоту сердечного ритма. После синхронизации устройства со смартфоном с отключенной функцией передачи данных оно способно отображать время, количество пройденных шагов, показатели сердечного ритма, уровень физической активности пользователя (ходьба, езда на велосипеде, бег, пешая прогулка) , данные о сне. Питание устройства осуществляется от несъемной литий-полимерной аккумуляторной батареи емкостью 90 мАч. Габаритные размеры устройства (без ремешка) : 4, 1 х 1, 9 х 1, 2 см; длина в разложенном виде (приблизительно) 25 см; ширина ремешка: 1, 5 см. Вес устройства: 20 гр. Товар упакован в картонную коробку совместно с руководством по эксплуатации.
Скрепление бутылок
Скрепите бутылки вместе по принципу плота при помощи двух или трех полос клейкой ленты.
Суда и лодки массой от 100 кг и длинной 6 метров
Суда и лодки массой от 100 кг и длиной до 6 метров (включительно 5,99) подлежат обязательной сертификации соответствия требованиям Технического Регламента Таможенного Союза 026/2023, который был назван «О безопасности маломерных судов».
Стоимость такой сертификации стоит от 300 тыс. руб., сертификат выдается на 5 лет.Выезд эксперта на производство и предоставление образца(цов) обязательны. Также предусмотрен ежегодный инспекционный контроль.
Получить бесплатную консультацию
Схемы для различных датчиков
На рисунке изображена схема с простой кнопкой и 1K резистором. Повторите её для двух кнопок и установите их по обеим сторонам лодки. Это позволяет изменять направление движения в случае столкновения. Больше информации об этой схеме и образцы кода можно найти по ссылке
На втором рисунке изображена схема с фотоэлементом и 1K резистором. Повторите её два раза и разместите фотоэлементы по разным сторонам лодки. Больше информации и образцы кода можно найти по ссылке.
Также могут потребоваться следующие документы
Документы на ввоз (вывоз) СТС НПИ
Виды документов: Лицензия или Разрешение ФСБ.
Документы требуются при ввозе и вывозе, только если товар можно отнести к Специальным техническим средствам, предназначенные для негласного получения информации (СТС НПИ), включенным в раздел 2.17 приложения 2 к решению ЕЭК № 30 от 21 апреля 2023 года.
Подробная информация
Основным критерием в данном случае является не код ТН ВЭД, а специальное назначение, особенности конструкции устройства, позволяющие вести скрытное (негласное) наблюдение, прослушку, перехват информации, идентификацию личности и пр. Бытовые товары, как правило, не могут быть отнесены к СТС НПИ.
При возникновении сомнений у импортера или таможенных органов следует провести экспертизу товара в компетентной организации.
Тестирование дальности приёма
Чтобы проверить, на какую дальность можно рассчитывать в управлении, собрал вот такую штуку:
На клиенте можно запустить ping/pong тест к WebSocket серверу с замером времени ответа.В таблицу выводится количество запросов/ответов и перцентиль времени ответа.
Походив по парку при прямой видимости, понял, что приемлемая для меня связь между такой поделкой и моим смартфоном держится на расстоянии не более 27 метров (расстояние потом проверял по картам).
27 метров: 95 перцентиль ~ 48 миллисекунд, 99 перцентиль ~ 283 миллисекунды.

Интерфейс клиента для тестирования дальности приёма
Вот тут можно взять код и провести эксперимент самому.
Версия 1.0Электронные компоненты:
Материалы:
Особенности версии:
У меня была рабочая схема дистанционного управления, так что можно было заняться корпусом.
Чтобы собрать корпус лодки, я использовал чертежи из статьи Francisco MolinerРаспечатал их, склеил и вырезал из потолочной плитки.
Пока я собирал корпус и думал о том, из чего же делать дейдвуд, ко мне приехал бесщёточный двигатель A2212 1000KV.По неопытности я заказал двигатель для коптеров:
Я неделю промучился с этим двигателем.У меня получилось запустить мотор, но при резком изменении напряжения (быстро повысил или понизил скорость) двигатель отключался и контроллер перезагружался.Думаю, что это из-за небольшой мощности питательного элемента (powerbank).В конце концов я решил отказаться от него в пользу более мощного щёточного двигателя.
Тщетно пытаюсь настроить стабильную работу мотора
Сборка идёт полным ходом
Первый тестовый спуск на воду
Я понял, что у меня получится сделать хороший прототип, но он будет непрезентабельный.Решил, что настала пора заказать 3D-принтер, который уже давно хотелось опробовать.
Версия 1.1Особенности версии:
Для управления скоростью мотора я использовал L298N, но при этом терял почти половину мощности.Это особенность использования ШИМ или сама схема так сделана — точно не знаю.Я решил отказаться от управления скоростью. В итоге использовал L298N, но без управления ШИМ, что дало большой прирост мощности мотора.
Установка двигателей в крышки от бутылок
1. Снимите крышки с бутылок.2. Сделайте отверстия в каждой крышке.3. Выдавите термоклей внутри крышки, но не закрывайте отверстия. Поместите вал двигателя в отверстие и посадите его на клей. После того как клей засохнет, вал должен свободно вращаться.Сделайте это с каждой крышкой.
Электронная часть
В схеме в качестве электронного ключа используется TIP 120 (или аналогичный транзистор Дарлингтона или MOSFET).Он используется для коммутации нагрузки потребляющей большой ток, потому что Arduino не может дать достаточно тока для двигателей. Соберите эту схему для первого двигателя и потом повторите для второго (вторая батарея не нужна).
Итоги
Весь процесс растянулся примерно на полгода. Дорабатывать и улучшать модель можно было бы ещё очень долго. Я решил остановиться на достигнутом результате.
Другу подарок понравился, так что я доволен вдвойне)
Исходники 3D-моделей и кода лодки тут.Исходники кода тестов дальности тут.
Спасибо за внимание!
P.S. Большое спасибо моей девушке за поддержку и ведение фото- и видеоотчетов.

 (LiPo) - 94182PRO")





