

- 2 варианта настройки датчика тока на квадрокоптере.
- Betaflight configurator, настройка на русском
- How to fix wrong voltage in betaflight osd
- Pid-настройки
- Step 1 – measuring battery voltage
- Step 2 – checking voltage reading in betaflight
- Step 3 – voltage sensing calibration
- Больше нет sd-карты памяти
- Вкладка blackbox
- Вкладка modes
- Вкладка motors
- Вкладка osd
- Вкладка pid tuning
- Вкладка ports
- Вкладка receiver
- Во-первых, настройка датчика тока с помощью обычного мультиметра.
- Второй способ настройки датчика тока полетного контроллера квадрокоптера. экспериментальный.
- Другие незначительные изменения
- Как настроить телеметрию регуляторов оборотов в betaflight osd
- Как откалибровать датчик тока и датчик напряжения в betaflight
- Как сохранить настройки betaflight
- Какие бывают датчики тока в квадрокоптере?
- Калибровка датчика напряжения betaflight
- Калибровка датчика тока betaflight
- Командная строка (cli)
- Конфигурация
- Моторы
- Настраиваем betaflight : 4 комментария
- Настраиваем телеметрию регуляторов скорости в betaflight
- Настройка betaflight для первого полета
- Обзор betaflight f4
- Обзор btaflight, полетные режимы и настройки
- Ограничения связанные с использование телеметрии регуляторов
- Питание и батарея
- Подключаем micro usb кабель
- Порты
- Прежде чем начать
- Процессор
- Рекомендации: проверка безопасности
- Требования к оборудованию
- Заключение
- Выводы
2 варианта настройки датчика тока на квадрокоптере.
Хочу рассказать вам о паре способов, как можно настроить датчик тока на полетном контроллере.
Betaflight configurator, настройка на русском
Betaflight configurator, настройка на русском. После сборки всех компонентов квадрокоптера, нужно прошить мозг (полетный контроллер) и регуляторы оборотов специальной программой — это Betaflight и BLHeli.
В этой же статье, мы будем рассматривать структуру конфигуратора Betaflight и то, что в нем можно настроить.
Прошить — это загрузить программное обеспечение в устройство. Без прошивки ваш дрон никуда не полетит. Трудность настройки в том, что у прошивки сотни различных настроек для всех типов полетов и под конкретные нужды.
Цель этой статьи — помочь начать с минимального набора функций, необходимых для начала полета. Если вы впервые сталкиваетесь с прошивкой квадрокоптера, то эта инструкция для вас. Для начала, сделайте базовые настройки, чтобы просто начать летать, и уже потом, в процессе, начинайте делать остальные настройки.
В этой статье мы будем рассказывать о Betaflight Configurator версии 10.7 и на основе прошивки Betaflight 4.1.6, хотя есть уже и 4.2. Если у вас другая прошивка, например, CleanFlight, то не все тут будет совпадать с вашей прошивкой, так что, рекомендую все же прошить свой квадрокоптер в Betaflight, так как это самое популярное ПО для дронов, к тому же, часто обновляется.
Резервное копирование
Перед любыми настройками в конфигураторе, делайте полный бекап (резервную копию) кнопкой «Сохранить» на главной странице Betaflight. В случае проблем, вы сможете загрузить ее и все вернуть «как было». С помощью этой кнопки, делается полный бекап. Другие виды бекапов можно делать через командную строку (CLI), об этом читайте здесь: CLI: командная строка Betaflight — как сделать бекап и посмотреть настройки, а также команды
Включите режим экспертаФлажок «Включить режим эксперта» был сделан для того, чтобы не показывать функции, которые многие пилоты никогда не будут использовать, хотя, скорее всего это сделано для новичков, чтобы они не терялись, им будет доступен минимальный набор важных функций для настройки. Но вы явно уже не совсем новичок, раз читаете эту статью. Поэтому, рекомендуем вам включить режим эксперта:
How to fix wrong voltage in betaflight osd
One of the most heavily used features in the Betaflight is probably battery voltage monitoring. While most of the times it is more or less correct out of the box, there are times you have to calibrate it. If it’s displaying the wrong voltage in Betaflight OSD, here is how to fix it.
We rely on voltage sensing to decide when we should land. If the warning happens too late, you can risk over-discharging your battery, or too early, you could have shortened flight time by “leaving too much fuel in the tank”. Calibrate voltage ensure this won’t happen.
Pid-настройки
Сложный раздел, в котором настройки производят далеко не все пилоты, за исключением очень увлеченных и профессионалов.
Углубляться в этой статье нет смысла, так как у нас есть несколько отдельных статей по этому разделу:
Step 1 – measuring battery voltage
Take a LiPo battery that you normally use on the quad, doesn’t matter if it’s charged or not. Use a multimeter to measure voltage of the battery. Do this while the battery is connected to the quad, because when it’s powering the quad, there will be a small voltage drop.
A common mistake people tend to make is measuring the battery voltage before connecting it to the quad. And when they read it from Betaflight, it would of course be a bit lower and they assume Betaflight is reading it too low, which is incorrect.
You can test the voltage by either touching the battery lead solder pads with the probes as shown below, or touch the balance lead terminals at each end. It doesn’t matter if you are testing it backward, your multimeter will just report a negative voltage which is fine.
This will be our reference voltage.
If you’ve never used a multimeter before, or not sure which multimeter to buy, see my tutorial.
Step 2 – checking voltage reading in betaflight
Leave the LiPo plugged in to the quad, and connect flight controller to computer.
Do this as soon as you can because your quad is draining the battery. If this is going to take you a while to do, unplug battery first, and only plug it in when you are ready.
Open Betaflight Configurator, go to the “Power and Battery” tab, under “Power State” section (on the right), you should see “Voltage” displayed there. This same value is what get displayed in Betaflight OSD as well.
If this value is roughly the same as what you got from the multimeter, then you are good, no adjustment is needed and you can close this page now.
But if this is different, it probably means voltage sensing needs to be calibrated, and here is how.
Step 3 – voltage sensing calibration
If Betaflight is reporting voltage too high, reduce the number “scale” under “Voltage Meter”.
Больше нет sd-карты памяти
В F3 версии память была внешней посредством подключения SD-флешки к слоту, но в F4 решили убрать слот и интегрировать флеш память в саму плату, теперь у четверки встроенная память. С картами памяти в F3 были проблемы, часто происходили ошибки распознавания и записи данных, поэтому чтобы избавиться от этой проблемы, память просто интегрировали в плату. SD-карта у полетников нужна в качестве черного ящика (BlackBox).
Вкладка blackbox
Черный ящик нужно для того, чтобы записывать все данные полета — телеметрию. По мере того, как вы будете набираться опыта, журнал черного ящика будет вашим лучшим другом по настройке своего дрона. Blackbox по умолчанию включен. Данные будут писаться либо во встроенную флеш-память, либо на внешнюю SD-карту.
У всех современных полетных контроллеров есть своя память и это как минимум 16 мегабайт. Этого вполне хватит, чтобы записывать логи полета.
Вкладка modes
Тут мы настраиваем полетные режимы и их активацию при помощи дополнительных (AUX) каналов управления (тумблеры на аппаратуре управления):
- Arming (арминг, включение коптера/моторов)
- Airmode (управляемость коптера при 0 значении газа)
- Angle mode (режим полета без автовыравнивания)
- Beeper (пищалка)
Я предпочитаю активировать Airmode тем же тумблером что и арминг коптера, а не отдельным, но это дело вкуса.
Вкладка motors
Проверим порядок моторов:
- мотор 1 — сзади справа
- мотор 2 — спереди справа
- мотор 3 — сзади слева
- мотор 4 — спереди слева
Если у вас другой порядок моторов, тогда его нужно поменять при помощи переназначения ресурсов (Resource Remapping).
Подробная инструкция по переназначению ресурсов
Теперь проверьте направление вращения моторов, его можно поменять в BLHeliSuite.
Инструкция: подключаем BLHeliSuite (конфигуратор для регуляторов скорости) через полетный контроллер
Вкладка osd
Вот подробная инструкция по настройке Betaflight OSD
Вкладка pid tuning
Для первого полета здесь ничего менять не нужно. Но настройка ПИД коэффициентов и рейтов может помочь летать лучше.
ПИД — это по сути 3 коэффициента для каждой оси: крен (roll), тангаж (pitch) и рысканье (yaw). Настройка этих коэффициентов подразумевает, что вы понимаете, как они влияют на летные характеристики.
Вот моё руководство по настройке ПИД (англ).
Rate, Super Rate и Expo — определяют то, как резко коптер будет реагировать на движение стиков.
Руководство по настройке Rate, Super Rate и Expo
Вкладка ports
- Если у вас приемник SBUS или IBUS, тогда включите «Serial RX» на том порту, к которому приемник подключен.
- Если вы используете SmartPort телеметрию, тогда в столбце Telemetry Output выберите «SmartPort«; если не используете, тогда ничего не меняйте.
Вкладка receiver
Тут мы проверяем, что приемник работает правильно.
Включаем аппаратуру управления и приемник, двигаем стики по одному и наблюдаем как меняются значения в соответствующих каналах. Если меняются не те каналы, тогда нужно поменять их порядок в параметре «Channel Map«.
Если ни один из каналов не работает, тогда начинаем искать проблему:
- приемник привязан к передатчику (забинден)? На приемнике должен гореть зеленый светодиод
- приемник правильно подключен/припаян к полетному контроллеру?
- уверены, что Serial RX включили на нужном порту?
- уверены, что правильно выбрали протокол?
После того как убедитесь, что все каналы работают правильно, проверьте значения в средних и крайних точках в первых четырех каналах (Pitch, Roll, Yaw, Throttle, т.е. тангаж, крен, рысканье и газ). В центральном положении эти каналы должны иметь значение 1500, а крайние значения 1000 и 2000.
Если у вас другие значения, тогда читайте вот это руководство по настройке центральных и конечных точек.
Во-первых, настройка датчика тока с помощью обычного мультиметра.
Для того, чтобы измерить потребляемый ток мультиметром, необходимо спаять вот такой переходник. 
Состоит он из двух разъемов XT-60, автомобильного предохранителя на 10 ампер и трех кусков провода сечением не меньше 1,5 мм 2 .
Одним куском провода мы напрямую соединяем разъемы для аккумуляторов. Другие 2 куска припаиваем к разъемам, но оставляем разрыв. В этот разрыв припаиваем предохранитель. Он нам нужен для того, чтобы предотвратить порчу мультиметра. Большинство измерительных приборов, которые есть в продаже, имеют ограничение по измеряемому току в 10 А.
Ну вот и все готово для настройки датчика тока квадрокоптера.
- Переводим измерительный прибор в режим измерения тока
- Подключаем его с помощью «крокодилов» в разрыв цепи

- Подключаем полетный контроллер к компьютеру и запускаем Betaflight configurator. Ну или INAV, в общем, зависит от прошивки контроллера.
- Подключаем аккумулятор к квадрокоптеру через собранный нами переходник.
- Переходим на вкладку управления моторами в конфигураторе (INAV или Betaflight). Даем немного оборотов без пропеллеров и сравниваем показания в конфигураторе и на мультиметре. Обязательно сравнивайте показания под нагрузкой (работающими моторами). Даже если вы выкрутите моторы на полную мощность (без пропеллеров), сила тока вряд ли превысит 10 ампер.
- Подбором множителя
 на вкладке Конфигурация добиваемся одинаковых значений силы тока.
на вкладке Конфигурация добиваемся одинаковых значений силы тока. 
 Значение множителя в 345, например, я подобрал для полетного контроллера-клона Omnibus F4 PRO на этом квадрокоптере. Скоро на сайте появится стать по сборке квадрокоптера на этом контроллере.
Значение множителя в 345, например, я подобрал для полетного контроллера-клона Omnibus F4 PRO на этом квадрокоптере. Скоро на сайте появится стать по сборке квадрокоптера на этом контроллере.
Второй способ настройки датчика тока полетного контроллера квадрокоптера. экспериментальный.
Этот способ более затратный в плане времени, но если у вас нет мультиметра и лишних разъемов XT60, то он вполне имеет право на существование.
Итак, как настроить датчик тока без приборов? Ставите на квадрокоптер полностью заряженный аккумулятор. Летаете некоторое время, записываете значения потраченной емкости аккумулятора с OSD (оно напрямую зависит от потребляемой силы тока). Далее снимаете аккумулятор, ставите на зарядку и смотрите какое количество mAh «зальется» до полной зарядки.
Если значение с OSD зафиксировано, например, 500 mAh при делителе в настройках 250, а при зарядке вошло 340 mAh, то: 500/340 = 1,47. Новый делитель 250*1,47 = 367.
Источник
Другие незначительные изменения
ESC Telemetry Pads (контакты для телеметрии с регуляторов оборотов) — если у вас регуляторы марок KISS и BLHeli_32, то вы можете напрямую подключать их телеметрию к контроллеру, не придумывая иные способы подключения.
RX Voltage — (напряжение бортовой сети) в F3 нужно было припаивать провода отдельно, а в F4 для этого сделаны специальные выходные контакты.
Наличие Voltage Regulator / BEC (Battery Elimination Circuit) который преобразовывает ток с аккумулятора в напряжение 1.5А для питания внешних устройств на квадрокоптере. Теперь видео передатчик рекомендуется подключать к этому регулятору, либо к VBAT.
Как настроить телеметрию регуляторов оборотов в betaflight osd
Нужно просто подсоединить все пины телеметрии на регуляторов оборотов к UART (свободному) порту полетного контроллера. Где именно на вашем полетнике UART 1 смотрите по схеме своего контроллера, подробнее на картинке ниже:
Прежде всего, откройте Betaflight Configurator и в вкладке «Порты» найдите UART, который будет использоваться для телеметрии регуляторов, в разделе «Sensor Input» выберите «ESC» в раскрывающемся списке. Нажмите кнопку «Сохранить»:
Далее перейдите во вкладку «Configuration» и включите «ESC_Sensor»:
А чтобы использовать отображение напряжения, включите мониторинг во вкладке “Power & Battery”, выбрав “ESC Sensor”:
ВАЖНО: вам также необходимо установить протокол связи с регуляторами под названием DShot (DShot150, DShot300, DShot600 или DShot1200), без этого телеметрия работать не будет.
Теперь можете настроить телеметрию в OSD Betaflight. Перейдите в «OSD» и включите “ESC Temperature” и “ESC RPM” (скорость вращения двигателей):
Вот и все. Чтобы убедиться, что все работает, включите квадрокоптер, наденьте очки и поддайте газа, чтобы узнать, меняется ли число оборотов в изменении положения стика газа (обязательно снимите пропеллеры, если пробуете это делать дома).
Как откалибровать датчик тока и датчик напряжения в betaflight
Почти все современные полетные контроллеры оснащены минимальным набором датчиков, в том числе у них есть датчик тока и датчик напряжения. Эти датчики обычно уже откалиброваны производителем, но далеко не точно и уж тем более не под вашу уникальную сборку квадрокоптера.
Как сохранить настройки betaflight
При использовании только одного профиля, достаточно в терминале ПО (вкладка CLI) выполнить команду:
dump
Полученные данные выделяем мышкой и копируем в текстовый файл, который сохраняем.
При использовании нескольких профилей – используется следующая последовательность команд.
profile 0dumpprofile 1dump profiledump ratesprofile 2dump profiledump ratesprofile 0
Для восстановления настроек – достаточно скопировать их из текстового файла и вставить в окно терминала.
Ну и напоследок, как установить Betaflight и какие пиды выставить для Eachine Racer 130.
Удачных полетов!
Константин, Обзор квадрокоптеров
Какие бывают датчики тока в квадрокоптере?
В квадрокоптере есть 2 датчика, измеряющих:
Есть физические датчики, установленные в полетном контроллере, а есть виртуальные, которые работают на основе прошивки.
Поэтому, в квадрокоптере бывают:
- Физический датчик;
- Виртуальный датчик.
Виртуальный датчик рассчитывает значение на основе показаний датчика напряжения и выходной мощности двигателей, поэтому, такой датчик не особо точный и на него лучше не полагаться.
Калибровка датчика напряжения betaflight
Этот датчик обязательно должен быть откалиброван (а по факту — настроен) для обеспечения точных показаний, ведь от этого зависит, насколько долго прослужат ваши аккумуляторы. Сейчас во многих полетных контроллерах есть встроенное OSD и можно настраивать отображаемую на экране полетную информацию и всегда пилоты добавляют на экран текущее напряжение аккумулятора, вот именно эту цифру и рассчитывает датчик тока в полетном контроллере. 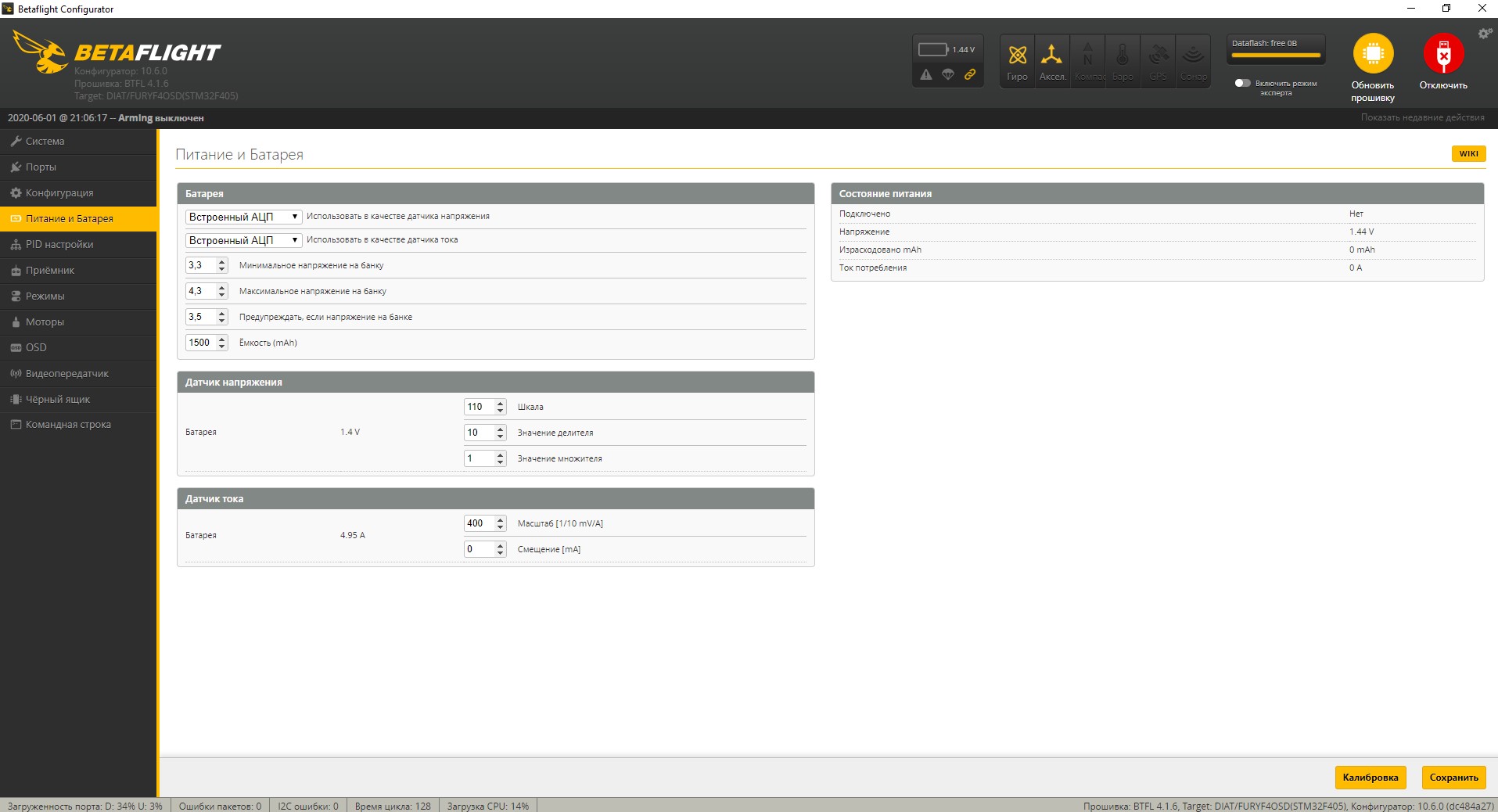
Калибровать датчик мы будем во вкладке Питание и батарея. Нам также понадобится вольтметр или другой прибор, которым можно будет измерить напряжение аккумулятора.
Здесь с правой стороны будет написано текущее напряжение аккумулятора, который измеряется датчиком квадрокоптера.
Все, калибровка датчика напряжения выполнена.
Калибровка датчика тока betaflight
Благодаря этому датчику, можно узнать фактическую емкость аккумулятора, поэтому, вы точно узнаете, сколько емкости аккумулятора потрачено во время полета.
Калибровка датчика тока сложнее, чем датчика напряжения. Вам понадобится также зарядное устройство, которое умееть подсчитывать миллиамперы, которыми был заряжен аккумулятор.
Смысл калибровки в том, что вы подсчитаете количество потраченных mAh во время полета, запишите это значение, а затем ставите аккумулятор на зарядку и после полной зарядки сравниваете числа. Естественно, что летать нужно будет для теста на полностью заряженном в балансировочном режиме аккумуляторе.
Значение прописывается в той же вкладке, что и напряжение, а значения показываются блоком ниже:
Командная строка (cli)
Через командную строку можно влиять на какую-либо информацию в прошивке, вносить изменения, а также выводить информацию о каком-либо параметре или компоненте. Список команд большой и выводится по команде «help». Все рассказывать здесь не будем, так как у нас опять есть отдельная статья по командной строке, если вам интересно, то ссылка ниже.
Конфигурация
На этой вкладке выполняются базовые настройки, такие как протокол связи полетного протокола с регуляторами оборотов, протокол связи приемника с полетным протоколом, расположение платы и многое другое.
- Настройки ESC/Моторов.
В этом блоке настраиваются протокол и двигатели.
DSHOT600 — это протокол на котором будут общаться регуляторы оборотов и полетный контроллер. Все современные ESC и ПК поддерживают DSHOT300, DSHOT600 и DSHOT1000 (есть и DSHOT1200). Выбирайте тот, который рекомендует производитель (такое всегда написано у продавца в товаре).
MOTOR-STOP — тут все понятно, после включения дрона (арминг) двигатели не будут крутиться. Обычно функцию не включают, так как нужно контролировать работу двигателей.
ESC_SENSOR — используется для включения телеметрии, если на ваших регуляторах для этого используется отдельный сигнальный провод.
Двухсторонний Dshot (на самом деле правильно Двунаправленный). Об этом читайте в этой статье: Двунаправленный (Bidirectional) DSHOT и RPM-фильтрация.
Полюса моторов — обязательно посчитайте количество магнитов в колоколе и напишите цифру в этом окошке.
Холостой ход — это то, с какой скоростью будут крутиться пропеллеры после арминга (включения). Обычно хватает 2-4%. - Расположение платы и датчиков.
В этом блоке обычно настраивается только «Первый ГИРО». Производители всегда ставят порт USB где-нибудь сбоку и пилот конечно же поставит плату полетного контроллера так, чтобы было удобно подключать провод. В этом случае, есть большой шанс, что Betaflight будет показывать модельку неправильно, то есть, вы наклоняете перед дрона вперед, а моделька наклоняется вправо. Чтобы это исправить, используется вот такой виртуальный поворот платы. - Arming.
Максимальный наклон коптера. Если будет стоять маленькое число, то у вас дрон будет запускаться только на идеально ровной площадке. Поставьте 180 градусов, тогда дрон можно будет запустить хоть боком. - Системные настройки.
Здесь выбирается частота обновления вычислений гироскопа и цикла PID, чем они больше, тем чище будет лететь квадрокоптер в воздухе, но нужно следить, чтобы у процессора был запас для дополнительной работы, эта строчка показывается в самом низу программы: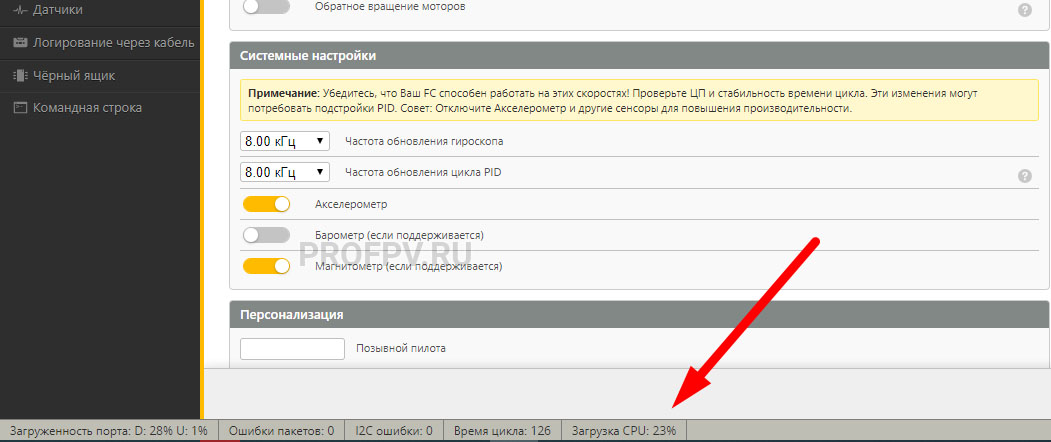 Как видите, в нашем случае загрузка при максимальных частотах всего 23-25%.
Как видите, в нашем случае загрузка при максимальных частотах всего 23-25%.
В этом блоке также включаются датчики полетного контроллера, в нашем случае включен Акселерометр и Магнитометр.
Акселерометр включает и отключает автоматическую стабилизацию квадрокоптера.
Барометр включает и выключает функцию удержания высоты.
Магнитометр — это компас, позволяет удерживать дрон в одном направлении. В гоночных не используется, но на скрине включен для эксперимента.
Их не включают только в некоторых случаях, но вам точно надо их включить. Барометра в нашем ПК нет, поэтому он отключен. - Приемник.
Здесь выбирается режим работы, в нашем случае выбран режим с последовательной передачей данных и протоколом SBUS. В зависимости от производителя, у вас будет свой выбор, например, у FrSky используется SBUS, а у FlySky — IBUS. Ниже таблица соответствия бренд/протокол:Название аппаратуры Serial Receiver Provider DSM2 Satellite SPEKTRUM1024 DSMX Satellite SPEKTRUM2048 FrSky RX SBUS Futaba RX SBUS FlySky RX IBUS Turnigy RX IBUS
После всех настроек, не забывайте нажимать кнопку «Сохранить и Перезагрузить» в нижнем правом углу, иначе у вас не сохранятся настройки.
Моторы
На этой вкладке проверяется работоспособность двигателей:
Перед любыми действиями, обязательно снимайте пропеллеры с двигателей!
Перед тем, как покрутить двигатели ползунками, переключите флажок «я понимаю всю опасность», чтобы активировать функционал. Теперь можете подвигать ползунки, моторы начнут крутиться: 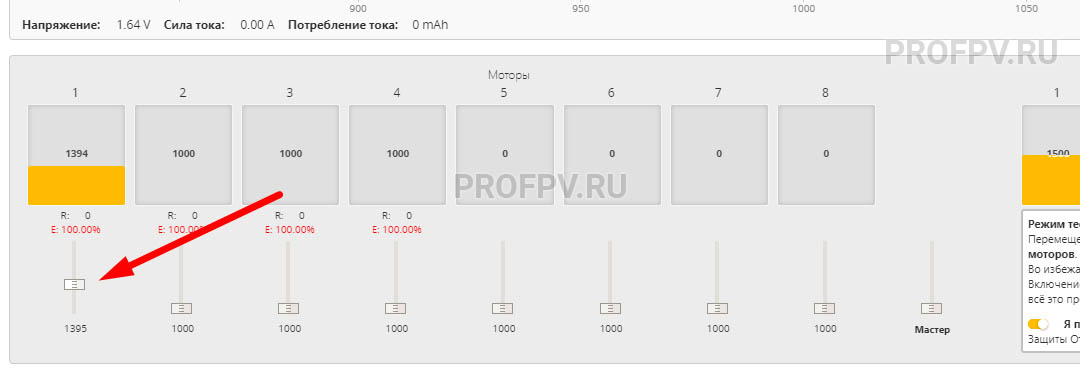
Чуть выше располагается график гироскопа, а также информация о том, сколько потребляют двигатели тока, а также силу и напряжение. Все это служит для проверки и настройки двигателей.
Настраиваем betaflight : 4 комментария
Привет. Сделайте какой-то список известных проблем. Например почему в программе не показывает, не работает аксерерометр и гироскоп. У меня например только барометр работает.
Скорее всего они просто отключены, см System Configuration.
Давно уже есть идея сделать FAQ или перевести его, времени пока нет.
Источник
Настраиваем телеметрию регуляторов скорости в betaflight
Телеметрия с регуляторов скорости позволит вам контролировать их температуру и обороты двигателей. Также можно узнать потребляемый ток без необходимости подключения отдельного датчика тока на ПК или PDB (контроль в реальном времени над током и израсходованной емкостью аккумулятора).
В этой статье я покажу вам, как настроить телеметрию (ESC Telemetry) в Betaflight и вывести значения на экран (OSD).
Настройка betaflight для первого полета
Тут мы пройдемся по основным параметрам Betaflight, необходимым для первого полета.
Важно! Снимите все пропы с коптера прежде чем начинать настройку!
Обзор betaflight f4
На самом деле мне очень понравился обновленный контроллер, он может дать все что нужно пилоту в плане функций, которые настраиваются в Betaflight конфигураторе.
Стильный дизайн и хорошая пайка: все элементы качественно пропаяны, так как сама плата очень прочная, 6-ти слойная, такая сможет выдержать большие нагрузки и токи. При цене в 2000 рублей, этот контроллер дает возможности контроллеров за 3-4 тысячи.
Единственным недостатком я считаю то, что регуляторы подключаются снизу контроллера и могут возникнуть проблемы с подступами к этой части контроллера, особенно это будет трудно сделать, если контроллер уже будет установлен на раму. Отмерьте провода до регуляторов, припаяйте и потом уже устанавливайте полетник на раму.
Еще один недостаток, но он просто визуальный — остатки от перемычек плат, т.е. заготовку из текстолита разрезают между собой и остаются вот такие заусенцы:
Эта реликвия все еще устанавливается на платах, в том числе и на нашей новой F4. Это индуктор. К тому же, его криво припаяли:
Хоть это и не влияет на функциональность, но это наводит на мысли, что производитель может так некачественно относиться и к другим компонентам контроллера и кто знает, в какой момент это может всплыть.
Обзор btaflight, полетные режимы и настройки
Посмотрите видео Betaflight Прошивка и Настройка Квадрокоптера.
В Betaflight много настроек и полетных режимов, как их настраивать вы можете посмотреть в видео ниже.
Заливка Betaflight в Omnibus, настройка и калибровка датчиков.
Настройка полетных режимов в Betaflight.
Видео выше во многом пересекаются, но я включил сюда все те, которыми пользовался для настройки.
Внимание! Betaflight обновляется автоматически! После обновления требует новую прошивку. При этом ваши данные могут слететь, так что не зебываем сохранять их!
Ограничения связанные с использование телеметрии регуляторов
Датчики тока, встроенные в ПК или плату распределения питания, обычно ставятся сразу после разъема XT60, так что записывается весь потребляемый ток.
Телеметрия с регуляторов в принципе может заменить датчик тока на ПК/PDB, но это неточный способ измерения, т.к. измеряется только ток, потребляемый моторами. Потребление всей остальной электроники: FPV оборудование, приемник и т.д. — не учитывается.
Betaflight ESC Telemetry довольно ограничена в возможностях при отображении данных на экране (ноябрь 2023).
На заглавной картинке этой статьи видны обороты, температура и потребляемый ток каждого регулятора/мотора, это мой квадрик с ПК и регуляторами KISS. На мой взгляд, эта конфигурация очень полезна для анализа поведения коптера и моторов.
В Betaflight вы можете показать только температуру наиболее горячего регуля и средние обороты моторов.
На сколько я знаю, в Betaflight 3.3 будет больше параметров для отображения (надеюсь будет как в KISS OSD).
Питание и батарея
В этом разделе настраивается датчик тока, а также параметры аккумулятора. Все это нужно для того, чтобы квадрокоптер по OSD передавал актуальные и правильные данные об аккумуляторе, напряжении и токе во время полета.
У нас есть отдельная статья по этому блоку, рекомендуем к прочтению: Как откалибровать датчик тока и датчик напряжения в Betaflight
В этом разделе настраивается отображение различной информации на экране ваших очков или шлема. Очень полезный и нужный раздел, не пропускайте его.
Настраивайте все атк, как вам хочется. По центру имитация экрана, там все можно двигать мышкой. Слева поставьте галки на нужном параметре, он появится на окне. Если не знаете, что конкретно означает параметр, наведите мышкой — появится подсказка того, что делает этот параметр.
В нашем случае, включено:
- RSSI (сила приема сигнала);
- Предупреждения;
- Заряд аккумулятора;
- Таймеры.
У нас добавлено 2 таймера, один это общее время работы, а второй — время полета.
Справа находятся еще некоторые общие настройки, это тоже настраивается по вашему желанию.
Подключаем micro usb кабель
Подключенный MicroUSB кабель питает полетный контроллер.
В конфигураторе должен появиться новый COM порт, выберите его и нажмите «Connect«. В моем примере порт COM11, у вас скорее всего будет другой номер. При подключении разных ПК, номер порта тоже будет разным.
Порты
На этой вкладке находятся настройки для UART-портов, то есть, для последовательных портов, которые используются для обмена данными с различными компонентами, такими как приемник, видеопередатчик, GPS-модуль и так далее. USB VCP всегда включен, это тот порт, в который вы вставляете провод, microUSB.
В этом разделе обязательно нужно включить порт, который используется для обмена информацией с приемником. У различных полетных контроллеров он может быть разным, у нас Mamba F405 и у него порт для приемника — UART1. Поэтому включен ползунок на Serial Rx. Вам нужно посмотреть документацию к своему полетному контролеру, чтобы точно знать, какой порт включать для приемника.
Прежде чем начать
Чтобы сделать это руководство наиболее простым, я подразумеваю, что у вас есть вот это железо:
- Приемник FrSky с SBUS и SmartPort телеметрией
- Полетный контроллер на процессоре F3 или F4 с прошивкой Betaflight 3.2 или новее
- Регуляторы скорости, которые поддерживают протокол DShot
Процессор
Betaflight F4 как это ни странно, используется процессор F4, таким образом позволяя работать на частоте 8kHz и 8kHz с динамической фильтрацией, но в свою очередь, появляются проблемы с инвертированием UART — неизменной проблемой в контроллерах F4.
Рекомендации: проверка безопасности
Перед установкой пропеллеров, рекомендую выполнить ряд проверок, чтобы избежать проблем перед полетом.
Проверить направление двигателей
Перейдите во вкладку «Моторы» и включите режим тестирования по кнопке «Я понимаю всю опасность»:
Теперь запустите моторы (надеюсь вы сняли пропеллеры?) и проверьте, в правильную ли сторону крутятся двигатели в соответствии с этой схемой:
Проверить загрузку процессора
Пока квадрокоптер подключен к Betaflight, посмотрите на нижний сайд-бар:
Если загрузка будет 95% и выше, то у вас будут проблемы во время полета, так как процессор перегружен и не будет успевать вовремя обрабатывать данные. Чтобы решить эту проблему, отключите некоторые функции или отключите разгон, если у вас контроллер F4. Но на современных полетных контроллерах такая проблема — большая редкость.
Проверить гироскоп
Перейдите во вкладку Система и и проверьте настройки гироскопа:
Возьмите квадрокоптер в руки и наклоняйте его во все стороны, ваши действия точь-в-точь должна повторять 3D модель на экране. Стрелка указывает на нос дрона. Если это не так, вернитесь в начало статьи, «Конфигурация», блок 2. Кроме этого, после настроек и тем более прошивки, нужно калибровать акселерометр.
Источник
Требования к оборудованию
Платы и программное обеспечение:
- Регуляторы BLHeli32, у которых есть панелька телеметрии ESC (TX), а также прошивка последней версии, регуляторы могут быть, например, этих производителей:
Betaflight BLHeli32 ES
XRacer Quadrant BLHeli32 ESC - Какой-нибудь из полетных контроллеров F3, F4 или F7 с прошивкой Betaflight 3.1.0 или новее и с одним свободным портом UART
- Betaflight Configurator версии 1.8.5 или новее
Заключение
Калибровка датчиков тока и напряжения это важный момент в процессе настройки вашего квадрокоптера. Без правильных значений, вы не сможете точно контролировать разряд аккумуляторов, а значит будете его эксплуатировать неправильно, что приведет к более раннему выходу из строя и потери емкости.
Источник
Выводы
Несмотря на эти мелкие недочеты, я считаю Betaflight F4 лучшим контроллером полета на сегодняшний день. Можно смело сказать разработчикам: «Браво!». Работу они провели достойную.
Купить Betaflight F4: ЗДЕСЬ
